利用手持激光点云的矿区自然林树干提取
2024-02-05 01:36王宏涛张成龙吴博文
激光与红外 2024年1期
王 果,王 成,王宏涛,张成龙,吴博文
(1.河南理工大学测绘与国土信息工程学院,河南 焦作 454000;2.河南工程学院土木工程学院,河南 郑州 451191;3.中国科学院遥感与数字地球研究所中国科学院数字地球重点实验室,北京 100094;4.北京控制工程研究所,北京 100190)
1 引 言
矿区植被在矿区生态系统中具有能源动力的作用,具备较强固碳速率和固碳潜力,在减缓区域气候变化、矿区水源涵养、水土保持、调节碳平衡等诸多方面发挥着越来愈重要的作用,在目前“碳中和”背景下,矿区植被立体监测和植被恢复已经成为矿山修复的重要内容[1]。
激光雷达(light detection and ranging,LiDAR)技术的不断发展,为矿区植被的立体监测提供了新的技术手段,架站式三维激光不仅可获取树木常规的胸径、树高等参数,还可以获取树干曲线等常规手段难以无损获得的参数,虽然在常规参数的提取[2]、树干曲线[3]、生物量估算[4]等方面有相应的研究,但测量效率及扫描数据的完整性是架站式三维激光技术的局限,单站测量过程中,距离激光扫描仪较远的树木信息会由于遮挡而丢失数据信息,尤其对于较茂密的幼年林中[5],多站测量过程中,由于人工靶标的拆除与扫描仪的迁移站耗费较多的时间,影响作业效率。移动式激光扫描在林业调查中充分发挥了数据采集高效的优势,相关研究主要集中在森林制图[6-7]、胸径提取[8]等,然而移动激光扫描设备特性决定了在林业调查中的局限,一方面,载具的通过性限制了移动激光扫描在林业调查中的应用,无法进入狭小、复杂的林地环境;另一方面,林间道路由于林木冠层遮挡,GNSS信号往往受到影响,进而对点云数据的融合精度造成影响[8]。
近年来,手持激光雷达不断发展,不仅具有极大的便携性,同时不受场地限制,能够进入几乎所有类型的区域进行扫描,在森林样地调查方面,手持式激光雷达的应用,正改变森林冠层结构立体监测的三维信息采集方式[9],为矿区植被的立体监测提供了新的研究视角,Ryding等[10]利用手持激光扫描对汉枫、榆树落叶林进行扫描,取得了与架站式激光雷达对比91 %的准确率,并对胸径和坐标进行了提取;Bauwens等[11]也对地面激光扫描和手持式激光扫描进行对比研究,表明手持式激光扫描可提供高效的森林参数,而且获取的树木胸径数据更加准确。现有研究多基于人工林数据采集及提取,人工林具有植被分布均匀、个体生长整齐、群体结构均匀合理等特点,然而矿区植被多为天然林,生长过程多受自然环境的影响,林分为异龄林,结构相对复杂,具有巨大的水源涵养、防控自然灾害的能力,生物多样性丰富,与人工林具有较大的差异,使得现有的树干识别方法针对复杂矿区环境自然林树干的适应性较差。
本文利用飞马SLAM100手持扫描仪对矿区真实环境下的自然林进行数据采集,利用同时定位与地图构建(Simultaneous Localization and Mapping,SLAM)点云,通过多尺度垂直度特征,对矿区自然林树干点云进行研究,为矿区植被立体监测和植被恢复等提供支撑。
2 矿区自然林树干点云提取方法
矿区天然林生长过程多受自然环境的影响,生长环境差异大、结构复杂,树干个体生长差异较大,树干生长发散,姿态多样,除此之外,林分多为异龄林,树木生长状况差异较大,树木主干大小不一,给树干点云的提取带来了一定的困难,但树干局部区域仍具有一定的垂直地面特性,为矿区树干点云的识别提供了提取的依据。为解决上述矿区自然林树干提取问题,本文提出了一种利用多尺度垂直度特征的矿区自然林树干点云识别方法,通过建立多尺度垂直度特征,主要包括点云滤波、非地面点垂直度计算、多尺度垂直度特征计算与树干识别、基于八叉树叶节点的连通性聚类,实现矿区自然林树干的提取。
2.1 矿区自然林点云滤波
文献[12]提出的点云布料模拟滤波算法思路创新、所需参数少且简单易用,本文为了滤除矿区自然林地面点对树干识别的影响,采用布料模拟法进行矿区自然林点云滤波,该方法的基本思想为:将获取的点云数据的进行高程反转,模拟的布料会因重力的作用,从高程反转后的点云表面移动和下降,通过分析模拟的布料与对应点云之间的作用,最终确定模拟的布料因重力作用,移动和下降后的位置,进而由点云的位置和高程与模拟布料之间的关系,实现矿区自然林点云滤波,其原理如图1所示[13],图中水平横线以下的实线所表示为实际测量得到的三维数据剖面图,水平横线为翻转轴,水平横线上方的实线为经过反转后的实测三维数据剖面图,虚线为布料模拟滤波最终的布料剖面图。
2.2 点云垂直度计算

