一种桥式斗轮取料机行走机构改进方案
2015-12-08 09:20齐善朋
中国重型装备 2015年2期
齐善朋
(辽宁轨道交通职业学院,辽宁110023)
一种桥式斗轮取料机行走机构改进方案
齐善朋
(辽宁轨道交通职业学院,辽宁110023)
摘要:对通常只能在一个料场进行双向作业的桥式取料机的行走机构进行改进。取消原四轮架和端梁的固接螺栓,采用带轴肩中立柱的形式,在四轮架和端梁同一侧安装电液推杆,并在四轮架上增加顶升液压缸和回转液压缸。改进后的取料机实现了在双侧料场取料的工作。
关键词:桥式斗轮取料机;行走机构;电液推杆;液压缸
桥式双斗轮双向混匀取料机是在料场中使用的取料设备。它可在料堆横截面方向取料作业。通过斗轮装置、牵引机构、大车行走等机构的一系列运动将堆料机已纵向分层堆成的物料沿横断面取下,输送给地面出料胶带,完成原料输运系统的取料工艺要求,并可实现对物料的二次混匀。桥式双斗轮双向混匀取料机是由带换向功能的大车行走机构、桥梁架、受料带式输送机、斗轮装置 (由斗轮体、斗轮、斗轮小车等组成)、斗轮装置横移牵引机构、料耙、操作控制室、高压电气室、电缆卷盘等几大部分组成。
大车行走机构分置于两轨道上,桥梁架与大车行走机构两端固接。斗轮装置横移牵引机构由桥梁架支撑,斗轮体由横跨于桥梁架上的小车支撑,两斗轮装置通过刚性杆铰接,通过斗轮牵引机构实现斗轮装置在桥梁架上的左右移动。受料带式输送机安装在桥梁架上。斗轮取料作业时仅能从料堆底部取料,不能翻越料堆取料。
工作时,整个料场系统先起动,再起动受料带式输送机,待该机运转平稳后,再起动斗轮回转装置,随后起动斗轮装置横移牵引机构。牵引机构主要由驱动装置、链轮、链条、张紧缓冲装置等组成。斗轮小车是通过驱动装置带动驱动链轮的正反向旋转与固定在主梁上的链条啮合使其往复运动的。
1 问题提出
阿联酋某堆料场可实现在堆料机向两侧料场同时堆料,在堆料混均后用桥式斗轮取料机取完一侧料场的物料后,通过轨道移设至另一侧料场进行取料工作,行走机构在移设中需要两次改变车轮的行走方向才能完成最后的移设。而一台桥式双斗轮双向混匀取料机通常只在一个料场双向作业,故用户要求本机需具有自行转换行走机构运行方向和在相邻料场交替作业的功能。常见的桥式双斗轮双向混匀取料机的四轮架和端梁采用螺栓栓接在一起,主动车轮组和从动车轮组只能沿着端梁方向在轨道上双向行走,依靠四轮架上的销轴的转动自由度来抵消钢轨的安装误差和钢轨表面的积垢引起的振动,如图1所示。这就要求在设计行走机构时对原方案进行改进。
2 行走机构方案改进
在该料场取料机运行至料场边端移设轨道时,需要四轮架旋转90°,与端梁成垂直角度,原有的螺栓连接的方式是把四轮架和端梁固接在一起,不能实现相对转动。设计时把螺栓取消,而采用带轴肩中立柱的形式,由轴肩上的轴套承载端梁及其上其他设备的重量,中立柱上端由端盖和端梁连接。在四轮架和端梁同一侧安装电液推杆,在移设时带动四轮架旋转90°并锁紧,实现四轮架及车轮组的移设需要。改进后的行走机构如图2所示。
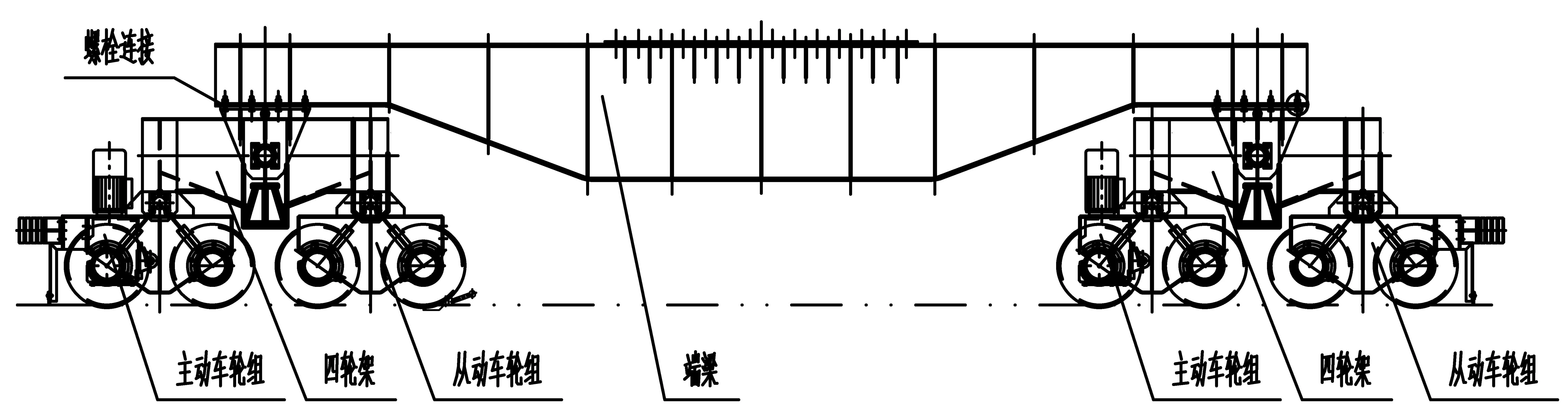
图1 行走机构常见方案

图2 改进后的行走机构方案

图3 桥式斗轮取料机移设示意图
行走机构工作过程为:行走机构跨于二条轨道上,用于支撑取料桥梁装置、受料输送机及斗轮装置等,以实现自由地移动取料机到便于取料位置,行走机构由端梁、驱动装置和行走机架等构成。
端梁两侧各两套行走装置,从动轮和主动轮直径为∅630 mm,轮缘为双轮缘平面踏面,驱动装置为“三合一”带内制动减速电机。
