基于事件触发采样的无尾翼飞机自适应容错姿态控制
2024-03-05 10:22禹志龙李颖晖裴彬彬段效聪
系统工程与电子技术 2024年3期
禹志龙, 李颖晖,*, 裴彬彬, 段效聪, 张 喆
(1. 空军工程大学航空工程学院, 陕西 西安 710038; 2. 中国人民解放军94657部队,江西 九江 332024; 3. 中国飞行试验研究院, 陕西 西安 710089)
0 引 言
无尾飞翼布局飞机由于采用翼身融合的一体化设计,使其在气动效率、隐身性能、续航时间、载荷分布等方面相较传统布局飞机有着明显的优势,成为世界各国未来飞行器发展的重点方向之一,也是未来隐身轰炸机、无人攻击机、长时间留空侦察机等的理想选择[1-2]。然而,由于取消了水平和垂直尾翼,导致飞行器的纵向静稳定性弱、横向中性稳定甚至静不稳定[3];同时,飞翼布局飞机的展弦比大、机身短,使得其操纵效能不足,通常需要多个控制舵面之间的协同配合,才能实现正常的飞行,这将导致飞机横、纵向动力学之间的严重耦合,上述的所有问题将给控制系统的设计带来困难。
执行器失效是飞行过程中最为常见的故障之一,为了提升系统的安全性与可靠性,系统的容错能力也是需要考虑的问题[4]。目前,存在的容错控制方法主要可以分为两大类,即主动容错和被动容错。被动容错主要基于鲁棒控制的设计理念,能够针对特定的故障类型采用固定的控制器结构。文献[5]中基于无尾翼飞机的动力学特性提出一种多时间尺度的滑模容错控制方法。文献[6]中将执行器故障视为不确定项,并基于滑模扰动观测器设计了一种鲁棒容错控制方法。但是,被动容错控制方法的容错能力有限,当故障类型或故障程度超出预定的范围后,系统的性能将无法得到保证。主动容错主要是基于系统的故障信息主动对模型或者控制器进行重构。文献[7]针对无尾翼飞机执行器故障,构建了一个增量故障观测器来估计执行器的故障信息,在此基础上提出一种最优容错控制方法。文献[8]提出一种具有预定时间收敛的自适应容错控制方法实现了无尾翼飞机在外部扰动与执行器故障条件下的姿态控制。
值得注意的是,上述文献中的控制方法都是基于连续的周期性采样设计的,尤其对于无尾翼飞机这种多舵面操纵的飞机,将不可避免地造成总线传输信道资源的占用,甚至造成网络阻塞,同时增加舵机损耗。事件触发控制作为一种新的非周期控制策略,由于能够适用于有资源约束的系统,如通信带宽有限、能量资源受限等,而受到越来越多的关注[9-14]。文献[15]对事件触发采样与周期性进行了对比,结果显示事件触发采样在提高通信效率的同时,保证了系统控制性能。文献[16]针对具有未知控制参数的非线性系统,提出一种参数估计器与控制器同时触发的事件触发控制方法,并实现了跟踪误差的渐进收敛。此外,事件触发控制也被广泛应用到实际系统的控制中。文献[17]针对有限通信条件下航天器姿态跟踪控制问题,提出一种基于事件触发的具有预设性能的自适应容错控制;文献[18]研究了柔性吸气式高超声速飞行器的跟踪控制问题,结合预设性能控制与自适应控制,提出一种基于事件触发的自适应预设性能控制方法;文献[19]提出一种具有事件触发输入的无人水面船舶路径跟踪控制算法。目前,基于事件触发采样的容错飞行控制的相关研究仍然较少,值得进一步的扩展与应用。
基于上述分析,针对无尾翼飞机在存在外部扰动、参数不确定、执行器故障等条件下的控制问题,设计了一种在控制器-执行器通道间采用非周期事件触发采样的自适应容错控制方法。通过稳定性分析,严格证明了所提控制方法的可行性,最后,通过对比仿真验证了控制方法的有效性与优越性。
1 飞翼无人机模型
1.1 6自由度无尾翼飞机模型
考虑一架具有“双W”布局的飞翼无人机,其舵面配置如图1所示。飞翼无人机由四组舵面构成,包括3组升降副翼(δl1,δr1,δl2,δr2,δl3,δr3)和1组开裂式阻力方向舵(δl4,δr4)。