(1)
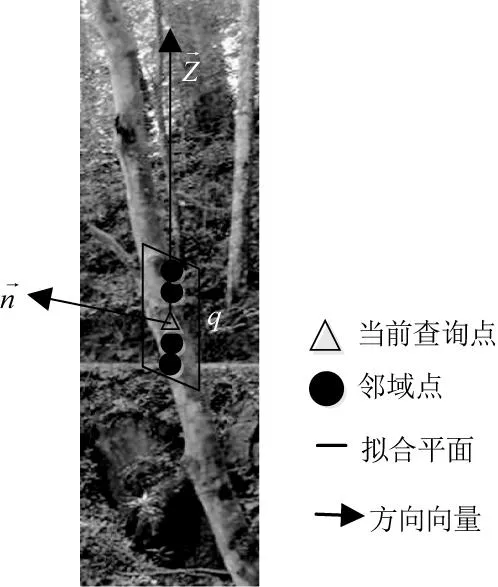
图2 树干局部垂直度示意图
其中,夹角θ的取值范围为[0°,180°],垂直度qv的取值范围为[0,1]。

2.3 多尺度垂直度特征计算与树干识别
矿区自然林树干大小不一,枝叶茂盛,树枝藤曼层叠丛生,如果采用单一尺度进行邻域计算,会造成提取较多的非树干点云,为此,本文采用多尺度进行自然林垂直度计算,通过选用不同尺度逐步计算点云的垂直度特征,并设置垂直度特征阈值,实现树干点云提取。首先,计算矿区自然林非地面点数据多尺度垂直度特征,假设不同尺度下手持激光扫描仪获得的激光点云为T,其坐标表示为Pi=(xi,yi,zi),i=1,…,NR,算法以激光点云集T中任意一点q为圆心,以尺度R为邻域半径,图3所示为不同尺度下点云的垂直度特征示意图。

图3 不同尺度下点云的垂直度特征

2.4 基于八叉树叶节点的连通性聚类
经过多尺度垂直度特征计算和树干识别,由于真实矿区环境及自然生长林的复杂性,依然包含非树干点云,根据树干点云具有空间上的连通性且具有一定的数量这一特征,采用基于八叉树的叶节点连通性聚类方法对识别的树干点云进行连通性分析。对初步识别的树干点云进行八叉树空间剖分,按照设定的最小剖分八叉树叶节点尺寸,将初步识别的树干点划分到不同的叶节点,然后,从任一叶节点开始搜索判断,如果该叶节点包含树干点云且,周围相邻的叶节点也包含树干点云,则表明他们属于同一个树干,进行合并,按照上述合并规则,对所有子节点进行搜索合并,最后,统计每个类别的数量,当某个类别包含的点数量大于设定的最小树干点数,则保留,否则将其视为非树干点进行剔除。
3 实验过程及结果分析
3.1 实验数据
选择黄河流域矿区河南省新安矿自然林进行实验,实验的矿区自然林中心地理坐标为34.81104605°N,112.10505921°E,海拔510.75419387 m。新安矿所在区域北邻黄河流域,四季分明,属暖温带大陆性季风气候,光照充足,树木和植被生长茂盛。整个实验自然林地势具有一定的缓坡坡度,最大高差为1.1 m。
选取实验区大小为20 m×20 m,选用飞马SLAM100手持式激光扫描仪进行数据采集,该设备配备有360°旋转云台,水平方向的视场角为200°、垂直方向的视场角为100°,内置三个摄像头(500万像素)和16个1级激光通道,具有120m的最大测程,每秒钟可扫描获得320 000点,可同步获取扫描对象的纹理,获得局部全景影像和被扫描场景的彩色点云,扫描点云的覆盖范围为270°×360°,实验区内树木密集,灌木丛生,在实验现场根据通行情况规划闭合路线,大约用时5 min完成数据采集,为去除实验区自然林周边的杂乱数据,将获取的点云数据进行手动裁剪,得到实验矿区自然林全彩色点云如图4所示。
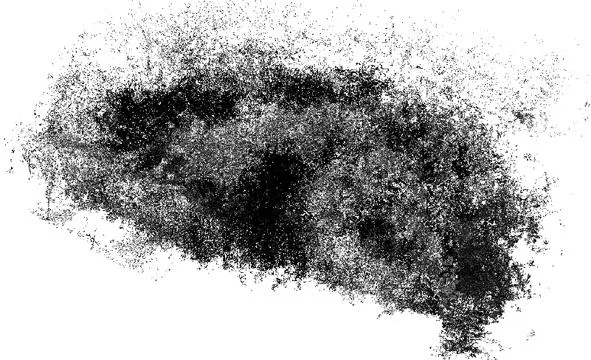
图4 实验矿区自然林的全彩色点云
从图4可以看出,实验数据自然林树木生长状况差异较大,枝叶茂盛,树木主干大小不一,树木主干提取干扰较多,此外,虽然获取了大量的实验点云,但同时值得指出的是外业数据采集由于受到自然林内杂草丛生、灌木缠绕等复杂情况的影响,实验人员通行较为困难,给数据采集和提取带来了一定的难度。
3.2 实验过程
为了排除地面点对树干提取的影响,对实验数据进行布料模拟滤波,设置布料分辨率为0.5 m,最大迭代次数500,分类的阈值为0.5,得到滤波后的实验区数据如图5所示。

