基于图像处理的零件尺寸测量研究
2011-08-07 07:53马艳娥张波涛高磊王红红
电子测试 2011年8期
马艳娥,张波涛,高磊,王红红
(中北大学 信息探测与处理技术研究所 太原 030051)
0 引言
图像测量是一种采用 CCD(电荷耦合器件)进行摄像测量的新型光电测量技术,它是将 CCD 器件与光学仪器联用,应用于测量领域而形成的[1]。图像测量技术是以现代光学为基础,融计算机图像学、信息处理、计算机视觉、光电子学等科学技术为一体的现代测量技术,它把被测对象的图像当作检测和传递信息的手段,从中提取有用的信号来获得待测的参数。本文提出了一种基于图像处理的非接触方案,力求把非接触测量手段与零件尺寸测量问题更有效地结合起来。
1 基于图像处理的零件尺寸测量技术研究
1.1 超分辨率图像重构技术
超分辨率(SR)是根据图像序列和成像模型去除由成像系统造成的模糊(散焦模糊、运动模糊和非理想采样等)以及复原超出光学系统衍射极限之外的空间频率信息,为使图像获得更多的细节和信息,同时还能消除附加噪声以及由有限检测尺寸和光学元件产生的模糊[2-3]。本文应用超分辨率图像重构方法来提高原始图像的分辨率,需要进行图像的插值、配准、重构 3个步骤的工作。
将图像中感兴趣的那些点准确或近似准确地对应起来的过程称为配准。图像配准可定位为两相邻图像在空间关于像素亮度值(灰度图像中表示为灰度值)的一种映射,即关于亮度值的一种几何坐标关系变换。本文采用基于块的方法,在空间域中利用图像的灰度值来度量 2 帧图像之间的运动,最优标准使用绝对和差值(SAD)DSA,第k帧和第 l帧图像的 DSA为:


1.2 亚像素级边缘检测
在精度要求不是太高的情况下,采用最小二乘线性回归直线边缘亚像素定位算法不但可以获得满意的定位精度,而且可以大大提高定位速度。在不要求速度的情况下,可以采用空间矩亚像素定位算法来获取较高的定位精度[4-5]。本文使用最小二乘线性回归把二维的边缘拟合降为一维边缘定位,从而使直线边缘定位达到亚像素级精度的算法。在线性滤波边缘检测方法中,Canny最优算子最具代表性,也是检测阶跃型边缘效果较好的算子之一,它比其他算子的去噪能力都要强[6]。其实质是用高斯滤波器来对图像滤波,以去除图像中的噪声。首先,选用 Canny算子作为整像素级边缘定位函数,进行整像素级边缘提取;然后,使用最小二乘线性回归再进行边缘亚像素定位。
1.3 CCD摄像机标定
对零件的尺寸进行测量[7],只需要标定出图像中两像素点对应的实际物理距离即可。因此,通过实验的办法,利用优化技术回归出一个标定图像中两像素间对应的实际物理距离的方程,把相机的一些外部和内部参数都系数化到方程中[8]。
根据测量需要,设回归方程 :

式中 Y 表示两像素点之间对应的实际物理距离, b1为拍摄时的物距(单位为mm), b2为图片中像素点距离中心像素的距离(单位为 pixel)。
根据以上原理,分别用40,60,80,100,120,140,160,180,200,220,240,260,280,300,320,340 这 15个拍摄距离进行图像采样,获得图像的分辨率。随后,通过平均的办法得到每幅图片中心部位到边缘部位的两像素点间对应的实际物理距离。其中,中心部位到边缘部位的数据采集利用等距间隔采集的方法,依次采集 10个点。因此,这15幅图片一共可以得到相应的150组数据,然后利用这些数据进行多元线性回归,得到方程:

由于水库涵洞未修建检修闸门,工作闸门长期处于工作状态,检修比较困难,因此本工程主要是在涵洞进口处新建一座闸井、涵洞及坝体连接段。

式中 L 为进行测量时相机镜头到被测量工件的实际距离, N 为图片中像素点距离图片中心像素的距离。
为了检测标定结果的精度,选定了两块标准量块进行实验验证,量块的尺寸分别为(25±0.00040)mm,(50±0.00040)mm。首先找到要求的具体位置,根据上面回归出来的公式进行像素点标定结果的具体计算,然后累加出两边缘间对应的量块测量距离,如表1所示。

