感应电机自适应滑模增益控制器的设计
2013-07-07 15:40崔春艳李奎李兵付超郭佳
天津工业大学学报 2013年6期
崔春艳,李奎,李兵,付超,郭佳
(1.河北工业大学电磁场与电器可靠性省部共建重点实验室,天津300130;2.河北工程大学信息与电气工程学院,河北邯郸056038)
感应电机自适应滑模增益控制器的设计
崔春艳1,2,李奎1,李兵2,付超1,郭佳1
(1.河北工业大学电磁场与电器可靠性省部共建重点实验室,天津300130;2.河北工程大学信息与电气工程学院,河北邯郸056038)
针对传统滑模控制系统中扰动信号的临界值难获得且计算量大的问题,提出了一种新型的自适应滑模增益的感应电机矢量控制技术,以便对感应电机进行快速准确调速.这种方法不需要大量的计算,消弱了对于各种扰动信号边界的依赖,实现了滑模增益随系统中的电机参数和负载转矩的扰动而进行自动调整的目的.并利用李亚普诺夫稳定定理,证明了该调速控制系统的稳定性.Matlab Simulink仿真结果表明:自适应滑模增益的变结构控制方法对于电机参数和负载转矩的不确定性均能呈现很好的调速性能,计算量小,鲁棒性好.
感应电机;自适应滑模增益;矢量控制;滑模变结构
感应电机是一个具有非线性、时变、多变量、强耦合等特性的复杂系统,并且电机在运行过程中还会由于绕组升温等因素,导致绕组参数发生不同程度的摄动,特别是转子电阻发生变化.因此,如何借助恰当有效的控制方法,克服参数变化和不确定因素的影响,提高电机控制的鲁棒性是当前重要的研究课题.在当前的各种无速度传感器的矢量控制方案中,多利用测量的定子电压和电流值来估计转子速度.但是这项矢量控制技术同样依赖于电机参数和负载转矩等一些不稳定因素.由于滑模变结构控制具有对外部参数变化不敏感、抗干扰性高、外部动态响应迅速的优点,因此,近年来采用滑模变结构控制克服参数扰动和不确定性因素的影响受到越来越多的重视.文献[1]研究了一类不确定性非线性扰动算子系统的滑模控制器的观测器,系统鲁棒性较好.文献[2]在频域内对于不同滑模观测器的参数精度和宽度进行了分析,并根据给定的电枢电流估计了直流电机的速度.文献[3]将滑模控制技术应用在混合动力汽车的无传感器矢量控制系统中,结果显示在较宽的速度范围内,感应电机均具有快速精确的转矩轨迹.文献[4-5]研究了二阶滑模控制器,用于消弱传统滑模控制器的抖动问题.文献[6]设计了自适应的二阶滑模观测器,用来估计速度、转子磁链、负载转矩和转子时间常数.文献[7]结合非奇异终端滑模与高阶滑模的优点,提出一种基于高阶终端滑模的感应电机转子磁链观测方法.文献[8]研究基于龙伯格-滑模观测器的感应电机时变参数自适应辨识新算法.文献[9]设计了滑模速度控制器,采用模糊控制方法,设计了模糊切换函数,形成连续控制形式,代替传统的滑模符号切换函数,从而将其抖动降到最低点.为了克服滑模控制中的最大问题——滑模面附近的抖动,许多学者研究了高阶滑模.然而在高阶滑模中,为了获得高性能和高效率的控制方案,电机的定子磁链是关键因素,这样就必然要求精确系统参数或者用估计器来估计系统参数,因此高阶滑模控制是利用较大的计算量来换取减弱抖动的优点.文献[10-11]指出,之所以普通的滑模控制系统具有鲁棒性好的优点,均是基于已知干扰信号边界的前提,因为只有知道了干扰信号的边界才能计算滑模控制中的开关增益.但是,由于实际感应电机系统的复杂性,干扰系统的边界并不能简单的获得.也就是说滑模变结构控制方法只是在滑模面上才对系统的不确定性和扰动具有较大的不敏感,在滑模面以外的到达过程中仍然要受到不确定性的影响.为了克服这一缺点,目前感应电机控制系统中的一般做法有两种:一是采用高增益控制来加速到达速度,使到达过程缩短,但是这又可能加大滑模抖动和激发高频不稳定动态;二是通过高阶滑模来减弱抖动,但是这也同样需要付出更大的计算量.针对一般滑模变结构控制中为消除抖动而计算量大的问题,本文研究了一种自适应滑模增益的变结构电流控制器,不需要计算干扰系统的边界,当系统参数和负载转矩变动时,滑模增益在线自动调整,使得电机调速准确、快速,并且计算量小.
1 转子速度估计器
根据测量的静止参考坐标系中的定子电压和电流,可以方便地得到转子速度的估计模型.根据静止参考坐标系中的转子磁链方程,可以得到[12]:
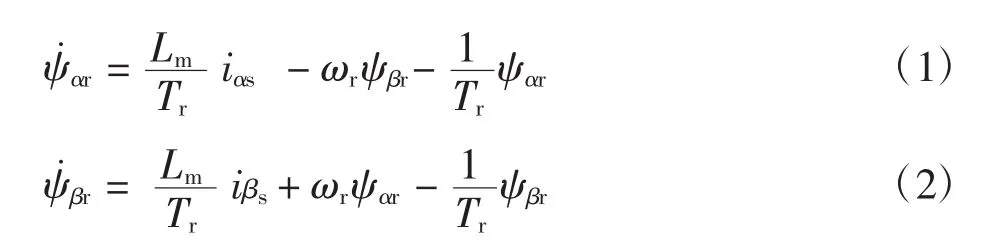
转子磁通矢量相对于α轴的角度记为θ.