图5 矿区实验自然林滤波结果
将滤波得到的实验林地设计四个邻域尺度(用R表示):0.04 m、0.10 m、0.13 m、0.15 m,分别依次进行垂直度计算,并设置垂直度阈值tv为0.8,得到树干识别结果分别如图6、图7、图8、图9所示。

图6 利用垂直度特征的自然林树干识别效果(R=0.04)

图7 利用垂直度特征的自然林树干识别效果(R=0.10)

图8 利用垂直度特征的自然林树干识别效果(R=0.13)

图9 利用垂直度特征的自然林树干识别效果(R=0.15)
设置八叉树最小叶节点的最小尺寸为0.1m,每个树干的最少点数为100,对初步识别的树干点云进行聚类,得到自然林树干点云的最终识别效果,如图10所示。

图10 矿区自然林树干点云提取结果
3.3 实验结果分析
由于扫描方式、扫描视角的差异,以及矿区环境下自然林生长的复杂性,导致现有针对机载和架站式扫描仪的树干点云识别方法并不适用于手持式扫描仪,此外,在复杂矿区环境下,缺少统一准则的实验数据,同时,自然林生长过程多受自然环境的影响,林分为异龄林,结构相对复杂,现有树干提取方法大都针对树干规则的人工林,缺少针对自然林树干提取方法,导致人工林的树干提取与矿区自然林树干提取算法之间不具有对比性,因此,本文通过目视的方式进行结果评定。
从图6到图9可以看出,通过逐步增大邻域半径,经过多尺度垂直度计算,实验矿区自然林树干被初步识别出来。图10结果显示,经过本文设计的矿区自然林树干点云提取方法,利用手持激光扫描仪能够实现复杂环境下自然林树干的提取,实现单个树干点云的分割,取得了较好的实验效果。
分析原因如下:(1)手持移动式激光扫描由于其便携性和机动灵活性,具有侧视的扫描视角,获得了丰富矿区自然林点云,避免了架站式激光扫描遮挡和迁站以及不同站间点云配准对树干提取的影响;(2)引入多尺度的垂直度计算,避免了单一尺度对自然生长的林木个体差异对提取结果的影响;(3)充分利用了自然林树木局部点云的垂直度特征;(4)设计的矿区自然林树干提取算法,使用了邻域计算、主成分分析、八叉树叶节点聚类等成熟算法和开源代码,提高了矿区天然林树干点云识别的稳定性。
4 结 论
针对矿区自然林树木三维定量刻画的需求,本文提出了一种利用手持激光扫描仪进行矿区自然林树干点云提取的方法,充分利用手持激光扫描仪的便携性和机动灵活性,进行矿区自然林点云数据获取,引入树干局部点云的垂直度特征在多尺度下进行计算,进而借助八叉树叶节点聚类进行自然林树干点云的提取。实测矿区自然林数据实验结果表明,本文方法能够实现矿区自然林树干的自动识别,为利用手持激光扫描仪开展矿区自然林树干提取提供了一种新的方法。
猜你喜欢
军事文摘(2021年16期)2021-11-05
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06
小猕猴学习画刊(2017年1期)2017-02-17
小猕猴学习画刊(2017年1期)2017-02-17
广东第二课堂·小学(2016年11期)2016-12-06
太空探索(2016年5期)2016-07-12
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
现代营销·经营版(2015年3期)2015-04-20
时代英语·高三(2014年5期)2014-08-26
现代营销·经营版(2013年5期)2013-05-14