基于分层生成对抗网络的短临降水预报方法研究*
2024-01-16 07:20曾强胜郭敬天黄文华
中国海洋大学学报(自然科学版) 2024年2期
曾强胜, 郭敬天, 任 鹏, 黄文华, 王 宁
(1. 国家海洋局北海预报中心, 山东 青岛 266061; 2. 中国石油大学(华东)海洋与空间信息学院, 山东 青岛 266555)
短临降水预报在气象防灾减灾中发挥重要的作用,根据世界气象组织(World metecorological organization,WMO)的定义,短临预报一般是指在0~2 h的时间内对某一区域内的降雨量或强对流天气等天气现象进行预测[1]。然而,建立一个有效的短临降水预报模型面临巨大的挑战。首先,降水本身是一个非常复杂的非线性问题,涉及水循环过程中地面与空中水分、热量、动量等交换问题;其次短临降水多发生于中小尺度天气系统,其具有一定的突发性,同时短临降水自身也具有速度快、空间小的特点,因此对其预报具有一定的难度[2]。雷达回波图具有较高的时空分辨率,近年来随着雷达探测技术的快速发展,出现了大量的雷达回波图序列,以可视化的方式反映了雷达回波演变过程的时空变化,成为短临降水预报的主要工具。传统的雷达回波推演的方法主要有单体质心法(SCIT)、雷达回波关联算法(TREC)[3]和光流法[4]。其中,SCIT法通过计算单体质心位置、体积等特征,以连续多时刻的追踪结果外推进行预警。SCIT法适用于对强雷暴单体的识别追踪和短临预报[5],然而SCIT法对弱回波信息不敏感,致使外推结果往往缺失弱回波信息。TREC法通过最优化雷达回波序列的空间相关性,获取对流系统不同位置的移动矢量,用以对雷达回波进行外推预报[6],该方法对强雷达回波的识别效果良好,但对于目标是多个单体且彼此距离较近时,其识别和追踪的效果较差[7]。光流法通过计算雷达回波图的光流场获取连续时刻雷达回波场位移矢量,对雷达回波进行外推。然而光流法对历史雷达资料利用率不充分,无法准确挖掘雷达回波演变的内在规律。
