
SIMULINK中PMSM模型的改进及在参数辨识中的应用
2012-01-25 07:44王莉娜杨宗军
电机与控制学报 2012年7期
王莉娜,杨宗军
(北京航空航天大学 自动化科学与电气工程学院,北京100191)
0 引言
近年来,随着电力电子技术和稀土永磁材料的快速发展,永磁同步电机(permanent magnet synchronous motor,PMSM)日益受到关注。它在结构上采用高能永磁体作为转子,具有体积小、无励磁损耗、功率密度高等优点,广泛应用于作动系统、数控机床和机器人系统中[1-2]。永磁同步电机的优良性能受到众多学者的关注,对于其在Matlab中的仿真研究也日益增多。
目前,对于永磁同步电机的建模和仿真,得利于MatlabSIMULINK库中有封装好的PMSM模块,可以直接调用,大多集中在控制算法上,而对 PMSM本体的研究甚少。但是,随着应用的日益广泛,系统集成的PMSM模块出现不足,不能满足仿真要求,如电机参数不可在线修改,坐标定义不符合常规逻辑等,给研究带来不便。如何改进PMSM模块,使其适用于变参数变结构的动态仿真,具有实际意义。
本文首先分析指出SIMULINK中集成PMSM模块的不足,然后在建立PMSM数学模型的基础上给出两种改进方法,并进行可行性验证,最后结合自定义PMSM模型,将其应用在电机参数辨识中。
1 SIMULINK中集成PMSM的不足
1.1 电机参数不可在线动态修改
永磁同步电机种类繁多,参数变化大,对于一些特殊的电机仿真,需要在线动态修改电机参数。常规的SIMULINK模块在设定参数时,一般是在仿真开始前通过双击模块后弹出静态对话框进行设置。但是,在对时变系统进行动态仿真,研究变参数变结构模型的时候,模块的参数需要根据仿真环境的要求进行动态变化,这是无法通过设置静态框实现的。
例如在对PMSM的定子绕组电阻值做辨识研究时[3],需要在线动态修改电阻值以模拟其随温度连续变化的情况,属于变参数仿真。由于系统集成的PMSM模块不支持在线参数修改,使得仿真中只能验证算法对静态量的辨识效果,而对变化量难以考察。考虑从PMSM本体出发,建立适用性更广的电机模型显得必要和有效。
1.2 坐标变换与常规逻辑不同
