
基于改进锁相环型PMSLM无传感器控制
2018-12-29 05:18闫晓宏
微特电机 2018年12期
闫晓宏,王 伟
(1.国网山西省电力公司吕梁供电公司,吕梁033000;2.国网山西省电力公司电力科学研究院,太原030001)
0 引言
永磁同步直线电动机(以下简称PMSLM)具有损耗小、体积小、结构简单、推力大、定位精度高、功率因数高、效率高和过载能力强等优点,广泛应用于机器人、轨道交通和高精度数控机床等工业自动化领域[1-4]。
为了实现对PMSLM的磁极位置、动子速度和电磁推力的精确控制,需要采集电机动子的位置信号。一般在工程试验上采用安装精密光栅作为位置传感器,然而,这类精密光栅式机械传感器易受安装精度、高温、潮湿和振动等因素的影响。为了提高PMSLM驱动系统对外界因素的抗干扰和容错能力,本文采用的PMSLM无位置传感器技术在工业领域具有重大的应用意义。
针对精密光栅式位置传感器在某些特殊场合应用受限的情况,近年来研究人员提出了以下几种无位置传感器估算的方法,主要有:基于反电动势的磁链观测法[5];基于电机凸极效应的高频信号注入法[6-9];基于状态观测器的卡曼尔滤波器法;滑模观测器法[10-11];Luenberger 观测器法;非线性观测器法[12];模糊参考自适应算法[13-15]。
滑模观测器作为一种新型的无位置传感器估算算法,具有鲁棒性好、动态响应快、算法简单和抗干扰能力强等优点,适合运用在工程领域[16-20]。然而在利用磁极位置估算电机速度过程中,受处理器运算速度和采样延时的影响,电机估算磁极位置会出现一定的抖振(估算的电角度在实际的电角度上下振荡),导致电机估算速度会有一定的脉冲尖峰,造成控制转速调节器的饱和,影响系统的控制性能。为了能够准确获得电机的速度,常用的处理方法是通过对电角度求微分,然后通过低通滤波器滤除脉冲尖峰,最后反馈给速度环。这种方法能够过滤掉抖振的位置信号,获得平滑的速度信号。然而低通滤波器的使用会导致速度响应滞后,影响系统的动态性能。另外一种方法是采用锁相环。这种方法具有良好的抗干扰能力,能够消除估算角速度累积的静态误差,但是这种方法在电机起动阶段估算速度偏差较大,甚至会导致电机起动失败,需要采用其他的辅助算法起动电机[20]。
在利用滑模观测器估算PMSLM磁极位置基础上,本文提出了一种新型的锁相环结构,可以对滑模观测器估算得到的磁极位置闭环控制,进而获得平滑的电机速度信号,改善电机速度抖振现象。
1 PMSLM数学模型
PMSLM在d,q坐标下的磁链和电压方程如下:

式中:uq,ud为交、直轴电压;ψq,ψd为交、直轴磁链;iq,id为交、直轴电流;Lq,Ld为交、直轴电感;ψpm为永磁体磁链幅值;Rs为定子相电阻;ωe为电角速度,ωe=πv/τ,v为动子速度,τ为极距。
由电磁转换的公式推导出其力学方程:

式中:Fe为电磁推力。
利用坐标变换,对式(1)和式(2)处理可以得到电机在静止坐标系下的数学模型如下:
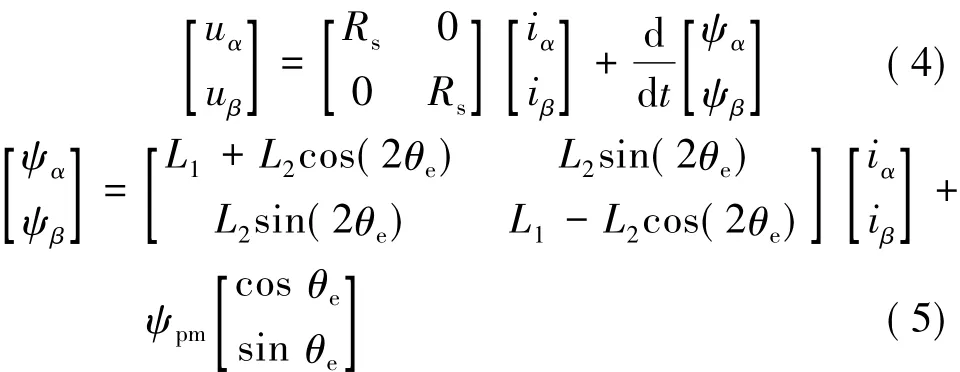
式中:uα,uβ为α,β 轴电压;ψα,ψβ为 α,β 轴磁链;iα,iβ为α,β轴电流;θe为电角度;L1,L2为电感变量,L1=(Ld+Lq)/2,L2=(Ld-Lq)/2。

