基于磁异常信号的油田地下管线探测方法
2011-11-12 00:57龚大利刘得军
东北石油大学学报 2011年6期
龚大利, 张 嵩, 李 辉, 刘得军
( 1. 中国石油大学(北京) 地球物理与信息工程学院,北京 102249; 2. 中国石油昆仑合燃压缩气有限公司,安徽 合肥 230075 )
0 引言
随着我国经济的不断发展和城市化进程的不断加快,密布于城市各个角落的地下管线错综复杂,在施工过程中经常出现打漏管线现象,进而造成漏水、漏气、停电等事故.因此,开展地下管线的相关探测理论研究具有重要的现实意义.
人们对地表天然磁场的理论和应用研究不断深入.自20世纪60年代起,Labson V F等进行关于音频范围内天然地磁场理论研究;随后Romashets E, Montelli R等发表有关研究成果和应用专利[1-3].近年来,我国高校和科研院所也相继开展相关理论及实际应用研究,其中基于地磁异常的埋地管线探测方法就是在这种背景下提出的.传统的埋地管线探测包括磁力法、电磁感应法、磁共振法、超导效应法、磁通门法、磁光效应法、磁阻效应法等[4-15].这些方法在特定环境下具有一定的探测效果,但存在探测深度有限,容易受到现场其他电磁信号干扰,探测信号处理困难等问题,也不便于对探测结果进行可视化成像显示,进而直观反映管线的位置及其走向.
通常情况下,在均匀土壤介质中地磁场强度是一定的.当土壤中存在金属管线和其他磁性物质时,将改变地磁场的均匀分布,产生磁异常信号.通过扫描、采集、处理、分析地下管线磁异常信号,可以得到反映地下管线性质的数据.笔者提出基于磁异常信号的地下管线探测系统.该系统通过采集天然磁场信号,经过处理得到反映磁异常的数据,由显示系统进行三维数据成像显示,具有操作简便、精度高、抗干扰能力强等特点.
1 磁异常信号探测原理
地球在空间产生的磁场即地磁场.地磁场强度很弱,平均约为0.5 Gs,可以分为内源场和外源场部分.内源场起源于地表以下的磁性物质和电流,可以分为地核场和地壳场.地核场又被称为主磁场,是由地核磁流体发电过程产生的[16];地壳场又被称为局部异常磁场,是由地壳磁性岩石产生的.除此之外,内源场还包括外部变化磁场在地球内部的感应场.外源场起源于地表以上的空间电流体系,它们主要分布在电离层、磁层和行星际空间,随时间变化较快,所以外源磁场通常被称为变化磁场.
地核主磁场部分占总磁场的95%以上,局部异常场占4%,外源变化磁场占1%.地磁探测需要的是地球磁场的变化分量,即局部异常场[4].
1.1 地球磁场模型
人们提出多种地球磁场模型,其中高斯球谐模型最被认可.假设存在1个标量U,使得
ΔT=HXcos(x,t0)+HYcos(y,t0)+Zαcos(z,t0).
(1)
根据地球磁场的属性,标量U定义为磁势,满足拉普拉斯方程:
2U=0.
(2)
假设地球是半径为a的球体,在以球心O为原点的球坐标系中,极轴取为地球自转轴并指向北极,r为球心O至测点P的距离,θ为余纬度,λ为经度,则式(2)的球坐标形式为
(3)
式(3)的通解为
(4)

(5)

式(5)可以改写为
(6)

(7)

1.2 磁异常信号探测方法
含有铁磁性物质的物体受到地磁场影响而产生局部磁感应场,磁感应场的存在改变周围的地磁场分布,从而使得所在位置的磁场信号不同于周围磁场,即产生磁异常信号.通过探测、处理和分析磁异常信号,可以得到反映磁性目标的探测信息,这是基于磁异常信号目标探测技术的原理.
2 磁异常信号探测系统
2.1 硬件设计
基于磁异常信号的地下管线探测系统主要由天线子系统、主控子系统及上位计算机组成(见图1).天线子系统为磁异常信号探测传感器电路部分,主要探测地球磁场的梯度变化;主控子系统主要对天线所采集的数据进行存储、计算,并将处理结果传送上位机.主控制器上的算法实现和上位机显控界面的设计主要包括对采集数据的处理、运算、解释和成像算法实现,以及操作简单、显示直观、界面友好的显控软件设计等.
