等速万向节滑移曲线模糊测量法
2013-07-21 05:29刘晓军时轮秦绪起
轴承 2013年5期
刘晓军 ,时轮,秦绪起
(1.上海交通大学 机械与动力工程学院,上海 200240;2.上海三一科技有限公司,上海 200000)
按照性能,等速万向节分为定心型和轴向滑移型两大类,一个等速万向节传动系统一般由定心型等速万向节、轴向滑移型等速万向节和传动轴组成,其中定心型万向节安装于车轮一侧,轴向滑移型万向节安装于差速器一侧,中间的传动轴用于万向节连接,起传递运动的作用。滑移型等速万向节性能测试是整个等速万向节总成综合性能测试项目中至关重要的一项。
根据等速万向节总成标准JB/T 10189—2000[1]的规定,滑移型等速万向节的性能参数主要取决于许用工作角度和伸缩滑移量。许用工作角度能够保证滑移端在许可角度范围内灵活摆动,从而适应各种恶劣工作环境对摆动角度的要求。
而伸缩滑移量能够保证滑移端在许可位移范围内自适应地调整轴向间距,降低恶劣工况下导致的振动和冲击。这2项性能参数皆通过滑移与摆角特性曲线体现,因此该曲线基本可以作为滑移型等速万向节合格与否的评价指标。如果实际测量曲线能够将理论曲线完全包络,则表明该滑移型万向节合格;反之若理论曲线超出实际测量曲线,则表明该万向节未达到设计要求。
目前滑移曲线的传统测量法采用等间距测量,减小间距将导致试验效率降低,若提高效率则不能准确识别滑移曲线发生转折的区域,丢失重要的曲线特征信息,从而难以准确代表真实滑移曲线。在此,提出了滑移曲线的模糊测量算法,能够准确识别曲线的直线区域和发生转折的区域,并在不同区域分配适当的测量点数,可更加准确、高效地逼近真实曲线。
1 等速万向节滑移曲线测量
1.1 传统测量法
目前采用的等速万向节滑移曲线测量法是从滑移端压缩量最大处开始,将万向节等间距拉伸一定长度,并测量该位移处的许用工作角度,直到拉伸至最大拉伸处为止,然后将许用工作角度按照位移量绘制成滑移摆角曲线[2]。
传统滑移曲线测量法简易方便,能在一定程度上满足测量要求。若需提高测量效率,满足生产要求,只能减少测量点数,这样会损失大量的曲线信息,特别是滑移曲线发生转折的区域,影响对工件性能的正确评价;而如果测量点数太多,固然能更准确地逼近真实的滑移曲线,但会延长测试时间,降低测量效率和测试台的使用寿命。
1.2 基于模糊算法的测量法
1.2.1 测量思路
由于滑移型万向节特定的内部结构,其理论滑移曲线为分段连续折线段,如图1所示[3]。由于测量误差和万向节的制造、装配误差,实际测量曲线的直线段部分只是近似的直线,而转折点附近的区域则是一条不规则的弧线,并没有明显的直线转折,如图2所示。因此最佳的测量法应该能识别出转折区域,并合理分配测量点,即在信息量较少的直线段分配较少的测量点,在信息量丰富的弧线段分配较多的测量点。
1.2.2 二次测量法
基于上述思想,采用了二次测量法:首先,按较大的给定位移间隔(根据测量速度要求而定)测量整个行程的许用工作角度;然后,通过模糊算法确定转折区并分配最佳插入测量点数,从而得到二次测量位移值,并在返回行程中测量这些位移处的许用工作角度;最后,将2次测量结果合并得到最终测量结果。
1.2.3 最佳插入点数计算法
根据第1次测量的结果计算每一段折线的倾角,如果相邻两段折线的倾角未发生改变,则表明它们在一条直线上,如果后一段倾角相对前一段有所改变,则表明在后一段折线的某部分发生了转折,因此需要增加测量点,以测得过渡弧线段的曲线特征。
但测量试验中的测量误差等因素会导致本应在一条直线上的相邻两段折线的倾角并不相同,从而引起误判。另外,只能根据经验确定过渡弧线段应增加的测量点数,后一段相对前一段的倾角越大,中间的过渡弧线的弧度或弧线范围越大,即该区域包含的曲线信息越多,因此增加的测量点数也应该越多;反之亦然。同时,第1次测量时的固定位移间隔也很难确定,取值过大会降低测量精度,过小则会降低测量效率。
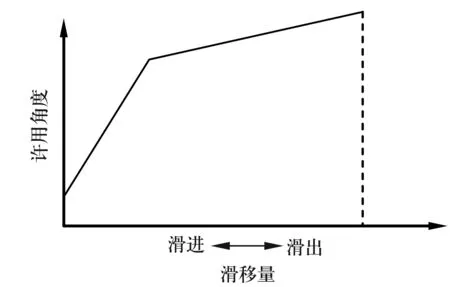
图1 理论滑移曲线

