改进的基于BM3D的图像去噪算法
2019-04-08 00:46黄丽姝马铭志
现代计算机 2019年6期
黄丽姝,马铭志
(四川大学计算机学院,成都610065)
0 引言
近年来,随着计算机、手机等电子设备的大力发展,对图像处理的需求日渐升高,数字图像处理也成为广大研究者的研究重点领域。众所周知,图像在生成、传输等过程中不可避免会受到设备、传输途径、环境等因素的干扰,导致图像被噪声污染,图像质量下降,给后续的图像处理过程带来了难度。一个好的去噪算法能够帮助我们获得图像的准确信息,加大后续图像处理的精度与准确度,因此,图像去噪有着重要的现实意义。
图像在生成时,由于设备、环境、电子器件的原因,所含的噪声都是随机的,因此,不能简单地使用传统的去噪算法进行处理。好的去噪算法除了能去除噪声影响之外,还应该能较好地保持图像结构,不至于丢失过多的图像细节。
常见的图像去噪的算法主要分为三类:第一类为基于空间滤波的去噪算法,该类算法利用目标像素邻域特性进行去噪,如常见的均值滤波等、高斯滤波等;第二类为基于变换域的去噪算法,该类算法基本思想是将图像变换到频域空间,然后对频谱系数进行诸如系数收缩、阈值处理等,再通过相应的反变换到图像域,以此达到滤波的效果,例如经典的小波去噪算法;第三类为基于噪声的统计模型,该类算法在已知图像噪声统计模型的前提下,利用局部区域灰度值的估计来计算中心像素的估计值,如基于极大似然估计的去噪算法。针对大多数图像中存在复杂且未知的噪声,提出改进的BM3D算法,针对图像中复杂的随机噪声模型,使用VST变换实现噪声的方差统一,使后续BM3D算法有更好的效果。
由于图像噪声复合的特殊性和复杂性,单纯的BM3D算法处理的效果不够理想,出现了细节丢失、模糊等现象。本文根据以上情况,提出了一些改进措施:针对图像存在的随机噪声一般为复合噪声,我们对图像采取VST变换,得到方差均匀稳定的含噪图像,然后对含噪图像进行改进后的BM3D算法做进一步处理。
1 噪声处理
1.1 维纳滤波
维纳滤波是一种基于最小均方误差准则、对平稳过程的最优估计器,它假定输入是有用信号和噪声信号的合成,根据最小据方差准则求得最佳参数,它是一种自适应滤波器,根据局部方差来调整滤波器效果。
对于一个像素邻域为a*b的图像,经过维纳滤波后的滤波估计为:

上式通过对图像的每个像素邻域的均值和方差来实现去噪,其中,μ为局部均值,而ϑ2为噪声方差,现实中,我们很难获得噪声方差,因此,在现实的随机噪声图像下,我们以各个像素局部估计方差的近似处理噪声方差,公式中,每个像素邻域M为a*b,则局部均值可表示为:
在BM3D算法的最终估计时,使用维纳滤波取代硬阈值,能够更好地保护图像的边缘细节,在已经进行过初步估计的前提下,使得在去噪的同时达到了保留细节的效果。
1.2 VST(方差稳定)变换
由于随机噪声并非单纯的高斯白噪声,直接使用BM3D算法进行去噪效果不佳,为了能使BM3D能在自然图像去噪上取得较好的效果,采用由Foi在2011年提出的方差稳定的方法(VST)得到方差分布均匀的噪声,然后用改进的BM3D方法对同方差的噪声图像进行处理,最后将图像进行方差稳定的逆变换得到去噪图像的无偏估计。
假设含噪图像为D,去噪后图像为D’,本为所述的BM3D算法为BMSD’,则,算法过程可概括为下式:

其中,σl为随机噪声标准差,σV为经过VST变换后的标准差,VST-1为VST的逆变换,通常情况下,σV稳定到1。经过上述变换后,将图像的噪声简单的看成是加性噪声,此时,可以使用BM3D算法进行去噪。
2 基于改进BM3D的图像去噪算法
BM3D算法即三维块匹配算法,是一种根据图像块间的相似性进行去噪的三维滤波算法。其算法主要思想为:将具有相似性结构的二维图像块组合成三维的图像块组,利用联合滤波对这个三维数组进行去噪处理,从而得到滤波后的图像。算法主要分为初步估计和最终估计两个阶段,在传统算法的初步估计后我们将得到的残差图的一部分加入到初步去噪的图像中,再进行第二步的最终估计。算法流程可可简化为图1所示步骤。
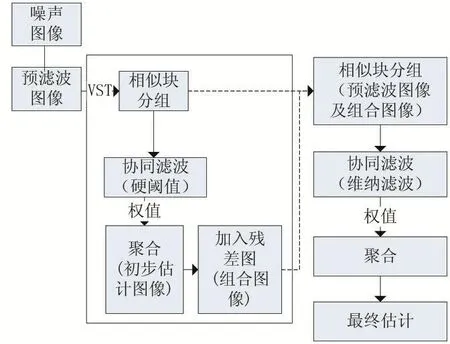
图1
2.1 初步估计
将待去噪的噪声图像I分成若干图像块,确定合适的步长h(为了一定程度上减小算法复杂度,本文选取的步长为3个像素),选取一些大小为k×k的参考块,在搜索范围内寻找若干相似块并将其(包括参考块自身)聚合成为一个三维矩阵,寻找过程以欧氏距离作为图像相似性的度量,此过程可以简单的描述为:

其中,p为参考块,S(p)为相似块聚集而成的三维矩阵,d(p ,q)为参考块p与相似块q之间的欧氏距离,表示为:
在经过上述过程后,对所得的三维矩阵S(p)进行三维变换,并用硬阈值进行系数收缩,然后通过反变换得到初步处理后的图像,该过程可用下式表达:

上式中T1、T2为三位变换中的一维和二维变换,令Thard代表第一维和二维变换,上式可简化为:

其中:
经过上述步骤后,每一个图像块都经过了初步的去噪处理,通过加权平均对有重叠的图像块进行重新估计的结果为:

2.2 加入残差图后的最终估计
在进行完第一步以后,我们得到了去噪图像I'的初步估计,本文认为进行完第一步后的滤波噪声,包含了图像的部分细节信息,为了进一步提高算法的精度,我们将第一步滤波过后的部分残差图添加到滤波图像中,即向初步估计的结果中加入噪声反馈,将得到的新的图像再进行最终估计。
此过程可以简单的理解成为将滤波图像和噪声图像进行加权平均,组合得到新的图像,新图像可表示为下式:

其中I为原始含噪图像,Inew为所得新的组合图像,δ为一个参数,表示噪声图像在新图像中所占比例为δ。
将所得的组合图像进行分块,步骤类似于初步估计,选定参考块,并将与参考块相似的图像块组合成为相似块组S(p)',对这个新的三维矩阵及噪声图像的三维矩阵S(p)进行一维变换及二维变换,本文使用DCT变换,与第一步初步估计不同,此处利用第一步基础估计的权值用维纳滤波对三维变换的矩阵进行系数收缩,然后通过逆变换得到各图像块的最终估计值。最后,将所有的图像块根据维纳滤波后得到的权重融合到原来的位置,得到最终的去噪图像。
2.3 结果分析
为进一步验证算法的实际有效性及处理效果,本文采用PSNR(峰值信噪比)作为评价体系,肉眼所见的去噪效果为辅助评价指标,对本文改进算法与原算法及现今去噪效果较好的几种算法进行比较。对于A、B分别为去噪前后的图像,则:

为了评价本文算法在包含一定随机噪声的图像上的真实表现,我们选取常见的Lena图像(见下图1)作为实验图像,对比算法包括NLM算法、TV算法、BLSGSM算法及本文所提的改进BM3D算法(下均成为VBM3D算法)。
我们以两张被噪声不同程度污染,模拟噪声较小以及噪声较大两种情况,实验所得四种算法的处理时间和PSNR如表1所示。
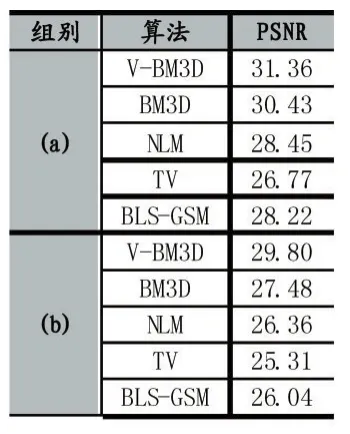
表1 算法PSNR对比
实验结果分为两组,(a)各算法的处理时间及PSNR可由表中可看出,四种算法中,本文改进的算法获得了最高的PSNR,其结果对比其他三种算法质量更高,PSNR最低的为TV算法,从处理效果来看,TV算法去噪效果最差,本文改进的算法在噪声去除以及细节保持上都取得了最好的效果,(a)组的处理效果如图2。

图2 (a)组处理效果图
当图片质量较差时,同样将几种算法的处理结果进行了比较。虽然相较于(a)组,(b)图片的去噪效果明显有所下降,但在表中所列的几种算法中,本文的改进算法去噪效果优于其他几种算法,同时在PSNR的保持上也有不错的效果。处理结果见图3。
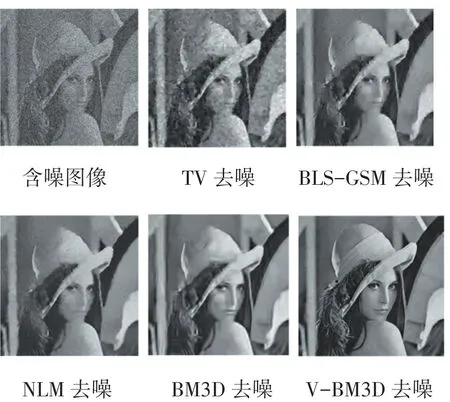
图3 (b)组处理效果图
由上述两组图看出,改进的算法在图像的处理结果及PSNR上都保持了良好的结果,这与理论预期相符,即使在图像质量较差的条件下,本文算法也能取得较好的处理效果。
3 结语
本文依据噪声不单一存在的特点,提出了针对当前去噪效果最好的BM3D算法的改进,首先通过方差稳定性变换,得到方差均匀稳定的含噪图像,使得常见算法对于图像的噪声处理有更大用处,同时提高改进算法的后续去噪能力,然后通过向第一步滤波图像中加入残差图,降低图像细节的损失,再通过BM3D算法的第二步,将组合图像和噪声图像同时进行相似块分组,得到去噪图像的最终估计。
由于BM3D算法在相似块的寻找和匹配上时间复杂度较高,因此改进后的算法在处理时间上不够理想,针对图像随机噪声的有效去除这一问题,实验结果并未得到大幅度的提高。在今后的研究中,将进一步研究如何提高算法的执行效率,并保持算法的处理效果,使得该算法能够在一定的时间范围内发挥其效果。
猜你喜欢
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09
舰船科学技术(2021年12期)2021-03-29
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年9期)2019-05-30
劳动保护(2019年3期)2019-05-16
科技视界(2018年3期)2018-04-02
初中生世界·九年级(2017年10期)2017-11-08
中学生数理化·八年级数学人教版(2016年5期)2016-08-23
中学生数理化·八年级数学人教版(2016年5期)2016-08-23
饮食科学(2016年7期)2016-07-27