针对上述传统方法存在的问题,本文尝试将深度学习法应用到雷达回波外推中。目前将深度学习模型应用于短临预报还处于起步探索阶段,陈家慧等[8]首次使用BP神经网络对雷达回波进行外推,验证了将深度学习法应用于雷达资料外推的可行性。冯汉中等[9]使用支持向量机(SVM)完成了对降水量的预报。Klein等[10]对卷积神经网络(CNNs)进行改进,引入了动态卷积层,改进后的模型可以生成两个预测概率向量,对雷达回波进行外推。Shi等[11]为了克服长、短时记忆单元(LSTM)无法提取雷达回波空间特征这一缺陷,提出将卷积LSTM(ConvLSTM)网络应用于降水预报中,但存在对不同的时空位置,连续帧的局部相关结构不同的问题。Shi等[12]改进了模型,引入具有可学习卷积的TrajGRU模型,较之连接结构固定的ConvGRU更加灵活。Singh等[13]在循环神经网络的基础上增加卷积结构,以此捕捉雷达回波图像的时、空依赖性,实现了基于雷达回波图像序列的预测。郭尚瓒等[14]将传统的光流法与多层感知器(MLP)相结合,实现了对某区域未来36 min内的降水概率的预测。郭瀚阳等[15]使用自编码的ConvGRU对雷达回波进行外推,结果同传统的TERC法相比,深度学习模型表现优异。然而,上述的方法生成的影像不够清晰,相对于观测影像,忽略了很多细节,且随着预测时间的推移几乎不能准确预测出未来回波的位置等问题。目前,生成对抗网络(GAN)[16]是近年来提出的在复杂分布上最具前景之一的无监督学习模型,其在影像生成方面表现优异,能够生成足够清晰的影像,使GAN的众多变体[17]在预测视频帧方面的有效性得到了验证。
现有的GAN框架由生成器和鉴别器组成,该模型框架可以对历史的雷达回波图进行训练,生成未来时刻的雷达回波图序列。然而,将GAN直接应用于雷达回波的视觉预测得到的结果往往产生低质量的图像,特别是在雷达回波演变的区域。造成图像质量低下的原因包括两方面:首先GAN训练的过程涉及到图像的下采样,而图像的下采样会导致图像分辨率的丢失。其次鉴别器作用于整张图像,对雷达回波和静止的底图不加区分的训练不能有效地拟合局部的雷达回波演变趋势。针对上述问题,本文在GAN的基础上开发了一个以全局生成器和局部鉴别器构成的分层生成对抗网络(HGAN),以多层子网构建全局生成器用以生成未来时刻的雷达回波图,采用上采样过程训练模型,以期生成的影像具备更多的细节。同时局部鉴别器根据局部区域将预测的雷达回波图与观测的雷达回波图区分开,避免采用原始GAN以整张影像作为判别依据,降低背景底图对结果的影响;引入缓冲区机制,保存历史预测序列,使最终预测的结果更加符合时序性。以历史的雷达回波图序列作为原始训练数据,对全局生成器和局部鉴别器进行对抗性训练,以期生成足够清晰的未来时刻雷达回波图序列,为雷达回波的演变趋势提供视觉指示,提高对短临降水预报的准确性。
