
车辆动态响应检测数据里程偏差二次修正快速计算方法
2019-08-19 10:25秦航远刘金朝王卫东孙善超
中国铁道科学 2019年4期
秦航远,刘金朝,王卫东,孙善超
(1.中国铁道科学研究院,北京 100081;2.中国铁道科学研究院集团有限公司 基础设施检测研究所,北京 100081)
基于高速综合检测列车和轨道检测车等先进轨道检测设备以及数据分析手段,铁路研究及技术人员能识别轨道上存在的病害问题,如轨道的几何不平顺、波浪形磨耗、剥离掉块、焊缝不良等,并及时反馈给一线安全维护人员,及时排除安全隐患,对降低维修成本及保障旅客安全起到重要作用[1-2]。
然而,无论是以激光扫描和图像处理为主要技术手段的轨道几何检测(Track geometry measurement, TGM)技术[3],还是基于轴箱振动加速度(Axle-box acceleration, ABA)或轮轨力(Wheel-rail force, WRF)的车辆动态响应检测(Vehicle dynamic measurement, VDM)技术,均存在一个普遍问题即检测里程与真实里程间存在差异。高速综合检测列车和轨道检测车等采用车轮转动速度推算列车行驶里程,由于硬件设备及数据采集软件的不同,TGM与VDM系统采用各自独立的里程作为检测数据的空间坐标,同时每隔一定间隔(约为5 km)采用TGM系统里程对VDM系统里程进行校准。通常TGM与VDM系统的检测数据里程偏差来源于以下5个方面:①车轮轮径由于磨耗及镟轮而逐渐减小,若未及时更改轮径参数,将导致系统计算的车轮周长与车轮实际转动1周走过的距离产生偏差,进而导致检测里程产生偏差;②列车行进过程中,由于车轮横移或摇头等原因导致车轮实际滚动圆与名义滚动圆产生偏离,进而导致里程累加出现误差;③检测列车进入隧道等特殊区段时,由于GPS卫星定位系统无法正常工作而产生里程偏差;④由于信号传输延迟及测量误差等不可抗的原因导致里程偏差;⑤由于硬件及软件因素,以及不同系统操作人员的人为因素(如系统参数设置不同等),TGM与VDM系统在每次里程校准的间隔不可避免地产生里程偏差。目前,已有的TGM数据里程偏差修正方法由于计算效率问题无法满足大规模数据工程分析的需要,且针对VDM数据里程偏差的修正方法还未见报道,因此铁路维护部门对轨道检测数据里程的修正还经常依赖于人工操作,效率低且其准确性在很大程度上依赖于人员的个人经验及工作能力。
