机动目标跟踪的交互多模型泊松多伯努利混合滤波
2024-03-05 10:30陈壮壮宋骊平
系统工程与电子技术 2024年3期
陈壮壮, 宋骊平
(西安电子科技大学电子工程学院, 陕西 西安 710071)
0 引 言
目标跟踪技术一直是科学研究的热点之一,传统的多目标跟踪是一种典型的信息融合技术[1]。其通过对雷达、声纳等传感器获取的当前目标带噪声测量进行处理,进而估计目标的位置、速度、数量等相关状态信息,并进行下一时刻目标状态的预测[2-3]。这些跟踪技术建立在数据关联的基础之上,通过目标和量测之间的关联来实现目标的状态估计,例如多假设跟踪(multi-hypothesis tracking, MHT)算法[4],全局最近邻(global nearest neighbor, GNN)算法[5]和联合概率数据关联(joint probabilistic data association, JPDA)算法[6]等。
在20世纪90年代,Mahler将统计学中的数学概念引入到目标跟踪技术中,提出了随机有限集统计学理论(finite set statistics, FISST)[7-8],给多目标跟踪技术带来了更广阔的思路。随后一系列基于随机有限集(random finite set, RFS)的滤波算法被相继提出,例如基于一阶统计矩近似的概率假设密度[9](probability hypothesis density, PHD)、势PHD[10](cardinalized PHD, CPHD)和多目标多伯努利[11](multi-target multi-Bernoulli, MeMBer)等滤波算法。文献[12-13]提出了两种较为成熟的符合共轭先验分布的滤波算法,广义标签多伯努利(generalized labeled multi-Bernoulli, GLMB)滤波和泊松多伯努利混合(Poisson multi-Bernoulli mixture, PMBM)滤波。其中,与GLMB算法相比,PMBM算法具有更高的计算效率和跟踪精度[14-15]。该算法将多目标的概率密度分为泊松与多伯努利混合两个部分,泊松部分表示所有未被检测到的目标,多伯努利混合部分则用来处理所有的目标状态与量测之间的数据关联假设。该滤波器与其他基于随机集的滤波器相比,显示出了十分优越的性能[16]。
上述滤波器通常将目标状态建模为单一的基本运动模型。然而,随着跟踪环境的日益复杂,真实场景中目标通常会经历多种运动状态,称为目标机动[17]。单一运动模型已不足以描述其运动状态。近年来,对机动目标跟踪算法的研究得到了许多学者的关注。文献[18]采用最佳高斯拟合的方式,使得交互多模型(interacting multiple model, IMM)方法成功应用在高斯混合实现的PHD滤波器中。文献[19]对多模型PHD和CPHD进行改进,有效应对了其存在的粒子退化现象。文献[20-21]将跳变卡尔科夫系统应用于标签随机集,提出了适用于机动目标跟踪的标签多伯努利(Labeled multi-Bernoulli, LMB)和GLMB算法。文献[22]在δ-GLMB算法中应用IMM算法,完成了对机动目标的航迹跟踪。文献[23]对IMM算法进行改进,提出了时变交互多模型融合目标跟踪方法。