1 数据源介绍
本文使用中央气象台提供的雷达拼图数据,该数据由多普勒天气雷达系统处理生成。多普勒天气雷达系统是由多波段(S,C)、多型号(SA,SB,SC,CC)雷达组成,采用了多站资料自动获取、数据的归一化处理、数据质量控制、坐标转换和地理信息叠加等技术,生成的雷达回波拼图能准确、快速地反应降水过程演变情况。将获取的雷达拼图进行预处理,保留图像中心的360×260像素区,研究区域的范围是104°16′E—119°10′E、22°50′N—35°34′N,过滤掉雷达回波面积覆盖率小于1/10的个例,由此构建数据集对HGAN进行试验评估。
2 模型与改进
2.1 分层生成对抗网络模型架构
本文开发了一个基于分层生成对抗网络(HGAN)的短临降水预报模型,该模型以历史雷达回波序列作为输入,并生成揭示雷达回波演变规律的未来雷达图序列。HGAN由一个全局生成器和一个局部鉴别器相互对抗训练构成。图1为HGAN结构的样例,它是由一个全局生成器G和一个局部鉴别器D组成,其中全局生成器由两个分层的子网络G0、G1构成。

图1 分层生成对抗网络
全局生成器由众多子网络以分层结构构成。每一子网生成不同分辨率尺度的雷达回波图。从上层子网生成的小尺度分辨率雷达回波图将被用作下层子网的输入。图1中的蓝色虚线框中展示了一个带有两个层次子网的全局生成器G的例子。G0、G1是G的两个子网络,且都是卷积神经网络。输入X是按照时间顺序排列的雷达回波图序列,展示了雷达回波的结构和演变趋势。X包含X0、X1两个子序列,它们是两个采样尺度下的相同的雷达回波图序列。将X1输入到G1子网中,生成与X1相同分辨率的未来时刻雷达回波图G1(X1)。下层子网G0将X0和经过上采样的G1(X1)图像作为输入,生成与X0相同分辨率的未来时刻雷达回波图G0(X0)。重复上述操作,最下层子网生成的图像将作为全局生成器G生成的最终预测图像。卷积神经网络中涉及的下采样过程会造成分辨率的损失,并导致生成的雷达回波图质量低,特别是在雷达回波演变的区域,生成的图像回波边缘将会变得模糊。全局生成器使用上采样和卷积神经子网的分层策略,来弥补这一缺陷。全局生成器通过历史雷达回波序列学习雷达回波的演变趋势,并生成未来雷达回波图,提供雷达回波的可视化预测,以提高短临降水的准确性。