针对TGM数据里程偏差的修正主要有2类方法:①以轨道上行进设备的真实里程为基准修正的绝对里程坐标修正方法;②以某一次TGM数据为基准修正的相对里程坐标修正方法[4]。在绝对里程坐标修正方法研究方面,文献[5]在检测车经过的关键设备信息的基础上建立优化模型以减小第一类里程偏差,并建立了关键设备自动识别模型,对各个采样点的里程进行修正。文献[6]基于差分全球定位系统(Differential global positioning system,DGPS)与计算机视觉技术,研究惯性导航系统因环境变化导致GPS系统受限的情况下的里程定位问题。文献[7]提出了递归多尺度相关平均算法,并成功用于道路粗糙度检测数据的处理及里程偏差修正。在相对里程坐标修正方法研究方面,文献[8]根据2个不平顺指标(曲率和轨距)的检测值,利用互相关分析技术按特定长度间隔确定本次检测数据相对于前次检测数据的里程偏差,并修正本次检测数据特定长度区段内所有检测点的里程。文献[9—10]以参考检测数据为基准,依据前后2次检测数据一定范围内采样点幅值平方差最小的准则,通过优化模型确定待校数据单元区段相对于参考数据的里程偏移量,实现里程校准。文献[11]基于同一段轨道区段上多次获得的TGM数据之间的关系提出根据历史检测数据修正里程的方法。文献[12]基于2次获得的TGM数据中轨距高度相关的事实,利用互相关分析、自回归移动平均模型、蒙特卡洛模拟、卡尔曼滤波方法,提出以前一次检测数据校准本次检测数据的方法。然而,这些文献中涉及的以关键设备或以历史检测数据作为参考信息对新检测到的轨道几何数据进行里程偏差修正,均需要通过逐点计算目标函数、再取目标函数极值的方法得到最佳匹配位置,因此存在计算量偏大的问题。然而,随着铁路网的高速建设以及轨道检测监测体系的逐步完善,每月产生的轨道状态检测数据量日益呈现飞速增长的局面,导致上述方法无法满足工程分析的需要。此外,目前的轨道检测监测体系涉及的里程偏差修正方法主要以线路实际和实测TGM数据进行,而VDM数据未包含里程偏差修正所需相关参考信息,为了综合TGM与VDM数据对轨道状态进行分析研究,有必要对两类检测数据的里程信息进行同步校准,因此,需要研究针对基于TGM数据的VDM数据里程偏差修正方法。
本文提出基于函数极值点快速提取的五点迭代法(Five-Points Iteration Method, FPIM)用于快速提取相关系数最大值,并以此为基础构建基于TGM数据的VDM数据里程偏差二次修正模型。该模型采用线路实际曲率、里程及实测曲率对实测轨道几何检测数据里程偏差进行一次修正,以里程偏差修正后的轨道几何检测数据为基准,进一步结合未修正的车辆动态响应检测数据速度对实测车辆动态响应检测数据里程偏差进行二次修正。通过对比传统逐点计算方法与FPIM的计算效率,结合轨道病害现场上线复核验证FPIM的可行性和准确性。