SIMULINK中集成PMSM模块定义的坐标变换角与国内常规定义不同[4],如图1所示。常规定义中θ为d轴与α轴的夹角,而SIMULINK中则定义成q轴与α轴的夹角,记为图中的 γ,显然,θ=γ-90°,这导致了在常规的调速系统中反馈回路需要对θ做一次变换。
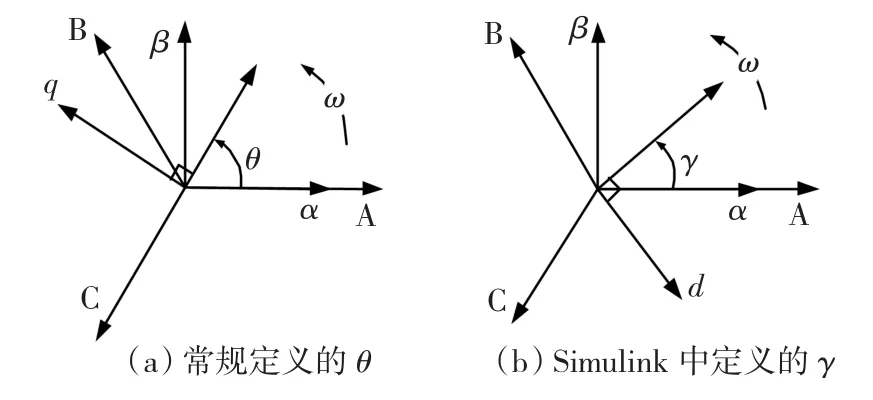
图1 PMSM模型中夹角定义的比较Fig.1 Contrast of defined angles in PMSM model
电机内部采用磁链不变的线性变换,常规从ABC到dq0坐标系的变换矩阵[1]为
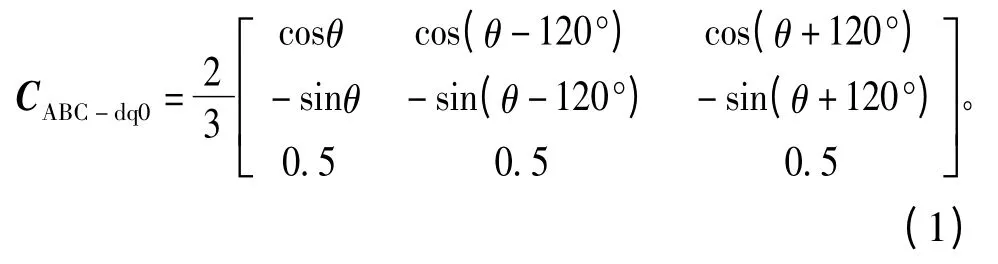
由于坐标定义的差异,集成PMSM模块内部的变换矩阵实际为
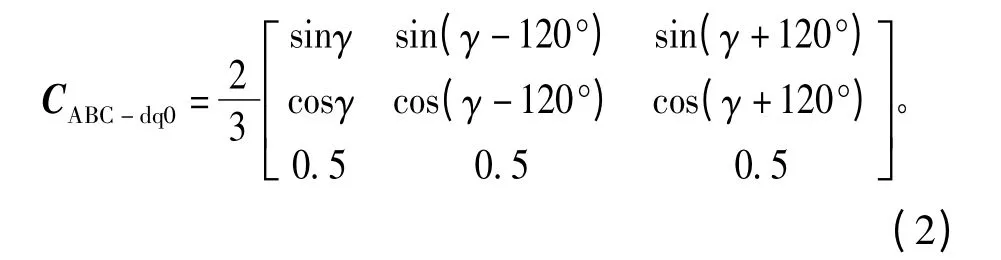
相位角的差异对Clarke变换不影响,但是Park正逆变换会发生改变,使得变换的中间量也有所不同,给分析研究带来不便。
2 对PMSM模型的改进
基于对SIMULINK中集成PMSM模块不足的分析,本文给出两种改进方法,并做对比和讨论。
2.1 方法一:修改库文件模型
为改进原有PMSM模型,使其具有在线动态修改参数的功能,一个直接的方法是根据需要对库文件模型做修改,再重新封装。
打开SimPowerSystems工具箱集成的PMSM仿真模块,鼠标右击并选择“Look Under Mask”命令,将出现其内部结构。模型中包含4个block块,主要的两个为 Electrical model和 Mechanical model。由于系统封装过的PMSM组件处于锁定状态,不允许用户对其直接修改,只能修改库文件。一般的操作为:
1)解锁。选中模块右击,在Link options中选择Go to Library block,然后在打开的库模型中选择Edit/unlock library完成解锁;
2)修改。找到需要修改的模块,替换成信号端、Fcn函数等;
3)更新。返回仿真界面,点击菜单Edit/Update diagram,更新修改的库模型到仿真中。