局部鉴别器将预测的雷达回波图与观测的影像进行区分。如图1所示,局部鉴别器D判断一张影像是观测影像还是由鉴别器G生成的预测影像。对于一张雷达回波图,它具备正在演变的雷达回波以及静止的底图两个部分。演变的雷达回波较之静止的底图更难预测,且往往位于影像平面上特定的局部区域。因此,传统的鉴别器基于整张影像来判断其是否为观测值将存一定的误差。本文引入了基于局部区域的局部鉴别器用以区分预测的影像与观测的影像。具体来说,将输入的影像分割成若干局部区域,局部鉴别器将给出每个区域为观测影像的概率如图2所示。
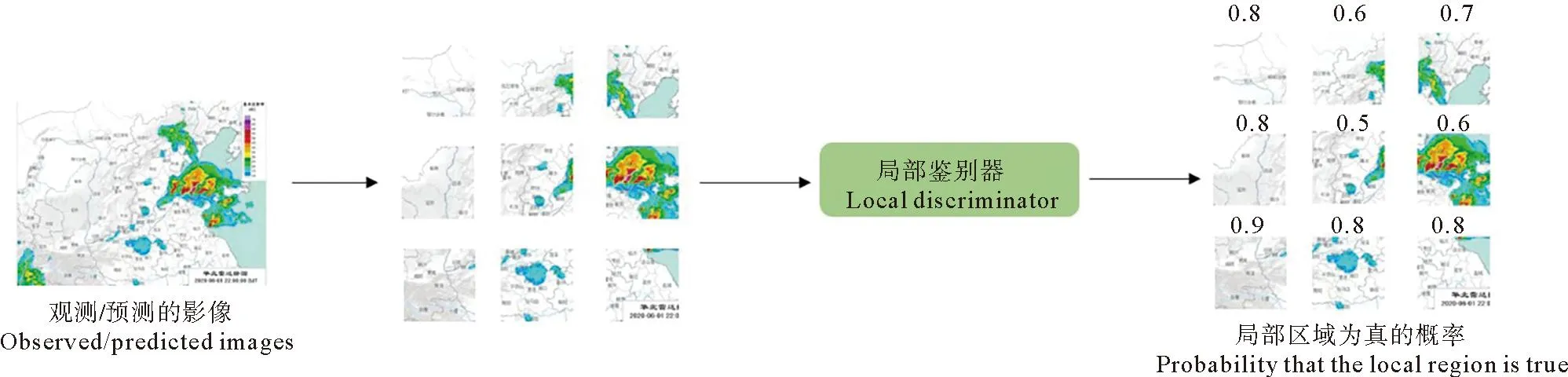
图2 局部鉴别器处理过程
将所有局部区域的预测概率组合起来进行判别,相对于整个静止的底图,局部鉴别器可以更好地描述局部区域内移动的雷达回波的特征。因此,鉴别器的局部检查、辅助生成器生成的预测影像更接近其对应的观测影像,可以更清晰地描述雷达回波的演变。
2.2 损失函数
本文使用对抗性损失来训练全局生成器和局部鉴别器,按照对抗策略,交替更新全局生成器和局部鉴别器。假设全局生成器有M层子网,用Gm(Xm)表示全局生成器子网络生成的雷达回波图,Tm表示它们对应的观测的影像。训练全局生成器的对抗损失LG-adv函数如下:
(1)
式中D(Gm(Xm))表示输入的图像是观测雷达回波图的概率。通过最小化全局生成器的对抗损失函数(见式(1)),驱动全局生成器生成足够真实的影像。为了使进一步提高生成影像的质量,本文引入了L1损失函数,LG-adl梯度差损失。
同时为了约束噪声,防止生成的影像受到伪影影响,本文引入总变分损失LG-tvl,定义如下:

(2)
全局生成器的总损失LG函数如下:
LG=γ1LG-adv+γ2L1+γ3LG-adl+γ4LG-tvl。
(3)
式中γ1、γ2、γ3和γ4为经验加权参数。
通过最小化总损失函数(见式(3)),驱动全局生成器生成高质量的难以被局部鉴别器鉴别的未来雷达回波影像,而局部鉴别器的对抗损失LD-adv函数如下:

(4)