1 VDM数据里程偏差修正流程
前述的TGM数据里程偏差修正2类主要方法中,绝对里程坐标修正方法是基于台账数据里程信息(即铁路管理部门登记在册的线路详细资料)的获取,实现待校里程与真实里程之间的绝对偏差修正,若无台账数据里程信息时该方法无法使用;而相对里程坐标修正方法是以某一次检测里程为参考里程进行里程偏差修正,可实现2次检测数据之间的相对里程偏差修正,但当参考里程与真实里程存在偏差时则其绝对里程偏差依然存在。
用于评判轨道状态的检测方式包含TGM及VDM,分别应用于轨道的中长波(波长范围为2~150 m)及短波(波长小于1 m)不平顺检测。由于VDM数据中缺乏与台账信息相呼应的检测数据(如曲率、超高等)用于里程偏差修正,因此可以借助里程准确的TGM数据为参考对VDM进行里程偏差修正。VDM数据里程偏差的二次修正流程如图1所示。

图1 VDM数据里程偏差二次修正流程
由图1可以看出:TGM数据包含线路实际里程及曲率,采用基于FPIM的绝对里程坐标修正方法,建立一次里程偏差修正模型,进行一次里程偏差修正;同一次检测得到VDM与TGM数据中的速度之间存在高度相关性,因此,根据一次修正后的TGM数据里程,采用基于FPIM的相对里程坐标修正方法,建立二次里程偏差修正模型,实现VDM数据的二次里程偏差修正。
2 五点迭代法FPIM
逐点计算方法通过逐点扫描并计算各点相关系数,最后求其最大值的相关性分析方法能够求出参考里程与待校里程的相对里程偏差,从而对待校里程进行偏差修正,其计算公式为
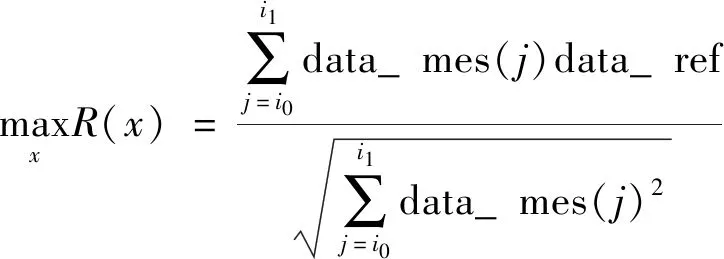
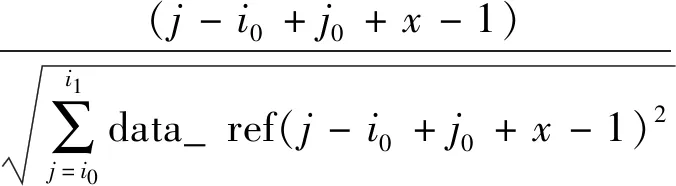
s.t.j0≤x≤j1-(i1-i0)
(1)
式中:R(x)为相关系数;x为待校里程采样点编号;data_mes(·)为待校里程与里程均值之差;data_ref(·)为参考里程与里程均值之差;j0和j1分别为参考里程首尾点编号;i0和i1分别为待校里程首尾点编号。
由式(1)可知,假设待校里程点数为N,则每一次计算R(x)时需要3N+1次乘法、1次除法以及2次开方计算;假设参考里程相较待校里程前后沿拓M个点,即共N+M个点,则每一次相关性分析时共需要(M+1)×(3N+4)次运算。可见,逐点计算方法存在计算效率较低、无法满足大量数据工程分析的要求的缺点。