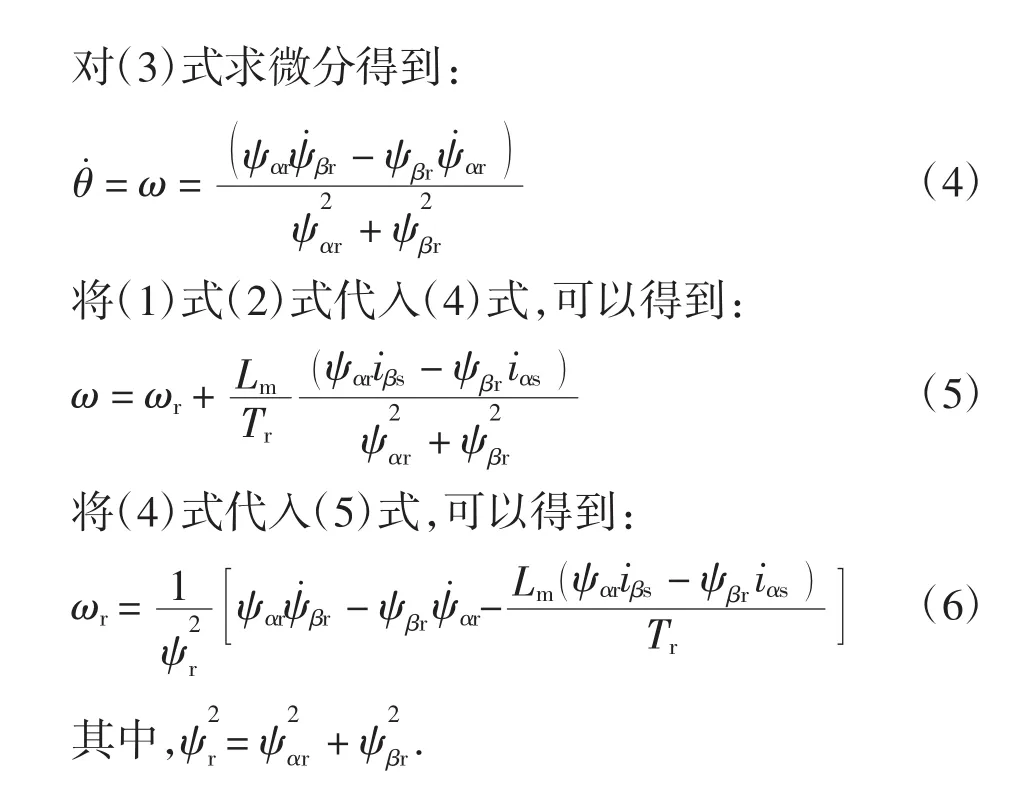
在利用(6)式估计转子速度时,需要用到转子磁链.转子磁链可以根据两相静止参考坐标系中的电压方程得到[12]:

在两相静止坐标系中,上述模型中所用的参数分别为:ψαr、ψβr为转子磁链;uαs、uβs为定子电压;iαs、iβs为定子电流;Rs、Rr分别为定子和转子电阻;Ls、Lr、Lm分别为定子电感、转子电感和互感为转子时间常数为漏磁系数;ωr为转子电角速度;
2 自适应滑模电流控制器
在按转子磁链定向的矢量控制系统中,由于规定d轴与转子的磁链重合,且d轴与q轴相互正交,所以:

所以感应电机的电磁转矩方程、磁链方程和机械运动方程可简化[13]为:


显然(18)式中的第1项是误差调整信号;第2项是控制信号;第3项包含了所有的扰动信号.
定义一个带有积分单元的滑模面:

采用具有自调整增益的指数趋近率u(t)


将(20)式代入(16)式,则可以得到自适应滑模变结构电流控制器的控制模型.

3 稳定性分析

根据李亚普诺夫稳定定理,定义Lyapunov函数为:

由式(25)可以证明,V˙(t)<0,因此上述滑模变结构电流控制器是稳定的.
4 仿真分析
根据(19)式、(21)式和(23)式构建滑模变结构电流控制器,根据(6)式和(4)式构建速度估计器,根据(15)式计算定子电流,自适应滑模变结构的控制模型如图1所示,电机参数如表1所示.仿真模型中给定转速为:0~1 s 250 r/min,1~2.5 s 150 r/min,2.5~3 s 100 r/min.负载转矩在2.0 s时发生突变.
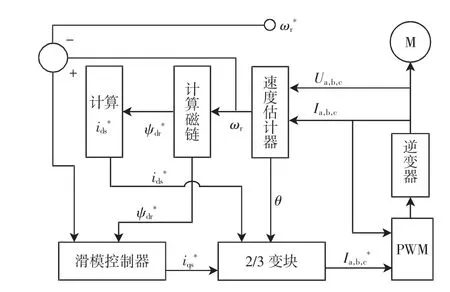
图1 自适应滑模变结构的控制模型图Fig.1 System diagram of adaptive sliding mode control
转速、滑模复量、自适应增益、电磁转矩随时间变化的轨迹如图2—图5所示.
由图2可以看出,滑模变结构算法调速性能快速、精确,鲁棒性好.由图3可以看出,在初始时刻,电机速度为零,因此滑模变量没有到达滑模面;当速度调整后,处于恒速区时,滑模变量也已经到达滑模面上;在t=1 s和t=2.5 s时,滑模变量远离滑模面,处于系统调速状态.由图4可以看出,在系统开始和t= 1.0 s、t=2.5 s时刻,由于系统中的转速发生改变,所以为了迅速调整电机转速,调整增益随着扰动自动调整,进而使得滑模变量可以迅速到达滑模面.由图5可知,在初始的加速区域,为了使电机获得较大的速度,电机转矩有一个非常高的初始值.在恒速区域时,电机转矩下降;在t=1.0 s和t=2.5 s时,为了减小转子速度,电机转矩再次增加;在t=2.0 s时,为了补偿负载转矩的增加,电机转矩增加.

表1 电机参数Tab.1Motor parameters

图2 转速随时间变化轨迹Fig.2 Trajectory of speed changing with time

图3 滑模变量轨迹Fig.3 Trajectory of sliding model variable
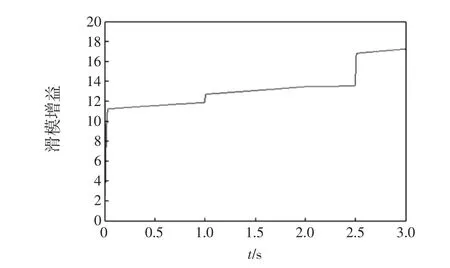
图4 自适应增益随时间变化轨迹Fig.4 Trajectory of adaptive gain changing with time