式中1-D(Gm(Xm))表示全局生成器生成未来影像为真的概率。通过最小化局部鉴别器的对抗损失(见式(4)),使得局部鉴别器将Tm和Gm(Xm)正确的分类为观测影像和预测影像。
HGAN的全局生成器生成未来影像,局部鉴别器对生成影像与观测影像进行鉴别。通过同时最小化损失函数(见式(1)和式(4)),生成器与鉴别器之间相互博弈,对抗学习,既增强了生成器的拟合样本空间的能力,也增强了鉴别器的鉴别能力。模型最终生成鉴别器无法区分的足够真实的未来雷达回波图,用以辅助短临降水预报。
2.3 模型改进
在分层生成对抗网络生成未来时刻雷达回波图的过程中,全局生成器生成影像、局部鉴别器鉴别影像是否为生成器预测的影像,需要判别。当局部鉴别器只关注当前预测的影像,将很容易被当前预测的影像所迷惑,从而忽略了预测的雷达回波图的时序性。为了解决这一局限,使得预测的影像更加符合其本身的时序性,并加强局部鉴别器区分预测影像的能力,本文使用缓冲区存储历史预测的雷达回波序列,如图3所示。
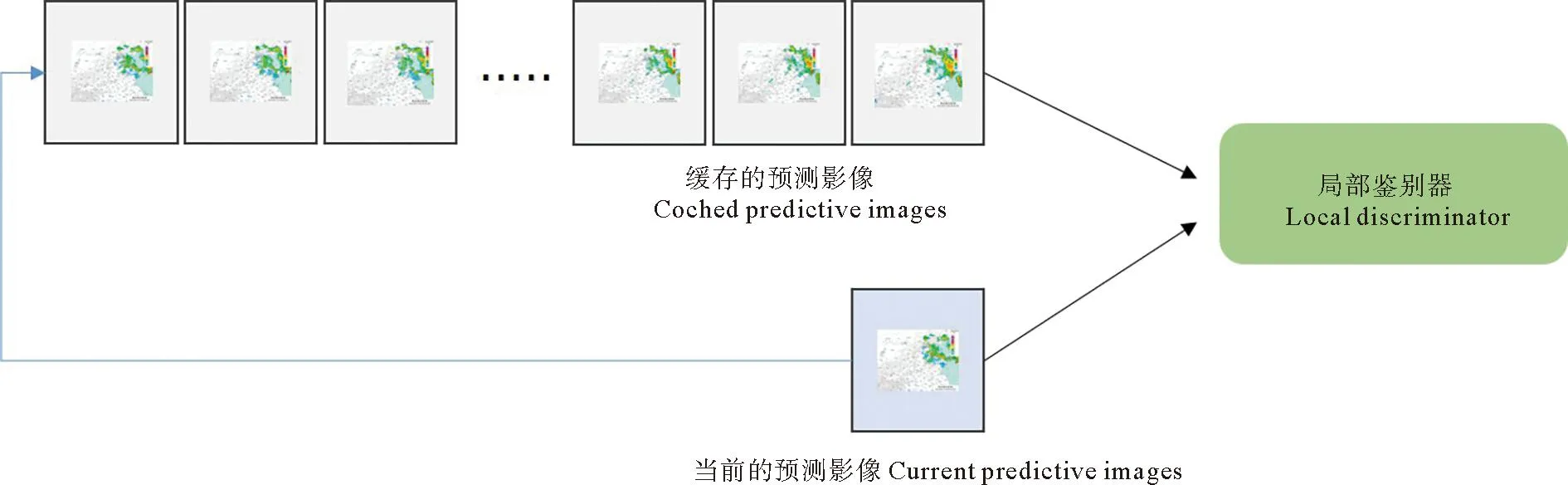
图3 缓冲区结构
缓冲区的引入,使得局部鉴别器可以基于当前预测和历史预测的结果进行更新判别。在每一次训练鉴别器的迭代中,局部鉴别器将结合当前预测的雷达回波图和从缓冲区随机采样的影像进行更新。在每一次训练迭代后,遵循“先进先出”的原则,将当前预测的雷达回波图放入缓冲区并去除最早进入缓冲区的影像以此更新缓冲区。同时缓冲区的大小是固定的,在实际情况中缓冲区的大小远远大于图3所示大小,并且微调缓冲区的大小并不影响模型的性能。通过引入缓冲区,使得最终的模型预报生成的雷达回波序列更加符合数据本身的时序性。
3 试验
3.1 试验设置
本文使用2019年6—8月和2021年6—9月,时间间隔为10 min的雷达拼图,并过滤掉雷达回波面积覆盖率小于1/10的个例,共计24 307张影像建立了一个训练集,使用2020年7、8两个月的雷达拼图,共4 285张影像构建测试集。训练后得到的模型将利用历史1 h的雷达回波资料来预测未来1.5 h内逐10 min的雷达回波。在试验过程中,将从HGAN模型获取的未来时刻的雷达回波图与从GAN获得的影像进行了经验比较。使用同HGAN全局生成器的最终子网相同的架构构建了GAN的生成器,用来提高GAN生成图像的质量,以保证两模型比较的公平性。
