基于拟合优化的多传感器测距误差残差补偿修正算法设计*
2024-01-09 07:20刘利民
传感技术学报 2023年11期
胡 璞,刘利民
(1.武汉体育学院体育工程与信息技术学院,湖北 武汉 430079;2.桂林电子科技大学计算机工程学院,广西 桂林 541000)
多传感器测距技术作为自动化领域的热点,被广泛应用于船舶通讯、工业生产、材料测量等行业[1]。随着科学技术的发展,人们对多传感器测距技术也提出了更高的要求,不仅要求测距精准度高,还要求其具有良好的性能,其中的关键就是对多传感器测距存在的误差做出补偿措施。作为一种综合性的高技术产业,世界各国在传感器研发、设计、检测[2]和应用上,早已形成完整的产业链。通过上述分析可知,多传感器测距误差补偿方法成为目前亟需解决的问题和工作人员研究的热点。
闫文吉等[3]在二元插值算法的基础上,采用三次样条插值算法计算出多传感器的工作温度区间与输出电压,然后引入拉格朗日函数对温度区间与电压做出分段插值处理,可以有效降低线性误差,最后通过压力插值补偿完成多传感器测距误差补偿。该方法没有构建误差模型,导致误差补偿结果的残差平均值过大。Yao 等[4]提出霍尔传感器换向误差估计方法,基于换相误差下的换相过程分析,延迟换相误差的估计只需要换相瞬间的关断相电流,而换相后关断相电流减小到零的时间间隔较短。采用换向误差补偿方法实现了霍尔传感器误差补偿。该方法在不同转速、负载转矩和负载变化情况下均有效,具有良好的瞬态性能。但该方法没有对多传感器信号做出降噪处理,导致误差补偿的标准差过大。
为了解决上述方法中存在的问题,提出一种新的多传感器测距误差补偿方法。通过小波分析将多传感器分解为高频、低频信号,然后进行阈值量化。通过分别对高频信号和低频信号进行重构,实现了对噪声的抑制。利用坐标投影方法建立了误差模型,利用残差补偿方法对模型进行了修正。结合灰度重心法和电荷耦合原理实现了对多个传感器距离误差的补偿,以提高利用多传感器进行测距的精度。
1 信号降噪与构建误差模型
1.1 多传感器信号降噪
多传感器在测距过程中采集的信号存在一定噪声,利用小波变换法中的阈值滤波对信号做出降噪处理[5],具体步骤如下:
①信号分解。基于小波变换的多传感器信号降噪,首先对多传感器信号做出分解处理[6],将信号分成高频信号与低频信号,公式如下所示:
式中:D描述的是多传感器信号集合;φ(w)表示的是基本小波函数φ(t)的傅里叶变换形式;d表示的是多传感器信号。
②基于小波变换的多传感器测距误差补偿方法,将基本小波函数实施收缩移动处理[7],得到变换后的小波函数φm,n(t),用如下公式表示,其中m、n分别表示收缩因子与移动因子。
③阈值量化。小波变换中的阈值量化是利用多传感器信号和噪声在小波变换尺度空间中的不同特征而完成降噪处理,随着空间尺度的不断变换,高频信号中的噪声被不断抑制。假设信号中的噪声用e表示,则其基本模型可用如下公式表示,其中ζ为高频信号。