表1 检验标定结果精度的数据表格
利用优化回归建立模型进行标定,操作简单,标定精度较高,避免了现有标定过程的烦琐。
2 实验分析及结果
由于对图像进行了超分辨率重构,因此标定的公式(5)就不再适用,需要对其进行相应的修改。由于重构后的图像大小为原始图像的2倍,因此标定公式可以表示成:

然后代入式(6)得到:




图1 经过挑选后的4幅低分辨率图像
经过简单的二次插值之后得到的图像,如图2所示,通过对比,可以明显地发现经过超分辨率重构之后的图像要比经过简单插值之后的图像更加清晰,效果更好。用重构后的图像进行边缘检测以及计算将得到更高精度的结果。
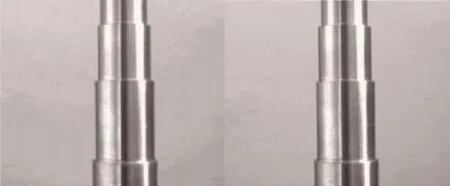
图2 LR图像重构之后的效果比较
从采集到的图像中截取一段需要的轴轮廓图, 如图3所示。 从图中可以看到轴的两个边界的真实情况。通过编制的程序把采集的原始图像变成灰度图像,然后显示出其对应的灰度数据。其中数据值大的部分表示亮区域,数据值小的部分表示暗区域。从数据分布可以得出,横坐标中从最大值到最小值之间的这段表示边缘所在区域。这样,只是大致地定位了边缘区域,接着需要利用最小二乘线性回归亚像素边缘检测方法对边缘进行高精度的检测与定位。

图3 图像的实际边缘情况
用于计算第n个和 1 + n 个点对应的标定值以及该点距离相机的距离的表达式为

通过上述过程的计算便得到了最后的测量结果,其与初始测量值的精度对比情况如表 2所示。

表2 测量值的数据对比
忽略畸变的影响,按照小孔成像,有关系式:像元尺寸/实际长度=焦距/物距,即当物距为焦距的0.6倍左右可达到测量结果中给出的精度0.006 mm 左右。结果表明图像测量的精度是稳定的,而且该测量适用于微小尺寸的测量,在测量时可在镜头前安装放大镜等可起到放大作用的相关观察设备。
3 结论
因测量硬件技术和成本的限制,拍摄的零件图像清晰度往往不能满足尺寸测量的要求。为了提高零件图像的清晰度,满足尺寸测量精度的要求,提出根据超分辨率图像重构理论,利用拍摄的零件图像信息,通过重构获得清晰的图像,准确确定零件边缘在图像中的位置和提高测量精度。通过实验数据的对比,发现利用该系统进行中小尺寸的轴类零件测量的精度比较高。
[1]时小军,张小辉,胡仲翔,等.基于机器视觉的平磨表面粗糙度检测[J].中国激光,2008(35):320-323.
[2]潘兵,谢惠民.数字图像相关中基于位移场局部最小二乘拟合的全场应变测量[J].光学学报,2007,27(11):1980-1986.
[3]雷鸣,张广军.基于互相关的图像匹配亚像素定位[J].光电工程,2008,35(5):108 -113.
[4]杨敏,叶邦彦,牟丽.机械零件图像中直线边缘亚像素定位方法[J].华南理工大学学报,2003,31(12):30-33.
[5]A.Feuer.Superresolution restoration of an image sequence:adaptive filtering approach[J].IEEE.Trans.IP,1999,8(3):387-395.
[6]Reinhard Klette. Robot Vision[M]. Changsha: Hunan Literature and Art Publishing House, 2001.
[7]李俊伟,邓文怡,刘力双.一种线阵CCD检测系统的调整和标定方法[J].现代电子技术,2009(11):141-146.
[8]孙双花.视觉测量关键技术及在自动检测中的应用[J].天津大学学报,2007(13):21-25.
猜你喜欢
哈尔滨工业大学学报(2022年5期)2022-04-19
摄影世界(2022年1期)2022-01-21
汽车维修与保养(2020年11期)2020-06-09
知识经济·中国直销(2018年12期)2018-12-29
商周刊(2017年6期)2017-08-22
中国惯性技术学报(2017年1期)2017-06-09
通信产业报(2016年44期)2017-03-13
光学精密工程(2016年3期)2016-11-07
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10
雕塑(1999年2期)1999-06-28