图2 实际测量滑移曲线
上述问题通过引入模糊算法加以解决。首先,允许相邻两段的直线倾角在一定范围内变化,而仍然认为它们在同一直线上,这样避免了测量误差等因素导致的误判;其次,根据经验将倾角变化和固定位移间隔分别描述为零、小、中、大等几个模糊集合,并根据实际操作过程中总结出的模糊规则进行推理计算,得出合适的测量点。
需要指出的是,虽然称作二次测量法,但几乎没有增加整体检测时间,其将一定的测量点数分配在往返运动过程中,既提高了效率又增加了准确性。
2 模糊控制器设计
首先将倾角变化量Eθ和测量间隔S作为模糊控制器的输入,其中Eθ=θi+1-θi(θi为首次测量时每段的倾角),输出为插值点数N(虽然理想曲线转折点斜率突然变化,但实际位移曲线却是一段过渡弧线段,因此将控制器输出设计为均匀分布的测量点数N)。根据经验可以确定上述输入、输出变量的论域和隶属函数,其中Eθ和S的论域均为{ZE,PS,PM,PB}(分别代表接近于0、正小、正中、正大),N的论域为{Z,S,M,B,V}(分别代表接近于0、小、中、大、很大)。它们的隶属函数分布分别如图3~图5所示。由于位移间隔S和插值点数N恒为正值,故其隶属函数只在正半轴分布。由滑移曲线的特性可知,许用工作角度为位移的不减函数,因此倾角变化量Eθ≥0,但考虑到测量误差等因素,有可能出现较小的负值,故定义其隶属函数的分布范围为[-5,90][4]。
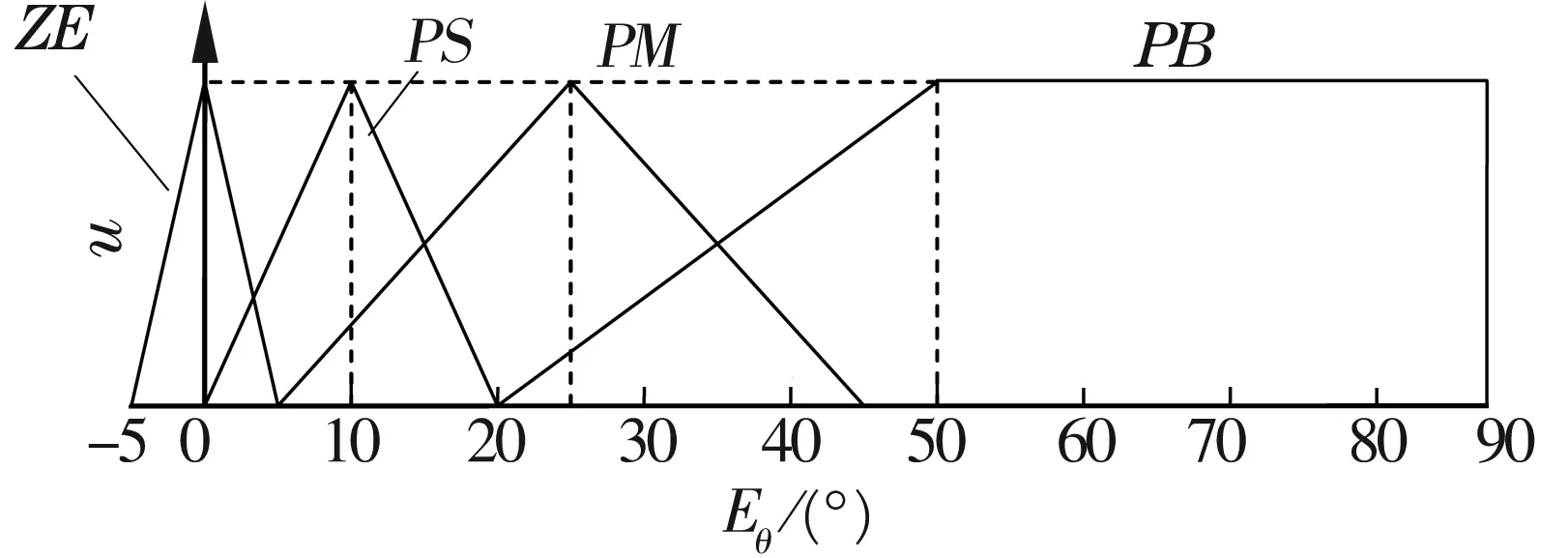
图3 倾角变化量Eθ隶属函数
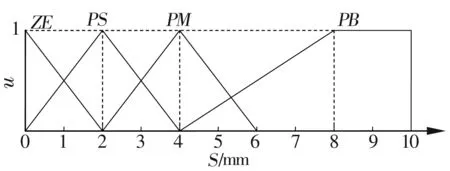
图4 测量间隔S隶属函数