图2给出了引出转动惯量J前后的PMSM封装对比。仿真时J引脚可接上常量,变量,以及用SFunction写的含参变量的任意信号,实现参数动态变化。
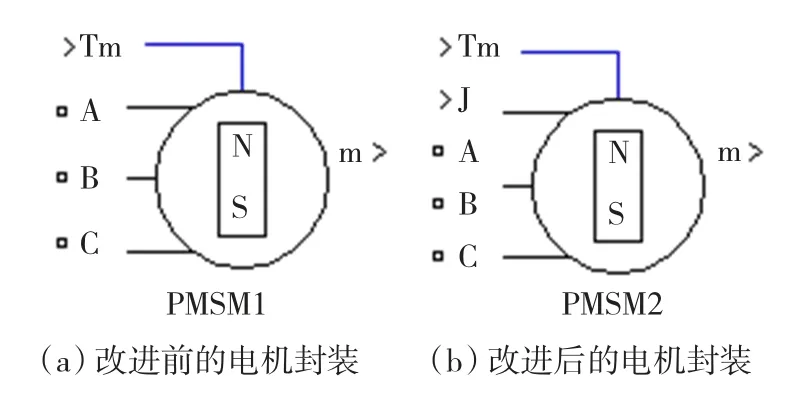
图2 改进前后PMSM模型的封装对比Fig.2 Contrast of PMSM encapsulation before and after improvement
该法是对原 PMSM模型的重新封装,方便快捷,适用于其他任何参数。不过,由于对库文件做了改动,当仿真文件移动到别的环境下时,需将库文件一起拷贝,降低了移植性。
2.2 方法二:创建自定义PMSM模型
方法二是在PMSM数学模型的基础上创建自定义电机模型,适用性广泛。
2.2.1 永磁同步电机的数学模型
为便于分析,假设磁路不饱和,在空间磁场呈正弦分布,不计磁滞和涡流损耗[1],在定、转子参考坐标系下,PMSM的模型如图3。
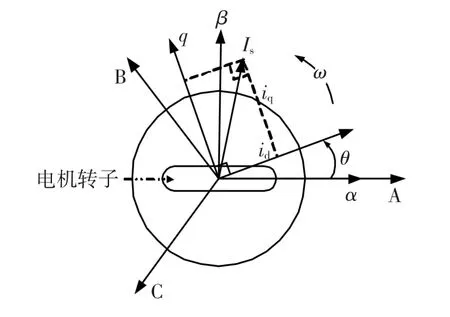
图3 PMSM的物理模型Fig.3 Physical model of PMSM
图中给出了分析同步电机数学模型常用的坐标系,在d-q轴系下PMSM的电压和磁链方程为
式中:ud、uq分别为 d、q 轴电压;id、iq为 d、q 轴电流;Ld、Lq为 d、q 轴电感;ψd、ψq为 d、q 轴磁链;ψf为永磁体磁链;R为定子绕组电阻;p为微分算子。联立式(3)、式(4),得

将上式(5)改写成以电流为状态变量的矩阵形式,即
根据状态方程(6)即可在SIMULINK中建立模型,或用S-Function编写关系式。其中变参L、R等均可根据需要,用接线端引出。
在d-q坐标系下PMSM的转矩方程为

机械运动方程为

式中:Te为电磁转矩;TL为负载转矩;pn为电机极对数;J为转动惯量;ωm为机械角速度;B为粘滞系数。图4给出了引出J的机械方程模型。
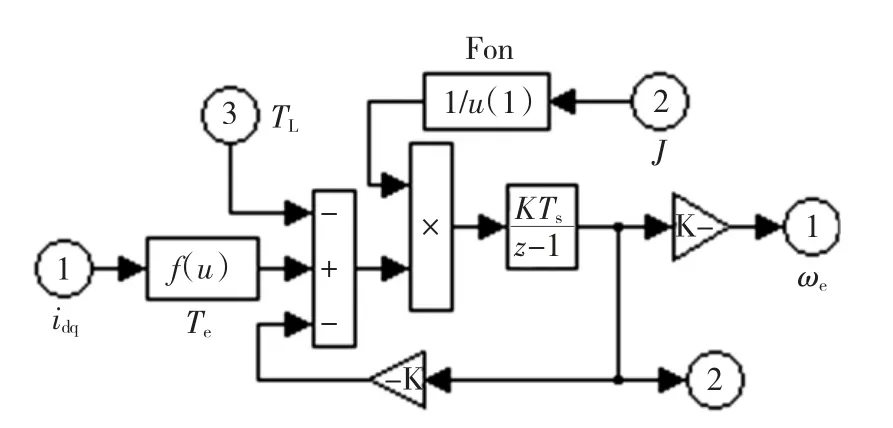
图4 机械运动方程的模型Fig.4 Model of mechanical motion equation
2.2.2 PMSM内部坐标变换
在电机内部,采用磁链不变的线性变换,根据常规变换矩阵(1),忽略0轴分量,有