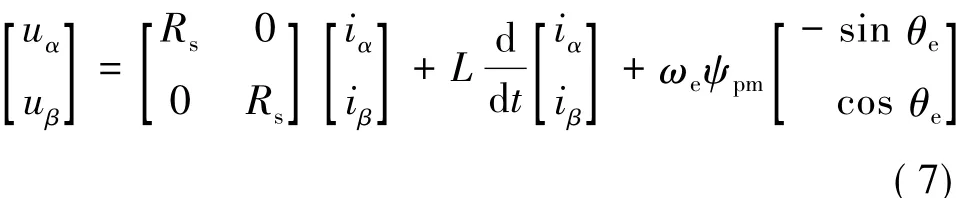
由于表贴式PMLSM交直轴电感近似相等,因此L2≈0,代入式(5)可得:定义电感常数L=L1,并将式(6)代入到式(4)中可得:这样电机在α,β坐标系下反电动势可以表示:
2 PMSLM无位置传感器控制
2.1 滑模观测器设计
根据式(7),以定子电流为状态变量,借助滑模变结构控制方法,利用PMSLM的数学模型,建立电机位置的滑模观测器,可得电流方程:

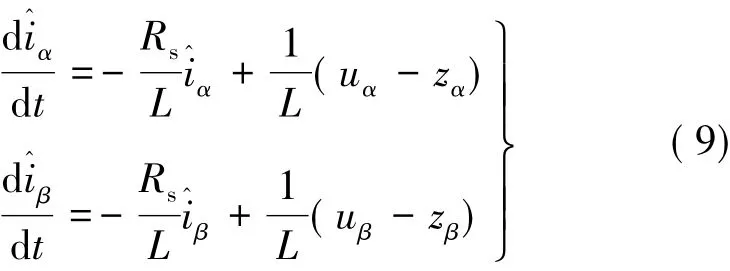
式中:zα和zβ为估算电流和实际电流差值的开关函数,定义如下:

式中:k为常数。为了保证滑模观测器的稳定性[21],k需要设置得足够大,然而k值增加会增大磁极位置的抖振。为了充分抑制抖振,假定在很小的一段时间内,电机的速度基本不变,给出如下自适应规律[21]:

将式(8)和式(9)比较可知,当估算的电流跟随电机实际电流时,采用低通滤波器进行滤波处理,可以得到反电动势估算值

式中:ωc为低通滤波器的截止频率。根据α,β坐标系下反电动势与电角度之间的关系,可以得到电角度的估算值:
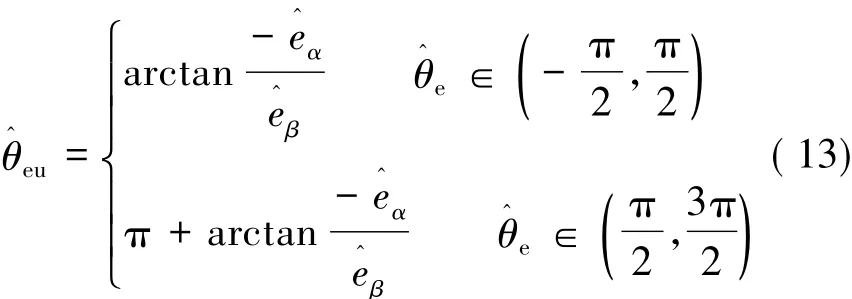
低通滤波器会导致实际位置与估算的磁极位置有一定的相位延迟。为了补偿这个相位延迟,引入补偿角Δθ,对估算的磁极位置进行补偿,并对2π求余,得到最终的磁极位置角

