工业机器人奇异位形分析
2015-02-15 03:10王春暖秦亚萍李伟娟
橡塑技术与装备 2015年18期
王春暖,秦亚萍,李伟娟
(包头职业技术学院数控技术系,内蒙古 包头 014030)
工业机器人奇异位形分析
Singularity analysis of industrial robots
王春暖1,秦亚萍2,李伟娟3
(包头职业技术学院数控技术系,内蒙古 包头 014030)
奇异位形是工业机器人机构的固有特性,当工业机器人处于奇异位形时,对于给定的轨迹控制和运动控制都无法准确实现,本文对工业机器人出现奇异位形的原因进行了简单分析,为初学者在操作机器人时避免奇异位形或是解决机器人通过奇异位形进行轨迹控制提供一点参考。
机器人;自由度;奇异性,奇异点
工业机器人是集机械、电子、控制、计算机、传感器、人工智能等多学科先进技术于一体的现代制造业重要的自动化装备,在提高产品质量与数量,保障人身安全,改善劳动环境,减轻劳动强度,提高劳动生产率,节约原材料消耗以及降低生产成本方面有着十分重要的作用。工业机器人技术也因此吸引了越来越多的不同专业背景的科技技术人员的关注和研究。
在操作工业机器人的过程中有时会遇到一些奇异位姿,导致机器人无法按预定的轨迹和运动进行控制,例如图1所示几种位姿。这就是所谓的工业机器人的奇异位形。奇异位形是工业机器人机构的固有特性,的解决有着十分重要的实际意义。本文从奇异性分析奇异点来分析了工业机器人产生奇异位形的原因。
1 奇异性分析
奇异位形是工业机器人机构的一个重要的运动学特性 ,它是指机械手的工作空间中 ,手部参考点不能实现沿任意方向的微小位移或转动时相应机械手的位形,或是机器人机构处于自锁状态或失控状态。工业上可以利用机构的奇异性实现一些应用,例如用自锁点位置来保证飞机起落架工作时的安全,以及冲压机构在接近极限位置开始冲压,但如果奇异位形出现在当机器人处于奇异位形时,如何在保证机器人工作性能和运动精度的前提下使其通过奇异位形是机器人应用的关键技术之一,所以分析其产生的原因对该问题机器人工作空间或所期望的运动范围内,这种奇异性将会消弱机器人的工作能力,使机器人机构达不到预期的位置。
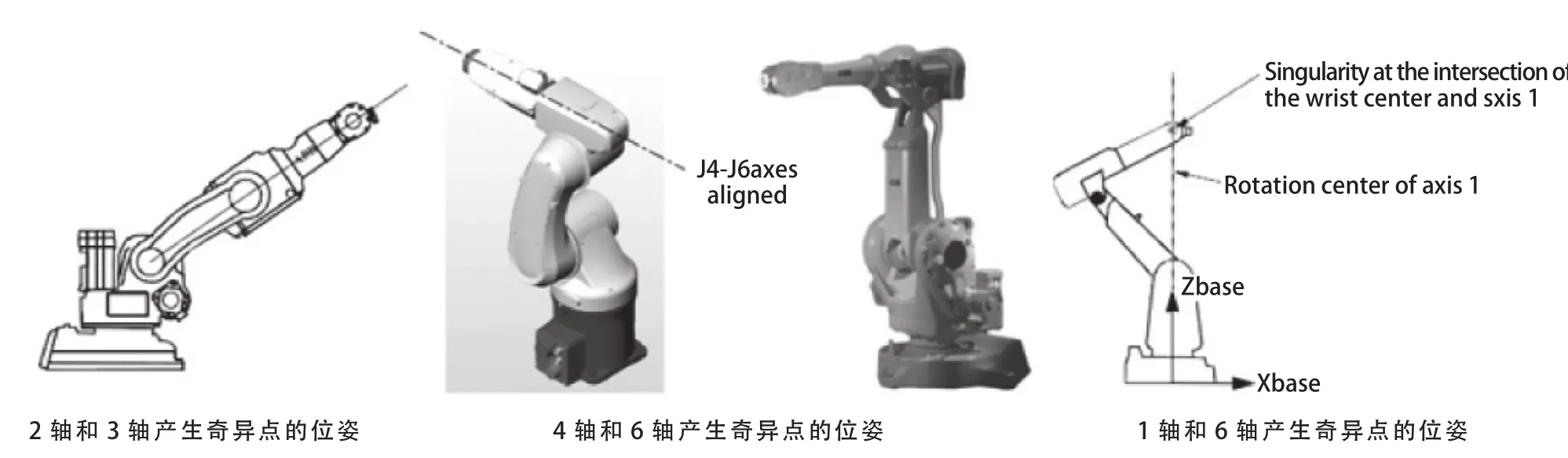
图1 机器人常见奇异点位姿
当工业机器人发生机构奇异时,其表现形式分多种:在代数学上表现为雅可比矩阵奇异;几何学上表现为关节轴线线性相关;运动学上表现为操作器失去一个或多个自由度;静力学上表现为一个或多个力螺旋对操作器不产生任何运动影响。因此,可以从不同的角度对机器人奇异位形进行分析。
奇异位形有两种类型,第一类是边界奇异位形,它出现在机器人执行器位于工作区的边界时,这种奇异位形不是很严重,只要控制执行器远离工作区边界就可以。第二类是内部奇异位形,如果出现两个或两个以上关节轴线发生线性相关时,因为这种情况可能出现在工作区的任何位置,这种奇异位形很难处理。
当机器人运动到奇异位置时 ,产生的不良影响主要表现在三个方面 。
第一,使机器人实际操作自由度减少 ,从而执行器无法实现沿着某些方向的运动, 同时减少了独立的内部关节变量数目。第二,某些关节角速度趋向无穷大, 引起机器人失控, 导致执行器偏离了规定的轨道。第三,使雅可比矩阵退化, 从而所有包括雅可比的求逆运算控制方案无法实现。
2 奇异点是如何产生的

图2 简单机器人
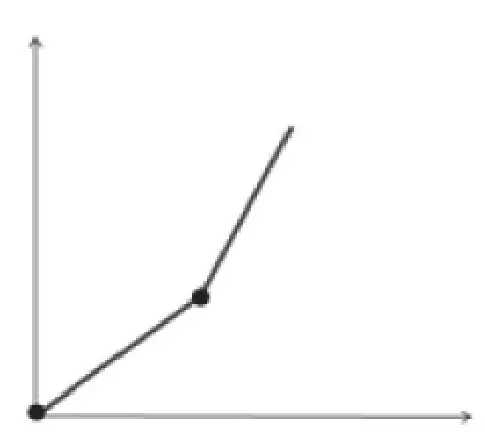
图3 简化模型
