
基于GPS系统的移动单机走行编码器自动校正方法
2018-04-15 11:41齐凯轩
商品与质量 2018年41期
齐凯轩
神华黄骅港务公司 河北沧州 061113
黄骅港堆场区域移动单机采用集控操作、自动控制模式,自动程度的提高对单机实时位置的准确性要求特别高,本文针对目前设备现状提出了可靠的、简易的、极具推广价值的方案。
1 黄骅港堆场现状及其问题描述
随着自动化技术的不断推广完善,目前国家能源集团黄骅港港务公司已实现堆场区域集控操作、现场无人化的阶段性成果。为确保生产的安全可靠,实现作业的精细化管理,准确、实时掌握移动单机的各类状态信息尤为重要,其中移动单机的位置信息是避免临近单机发生碰撞、避免货运事故的重要保障也是自动化作业准确运行的基本条件。目前堆场单机基于GPS建立统一的模型管理系统,所有设备在统一的坐标系统中,以实现单机的位置确认。随着近几年的运行,其中隐藏的问题逐渐凸显出来,对自动化作业产生一定影响:编码器数据由于依赖性降低,对编码器数据的维护不到位,在GPS数据不可靠的情况下,编码器数值不够准确,影响自动作业。
(1)GPS信号采集及使用中存在的问题。GPS基本的定位原理是卫星不间断地发送自身的星历参数和时间信息,用户接收到这些信息后,经过计算求出接收机的三维位置、三维方向以及运动速度和时间信息。每一颗卫星连续不断地向GPS接收机发送可跟踪的唯一编码序列,GPS接收机可根据编码辨认相关的卫星,进而计算出接收机的确切位置和准确时间[1]。
为建立统一坐标,在黄骅港堆场系统实际应用中,采用的是相对坐标:采用基站、移动站通讯,通过计算获取用户所需的坐标值。其基本原理如下:选择合适地点作为基准站,并在该位置安装一台GPS天线接收器,不间断地进行观测接收器接收范围内的所有GPS卫星,并通过相应的通讯设备将其数据实时地发送给各个移动站。各移动站的GPS天线接收器同样的扫描和接收各GPS卫星信号通过有效的通讯接收基准站传输的观测数据,然后通过计算,建立统一的相对坐标系统,各移动站的位置则实时的显示出来。
GPS通讯由天线接收器、无线电台、双天线平板电脑、串口服务器以及相应通讯线缆组成。通过近几年的连续工作,目前整体运行稳定,但出现问题后由于故障点不好排查,往往造成较长时间的故障停机,对生产造成一定的影响,其中各移动站故障事件较为突出:
(2)随着自动化程度的逐步推进,现场设备附属产品越来越多,天线接收器接收的高频信号有时会包含其他误信号,对GPS的精度产生影响。
(3)设备在实际应用中的工作环境并不理想。比如说,目前移动站单机由于轨道不平等一系列原因,各单机移动时会有不同程度的震动现象,GPS系统电器件较多,各接口偶尔出现松动现场导致GPS信号错误。
(4)其它未知原因造成的串口服务器死机或者GPS数据变慢情况时有发生。
当出现异常情况时,为保证移动单机能正常工作而不影响生产效率,则需要将准确的编码器数值进行调用,以保证移动单机不受GPS问题的影响。
2 行走编码器及使用中存在的问题
绝对值编码器的位置确定唯一的输出数值。编码器的输出值与位置的起始点和终点有关,而与中间的测量过程没有关系:在一圈里,每个编码器的输出数值对应唯一的数字代码,编码器的每一个数字代码对应的编码器位置也是唯一的。绝对值编码器按照使用量程一般又包括单圈编码器和多圈编码器。多圈绝对值编码器生产制作方法是基于单圈绝对值编码器的:根据钟表齿轮机械的原理,当中心码盘旋转时,通过齿轮传动另一组码盘(或多组齿轮,多组码盘),由此生产厂家利用此方法巧妙的在单圈编码的基础上再增加适当圈数的编码,以扩大编码器的测量范围,这样的绝对值编码器就称为多圈绝对值编码器,它同样是由机械位置确定编码,每个位置编码唯一不重复,从而每一个输出值都是唯一的,由于数值由机械位置确定所以不会发生因为断电产生丢失数据的情况。多圈编码器另一个优点是由于测量范围大,实际使用往往富裕较多,这样在安装时不必要费劲找零点,将某一中间位置作为起始点就可以了,而大大简化了安装调试难度[2]。
黄骅港移动单机行走距离较长,多采用多圈绝对值编码器。根据编码器通讯方式选择对应的模块进行连接通讯获取编码器初始值,并通过相应运算,计算出相应的数值。在现场实际的使用过程中,编码器寿命可达10年以上,出色的使用年限是保证编码器可靠的必要条件。但是由于编码器安装在行走轮的从动轮上面,由于从动轮偶尔会出现受力不均的情况,从动轮有时候会出现多转或者少转的情况,导致编码器出现不同程度的偏差,需要进行校正。以往情况是在行走轨道上,布置用于触发校正的开关,当单机移动至该位置并触发此开关后进行校正,其缺点显而易见:
(1)单机行走过程中通过触发预定位置的校正开关来校正编码器数值,由于行走速度、开关响应时间以及程序运算的影响,校正后的位置不够准确,往往存在半米左右甚至更高的误差,即便PLC运算中各主管人员添加校正偏差,由于每一次的工况都不尽相同,其结果也不大理想,偏差一直存在。
(2)开关存在误触发情况,导致编码器位置错误。
(3)开关数量多,线路较长,损坏后恢复不易。
编码器的优点以及校正存在的客观问题,使得港口机械对于编码器可以说是又爱又恨,既舍不得丢掉,又担心校正问题出现偏差。
本论文所提供的方法将解决以上问题,确保编码器数值真实有效。GPS信号作业移动单机行走的常规数据来源,当出现GPS信号问题时,通过PLC控制器用编码器数据替代GPS数据参与移动单机的自动、手动控制,实现数值间的无间断投切。本文设计系统由编码器、GPS系统和PLC控制系统的各硬件设备组成,无需额外添加其他设备,甚至于一定程度上可以精简其他不必要的检测装置,例如布置在单机及其行走轨道上的各校正开关等等。本文设计利用GPS系统,在GPS信号正常情况下,通过计算偏差值来校正行走编码器,使移动单机能够在GPS信号异常情况下能自动投切到编码器数值并保持与原有GPS坐标的一致性,从而保证移动单机能不间断作业,减少甚至避免因此造成的故障停机,提高移动单机的作业效率。
3 软件设计与实现
编码器基于GPS数值校正程序设计思路分为两种方法,均基于GPS信号正常的情况下。第一种是每月定期校正:当行走命令消失60秒后,在GPS信号(标签gIN_GPSSignalsValid_OK)正常的情况下,每月1日自动计算一次GPS行走数值与行走编码器数值的偏差,然后计算编码器数值与该偏差值数值之和即为校正后的单机位置值。第二种是因其他情况出现较大误差时的自动校正:移动单机行走结束一分钟后计算GPS数值与编码器数值的差值,差值的绝对值在1(可根据实际情况进行调整,以下数值相同)米以内不校正,1到5米之间自动校正,校正的计算方法与第一种方法相同;大于5米或者每天自动校正次数超过2次则不再触发该校正程序,因为按照编码器的稳定性来讲,一般不会出现频繁校正或者误差值突然增大的情况,误差都是较长时间的累积叠加起来的,出现此种情况该段程序结束执行,并通过HMI报警进行报错,提醒操作员以及技术人员及时查找原因并解决问题,避免出现编码器因长时间不使用而不了解其工作状态的情况。
以上校正方法,通过获取静止时候,GPS信号正常下的GPS行走数值来校正移动单机编码器,有效解决了GPS信号不准的问题以及常规情况下编码器数值出现偏差的问题。
4 试验数据分析
为了验证本方法的可行性,对1号堆取料机进行了长期的数据观察对比,在GPS信号以及编码器正常运转情况下,通过触发自动校正程序,编码器与GPS数值的差值始终维持在1米以内,满足黄骅港堆场单机自动作业条件。
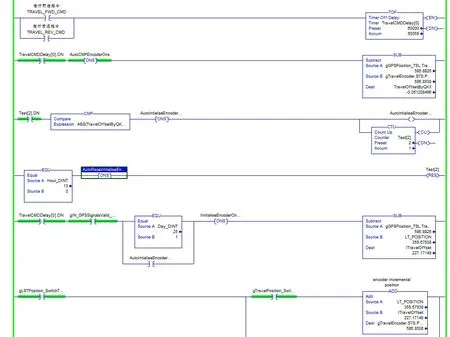
图1 程序设计图
5 结语
本论文基于现场现有设备,并对编码器校正环节进行改进和完善,解决了造成编码器校正不准的问题,减少了人工的干预程度,提高了设备的自动化程度。
经测试本文设计的移动单机行走编码器基于GPS的校正方案,很高的准确性,能保证编码器数值处于待命状态,当GPS信号异常时可随时进行投切并投入使用,能有效避免因行走位置不准确造成的故障停机,在保证移动单机持续作业方面具有很高的推广价值。
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
锻压装备与制造技术(2021年5期)2021-11-13
新疆钢铁(2021年1期)2021-10-14
军民两用技术与产品(2021年4期)2021-07-28
科学技术创新(2021年5期)2021-03-17
航天工业管理(2020年11期)2021-01-04
——编码器
演艺科技(2020年7期)2020-08-13
国学(2020年1期)2020-06-29
航天工业管理(2019年11期)2019-04-20
雷达学报(2018年3期)2018-07-18