2.2 改进的锁相环
在得到磁极位置角之后,对θ^e微分就可以得到电角速度的估算值。然而,经滑模观测器得到的电角度估算值存在一定的抖振,因此在对其求微分过程中会出现电角速度的估算值在正负之间振荡的情况。常见的方法是对电角速度的估算值进行低通滤波,这样可以得到平滑估算速度。而低通滤波器的引入势必会引起控制系统的相位滞后,从而影响整个控制系统的动态性能。
锁相环是解决速度响应滞后的一种方法,其结构如图1所示,该方法能消除估算位置角抖振造成速度跳变等对系统带来的不利影响。

图1 传统锁相环
由于估算的位置角的变化范围为[0,2π],而电角速度积分得到电角度变化范围为[0,∞),比较器两端数值不匹配,为此需对两端位置角进行处理。
传统方法是将估算得到的电角度进行累加处理,如下式:

由于PI调节器和估算电角速度积分的关系,反馈位置角会滞后于估算位置角,可能造成两者偏差较大或者溢出,进而导致锁相环PI调节器的饱和。为了避免锁相环PI调节器的饱和,降低速度估算的脉动,减少估算速度的误差,可以将估算的位置角与反馈位置角分别对2π求余,这样处理后位置角的变化范围为[0,2π),从而估算的位置角与反馈位置角偏差的变化范围为(-2π,2π)。相比传统锁相环PI调节器,改进的锁相环PI调节器饱和现象得到一定的遏制。改进的锁相环结构图如图2所示。

图2 改进的锁相环
2.3 无位置传感器矢量控制系统
图3 给出了基于改进锁相环型PMSLM无传感器控制系统框图。
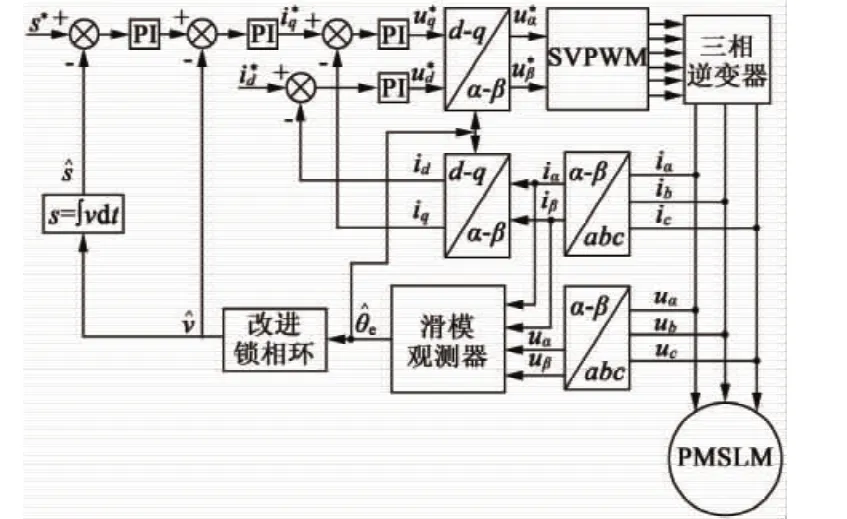
图3 基于改进锁相环型PMSLM无传感器控制系统框图
3 仿真研究
为验证滑模观测PMSLM无位置传感器控制策略的正确性,利用MATLAB/Simulink对传统以及改进锁相环算法进行了仿真。表1给出了PMSLM的性能参数。设定初始负载阻力为200 N,在0.3 s时突加到500 N。