④信号重构[8]。基于小波变换的多传感器信号降噪,将经过阈值量化后的高频信号与低频信号重新组合到一起,完成基于小波变换的多传感器信号降噪处理,为构建误差模型避免受到噪声信号干扰的影响提供基础支撑。
1.2 构建误差模型
对于降噪后的多传感器信号,利用坐标投影[9]算法构建误差模型,具体步骤如下:
①基于小波变换的多传感器测距误差补偿方法,首先引入物理坐标系,以绝对零位为原点,利用融合了物理坐标系的数据推导出多传感器坐标系,用如下公式表示:
式中:多传感器坐标系的坐标轴分别为X轴、Y轴、Z轴;X0、Y0、Z0表示多传感器坐标系点在物理坐标系中的对应;x、y、z分别表示物理坐标系;E为坐标系之间的距离;M表示的是多传感器测量值。
②基于小波变换的多传感器测距误差补偿方法,利用物理坐标值具有均匀分布的特点,可以将多传感坐标系中的元素归一化[10]处理,使元素映射到固定区间内,公式如下所示:
式中:Z'为映射后的多传感器Z0轴;N表示的是归一化处理系数。
③根据映射后的多传感器坐标系元素,计算出多传感器测距中误差的三维图像。以映射后得到的Z'轴上任意一点作为原点,以多传感器坐标系中的横、纵坐标轴为三维图像的横、纵坐标轴。提取并标记图像中的全部区域,然后利用霍夫变换[11]算法检测出区域中的所有直线,公式如下所示:
式中:L表示误差三维图像中的所有直线;Zmin、Zmax分别表示Z0坐标轴方向的最小值与最大值。
④基于小波变换的多传感器测距误差补偿算法,在标记的误差图像区域中,取两条不相交的直线为直径绘制两个圆。然后通过图像坐标计算出两个圆的坐标以及圆心之间的距离,公式如下所示。圆心距离上的所有点即构成多传感器的误差模型。
式中:AL、BL为两个不相交的圆;PAB表示的是圆心之间的距离;XA、XB代表圆心与横坐标之间的距离;YA、YB表示的是圆心与纵坐标之间的距离。
2 误差补偿算法设计
在对多传感器信号降噪、构建误差模型的基础上,设计误差补偿算法,以期提高多传感器测距的准确性。在多传感器实际测距过程中,针对线性拟合造成的一系列误差,基于小波变换的多传感器测距误差补偿方法,在构建的误差模型中带有拟合优化的残差补偿法对误差实行修正,可以提高多传感器测距精准度,完成多传感器测距的误差补偿[12]。具体过程如下:
①基于小波变换的多传感器测距误差补偿方法,首先利用多传感器标定测距目标,然后根据多传感器三角测距原理与沙姆条件计算出线性拟合关系式,公式如下所示:
式中:l表示的是测距目标表面的位移量;k为多传感器中的位移量;f表示像距;μ表示入射角;ν为光轴与多传感器之间的夹角。
②根据式(1)可以推导出物理分辨率o,物理分辨率与测距目标表面的位移量成正比;与多传感器位移量、像距、入射角成反比。其计算公式如下所示:
③在基于小波变换的多传感器测距误差补偿方法中,将多传感器的位移量、测距目标表面位移量和物理分辨率之间的线性关系量绘制成表1。

表1 线性拟合关系