图5 电磁转矩随时间变化轨迹Fig.5 Trajectory of electromagnetic torque changing with time
5 结束语
本文研究了一种基于自适应滑模增益的感应电机控制方案.通过自适应的算法计算滑模增益,避免了计算扰动信号的界限,计算量小.利用李亚普诺夫稳定定理证明系统的稳定性,通过Matlab Simulink仿真显示了上述控制方案在外界扰动下能够自动调节滑模增益系数,快速精确的实现电机调速,抗干扰性好,鲁棒性强.
[1]YANG H,XIA Y,SHI P.Observer-based sliding mode control for a class of discrete systems via delta operator approach [J].Journal of the Franklin Institute,2010,347:1199-1213.
[2]BOIKO I.Frequency domain precision analysis and design of sliding mode observers[J].Journal of the Franklin Institute,2010,347:899-909.
[3]PROCA A B,KEYHANI A,MILLER J M.Sensorless slidingmode control of induction motors using operating condition dependent models[J].IEEE Transactions on Energy Conversion,2003(18):205-212.
[4]BARTOLINI G,PISANO A,PUNTA E,et al.A survey of applications of second-order sliding mode control to mechanical systems[J].International Journal of Control,2003(76):875-892.
[5]RASHED M,GOH K B,DUNNIGAN M W,et al.Sensorless second-order sliding-mode speed control of a voltage-fed in-duction-motor drive using nonlinear state feedback[J].IEE Proceedings Electric Power Applications,2005(152):1127-1136.
[6]AURORA C,FERRARA A.A sliding mode observer for sensorless induction motor speed regulation[J].International Journal of Systems Science,2007(38):913-929.
[7]史宏宇,冯勇.感应电机高阶终端滑模磁链观测器的研究[J].自动化学报,2012,38(2):288-294
[8]刘艳,齐晓燕.感应电机龙伯格—滑模观测器参数辨识方法[J].电机与控制学报,2011,15(8):93-100.
[9]沈艳霞,丁辉,纪志成.感应电机模糊滑模控制器的新型设计方法[J].电机与控制学报,2008,12(3):271-276.
[10]XIA Y,ZHU Z,LI C,et al.Robust adaptive sliding mode control for uncertain discrete-time systems with time delay[J]. Journal of the Franklin Institute,2010,47(1):339-357.
[11]PAI M C.Design of adaptive sliding mode controller for robust tracking and model following[J].Journal of the Franklin Institute,2010,347:1838-1849.
[12]谢仕宏,朱晓聪,孟彦京.静止坐标系下交流电机数学模型分析[J].陕西科技大学学报,2005,23(1):53-56.
[13]阮毅,陈伯时.电力拖动自动控制系统-运动控制系统[M].北京:机械工业出版社,2010:179-189.
[14]高为炳.变结构控制的理论及设计方法[M].北京:科学出版社,1996:27-30.
Design of adaptive sliding mode gain controller of induction motor
CUI Chun-yan1,2,LI Kui1,LI Bing2,FU Chao1,GUO Jia1
(1.Province-Ministry Joint Key Laboratory of Electromagnetic Field and Electrical Apparatus Reliability,Hebei University of Technology,Tianjin 300130,China;2.School of Information and Electric Engineering,Hebei University of Engineering,Handan 056038,China)
Aiming at the problem of the limit value of various disturbance signals not only being difficult to obtain but also needing a large amount of calculation in the traditional sliding mode control system,a novel adaptive sliding mode gain vector control technology of induction motor is proposed,in order to control the speed of induction motor accurately and fast.This method does not require a large amount of calculation and weakens the dependence for the various disturbance signals boundary.The system realizes the automatic adjustment of the gain coefficient of sliding mode according to the motor parameters and load torque disturbance.By using Lyapunov stability theorem,the control system stability is proved.The simulation results of Matlab Simulink show that variable structure control method about adaptive sliding mode gain according motor parameters and load torque uncertainties has good speed performance,small amount of calculation and good robustness.
induction motor;adaptive sliding mode gain;vector control;sliding mode variable structure
TM346.2
A
1671-024X(2013)06-0055-04
2013-06-24
国家自然科学基金资助项目(11272112);河北省科技支撑计划项目(12213912D)
崔春艳(1976—),女,博士研究生,讲师.
李奎(1965—),男,教授,博士生导师.E-mail:likui@hebut.edu.cn
猜你喜欢
微电机(2022年8期)2022-10-12
电机与控制应用(2022年1期)2022-09-01
电机与控制应用(2022年4期)2022-06-27
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
中国惯性技术学报(2019年6期)2019-03-04
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年7期)2016-11-16