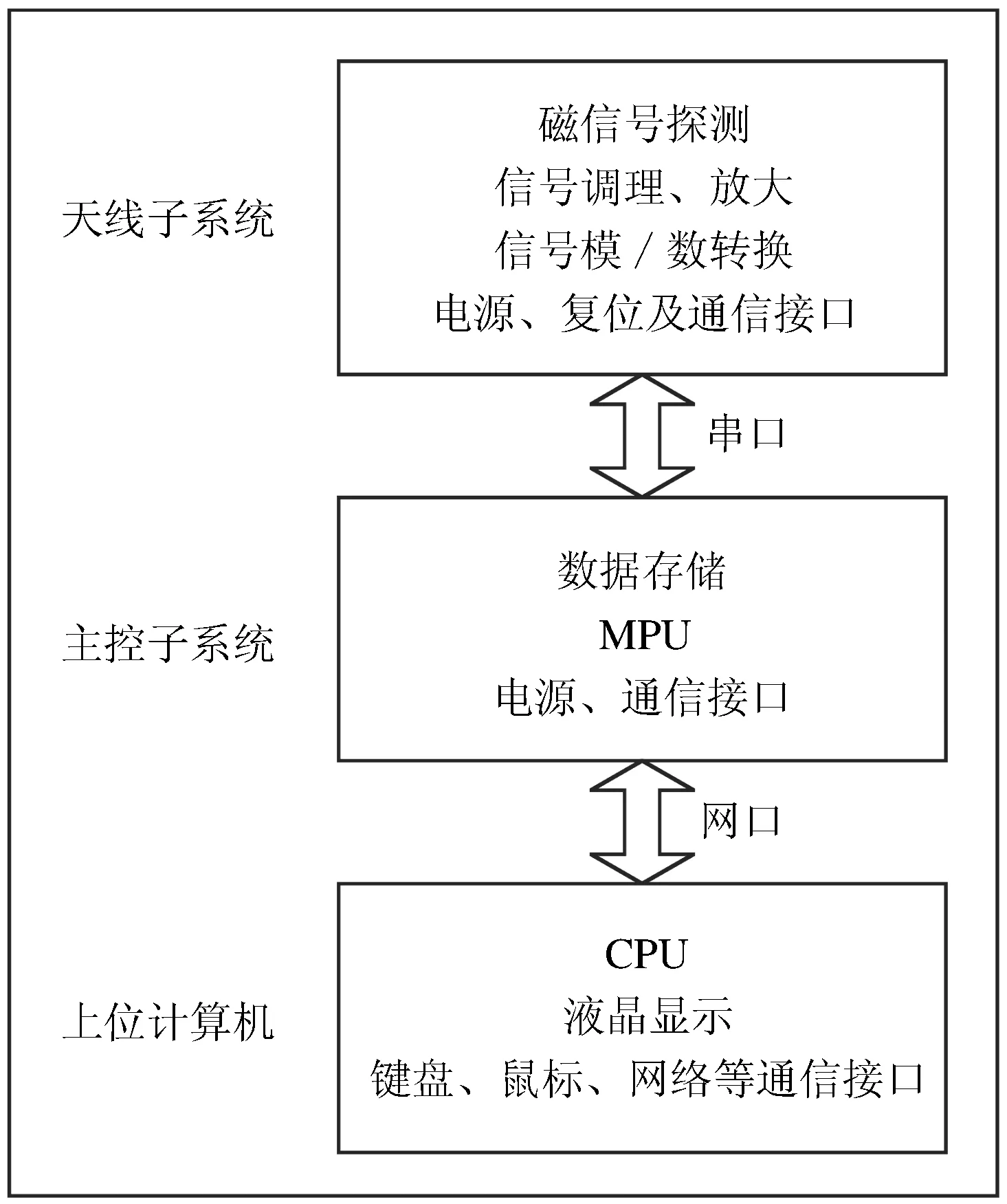
图1 管线探测系统组成
磁异常地下管线探测系统核心参数:天线子系统具有8个传感器,测量范围为±100 μT,扫描频率为1 200 次/s;主控子系统控制单元工作电流为250 mA,工作电压为12~38 VDC,工作温度为-20~ 60 ℃;上位计算机子系统数据传输率为100 MB/s.
2.2 软件设计
显控软件处理流程见图2.