本文考虑到多机动场景的目标跟踪需要,提出了一种IMM-PMBM算法。该算法采用IMM方法完成模型间的信息交互,可以有效完成机动目标跟踪任务[24]。结合PMBM滤波器,所提算法具有较高的跟踪精度和计算效率。由于IMM方法基于卡尔曼滤波,不能直接应用于非高斯非线性环境中[25]。为了摆脱线性高斯假设的限制,给出了其序贯蒙特卡罗(sequential Monte Carlo, SMC)实现,使所提滤波器可以在非线性环境下工作[26-28]。所提IMM-SMC-PMBM滤波器利用粒子逼近目标状态的模型条件概率,在模型交互过程中进行重采样,以减少粒子合并和相互作用的影响。对比实验表明,所提算法可以有效完成多机动目标跟踪并具有较高的跟踪精度。
1 理论基础
1.1 RFS多目标跟踪
基于RFS的多目标跟踪中,通常使用两个独立的RFS来建模目标的状态和量测。假设k时刻存在Nk个目标和Mk个量测,则当前时刻的多目标状态RFS和量测RFS可分别用如下的Xk和Zk表示:
Xk={xk,1,xk,2,…,xk,Nk}∈F(X)
(1)
Zk={zk,1,zk,2,…,zk,Mk}∈F(Z)
(2)
式中:X和Z表示多目标的状态空间和量测空间;F(X)和F(Z)分别表示为对应的有限子集。
每一时刻的多目标状态集可用两个独立的部分构成,分别是存活目标状态集和新生目标状态集。k-1时刻的每个目标状态xk-1∈Xk-1可能以概率ps(xk-1)存活并且转移为下一时刻的新状态xk,也可能以概率1-ps(xk-1)消失。存活目标的RFS可表示为Sk|k-1(xk-1),新生目标RFS表示为Γk。则k时刻的多目标状态RFS表示为
(3)
类似的,k时刻获得的量测集可被分为两个部分,一部分是目标量测,另一部分则来自于杂波或虚警。对k时刻给定的多目标状态集Xk,每个目标可能以pd(xk)的检测概率被检测,或者以1-pd(xk)的概率漏检。将此时的目标量测集表示为伯努利RFSDk(x),则此时的量测RFSZk表示为
(4)
式中:Kk表示杂波或虚警RFS。
将上述运动模型和量测模型代入标准贝叶斯滤波方程,当给定k-1时刻的后验密度πk-1(Xk-1|Z1:k-1),则其预测和更新公式可表示为
πk|k-1(Xk|Z1:k-1)=
(5)
(6)
1.2 IMM算法
IMM算法的示意图如图1所示。
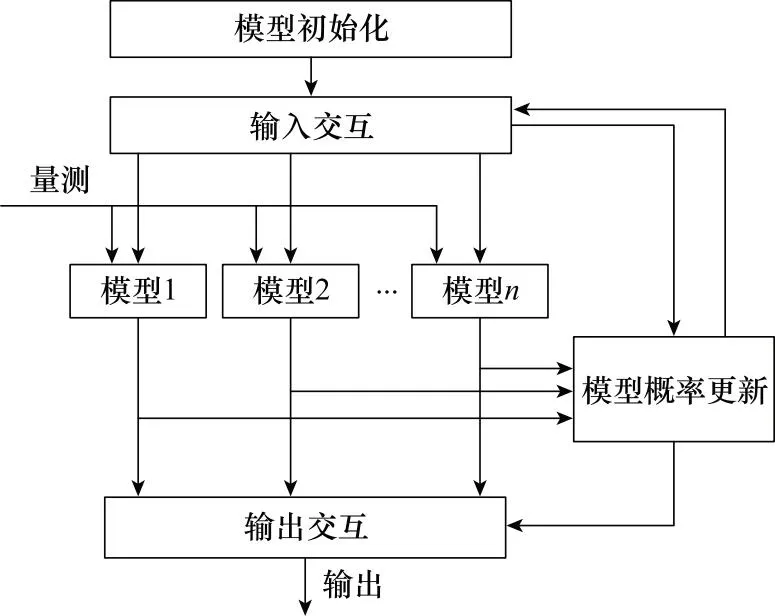
图1 IMM算法示意图Fig.1 Diagram of IMM algorithm
多机动目标跟踪场景下,不同时刻的运动状态可能由多个运动模型描述。滤波结果必须综合考虑不同模型的状态输出[29]。而IMM算法是解决这类问题的有效方法。IMM算法采用多个不同的模型对目标状态进行建模,在进行状态估计时每个模型都可能是当前时刻的最优模型。
IMM算法采用循环滤波方法,每个滤波器通过对多个模型进行信息交互从而获得新的状态估计和不同模型的模型概率。新的模型概率通过前一时刻的模型概率、模型似然和模型转移概率计算[30]。
1.3 PMBM滤波器