图1 无尾翼飞机舵面结构配置Fig.1 Configuration of rudder structure of the tailless aircraft
飞翼无人机的6自由度模型表示如下[20-21]:
(1)
(2)
(3)
式中:V,χ,γ表示飞机的空速、方位角、航迹角;μ,α,β为飞机的速度滚转角、迎角、侧滑角;p,q,r表示飞机的滚转角速度、俯仰角速度、偏航角速度;FX,FY,FZ表示飞机沿着本体系的X,Y,Z轴方向的合外力,并且能够通过相应轴向的加速度计准确测得;m是飞机的质量;g=[0,0,gz]T表示在地球坐标系下的重力加速度;J为飞机的转动惯量;Ch/b,Ch/e表示从本体系到航迹坐标系的方向余弦矩阵以及从地球坐标系到航迹坐标系的方向余弦矩阵;M为飞机的合外力矩,M=Ma+Mδ,其中Mδ表示由于舵面偏转产生的控制力矩,可以表示为
(4)

考虑如下执行器时变故障模型[22-25]:
(5)

由于网络的通信容量和带宽是有限的,从系统的角度而言有必要合理的利用总线的带宽。因此,本文在控制器-执行器通道之间引入一系列事件触发机制来有效降低总线的通信压力。定义如下函数来描述事件触发的信号:
(6)
(7)

定义:
根据式(6)和式(7), 在时间区间[ti,k,ti,k+1)内,有下式成立:
因此,对于所有的k=0,1,2,…,有
(8)
根据式(8)可以得到|λi|≤1,结合λi的定义,有

(9)
根据式(9),有
(10)
式中:G(t)=diag{gl1(t),gl2(t),…,gr4(t)}∈R8×8;Π(t)=[Πl1(t),Πl2(t),…,Πr4(t)]T∈R8;其中,
1.2 无尾翼飞机姿态控制模型
考虑模型不确定(ΔJ,ΔCl, ΔCm,ΔCn)以及外部扰动d的影响,根据式(2),有
(11)
式中:Ω=[μ,α,β]T表示飞机的姿态角;fΩ和gΩ表示为
根据式(3),有
(12)

将式(4)代入式(12),并结合式(10)可得
(13)
式中:fw和dw表示为

(14)
1.3 几个关键假设与引理
假设 1总的不确定量dω有界。满足|dωi|≤Di(i=1,2,3),Di是一个未知正常数。
假设 2存在一个常数ρ使得λmin(BΛBT)≥ρ>0,其中λmin(·)表示矩阵最小特征值。
外部扰动d主要由外部气流变化引起,通常是有界的,惯量的不确定部分ΔJ主要是由燃料消耗和载荷的变化引起微小变化量,气动参数的不确定量ΔC*主要源于模型的不确定,也是一个小的变化量。因此,假设1是合理的。假设2用来确保无尾翼飞机在发生执行器故障时的可控性,即最多5个舵面同时完全失效。如果假设2无法满足,控制系统将变为欠驱动系统。由于B为控制效能矩阵, 因此BBT是正定的。可以进一步推导出λmin((BΛBT)[BBT]-1)≥ρ0>0。
引理 1[26]对于任意的x∈R和给定常数ξ>0,下列不等式成立:
(15)
引理 2[27]对于任意的x∈R和给定常数ε>0,下列不等式成立:
(16)
2 基于事件触发的自适应容错控制器设计
本文在控制器-执行器通道之间引入事件触发机制来有效降低总线的通信压力,所提出控制方法的结构如图2所示。
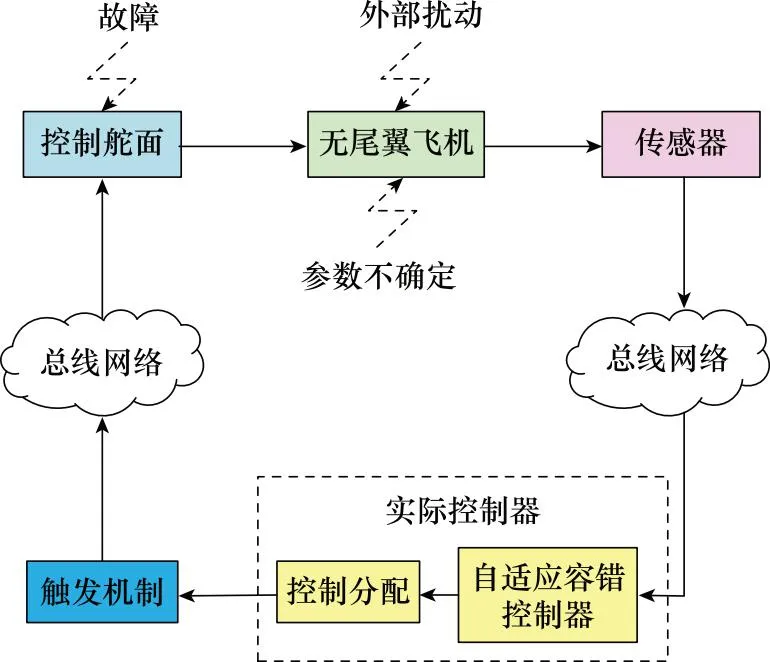
图2 本文控制方法的结构图Fig.2 Structure of the proposed control scheme
本文提出的自适应容错控制器将基于反步控制理论进行设计,主要过程将分成以下两步。