鉴于待校里程与参考里程波形一致性较高、导致两者相关函数多为凹函数的特征,提出采用FPIM进行里程偏差修正;同时考虑到实测数据在个别情况下存在数据不全和不确定的干扰等情况,有必要结合阈值判断与适当增加采样点个数的方法对其进行修正。以下以TGM数据里程偏差修正为例对该方法进行说明。利用FPIM寻找实测里程与参考里程的最佳匹配位置,并对实测里程进行精调的具体操作分为4步,具体为:①选取某一曲线区段作为初始区段;②在该区段上均匀选取5个点,计算各点处相关系数;③寻找上述5个点中相关系数最大点;④更新区段,若最大点不为所选第1或最后一点,则新区段为所选取点中最大点前后两点间的区段,重复②和③的操作直到更新后区段的长度不大于5,其中后续每步中的新区段中第1、第3和第5这3个点均已在上一步计算,在下一步计算中可以省去,实际只需计算其他2点;若最大点为第1或第5点,则新区段为该点与所选取5点中该点前(最大点为第5点)或后一点(最大点为第1点)。
由于有时存在数据缺失或干扰的情况,并导致参考与待校数据波形匹配不理想,因此,会造成互相关函数未呈现凹函数性质的情况,从而具有多个极值点。FPIM针对这一问题提出了解决方案:先设定相关系数阈值,当某次计算的相关系数最大值小于该阈值时,须在该区段内取点数翻倍,继续搜索,直到最大相关系数大于该阈值;进而取相关系数最大值点前后两搜索点间的区段为新的搜索区段,后续计算流程与前述的4步操作一致。若取点数翻倍n次(取n=5)后仍无采样点相关系数超过阈值,则视该待校里程区段在参考里程区段无匹配点,取修正量为0。对于借助曲率信息进行的里程偏差修正,将阈值设为0.6,对于借助速度信息进行的里程偏差修正,将阈值设为0.9。
FPIM的计算流程如图2所示。图中:m为等间隔取点的个数;T为互相关阈值,T∈[0,1]。
3 VDM数据里程偏差修正模型
3.1 一次里程偏差修正模型
TGM数据包含各项轨道几何参数(轨距、轨向、曲率、高低、超高等)的时间历程信号以及里程同步定位系统接受的里程信号。一次里程偏差修正模型以TGM数据为对象利用线路实际曲率和里程以及实测曲率自动识别曲线的头尾,并将实际曲率和里程及实测曲率的波形分段,之后通过相关性分析对各曲线段进行里程偏差修正,最后通过插值方法对全线路里程进行修正并对长短链位置进行修正,其具体计算流程如图3所示。