在获得地磁数据库过程中,通常一些附加噪声迭加在地磁数据真实信号上,主要噪声源包括地磁传感器的测量噪声、载体磁场干扰、周围环境磁性干扰及其他各种误差和失真因素影响等.噪声使地磁测量信号产生不同程度畸变.因此,利用信号处理技术提升信噪比,将淹没在噪声中的地磁信号提取出来十分必要.利用标准正交基算法(OBF)对探测信号进行处理,降低干扰噪声对测量信号的影响,使探测信号更加准确.标准正交基算法以磁偶极子的经典数学表达式为基础,对磁异常探测信号进行变换可以得到1组正交基函数.作正交基与原信号乘积的积分,得到磁异常信号的能量信号E,以有效提高原始信号的信噪比和探测特性.同时,能量信号独立于磁偶极子方向,可用统一的正交基函数和信号处理过程处理不同磁偶极子信号.此外,应用标准正交基算法,可以对原始信号作近似实时处理,减少探测延迟时间(见图3).
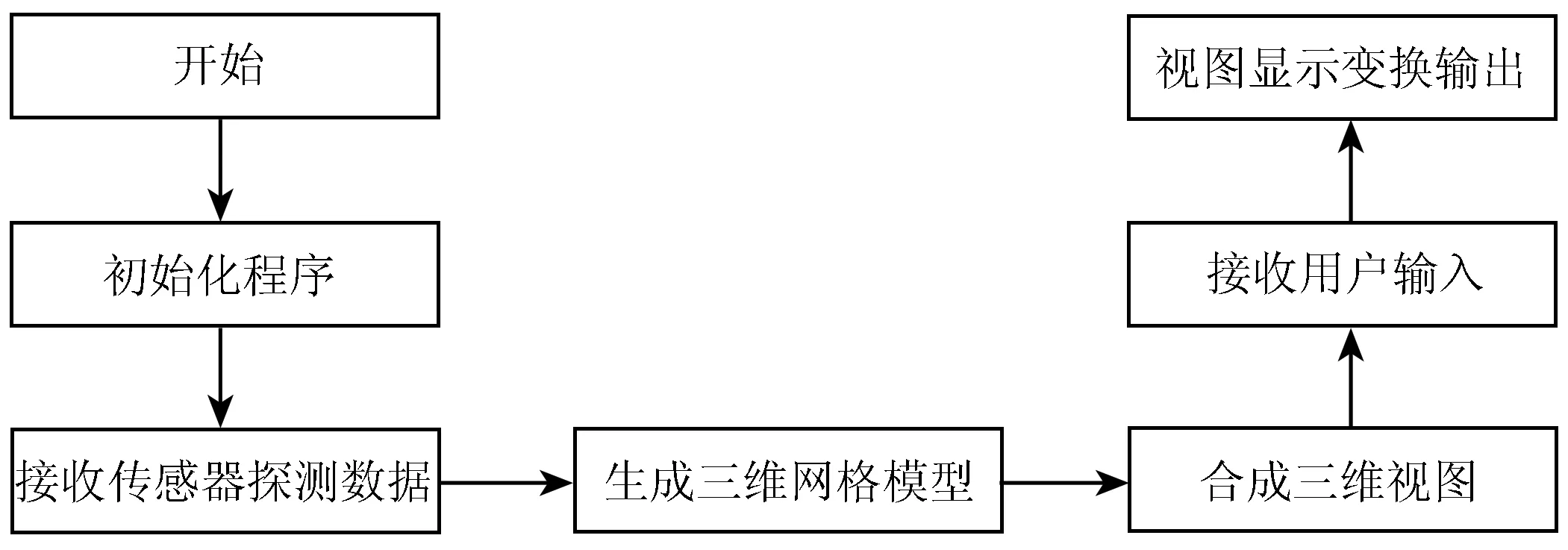
图2 显控软件处理流程

图3 基于OBF算法的信号降噪过程
探测信号经过OBF处理后,可以建立地磁数据库;再结合OpenGL图形处理软件,可以建立探测数据可视化系统,即显控系统.显控系统程序启动后,先初始化各界面元素组件及显示三维图像所需的光源对象;然后,从地磁数据库读取经过处理后的有效数据,或从外部接收经过OBF处理后的实时探测数据,并将其储存至一个指定数组中;最后,利用该指定数组中的数据生成三维网格模型及绘图画刷,并用绘图画刷绘制三维网格模型表面,将地下管线分布直观显示出来.