3.2 模型评价指标
为了检验模型预测的性能,对模型生成结果的检验使用在不同阈值、相同预报时效的评估方法。选取20、30、40和50 dBz作为判别阈值,预报时长为90 min,预报步长均为10 min,使用临界成功指数(CSI)、命中率(POD)、虚警率(FAR)作为模型评价指标。假设检验的雷达回波的阈值为k dBz,将预测的雷达回波图与观测的雷达回波图进行逐点对比,判断每个像素点是命中点(TP)、空报点(FP)、漏报点(FN)。三个评估指标的计算公式如下:
(5)
(6)
(7)
同时为了定量评估预测雷达基本反射率影像的质量,在试验环节计算了预测图像相对于真实的观测图像之间结构相似性指数(SSIM)[18]。SSIM的值越大,表示预测的影像与其对应的观测的影像越相似。
3.3 试验结果与分析
分层生成对抗网络HGAN和生成对抗网络GAN在测试集上的结果如表1所示。

表1 预报评分Table 1 Prediction score
从表中可以看到,在30、60和90 min预测中,不同阈值下,HGAN的临界成功指数(CSI)、命中率(POD)数值均高于GAN,同时其对应的虚警率(FAR)更低。然而随着预报时长的增加,两个模型在相同阈值下,均表现为CSI、POD随着预报时长增加而下降,FAR随着预报时长增加而上升,这说明随着预报时长的增加,两个模型的预报准确率逐渐下降。同时从表1中也可以看出,同一模型在相同预报时长下,雷达回波的强度越强,其预报的准确率越低。但表中也反应出对于强回波的演变趋势的捕捉,HGAN总体上是优于GAN。郭瀚阳等[15]于2019使用自编码的ConvGRU对雷达回波进行1 h内外推。本试验结果相较于其试验结果,30 min模型预报评分,CSI提升0.104,POD提升0.042,同时FAR下降0.118。
图4、5是2020年7月11日一次降水过程对应的天气图和地面观测以及模型预测结果示意图。从图4中可以看到,受地面气旋倒槽影响,在陕西、河南等地出现了降雨。图5中GAN和HGAN都能够在视觉上预测得到接近观测影像的雷达回波。从10~90 min可以观察到地面观测雷达回波在向安徽方向移动,GAN和HGAN模型预测的雷达回波都符合这一演变趋势。