针对表1 中的拟合数据可以确定出多传感器的位移量与测距目标表面位移量之间的方程式,公式如下所示:
④引入与残差补偿相关的拟合优化系数,由于多传感器位移量与残差满足二次函数关系,为此根据二次拟合得到残差与多传感器位移量之间的线性拟合数值关系,如表2 所示。
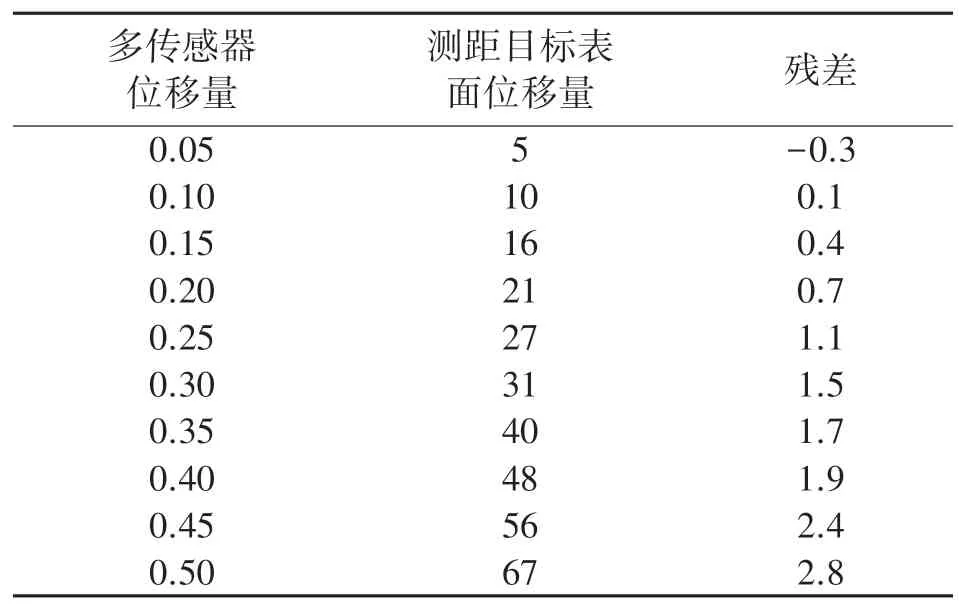
表2 残差拟合关系
根据表2 中的数值可以确立多传感器位移量与测量表面位移量之间新的方程式,公式如下所示:
⑤基于小波变换的多传感器测距误差补偿方法,将式(11)与式(12)叠加计算,得到修正后的多传感器位移量与测距目标表面位移量的关系式,完成误差补偿处理。公式如下所示:
⑥在多传感器测距过程中,采用拟合优化的残差补偿算法消除测距过程中的线性误差后,还要考虑光斑给测距过程带来的影响,所以采用灰度重心算法结合电荷耦合原理消除测距过程因光照造成的光斑影响,提高测距精准度,完成基于小波变换的多传感器测距误差补偿。综上可知,多传感器测距误差补偿流程如图1 所示。

图1 误差补偿流程
3 实验测试分析
为了验证基于小波变换的多传感器测距误差补偿方法的整体有效性,需要对基于小波变换的多传感器测距误差补偿方法做出测试。
将10 个DYRAN-0500 型测距传感器布设在100 m×100 m 的草地上,该区域内随机设置10 个目标点,利用多传感器测量10 个目标点之间的距离,实验现场设置如图2 所示。在MATLAB 平台上输入实验现场测量数据,编写多传感器测距误差补偿的处理程序,利用多传感器进行目标点测距。将残差平均值、标准差、采集多传感器信号能力作为指标,采用基于小波变换的多传感器测距误差补偿方法、文献[3]方法和文献[4]方法做出对比测试。

图2 实验现场设置图
①残差平均值
残差平均值代表的是实际测量值与拟合值之间的偏差,可以反映误差的观测值。残差平均值越大,表明方法误差补偿结果与实际值之间的偏差越大;残差平均值越小,表明方法误差补偿结果存在的偏差越小。采用所提方法、文献[3]方法和文献[4]方法对10 组多传感器测距过程做误差补偿,对比各个方法的残差平均值。不同方法的仿真结果如图3 所示。
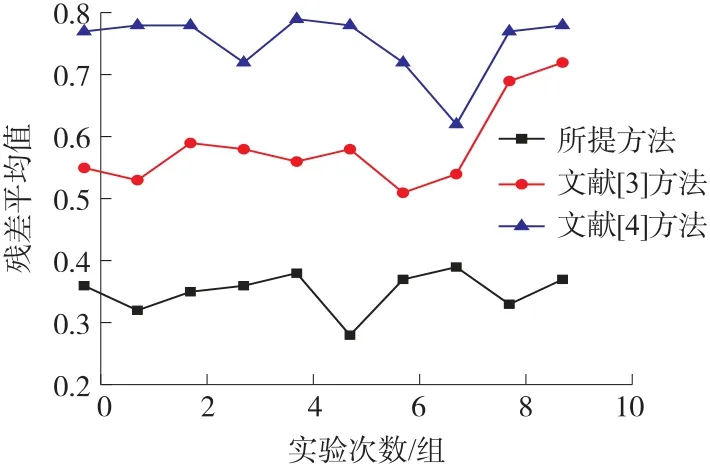
图3 不同方法的残差平均值
针对多传感器测距的误差进行补偿,所提方法的残差平均值在0.37 附近波动,文献[3]算法和文献[4]算法的残差平均值分别在0.58 和0.72 附近波动,通过对比发现,在不同仿真序号下所提算法的残差平均值均小于文献[3]算法和文献[4]算法的残差平均值,表明所提算法误差补偿的结果与实际值之间的偏差更小。
所提方法对多传感器测距误差补偿前,构建了误差模型,并在误差模型中利用带有拟合优化的残差补偿法对误差做出了修正处理,使误差补偿结果与实际值之间的偏差较小。
②标准差