3 现场应用
3.1 地下金属管线探测
选取长度为1.0 m,内径为30 cm,外径为40 cm的柱状管线作为探测对象,将其埋藏于地下2.0 m.地磁管线探测仪在距离土壤表面10 cm左右进行扫描,扫描路径由南到北与管线走向成90°,扫描数据的三维成像见图4.由图4可以看出,突起处为地下金属管线,其磁场脉冲信号强度明显高于周围介质.
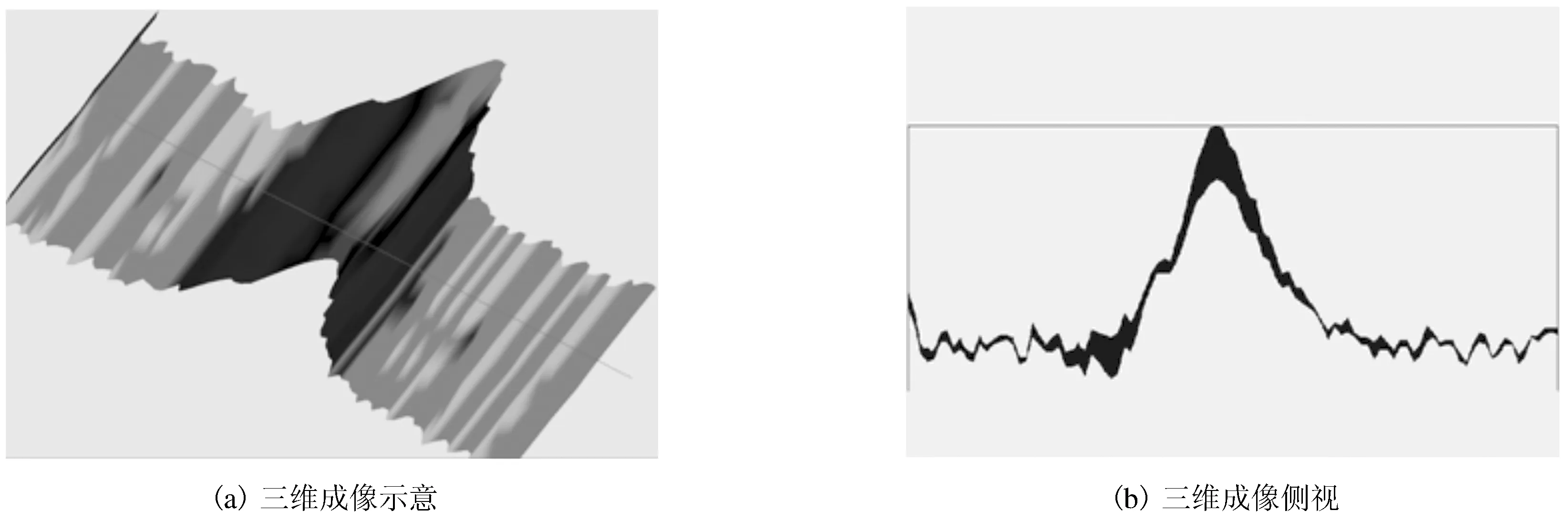
图4 地下金属管线探测结果
3.2 扫描时间对检测结果的影响
对同一根地下管线进行探测,对仪器设定不同扫描时间(分别为5,10,15,20 s)的探测结果见图5.在探测时匀速前进,扫描时间越长所扫描的区域越广,采集数据越多;随着扫描时间的增加,管线信息在图像上的成像越细小、越直观和清晰.在探测过程中,应该选择适当的扫描时间,以得到更好的成像结果及图像数据.在通常情况下,扫描时间应该能够使仪器完成对7倍左右管线直径的距离进行连续扫描为最佳.