(7)
式中:fp(Xp)和fmbm(Xmbm)分别表示泊松部分和多伯努利混合部分的概率密度。
(8)
(9)
式中:v(·)是泊松强度;j是全局假设的索引;n表示所有潜在检测目标的数目;fj,i(X)表示全局假设j下对应潜在检测目标的伯努利密度;ωj,i是其对应的权重。fj,i(X)计算如下:
(10)
式中:rj,i和pj,i表示单个伯努利分量的存在概率和概率密度。
1.3.1 预测
PMBM滤波器的预测过程可以分为对泊松部分和对多伯努利混合的预测,其中对泊松部分的预测结果如下:
(11)
式中:λk(·)是新生目标的泊松强度;ps(·)表示存活概率;fk|k-1(x|·)是状态转移函数;vk-1(·)表示k-1时刻泊松后验强度。

(12)
(13)
(14)
1.3.2 更新
k时刻PMBM滤波器的更新后验密度可以表示为
(15)
为了公式的简洁,式(15)省略了时间索引,式(15)中L(Zp|Xp)和g(Zi|Xi)表示泊松部分和伯努利部分的似然函数。式(15)可以简写为
(16)
2 IMM-PMBM
文献[25]中提出的PMBM滤波器采用高斯混合实现,本文给出其SMC实现,使其可以应用于非线性场景中。引入IMM算法后目标的增广状态可表示如下:
(17)
其中,粒子状态通过
(18)

g(z|x)=N(z;hk(xτ),Rk)
(19)
式中:hk(·)表示量测函数;Rk表示量测噪声协方差。
下面结合IMM算法,给出所提滤波器的算法流程。所提算法与单模型PMBM滤波器的主要区别在于更新后的模型信息交互步骤,其他预测更新过程与单模型PMBM滤波器类似。
2.1 初始化
2.2 预 测
k-1时刻得到泊松强度表示为
(20)
(21)
(22)
对于存活目标RFS,有:
(23)
(24)

预测多伯努利混合部分的计算如下:
(25)
(26)
(27)
(28)
(29)
2.3 更 新
所提IMM-SMC-PMBM滤波器的更新步分为3个部分,分别是对未检测到的目标、首次检测到的目标以及存活目标的更新。
2.3.1 更新泊松部分
假设预测得到的泊松强度为
(30)
则更新后的泊松部分计算如下:
(31)
(32)

2.3.2 更新首次检测目标
对于量测z,建立新的假设,其参数计算如下:
(33)
(34)
(35)
(36)

2.3.3 更新存活目标
对于每个预测存活目标,首先为其建立漏检假设:
(37)
(38)
(39)
(40)
每个存活目标会与当前时刻的每个量测进行匹配从而形成新的假设,对于量测z,生成的假设计算如下:
(41)
(42)
(43)
(44)
另外,需要从所有全局假设中选取合适数量的假设来降低计算量,使用Murty算法可以很好地完成这一要求,具体的实现参见文献[13]。
2.4 修 剪
随着时间的推移,泊松分量中的粒子数和多伯努利混合中的分量数将大大增加,滤波效率将持续下降。因此,有必要对泊松分量和多伯努利混合分量进行修剪。首先,设置两个阈值,分别对应泊松分量和伯努利分量。将泊松分量中的权值低于阈值的粒子和多伯努利混合项中权值低于阈值的分量剪去。
2.5 状态估计
遍历全局假设并选取权值最大的假设,记为
(45)
然后,遍历其中所有的伯努利项并选取存在概率大于给定门限的部分,计算其加权和作为最终估计结果。
2.6 交互过程
所提滤波器中的多模型交互过程和标准IMM滤波器类似。对每个模型的输出进行加权和融合,以提高精度,使结果更符合真实场景。交互过程的具体推导如下。
k-1时刻的后验密度用粒子可表示为
fk-1(xk-1,τk-1|Z1:k-1)=
(46)

根据最优贝叶斯估计[31],模型τk的概率密度函数表示为
(47)
通过全概率公式可以得到:
(48)
对式(48)两边同除以pk(τk|Zk)可得到:
pk(x|τk,Zk)=
(49)

(50)
将式(50)代入式(47)和式(49),可以得到如下结果:
pk(τk|Zk)=
(51)
(52)
由于τk-1∈A,因此式(46)可以改写为如下形式:
fk-1(xk-1,τk-1|Z1:k-1)=
(53)
对式(53)进行归一化:
(54)