这说明两个模型都可以有效地捕获雷达回波演变的时空特征。从图5中我们可以看到,对于较弱的回波,如15 dBz的雷达回波,也就是图中淡蓝色的区域,来自HGAN的预测影像比来自GAN的影像更接近观测的影像,同时也展现了更多的细节。同样的对于较强的回波,如50 dBz的雷达回波,即图中的红色区域,GAN在第90 min中的预测已经无法有效地预测其回波细节,而HGAN对于强回波的演变依旧同真实图像有着一定的相似程度。这说明了HGAN对雷达回波的细节刻画优于GAN,且对于强回波演变趋势的推演更具有优越性。
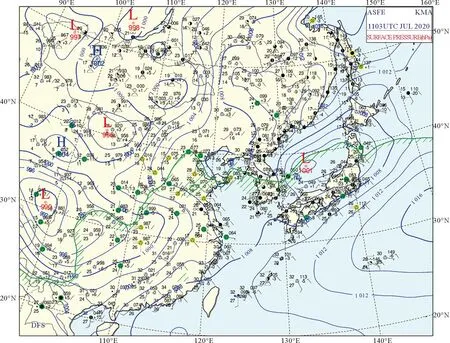
图4 2020年7月11日03 UTC地面天气图
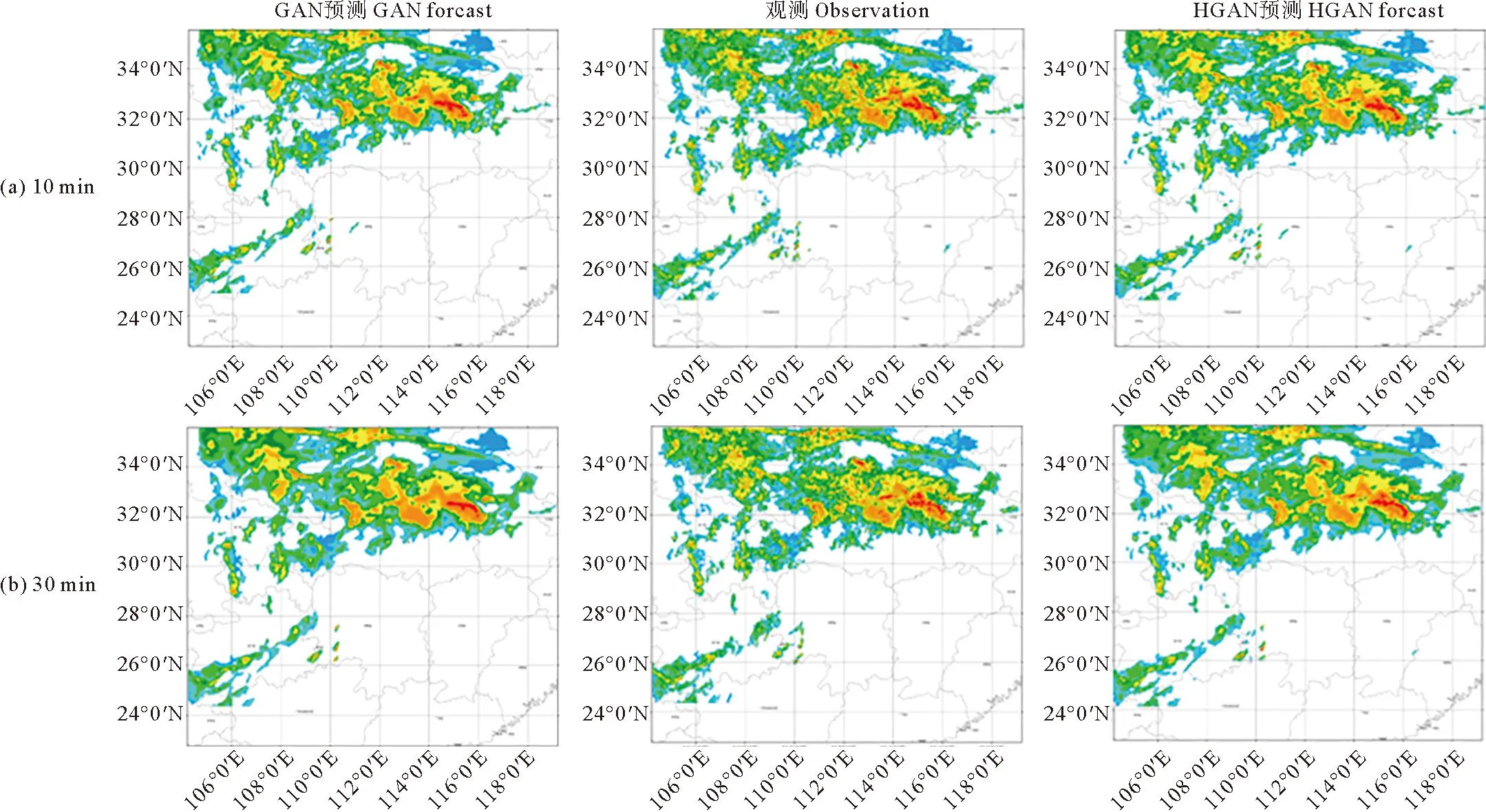
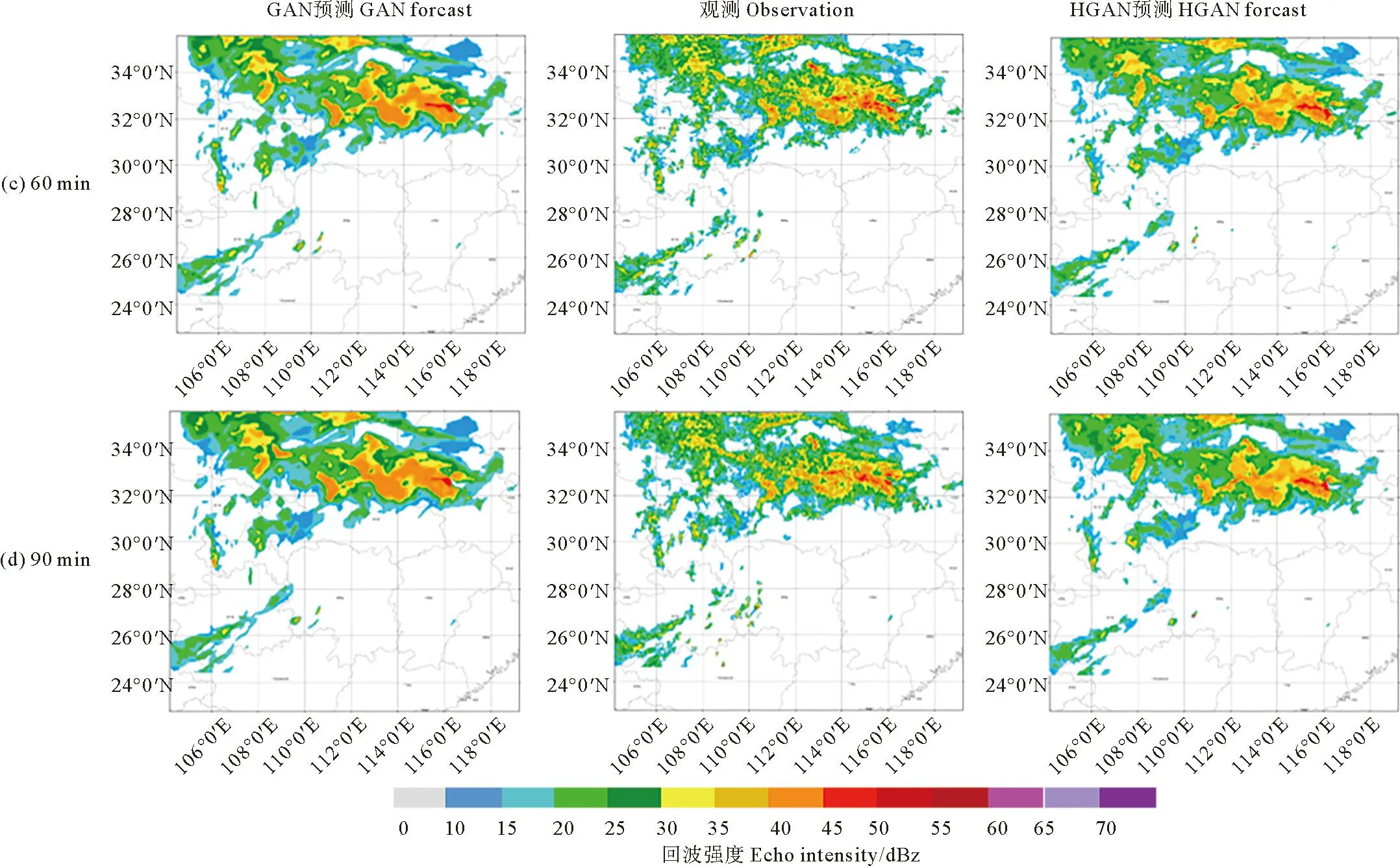
图5 2020年7月11日气旋降水过程雷达观测与模型预报结果
图6、7是2020年8月19日一次降水对应的天气图和地面观测以及模型预测结果示意图。从图6中可以发现,位于鄂霍斯克海的气旋向西南经日本海进入中国的低压带,与大陆高压之间形成冷锋,引发降水现象。图7中,GAN和HGAN可以有效模拟雷达回波的形态和演变情况。从图中也可以观察到来自HGAN的预测影像展现的细节相对于GAN更加接近地面观测的影响。对于弱回波,也就是位于雷达回波边缘的淡蓝色区域,可以看到位于113°00′E、35°30′N附近的淡蓝色区域,图中的观测影像随着时间的推移,淡蓝色区域在逐渐消失,HGAN生成的影像很好地模拟了这一演变趋势,而在GAN生成的影像中,该处的淡蓝色区域并没有明显的变化;对于较强的回波,即图中的红色区域,GAN从30 min开始已经无法有效地预测其回波细节,HGAN在30 min则是较为接近。随着预测时间的延长,GAN对于强雷达的模拟已经隐约可见,而HGAN仍能一定程度的模拟强雷达回波的演变过程。
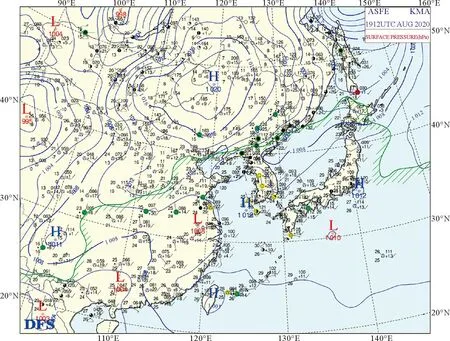
图6 2020年8月19日12UTC地面天气图
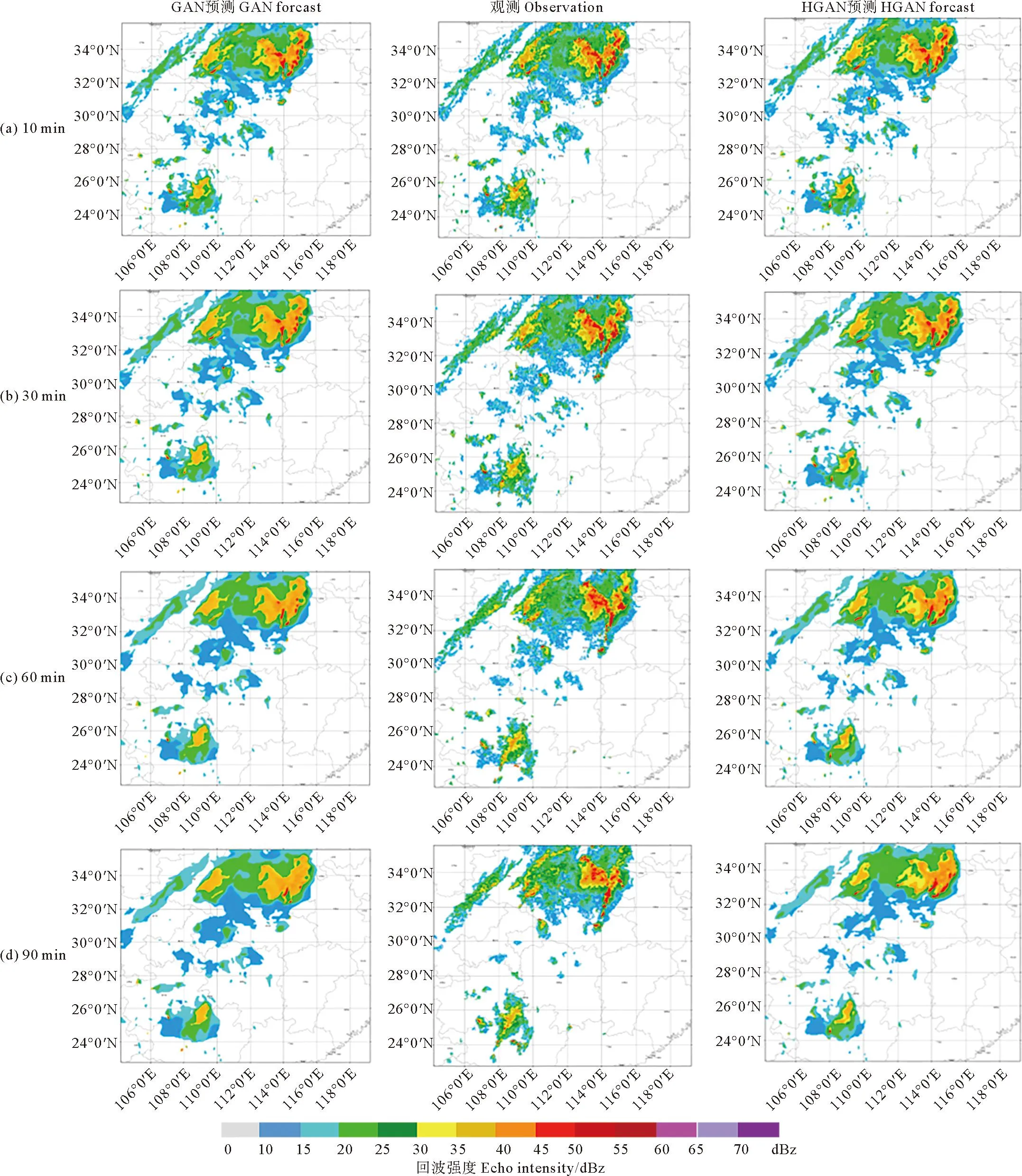
图7 2020年8月19日锋面降水过程雷达观测与模型预报结果