式中θ为d轴与α轴的夹角。
由于自定义的PMSM模型属于信号模型,省去了功率部分,故可由正弦信号直接驱动,配合适当的信号增益可表示功率大小。当控制信号采用SPWM算法时,调制函数为正弦波,可以直接驱动电机模型。对于SVPWM算法,相电压的调制信号是马鞍形波[5],不可直接引入电机模型,由于其线电压调制函数是正弦波,故可利用线电压信号驱动自定义模型,此时坐标变换需改写成

对应的电流矢量逆变换矩阵在忽略0轴分量时为
对于SPWM,其线电压的调制函数也是正弦波,故模型可通用。
2.2.3 封装自定义PMSM模型
图5给出了封装好的PMSM模块图,在实际仿真环境中接上输入信号和反馈信号,即可完成相应的PMSM仿真。
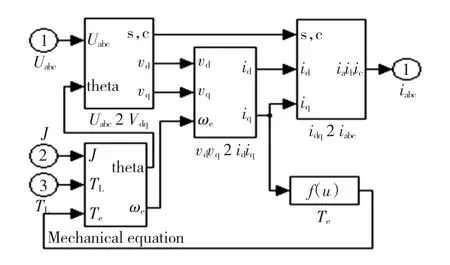
图5 封装的自定义PMSM模型Fig.5 Model of custom PMSM after encapsulates
自定义PMSM模型具有以下特点:
1)参数定义符合国内习惯。模型采用常规逻辑搭建,在考察中间变量时不会出现混乱,而且外部反馈的θ可直接引入,无需变换;
2)适用变参数仿真。自定义PMSM模型的所有参量均可引出,支持在线修改,对变参数变结构模型的动态仿真研究具有实用性;
3)简化系统外围电路。建立调速系统仿真时,自定义PMSM属于信号模型,可由控制信号直接驱动,省去功率开关模块;而且反馈回路可直接引用中间量id、iq,省去坐标反变换。
4)兼容性好。该模型在与其他库模型连接时,可以将电机模块作为信号模型处理,适用于常规连接方法。同时该模型较方法一来说可移植到任何仿真环境中使用。
3 仿真验证
在SIMULINK仿真环境中,建立 SVPWM双闭环调速系统模型[6-9]。通过对集成PMSM模型和改进的两种PMSM模型的对比实验,验证改进模型的正确性。
调速系统中电流调节器采用传统PI设计[7],其PI参数分别为kp=1 100,ki=7;速度调节器在对比了文献[7-9]后,采用简化的非线性 PI算法,具体设计为

式中ε为速度的误差率