(55)
类似的,可以通过后验密度获得模型概率密度。则得到如下方程:
(56)
(57)
那么,目标的模型条件后验密度可以计算如下:
fk(xk|τk,Z1:k)=
(58)
则由式(58)可以知道,在不同模型下,可以通过粒子近似后验概率密度来实现输入的相互作用和融合。由于粒子滤波会导致粒子合并,降低粒子多样性,所以重采样步骤不是在更新之后,而是设置在式(58)的相互作用之后进行。
(59)
则重采样后最终的目标后验密度为
(60)
由于新生目标不需要模型转换过程,输入交互作用和重采样只需对存活目标进行。在每个时间步进行重采样,使每次预测前的粒子数量保持固定。
3 仿真实验与结果分析
为了验证本文所提IMM-SMC-PMBM算法在机动和非线性场景下跟踪的有效性,本节设置了非线性环境下与IMM-SMC-PHD滤波器的对比实验,采用势估计和广义最优子模式分配(generalised optimal sub-pattem assignment, GOSPA)[32]作为性能评价指标。

xk=Fxk-1+wk
(61)
(62)
式中:F表示状态转移矩阵;vk表示量测噪声,其协方差为Rk=diag([0.25π/1 801])。本场景下目标机动模型包含了1个匀速直线(constant velocity, CV)模型和2个转弯(constant turn, CT)运动模型,分别为
式中:T=1 s表示采样间隔;ω=9°/s表示目标每秒顺时针旋转9°。F3和F2有着相同的形式,但取ω=-9°/s表示目标逆时针旋转。wk表示过程噪声,符合零均值高斯分布,其协方差为


图2 真实运动轨迹Fig.2 True motion trajectory
目标的真实运动状态如表1所示,目标的真实运动轨迹如图2所示,其x和y方向上的真实轨迹和量测如图3所示。图3中,蓝色星号表示量测,红色线条表示真实运动轨迹。
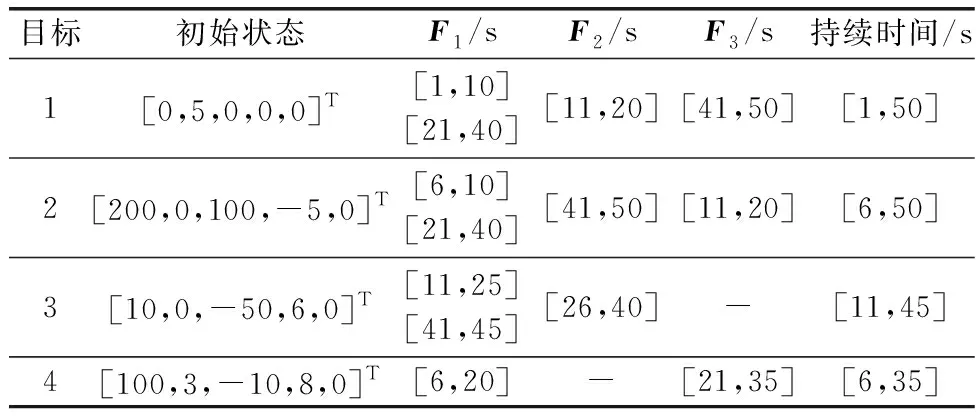
表1 目标真实运动状态Table 1 Targets real motion state
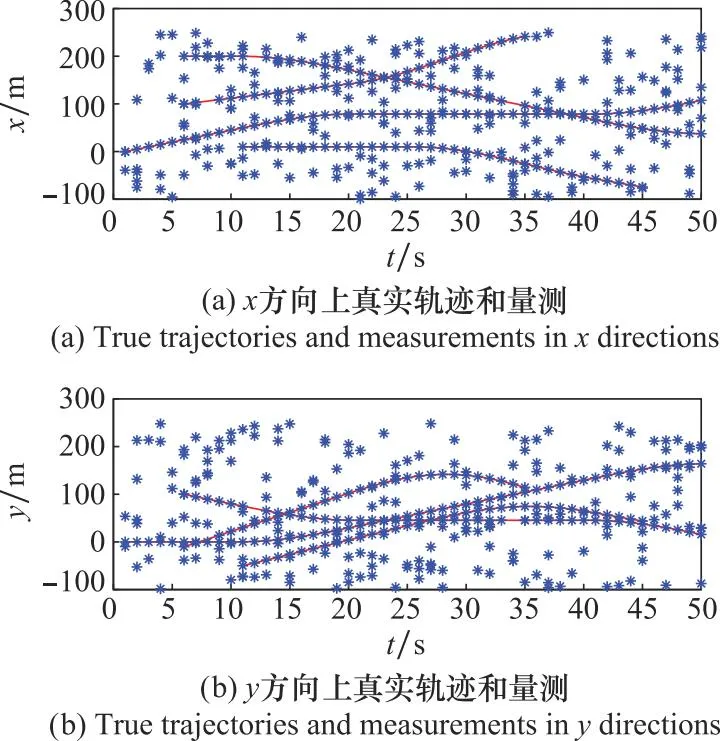
图3 x和y方向上真实轨迹和量测Fig.3 True trajectories and measurements in x and y directions
模型间的概率转移矩阵设置为
3个模型的初始概率设置为1/3。