图5 插值点数N隶属函数
模糊推理与合成方法采用最大-最小法,解模糊方法采用重心法,见表1。
3 试验分析
3.1 测控系统结构
研制的等速万向节驱动轴总成综合性能测试系统的硬件结构如图6所示。控制系统采用工控机作为测量控制核心,2个摆动台上的4个伺服电动机通过伺服驱动器驱动,由多轴伺服运动控制卡(固高GTS-800-PV)进行闭环控制,由伺服电动机的24位增量式编码器提供反馈脉冲[5],测试系统位移精度优于3 μm,摆角精度优于0.05°;各个传感器经变送器后输入数据采集卡(Advantech PCI-1716),由测量软件进行数据处理。
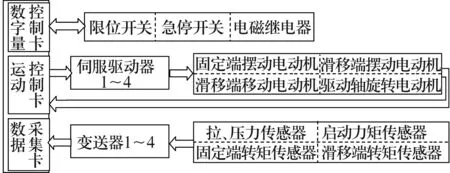
图6 测试系统硬件结构示意图
3.2 测量试验
为验证提出的模糊测量法的可行性,选用由XLAM005型固定端等速万向节和XLAM205型滑移端等速万向节组成的等速万向节总成在开发的等速万向节驱动轴总成性能试验台上进行了滑移曲线测量试验。首先采用传统测量法分别进行了轴向位移间隔为1 mm(图2),3 mm(图7)和5 mm(图8)的曲线测量,然后利用模糊测量法进行了轴向位移间隔为5 mm的曲线测量(图9)。作为对比,将1 mm曲线测量结果作为近似的真实曲线。
通过图2可以看出,真实曲线在0~5 mm和15~27 mm内为直线区域,在5~15 mm内为过渡区域,而传统5 mm间隔曲线丢失了5~15 mm区域的大量曲线信息,致使曲线产生较大程度的失真;通过图8和图9的对比可以看出,利用模糊控制器实现的模糊检测方法在5~10 mm内增加1个测量点,在10~15 mm内增加2个测量点,检测曲线得到了显著改善;通过图7和图9的比较则可以看出,虽然都是测量了10个点,但模糊测量法的曲线更逼近真实的曲线。
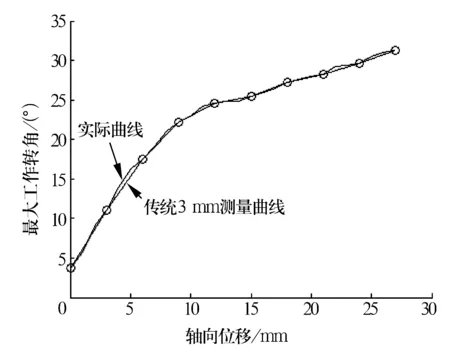
图7 传统3 mm间隔测量曲线

图8 传统5 mm间隔测量曲线

图9 模糊算法5 mm间隔测量曲线
分别以最大误差(各测量曲线与实际曲线摆角误差的最大值)和绝对面积误差(各测量曲线与实际曲线所围面积的绝对值之和)2项指标评价所测曲线准确程度,结果见表2。

表2 传统与模糊测量法精确度对比
通过表2可知,模糊测量比使用同样测量点数传统法的最大误差减小60%,绝对面积误差减小31.5%;比同样间隔传统法的最大误差减小55%,绝对面积误差减小52.5%,由此表明模糊测量法能够更准确测量滑移曲线特征,对传统测量法有较好的改善作用。
4 结束语
在分析传统万向节滑移曲线测量法不足的基础上,提出模糊算法曲线测量法,并通过试验证明该方法测得的曲线更加精确,实现了准确度和测量效率的平衡。
猜你喜欢
疯狂英语·新读写(2022年1期)2022-11-23
设备管理与维修(2022年9期)2022-07-14
辽宁丝绸(2021年3期)2021-09-11
电子制作(2018年12期)2018-08-01
精密制造与自动化(2018年1期)2018-04-12
浙江工业大学学报(2017年5期)2018-01-22
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01
北京航空航天大学学报(2016年5期)2016-11-16
测绘科学与工程(2016年4期)2016-04-17
中国房地产业(2016年9期)2016-03-01