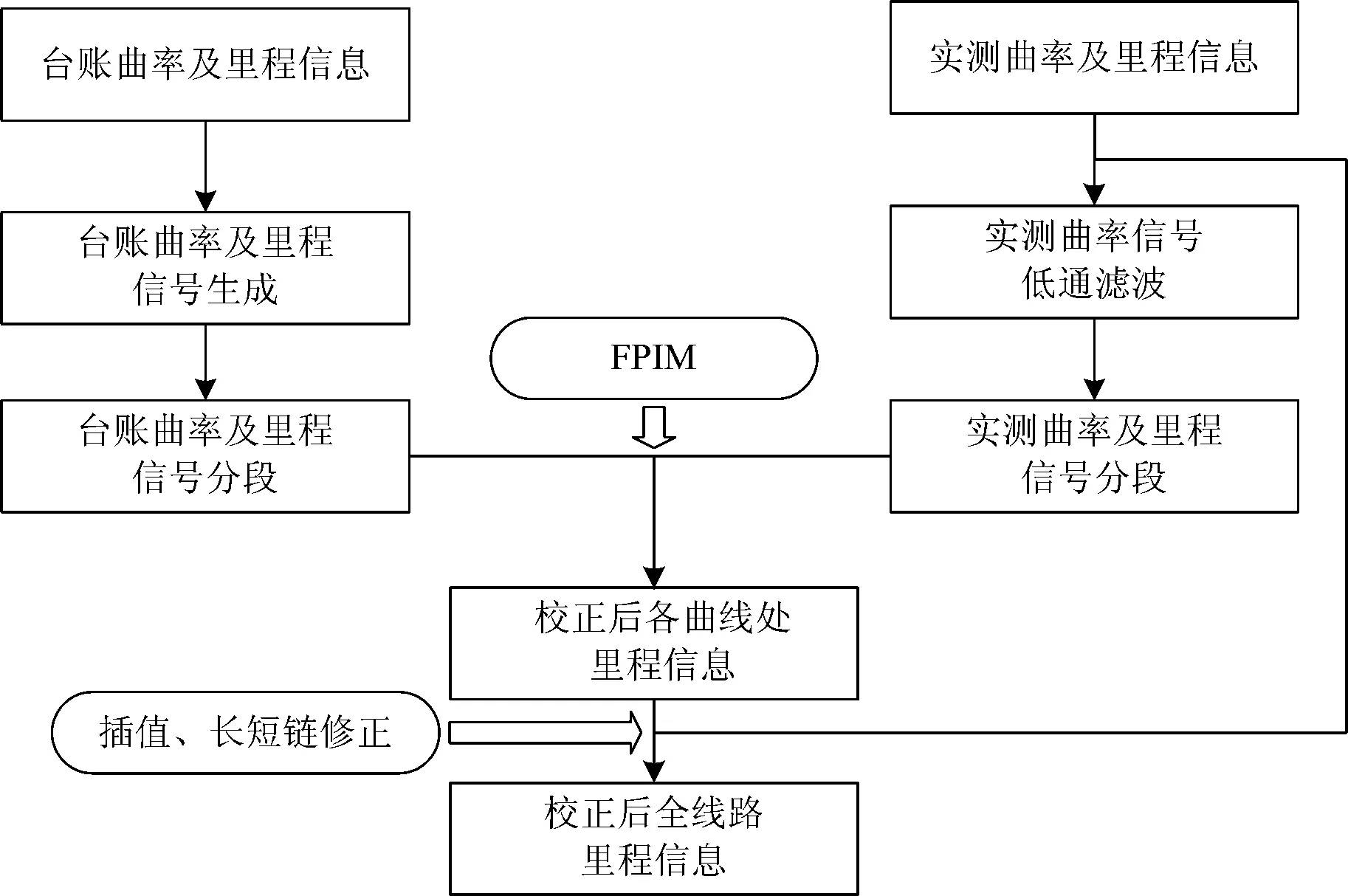
图3 一次里程偏差修正流程图示
详细算法可以描述如下。
步骤1 线路实际里程及曲率波形数据生成
根据线路实际的里程及曲率信息(包含曲线头尾里程、曲线半径、缓和曲线长度等),生成实际里程波形mile_ref及曲率波形curve_ref,里程信号间隔步长取为0.25 m。
步骤2 实测信号滤波
对实测曲率波形curve_mes_0进行低通滤波,保留趋势项,记为curve_mes。
步骤3 参考及实测曲线信号分段
利用实际里程波形mile_ref及曲率波形curve_ref提取线路中的曲线段(即参考曲线段)作为里程偏差修正的参考信息,它可由单条曲线组成,也可由多条相邻很近的曲线组成;首先识别曲线头尾,当前一段曲线结束里程与后一段曲线起始里程差值大于阈值(取3000 m)时,将它们划分成不同的区段,否则视2段曲线波形为1段数据。
对参考曲线段两端进行延拓,则参考曲线段其间的曲率值大于阈值thresh_elv,延拓窗内台账曲率等于0,结合参考曲线段头尾的实际里程确定curve_mes中的实测曲线段。要求实测曲线段前后沿拓区段内曲率最大绝对值小于阈值thresh_elv的0.2倍,同时实测曲线段前后的沿拓长度不大于参考曲线段沿拓长度1/3,否则需要对其进行延拓或压缩处理。
步骤4 相关性分析
在每个区段内,利用FPIM对采样点进行扫描并计算等长度实测曲线段与参考曲线段的相关系数。取相关系数最大处为最佳匹配点,若相关系数大于0.6,则将参考曲线段里程赋予实测曲线段,否则视该实测曲线段不满足修正要求,记里程偏差修正量为0。
步骤5 长短链修正
将长短链嵌入到里程中,并通过修改长短链区域内采样点的步长间隔,再次对里程进行修正。
步骤6 实测里程插值
在各曲线段里程偏差修正的基础上,通过插值计算实现对全线的里程偏差修正,对于2个端点则按0.25 m的间隔进行延拓。
3.2 二次里程偏差修正模型
VDM系统(包含ABA与WRF检测系统)通过采集车辆动态响应信号,识别轨道上存在的短波病害特征。由于VDM数据不包含台账信息所包含的相关数据(如曲率、超高等),无法采用绝对里程偏差修正法进行修正,需要采用相对里程偏差修正法。因此,基于同一次TGM与VDM数据中速度信息的高度相关性,选择利用修正后的TGM数据速度对VDM数据进行里程偏差修正。
二次里程偏差修正方法总体与一次里程偏差修正方法相似,其中信号低通滤波、相关性分析、里程插值均可参考3.1节相应的操作步骤。不同之处有以下2点。