所提IMM-SMC-PMBM滤波器单次蒙特卡罗下的跟踪结果如图4所示。图4中,蓝色星号表示杂波,用不同颜色表示出跟踪的航迹。实验在100次蒙特卡罗实验的情况下比较了所提滤波器和IMM-SMC-PHD滤波器的跟踪性能。同时,为了说明所提滤波器在机动场景下的跟踪可靠性,给出了不使用IMM方法的PMBM滤波器的跟踪结果。上述跟踪的势估计结果如图5所示。由于PMBM滤波器综合考虑了所有数据关联,对泊松分量和MBM分量分别处理,对概率密度函数的参数进行传播,而PHD滤波器只传播多目标概率密度的一阶矩。因此,PMBM滤波器比PHD滤波器具有更好的跟踪性能。从图5可以看出,单一模型的PMBM滤波器难以跟踪机动目标。与单模型PMBM滤波器相比,所提出的IMM-SMC-PMBM滤波器具有更好的跟踪性能。

图4 跟踪结果Fig.4 Tracking results
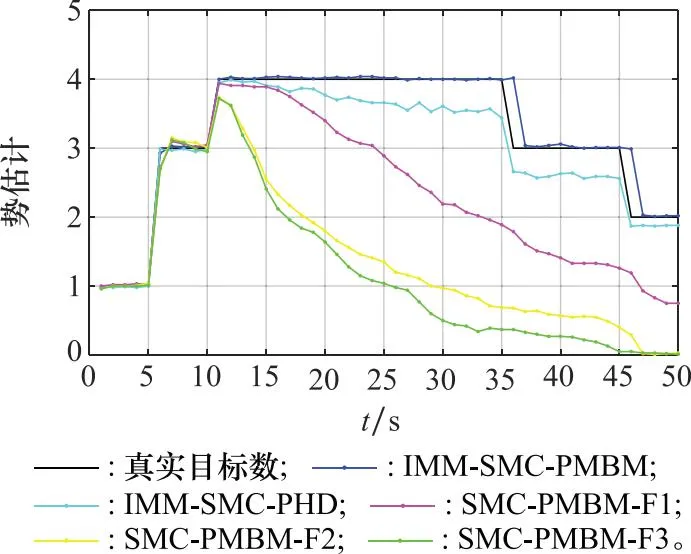
图5 势估计Fig.5 Cardinality estimates
检测概率为pd=0.98时的GOSPA误差及其分解误差如图6所示,包括位置误差(location error, LE),漏检误差(miss target error, MTE)和误检误差(false target eror, FTE)。仿真结果表明,IMM-SMC-PMBM滤波器对比IMM-SMC-PHD滤波器具有更优异的跟踪性能,特别是在GOSPA误差和误检误差方面。注意到,FTE在时间步36和46处变大,这是由于PMBM滤波器采用了多假设的思想来跟踪,当目标消失时,包含单一目标假设的权值不会立即改变,存在延迟的情况。对比实验也显示了所提算法比单模型PMBM滤波器有更好的跟踪性能。本文还进一步研究了所提滤波器在较低检测概率情形下的稳定性,实验结果如表2所示。结果表明,所提滤波器表现良好并且在低检测概率时具有更好的鲁棒性。而IMM-SMC-PHD滤波器在低检测概率情况下误差较大,有可能无法有效完成跟踪任务。