(17)
式中:Ωd=[Ωdμ,Ωdα,Ωdβ]T为无尾翼飞机的姿态参考信号。
对式(13)求导可得
(18)
因此,虚拟控制律ωc=[ωc1,ωc2,ωc3]T可以设计为
(19)

(20)
考虑如下Lyapunov函数:
(21)
对式(21)求导,并结合式(18)~式(20)可得
(22)
步骤 2根据假设2, 可以定义
其中:ρ0表示矩阵BΛBT[BBT]-1的最小特征值。
考虑如下Lyapunov函数:
(23)

对式(23)求导,可得
(24)
设计如下中间控制α=[α1,α2,α3]T:
(25)

根据引理2,如下不等式成立:
(26)
将式(24)和式(25)代入式(23),有
(27)
(28)
式中:
(29)
式中:G0=diag(g01,g01,…,g08),g0i=1+ci,1;B+=BT[BBT]-1表示控制效能矩阵B的伪逆;ξ>0为待设计的控制器参数。

(30)
(31)
式中:σ1>0、σ2>0为待设计的控制器参数。

(32)
(33)
将式(28)~式(33)代入式(27)中,可得
(34)
3 系统稳定性分析
定理 1在假设1和假设2的条件下,对于存在外部、参数不确定及时变执行器故障的无尾翼飞机姿态控制系统式(14),如果控制器-执行器通道之间的事件触发机设计如式(6)和式(7)所示,虚拟控制律设计如式(19)所示,中间控制律设计如式(25)所示,实际控制律设计如式(28)所示,自适应律设计如式(30)和(31)所示,选取合适的控制器参数可以得到:
(1) 无尾翼飞机姿态控制系统所有信号有界,并且最终将收敛至原点附近的残差集内。
(2) 控制器-执行器通道之间的事件触发采样无Zeno现象的发生。
为证明定理 1,考虑如下Lyapunov函数:
L=L1+L2
(35)
对式(22)求导,并将式(25)和(33)代入,可得:
(36)
利用Young’s不等式,有
(37)
将式(36)代入式(35),有:
(38)
式中:
定义如下紧集:

接下来将证明本文所设计的基于事件触发采样的控制方法不会发生Zeno现象,即最小采样时间Δtk=tk+1-tk>0。
(39)
(40)
因此,可得
(41)

相较于文献[5-8]中针对无尾翼飞机所提出的容错控制方法,本文在控制器-执行器通道之间引入事件触发机制,大大降低了控制器与执行器之间的通信频率,降低了机载总线的通信压力,节约了系统的计算资源。
选择合适的控制器参数对于提升姿态控制的精度和性能至关重要,在此给出关于控制器参数选取的建议。① 控制增益ki1、ki2是决定姿态控制系统收敛速率的关键参数,大的控制增益可以加快系统的收敛速度。然而,过大的控制增益将导致输入饱和问题。② 通过增大参数η1、η2及减小参数σ1、σ2、ε、ξ能够提升系统的稳态性能。③ 减小事件触发机制的参数ci,1和ci,2能够提升姿态控制系统的精度,但会增大控制信号更新的频率,同时增大控制系统的计算量与网络通信压力。因此,在选取ci,1和ci,2时需要在系统控制性能与通信压力之间进行权衡,选取一个适当的ci,1和ci,2值既可以防止系统性能下降,又能减轻通信负担。
4 仿真验证与分析

(42)

无尾翼飞机初始状态:V=25 m/s,χ=3°,γ=1°,Ω=[1,5,1]T,ω=[0,0,0]T°/s。控制舵面的幅值限制设定为{-25°≤δli,δri≤25°,i=1,2,3},{0°≤δl4,δr4≤40°}。采样时间T=0.01 s,控制器参数选取为k11=12,k12=2.5,k21=10,k22=1.5,η1=5,η2=10,σ1=0.5,σ2=0.5,ε=0.01,ξ=0.01,cl1,1=cr1,1=0.05,cl2,1=cr2,1=0.3,cl3,1=cr3,1=0.3,cl4,1=cr4,1=0.3,ci2=0.01。

仿真结果如图3~图7及表1所示。

图3 不同控制方法下无尾翼飞机的姿态及跟踪误差Fig.3 Attitude and its tracking errors of tailless aircraft with different control methods