1)在待校VDM数据速度波形生成前对其进行预处理
VDM系统为等时间间隔采样,以ABA检测数据为例,其采样频率通常为2 000 Hz。VDM数据里程根据四舍五入按0.25 m等间隔记录,因而每0.25 m可能包含多个采样点。而TGM系统为等距离采样,采样间隔0.25 m,因此每0.25 m只含1个采样点;基于速度数据不会发生突变的前提,将ABA里程及速度信息按每0.25 m提取1个点,生成与TGM系统同数据量的信息。
2)以速度变化率为基准,参考TGM数据与待校VDM数据的速度波形进行里程分段
为了对VDM数据的里程进行分段,首先计算速度变化率,并提取速度变化率超过给定加速度阈值的区段,从而实现列车加速和减速里程区段的定位;然后通过判断VDM数据各相邻两加速或减速里程区段里程间隔是否大于里程阈值(取10 km)对其进行分段,当大于该阈值时将数据划为不同区段,否则视其为同一区段。
4 算例验证及分析
4.1 FPIM的准确性验证
采用逐点计算方法与FPIM分别计算某次TGM数据待校里程区段的相关系数,二者比较的结果如图4所示。由图4可以看出:采用逐点计算方法时相关系数包含3个极大值点;采用FPIM,第1次迭代后未找到相关系数大于0.6以上的采样点,增加采样点数为10个即点密度增加后第2次迭代最大值大于0.6,并最终计算得到相关系数的最大值点,其修正结果与逐点计算方法完全一致。

图4 逐点计算方法与FPIM求解相关系数最大值结果对比
该区段里程偏差修正前后的曲率波形如图5所示。由图5可以看出:由于数据的缺失,导致实测曲率波形在K32+400(修正前)处前无数据信息,这也是该处相关系数呈现图4特征的原因;通过FPIM进行里程偏差修正后,该处曲率与参考曲率基本吻合,说明FPIM能够适应多种复杂工况下的里程偏差修正问题,实现了计算的准确性。

图5 FPIM对于里程数据丢失情况的计算结果
4.2 FPIM的快速性验证
分别采用逐点计算方法和FPIM对不同里程长度的高速综合检测列车TGM数据进行里程偏差修正,根据计算时长验证FPIM的快速性;所选TGM数据里程范围分别为60,100,200,300,400,500,600,700和800 km。
修正的效果不会随里程范围变化而变化,为图片显示清楚选择用里程最短的60 km数据说明。里程范围为60 km时TGM数据里程偏差修正前后曲率与参考曲率的对比结果如图6所示。

图6 里程范围为60 km时TGM数据里程偏差修正结果