图6 pd=0.98时误差比较Fig.6 Comparisons of errors under pd=0.98

表2 不同检测概率下的平均误差Table 2 Average errors under different detection probabilities
图7给出了所提滤波器在滤波过程中的模型概率演化过程。注意到,模型信息交互对泊松和多伯努利混合部分都进行,但是由于泊松部分代表尚未检测到的目标。因此,只通过多伯努利混合部分计算模型概率。模型概率通过计算带有最高权重的假设获得。结果表明在跟踪过程中,IMM方法的模型概率变化符合表1所展示的真实场景,使得IMM方法可以动态的适应目标运动。因此,所提滤波器在目标运动符合多个不同模型时均有较好的表现。
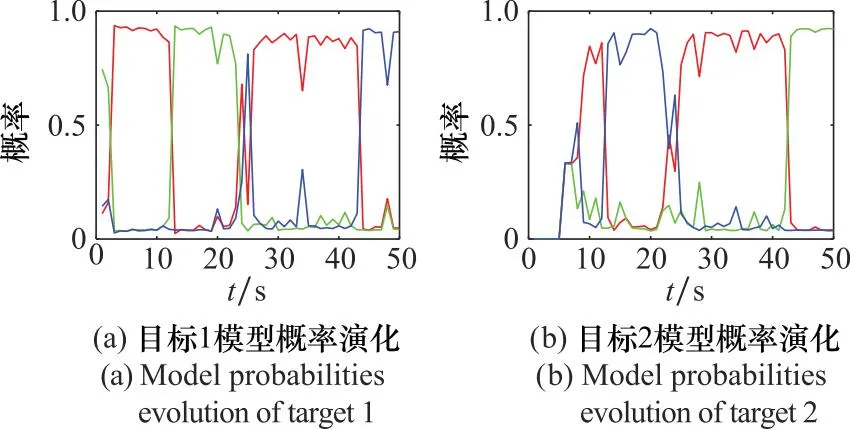
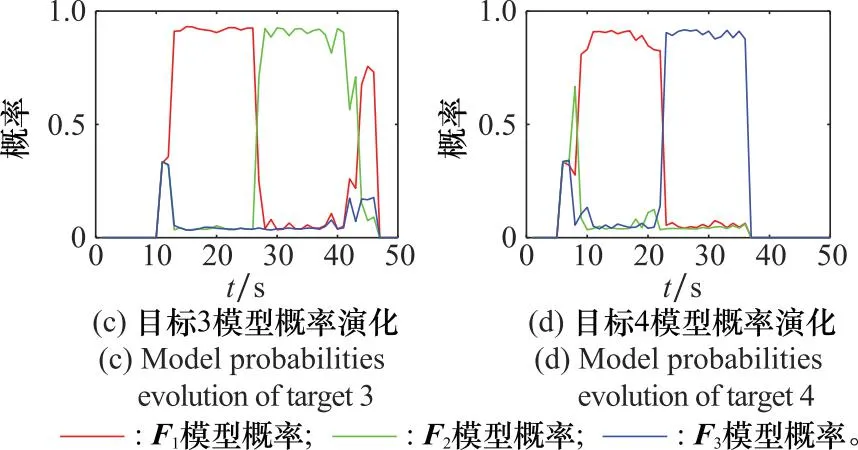
图7 模型概率演化Fig.7 Model probabilities evolutions
4 结束语
本文提出了一种IMM-SMC-PMBM滤波算法。考虑到多个模型间的信息交互,在PMBM滤波器中采用IMM算法跟踪多机动目标,同时对所提滤波器给出其序贯SMC实现,使得算法可以较好地适应非线性环境。仿真实验结果表明,所提IMM-SMC-PMBM滤波器相比IMM-SMC-PHD滤波器有更好的跟踪性能。所提滤波器在GOSPA误差和势估计方面表现良好,并且在检测概率较低的情形下具有更好的滤波稳定性。未来的研究将考虑机动目标的扩展形状,实现多机动扩展目标跟踪。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
数学物理学报(2020年6期)2021-01-14
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
系统工程与电子技术(2016年7期)2016-08-21
发明与创新(2016年5期)2016-08-21
课程教育研究·学法教法研究(2016年7期)2016-04-26
火控雷达技术(2016年2期)2016-02-06
数学年刊A辑(中文版)(2015年2期)2015-10-30
数学物理学报(2015年4期)2015-02-28