仿真中的电机采用东莞电机有限公司GT17-75S72R型电机参数,其中额定转速N=1 500 r/min,额定转矩T=75 N·m,额定电流I=23 A,绕组电感L=2.1 mH,定子电阻Rs=0.331 Ω,永磁体磁链Ψ=0.353 7 Wb,转子转动惯量 J=0.025 2 kg·m2。
仿真进行0~1 500 r/min的转速阶跃响应实验,结果如图6所示。图6(a)、图6(b)、图6(c)分别对应系统集成PMSM模型,修改库文件模型和自定义PMSM模型的速度响应波形。从图中可以看出,在相同仿真环境下,3种模型得出的结果相同。

图6 不同PMSM模型的速度响应对比Fig.6 Contrast of speed response by different PMSM models
同样,在1 500 r/min恒转速下,对3种模型进行0~75 N·m的转矩阶跃响应对比实验,图7给出了三相电流的响应波形。这里为便于分析和对比,避免引入非线性,PI调节器未加限幅设置。分析波形可见,在仿真环境相同的条件下,3种模型得出的结果一致。仿真证实了改进模型的正确性。
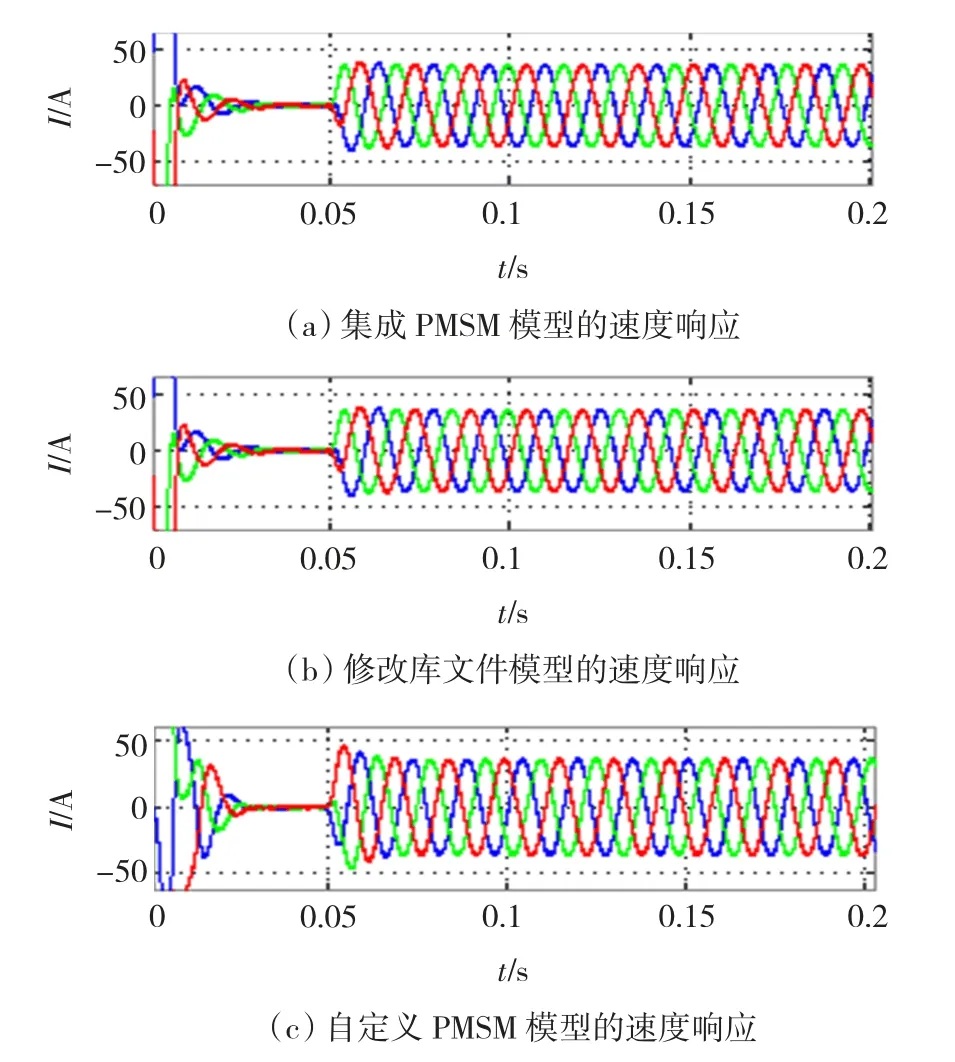
图7 不同PMSM模型的电流波形对比Fig.7 Contrast of current response by different PMSM models
4 参数辨识的应用
在电机常规参数[10-11]和非线性参数[12-14]的辨识算法仿真中,由于模型的局限性往往只能研究静态参数的辨识,而实际中很多参数是变化的,对算法动态性能的验证,就需要模型支持参数的在线动态修改。
文献[6]给出了模型参考自适应辨识算法(model reference adaptive identification,MRAI)在电机转动惯量J识别上的应用,这里结合 MRAI,利用本文改进后的PMSM模型,实现静态和动态J的参数辨识。
图8为MRAI的结构框图,其对应参考模型为
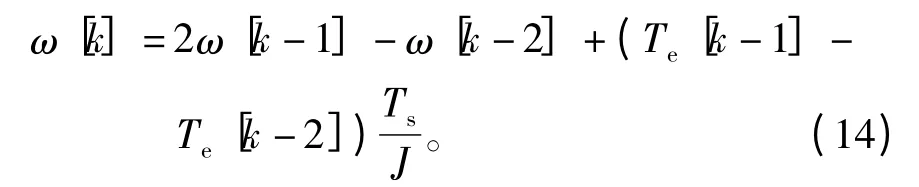
可调模型为

使用Landau离散时间递推参数辨识机制,自适应机制为

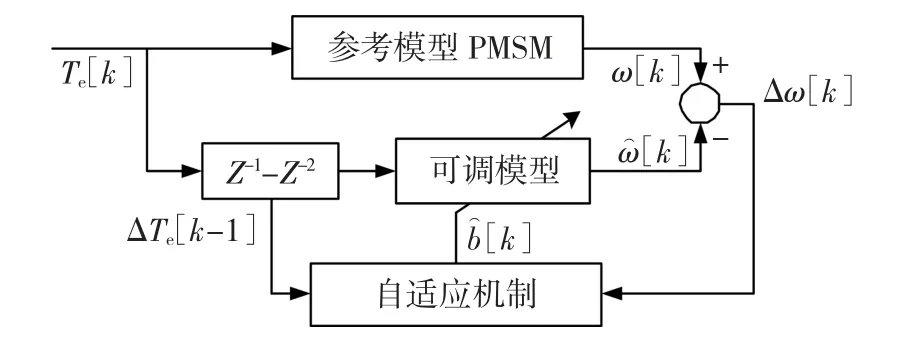
图8 MRAI的结构框图Fig.8 The structure of MRAI