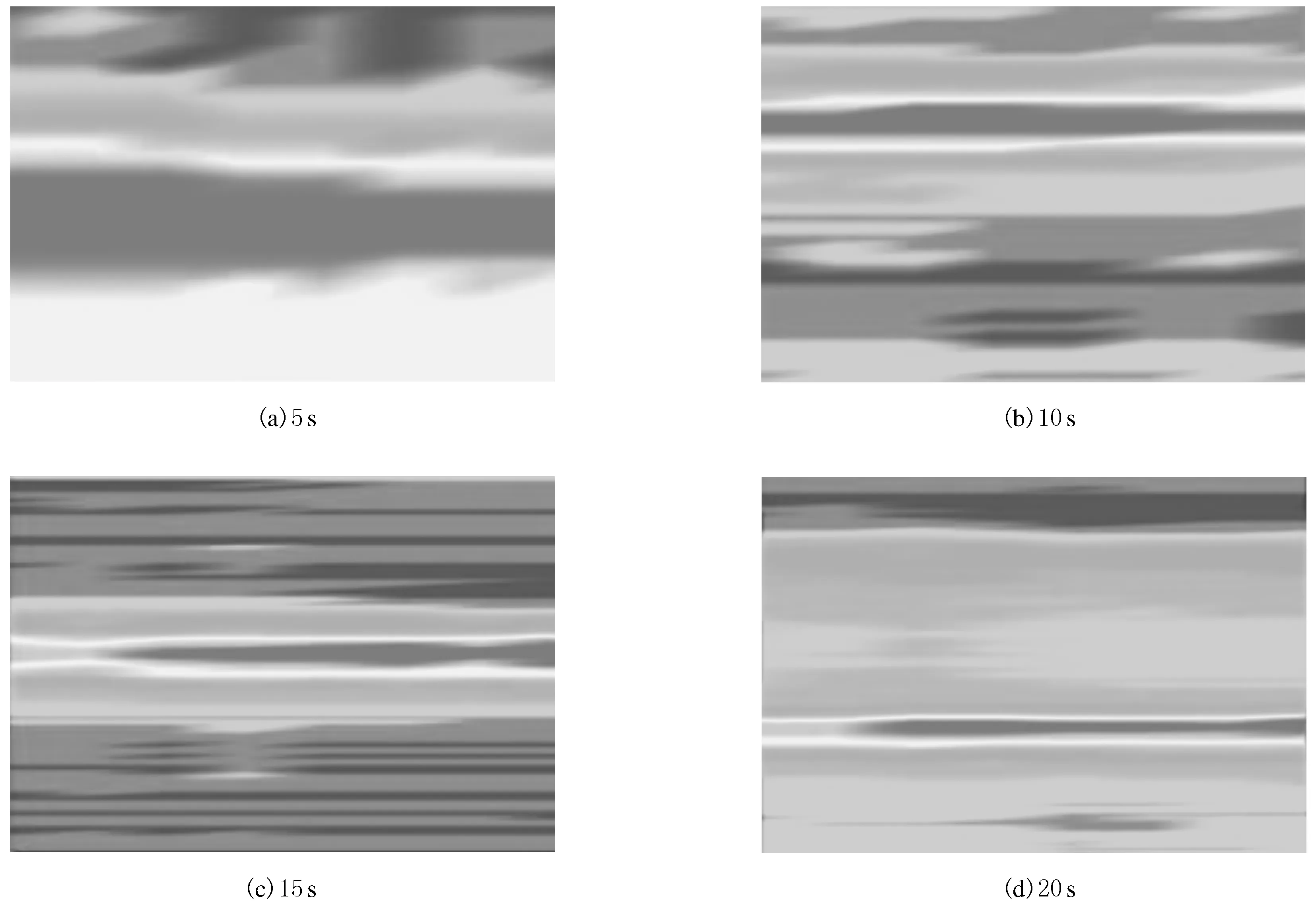
图5 不同扫描时间对成像的影响
3.3 测试角度对测试结果的影响
某公路埋深3.8 m地下管道现场探测结果见图6.该探测图像成像清晰,管线位置明确.由图6(d)可以看出,管线数据成像发生倾斜,可以判断埋地管线的大致方位和走向.