表1 PMLSM参数
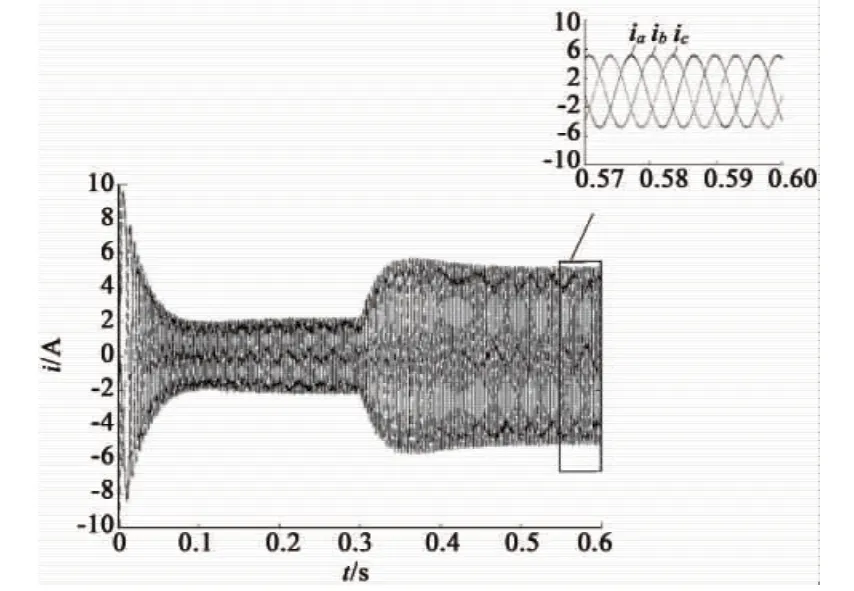
图4 三相电枢电流波形

图5 交直轴电流波形

图6 电磁推力波形
图4 、图5和图6分别为在突加负载过程中的三相电枢电流、交直轴电流和电磁推力波形。从图4中可以看出,三相电枢电流对称且波形正弦度较好。负载阻力从200 N增加到500 N时,交轴电流能够响应负载阻力的变化,交轴电流的增加引起电磁推力的增加,从而能够保证系统的速度稳定。
图7和图8为估算的磁极位置与实际位置以及估计偏差的波形。无论电机处于加减速或者突加负载的情况,估算的磁极位置都能够跟随电机的实际位置。由于滑模观测器估算磁极位置算法存在一部分微分和积分环节,因此估算的磁极位置会滞后于电机的实际位置,导致实际位置在0和360°之间切换时,两者的偏差达到最大。从图7中可以看出,估算的磁极位置存在一定的抖振,整体而言,滑模观测器具有较好的观测效果,观测误差较小。
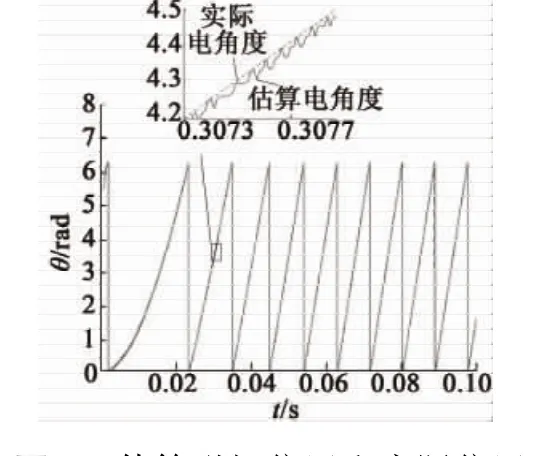
图7 估算磁极位置和实际位置