依据MRAI的参数关系,在 SIMULINK中建立辨识模型。图9为带有辨识模块的自定义PMSM矢量控制框图。
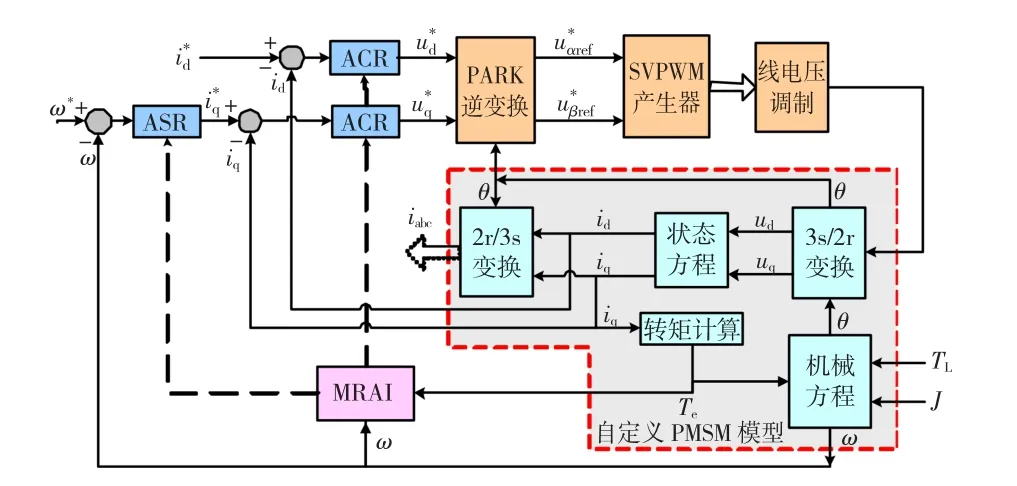
图9 矢量控制框图Fig.9 The vector control diagram
转子转动惯量 J0=0.025 2 kg·m2,给定 J为J0、2J0、5J0、10J0的连续阶跃信号,β 为 0.05,辨识参数J自收敛,未设置初值,其它参数同第三节给出,结果如图10所示。分析波形可见,在仿真时间t=0.1 s,0.15 s,0.2 s 时刻,转动惯量发生跳变,而辨识的J均在0.005 s内跟踪并准确识别。

图10 阶跃转动惯量的辨识结果Fig.10 Identification results of step inertia
当给定信号按照J=[2+sin(20πt)]J0正弦规律变化时,响应波形如图11所示,辨识值可以很快跟踪上给定值,与上述结论相同。仿真结果证实,改进后的PMSM可实现参数的在线动态修改,并在参数辨识中很好的运用。
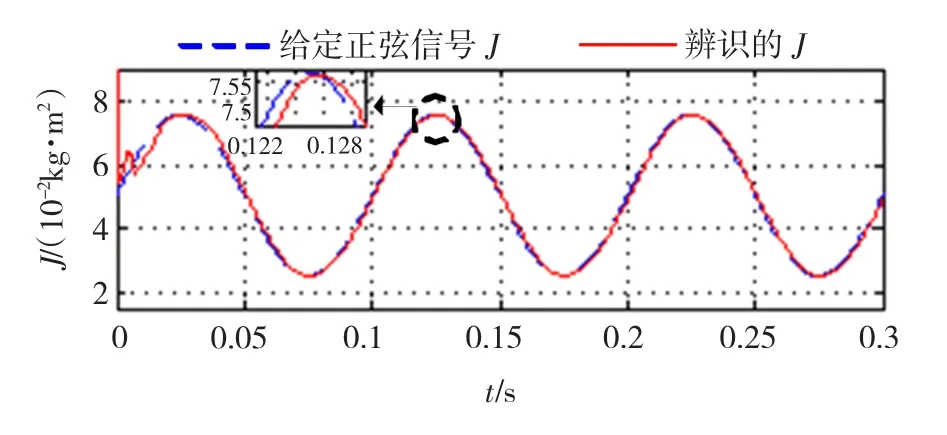
图11 正弦转动惯量的辨识结果Fig.11 Identification results of sine inertia
该PMSM模块适用于变参数仿真,对于电机其他参数的辨识也同样适用,这里不予展开说明,仅以J为例验证模型的适用性。
5 结语
SIMULINK中集成的永磁同步电机模型在仿真中应用广泛,但存在不足:电机参数不可在线动态修改,局限了模型在变参数动态仿真中的应用;坐标定义不符合常规逻辑,给中间量的分析和反馈信号的处理带来不便。本文针对不足,提出了对PMSM模型的两种改进方法,通过修改库文件模型和自定义PMSM模型弥补了系统集成模型的不足。仿真验证了改进模型的正确性,并结合MRAI算法将其运用在电机变参数辨识中,拓展了PMSM仿真的应用范围。改进的PMSM模型在时变系统变参数变结构模型的动态仿真中具有较大的实用性。
[1]李崇坚.交流同步电机调速系统[M].北京:科学出版社,2006:12 -54,263 -287.