为了进一步评估预测的未来时刻雷达回波图的质量,本文基于整个测试集计算了预测的未来雷达回波影像相对于其对应的观测影像的结构相似性指数(SSIM)。SSIM值越大,说明预测的影像与其对应的观测影像越相似。从图8中可以观察到,HGAN在同一预报时长下SSIM指标上总是优于GAN。这说明在相同的预报时长下,HGAN预测的影像较之GAN预测的影像更接近其对应的雷达观测影像,对于回波强度的极值也就是影像图中强回波区与弱回波区的刻画优于GAN。

图8 结构相似性指数评分
4 讨论与结语
本文在原始生成对抗网络GAN的基础上,开发了一种基于历史雷达回波图序列生成未来雷达回波图的分层生成对抗网络HGAN,用于雷达回波可视化预报。HGAN由一个全局生成器和一个局部鉴别器组成,全局生成器通过上采样的方式生成尽可能逼真的未来雷达回波图,局部鉴别器基于局部区域鉴别预测的雷达回波图和观测的雷达回波图,引入缓冲区机制,鼓励全局生成器生成足够真实的雷达回波序列。与直接应用GAN、层次结构使得HGAN能够生成质量更高的雷达回波图,尤其是雷达回波演变的区域。该方法准确预报了雷达回波极值和范围,提高了降水量和落区的预报准确性。
需要指出的是,把深度学习的方法应用到气象领域仍处于探索阶段,尚有较大的改进空间。本文提出的分层生成对抗网络HGAN模型适用于数据集覆盖区域,对于覆盖区域外短临降水预报的准确性仍需进一步探讨。后续可以进一步优化其全局生成器的结构,改善模型的性能,提高对强回波变化趋势的预报能力。同时设计自动化程序,自动下载并处理数据,以扩充数据集,扩大模型可适用范围,并定时更新迭代模型,逐渐提高模型预报的准确性。
致谢:感谢国家海洋局北海预报中心王彬工程师在本文写作过程给予的很多指导和帮助。
猜你喜欢
通信学报(2022年10期)2023-01-09
数学物理学报(2022年4期)2022-08-22
数学物理学报(2022年2期)2022-04-26
黑龙江气象(2021年2期)2021-11-05
国防科技大学学报(2019年4期)2019-07-29
金桥(2018年4期)2018-09-26
家教世界(2018年16期)2018-06-20
系统工程与电子技术(2016年5期)2016-11-02
成都信息工程大学学报(2016年6期)2016-06-01