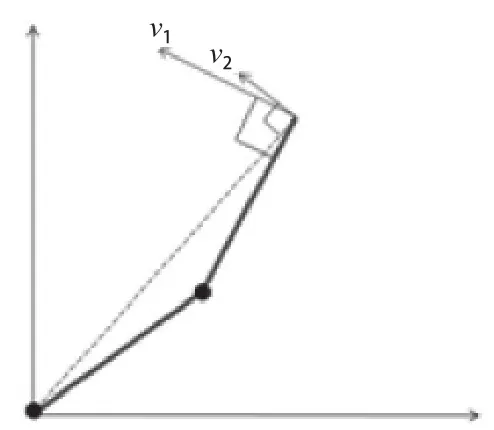
图4 矢量图1

图5 矢量图2
以图2中简单的机器人来解释奇异点的产生。这个机器人实际上有4个自由度:3个平动(x,y,z)加1个转动(z)。我们在此基础上再简化一下,留下2个平动(x,y),相当于我们只考虑在一个平面上的(x,y)坐标。简化模型如图3:这个机器人很直观啦,你可以控制两个旋转关节来改变机器人的端点坐标。
这个机器人的奇异点是什么呢?其实奇异点可以通过观察机器人端点的速度合成得到。比如在当前的姿态下,机器人的端点可以产生的速度是由两个速度合成的:v1和v2,如图4。v1是由第一个旋转关节产生的;v2是由第二个旋转关节产生的;可以看到两个速度矢量v1和v2在平面上没有共线,它们是独立的(记得线性代数里面的independent和dependent么)。机器人的端点可以产生的速度就是这两个矢量的合矢量,这个合矢量可以是任意的吗?来看两个分矢量:这两个矢量的方向是定了的(在这一瞬间),但是大小呢?大小是可变的,而且正比于相应的转动关节的角速度。(线速度=角速度×距离)可以知道在v1和v2不共线的情况下,我们是可以通过调整v1和v2的大小来得到任意的合速度的(大小和方向)。
但是,当机器人处于图5这个姿态的时候:可以看到两个速度矢量v1和v2在平面上共线了,它们是不独立的(independent)。这个情况很直接,无论你怎样改变v1和v2的大小,你都只能合成出和v1(v2)方向相同的速度。这就意味着你的机器人端点的速度不是任意的了,你只能产生某个方向上的速度。这样机器人就奇异了。
4 结论
在实际操作工业机器人的过程中出现奇异点的几率很小,出现奇异点后机器人不能动作,会报警,大多数情况下只能是重新复位,使能。
综上分析,目前解决机器人奇异位形的方法主要有两类:一是尽可能找出所有的奇异点,运动规划时避开奇异位置;二是路径穿越奇异点时规划满足某些条件的关节速度,使机器人的工作不受干扰。
[1] 胡准庆等.机器人奇异性分析,《机器人技术与应用》.
[2] Wikipedia, Gimbal Lock.
[3] Six-axis robot configuration singularities, Use of the V+MV.SL_Move routine and the speed.limit parameter. Adept.
[4] ABB Robotics, technical reference manual, rapid overview.
TP242
1009-797X (2015) 18-0111-02
A
10.13520/j.cnki.rpte.2015.18.043
王春暖(1981-),女,包头职业技术学院讲师主要从事数控技术教学和研究工作。
2015-08-11
猜你喜欢
数学物理学报(2022年2期)2022-04-26
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
中学生数理化·教与学(2019年8期)2019-09-18
制造技术与机床(2019年8期)2019-09-03
制造技术与机床(2017年9期)2017-11-27
现代防御技术(2016年1期)2016-06-01
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
新高考·高一物理(2016年1期)2016-03-05