[2]DE ALMEIDA A T,FERREIRA F J T E,FONG J A C.Standards for efficiency of electric motors [J].IEEE Industry Applications Magazine,2011,17(1):12-19.
[3]WILSON S D,STEWART P,TAYLOR B P.Methods of resistance estimation in permanent magnet synchronous motors for realtime thermal management[J].IEEE Transactions on Energy Conversion,2010,25(3):698-707.
[4]刘金海.Simulink自带永磁同步电动机模型矢量坐标变换分析与国产化改造[J].漳州师范学院学报:自然科学版,2010,23(4)4:73-76.LIU Jinhai.Vector coordinate transformation analysis and domestic reform of Simulink PMSM model[J].Journal of Zhangzhou Normal University:Natural Science,2010,23(4):73 -76.
[5]陆海峰,瞿文龙,张磊,等.基于调制函数的 SVPWM算法[J].电工技术学报,2008,23(2):37 -43.LU Haifeng,QU Wenlong,ZHANG Lei,et al.SVPWM algorithm based on modulation functions[J].Transactions of China Electrotechnical Society,2008,23(2):37 -43.
[6]XU Huazhong,XIE Jun.A vector-control system based on the improved MRAS for PMSM[C]//Intelligent Systems and Applications,2009:1 -5.
[7]LI Yun,KIAM H A,CHONG G C Y.PID control system analysis and design[J].IEEE Control Systems,2006,26(1):32 -41.
[8]王江,王静,费向阳.永磁同步电动机的非线性 PI速度控制[J].中国电机工程学报,2005,25(7),125 -130.WANG Jiang,WANG Jing,FEI Xiangyang.Nonlinear PI speed control of permanent magnetic synchronous motor[J].Proceedings of the CSEE,2005,25(7):125 -130.
[9]SANT A V,RAJAGOPAL K R.PM synchronous motor speed control using hybrid fuzzy-PI with novel switching functions[J].IEEE Transactions on Magnetics,2009,45(10):4672 -4675.
[10]LI Shihua,LIU Zhigang.Adaptive speed control for permanentmagnet synchronous motor system with variations of load inertia[J].IEEE Transactions on Industrial Electronics,2009,56(8):3050-3059.
[11]王庆龙,张崇巍,张兴.基于变结构模型参考自适应系统的永磁同步电机转速辨识[J].中国电机工程学报,2008,28(9),71-75.WANG Qinglong,ZHANG Chongwei,ZHANG Xing.Variablestructure MRAS speed identification for permanent magnet synchronous motor[J].Proceedings of the CSEE,2008,28(9):71 -75.
[12]LUUKKO J,PYRHONEN J.Selection of the parameters of a permanent magnet synchronous machine by using nonlinear optimization[J].IET Electric Power Applications,2007,1(2):255-263.
[13]金海,黄进.基于模型参考方法的感应电机磁链的自适应观测及参数辨识[J].电工技术学报,2006,21(1):65 -69.JIN Hai,HUANG Jin.Adaptive flux estimation and parameters identification of induction motors based on model reference approach[J].Transactions of China Electrotechnical Society,2006,21(1):65-69.
[14]UNDERWOOD S J,HUSAIN I.Online parameter estimation and adaptive control of permanent-magnet synchronous machines[J].IEEE Transactions on Industrial Electronics,2010,57(7):2435-2443.
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
高师理科学刊(2020年2期)2020-11-26
四川工商学院学术新视野(2020年2期)2020-08-13
光学精密工程(2016年3期)2016-11-07
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
振动、测试与诊断(2014年4期)2014-03-01
汽车电器(2014年8期)2014-02-28
物理与工程(2010年1期)2010-03-25