图4 不同控制方法下无尾翼飞机的角速度及跟踪误差Fig.4 Angular velocity and its tracking errors of tailless aircraft with different control methods

图5 无尾翼飞机各舵面的偏转曲线Fig.5 Each elevon deflection trajectories of tailless aircraft

图6 不同控制舵面触发事件的时间间隔Fig.6 Time interval of triggering events for different control rudders
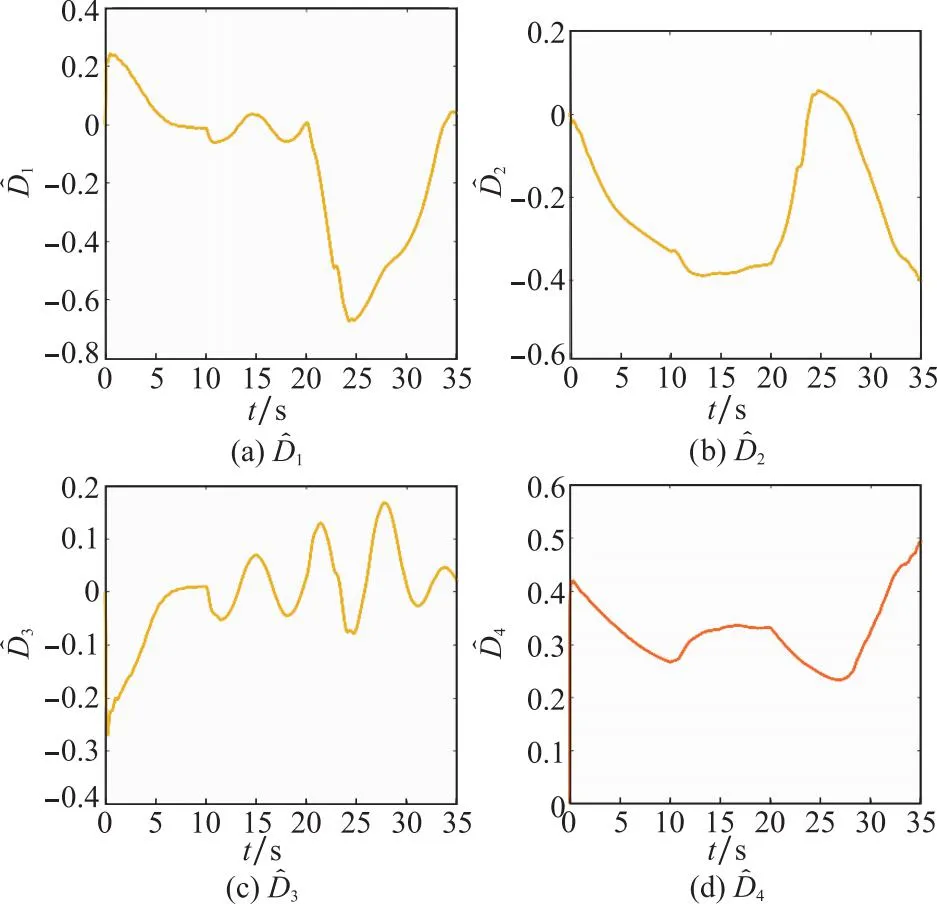
图7 自适应参数的时间响应曲线Fig.7 Time response of adaptive parameters

表1 3种不同控制方法的性能评价Table 1 Performance evaluation for three different control methods

5 结 论
本文针对无尾翼飞机在存在外部扰动、参数不确定、执行器故障及通信带宽受限条件下的姿态控制问题,提出了一种基于事件触发的自适应容错控制方法,通过稳定性分析证明了其可行性。通过对比数值仿真表明:
(1) 本文提出的容错控制方法能够实现无尾翼飞机在外部扰动、参数不确定、执行器故障及通信带宽受限条件下姿态的跟踪控制。
(2) 与传统的控制器相比,本文设计的控制方法具有更好的控制性能。
(3) 与周期性时间采样方法相比,本文设计的基于事件触发采样的控制方法能够减少控制器-执行器通道之间约90.6%的通信频次,同时保证系统的跟踪性能。
猜你喜欢
装备环境工程(2022年9期)2022-10-13
兵器装备工程学报(2021年12期)2022-01-11
湖北工业职业技术学院学报(2021年1期)2021-04-01
名车志(2020年10期)2020-10-27
民用飞机设计与研究(2020年1期)2020-05-21
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
测控技术(2018年12期)2018-11-25
制造技术与机床(2017年9期)2017-11-27
产品可靠性报告(2017年6期)2017-09-05