取料作业时,行走速度慢,行走速度V=2 m/min。调车作业时需要设备快速运行,行走速度为V=20 m/min,行走速度也可以根据实际情况调整。
四轮架上增加顶升液压缸和回转液压缸,在取料机运行至料场端部时可以将整机顶升起来,再通过回转液压缸将四轮架旋转90°,然后取料机沿换堆轨道运行至另一料堆的轨道上;顶升液压缸再次顶升,回转液压缸再次旋转90°,取料机换至另一料堆轨道上运行,其移设如图3所示。
3 结论
本文通过对桥式双斗轮双向混匀取料机行走机构的改进,经过设计带轴肩的中立柱和电液推杆实现了四轮架及其所带轮组的转动,满足了客户的需求,缩短了设计周期。
参考文献
[1]邵明亮.斗轮堆取料机[M].北京:化工工业出版社,2007.
[2]郭天纲.桥式刮板取料机结构分析及料耙研究[D].阜新:辽宁工程技术大学,2007.
[3]张春发.堆料机悬臂的动态分析[D].阜新:辽宁工程技术大学,2007.
编辑傅冬梅
工艺
Improvement Project of Walking Mechanism for a Certain
Bridge Bucket-wheel Reclaimer
Qi Shanpeng
Abstract:Walking mechanism of bridge bucker-wheel reclaimer that normally carried out double-direction operation just for one stock ground has been improved. Removing of primary four-wheel carrier and fixed joint bolt, means of shaft should and center pillar has been applied, that was electric-hydraulic pusher was mounted on one side of four-wheel carrier and end beam and jacking hydraulic cylinder and rotary hydraulic cylinder were assembled on four-wheel carrier as well. Reclaiming operation at bilateral stock ground has been accomplished by the improved reclaimer.
Key words:bridge bucket-wheel reclaimer; walking mechanism; electric-hydraulic pusher; hydraulic cylinder
收稿日期:2015—01—13
中图分类号:TH24
文献标志码:A
猜你喜欢
农业装备与车辆工程(2021年8期)2021-08-28
南方农机(2021年1期)2021-01-20
重型机械(2020年2期)2020-07-24
现代营销·理论(2019年10期)2019-09-10
再生资源与循环经济(2019年6期)2019-01-21
制造技术与机床(2017年5期)2018-01-19
制造技术与机床(2017年2期)2017-05-04
制造技术与机床(2017年12期)2017-02-02
科技与创新(2016年4期)2016-03-16
筑路机械与施工机械化(2014年2期)2014-03-01