标准差表示各个方法对多传感器测距误差补偿结果与平均值的离散程度。标准差数值越大,表明方法的误差补偿结果与平均值之间的差异越大,即误差补偿结果不稳定。标准差数值越小,表明方法的误差补偿结果与平均值之间的差异越小,即误差补偿结果比较稳定。
为保证测试结果的公正性,本次测试在10 组多传感器测距环境下完成,将所提方法、文献[3]方法和文献[4]方法的标准差测试结果绘制成图,方便分析如图4 所示。

图4 不同方法的标准差
无论是哪组仿真中,所提算法的标准差均低于文献[3]算法和文献[4]算法的标准差,平均值为0.42。并且随着仿真次数的增加,所提方法的标准差数值比较稳定,没有发生明显浮动,而文献[3]算法和文献[4]算法的标准差数值上下浮动较大。表明针对多传感器测距的误差补偿,所提方法的误差补偿结果与平均值之间的差异较小,即所提方法的误差补偿稳定性强于文献[3]算法和文献[4]算法的稳定性。
③采集传感器信号
采用所提方法、文献[3]算法和文献[4]算法采集15 组多传感器的信号。将所提方法、文献[3]算法和文献[4]算法采集的多传感器信号频率与实际信号频率相比较,如图5 所示。

图5 不同方法的采集信号频率
针对多传感器信号的采集,所提方法采集信号的频率与实际信号频率基本完全一致,误差平均值小于1 Hz。而文献[3]算法和文献[4]算法采集的多传感器信号频率与实际信号频率相差甚远。由此可见,本文方法能够准确采集多传感器信号,说明针对多传感器测距误差补偿,所提方法采集的多传感器信号更加准确。这可能是由于本文方法利用小波分析将多传感器分解为高频、低频信号,分别对不同信号进行重构,实现了对噪声的准确抑制,因此采集的多传感器信号更加准确。
4 结束语
经测试发现,目前多传感器测距误差补偿方法存在残差平均值较大、标准差过大、测距目标定位效果差的问题,为此提出基于小波变换的多传感器测距误差补偿方法。该方法首先利用小波变换中的阈值滤波对多传感器信号进行降噪处理,然后根据预处理后的信号构建误差模型,最后在误差模型中采用带有拟合优化的残差补偿法对误差进行修正,完成多传感器测距的误差补偿。实验结果表明该方法采集信号频率误差平均值小于1 Hz,残差平均值、标准差平均值分别为0.37、0.42,降低了残差平均值与标准差的同时,提高了算法采集信号的精准度。
猜你喜欢
网络安全与数据管理(2022年3期)2022-05-23
北京航空航天大学学报(2020年10期)2020-11-14
科学(2020年3期)2020-01-06
自动化学报(2019年6期)2019-07-23
成都信息工程大学学报(2019年1期)2019-05-20
铁道学报(2018年5期)2018-06-21
成都信息工程大学学报(2017年4期)2018-01-22
电子制作(2017年7期)2017-06-05
河南科技(2015年8期)2015-03-11
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01