图8 磁极位置估计偏差
为了验证改进锁相环在速度估算方面的优势,图9和图10给出了两种速度估算算法在电机起动阶段速度估算方面的差异。从图9中可以看出,传统锁相环控制算法在电机起动阶段可能会出现倒溜,估算电角度和锁相环反馈得到电角度之间误差会达到极大值,引起锁相环的PI调节器饱和,从而可能造成电机起动失败。而采用改进的锁相环速度估算算法,两者误差的最大值为2π,能够避免PI调节器饱和。图10(b)与图9(b)相比,改进锁相环的速度估算偏差明显降低。
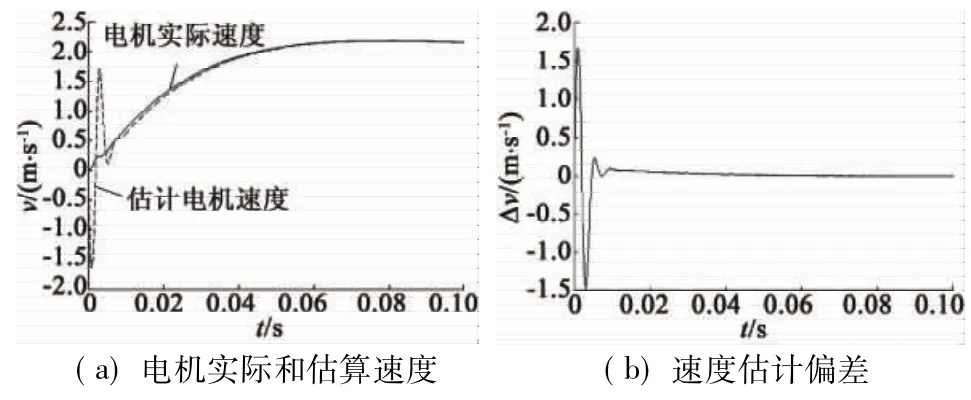
图9 传统锁相环速度比较

图10 改进锁相环速度比较
4 实验验证
本文搭建了基于滑模观测器的PMSLM实验平台,如图11所示。PMSLM通过滑轮与砝码相连,砝码和滑轮组成PMSLM的负载。硬件控制系统包括电源模块、电压电流采样模块、DSP模块、信号处理模块和功率器件模块等。电压传感器采用LEM公司的LV25-P,电流传感器采用LEM公司的CAS6-NP,功率器件采用英飞凌的FF300R12ME4。

图11 电机控制系统
实验中,采用光栅尺WTB1-0550-MM,将获得电机实际的磁极位置与估算的磁极位置进行比较。设置PWM调制频率为10 kHz,滑模观测器观测频率为20 kHz,电机的实际参数与仿真参数一致,如表1所示。
图12~图14是电机在额定速度(2 m/s)、额定负载阻力(500 N)、直流侧电压500 V下采用滑模观测器算法的三相电枢电流、磁极位置和电机速度的波形。从图13、图14中可以看出,采用滑模观测器估算得到的磁极位置和电机速度能够跟随电机的实际磁极位置和电机速度。在额定速度、额定负载阻力下,滑模观测器观测估算的磁极位置和电机速度波动较小,三相电枢电流波形正弦度较好,从侧面也反映电机输出的电磁推力较平稳,从而保证整个控制系统的稳定性。
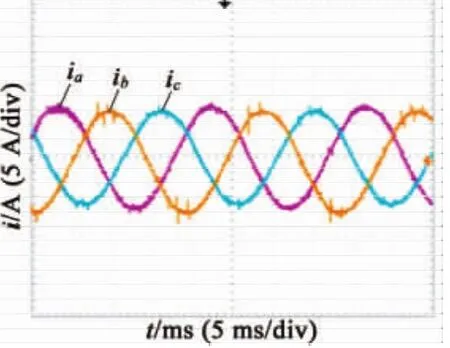
图12 三相电枢电流实验波形

图13 实际和估算磁极位置

图14 实际和估算电机速度
5 结语
针对滑模观测器抖振会造成估算电角速度误差较大的问题,本文提出了在利用滑模观测器估算PMSLM磁极位置基础上,引入一种新型的锁相环结构,对滑模观测器估算得到的磁极位置进行闭环控制,得到平滑的电机速度信号。
该方法能消除估算位置角抖振所造成的速度扰动等因素对系统动态响应的影响。仿真和实验结果均表明,基于滑模观测器的改进型锁相环永磁同步直线电机无位置传感器矢量控制策略,能够实现对磁极位置和电机速度的准确估计,同时具有良好的响应特性。
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2021年4期)2021-07-28
电动工具(2020年4期)2020-08-20
物理之友(2020年12期)2020-07-16
计测技术(2020年6期)2020-06-09
电子制作(2019年15期)2019-08-27
宇航计测技术(2018年3期)2018-09-08
幼儿教育·父母孩子版(2017年9期)2017-11-15
汽车与新动力(2015年1期)2015-02-27
舰船电子工程(2014年3期)2014-11-23