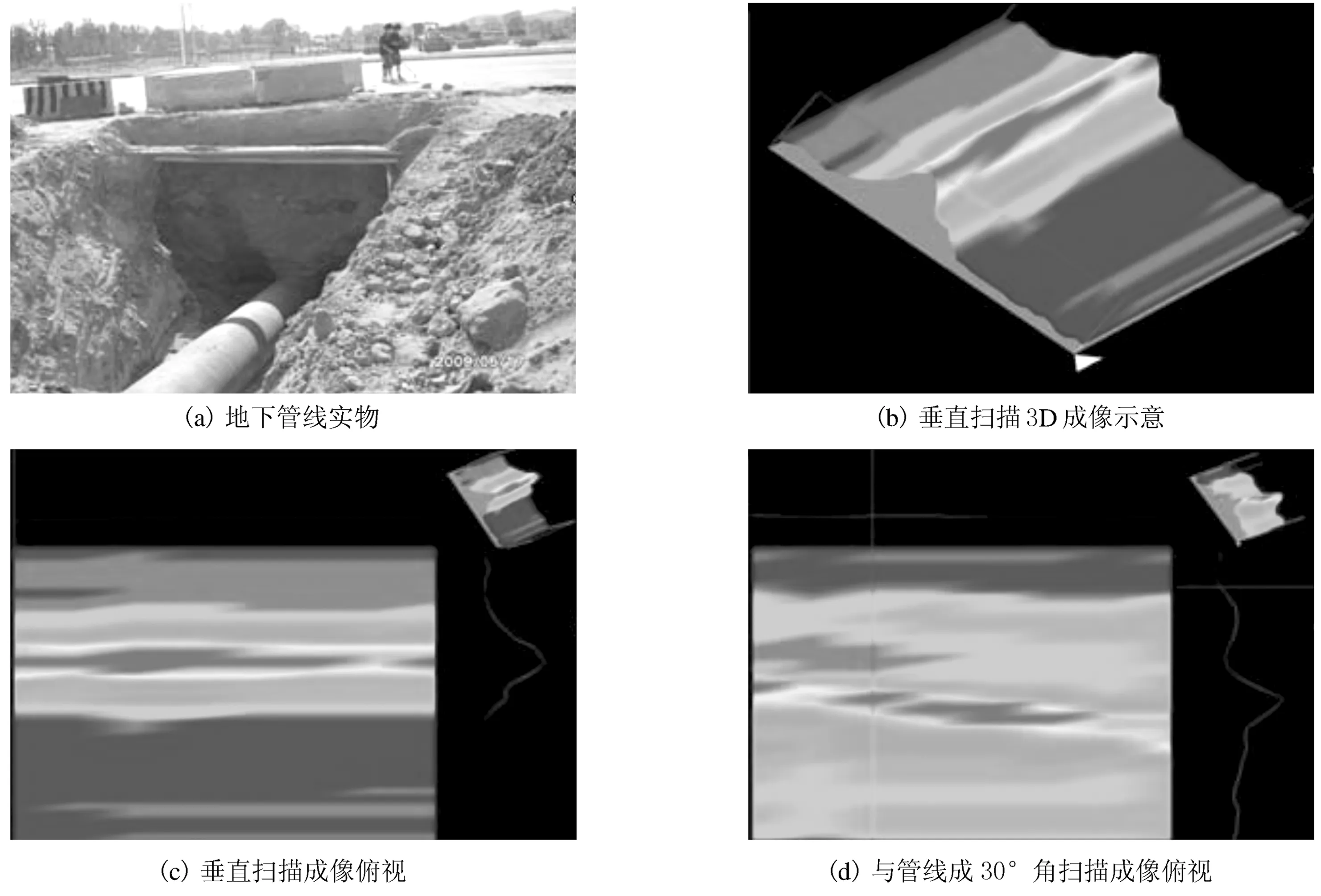
图6 不同角度探测成像示意图
4 结论
(1)对埋地管线位置的地表天然磁异常信号进行采集,并将采集到的数据利用标准正交基算法进行磁异常信号能量提升,最终生成直观反映地下埋藏物信息的三维磁异常数据图像,从而使操作人员通过人机界面对埋地管线进行直观探测与分析.
(2)基于磁异常信号的地下管线探测系统适用于探测不同地质条件下的管线、空洞等磁异常物质,探测深度为3.0~5.0 m,其测量原理简单,仪器体积小,质量轻,操作方便,显示直观,具广泛应用前景.
猜你喜欢
健康体检与管理(2022年1期)2022-03-18
中学生数理化·中考版(2020年12期)2021-01-18
微创医学(2019年2期)2019-12-22
医学食疗与健康(2019年5期)2019-09-10
新高考·高二数学(2019年2期)2019-09-05
民用飞机设计与研究(2019年4期)2019-05-21
成都信息工程大学学报(2018年4期)2019-01-23
电子制作(2018年23期)2018-12-26
传感器与微系统(2018年7期)2018-08-29
小学生学习指导(低年级)(2018年6期)2018-05-25