由图6可以看出:里程范围为60 km时,采用逐点计算方法与采用FPIM得到的里程偏差修正后曲率波形完全重合,且与参考曲率波形高度一致。
不同里程范围时采用逐点计算方法和FPIM得到的计算时间对比见表1。由表1可以看出:里程范围为60 km时,采用逐点计算方法计算所用时间为20.71 s,而采用FPIM计算仅需2.32 s,时间节省率约为89 %;随着里程的增加,FPIM计算效率逐渐上升,这是因为里程越长曲线区段越多,根据曲线区段进行相关性分析所占时长在里程偏差修正中的比例逐步增加,则采用FPIM时所节省的时间也随之增加,使整体计算效率随之提高。

表1 不同里程跨度FPIM修正计算效率对比
综上,采用FPIM可在保证里程偏差修正准确性同时显著提高计算效率,为大量检测数据里程偏差修正的快速工程分析提供切实可行的手段。
4.3 VDM数据里程偏差修正现场复核验证
某高速铁路局部区域综合检测列车VDM系统测得的ABA数据如图7所示。分析表明,该数据对应里程区段左轨存在波磨,修正前里程区段为K236+943—K237+001,波磨区段长度为58 m。

图7 某波磨区段修正前ABA波形实测范例
借助该区段线路实际里程及曲率信息对同一次检测得到的TGM数据进行一次里程偏差修正。里程偏差修正前后的轨道曲率波形对比如图8所示。
由图8可以看出:该波磨区段位于曲线段内;通过放大图可以看出里程偏差修正后该处里程较修正前有一定的偏离,修正值为+36 m;以此修正值为参照标准对该区段TGM数据里程进行修正,并将里程偏差修正后的TGM数据作为对VDM数据里程偏差修正的参考。
采用一次里程偏差修正后的TGM数据速度对VDM数据进行二次里程偏差修正,修正前后VDM数据的速度波形对比如图9所示。
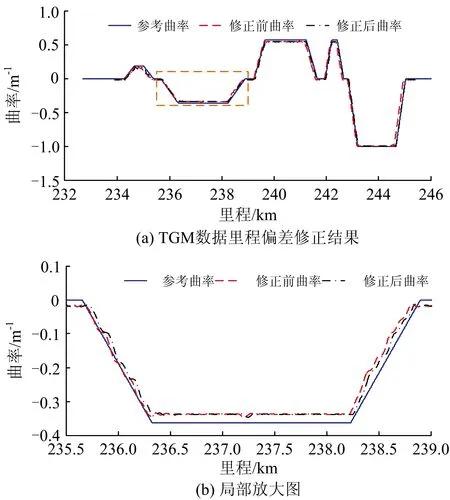
图8 TGM数据里程偏差修正结果
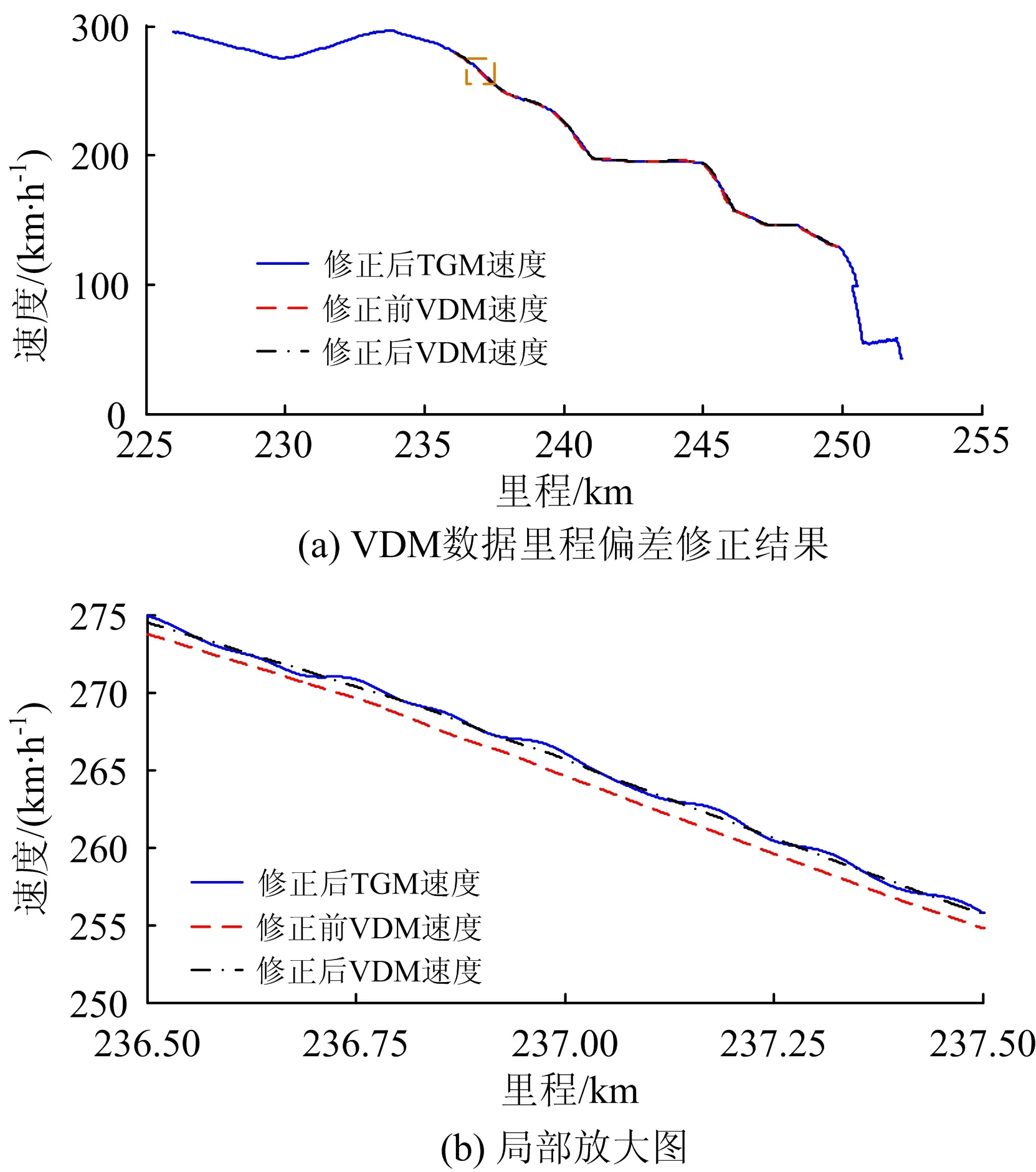
图9 VDM数据里程偏差修正结果
由图9可以看出:在该波磨区段处列车处于减速状态,修正后VDM数据速度波形与TGM系统速度波形吻合度良好,修正量为+61 m。
综合上述里程偏差修正结果,得到的波磨区段里程为K237+004—K237+062。
对该波磨区段进行了现场复核,现场实测里程为K237+007—K237+065,波磨区段现场复核照片如图10所示。通过图10所示光带很容易看出,该区段左轨存在明显波磨特征。
里程偏差修正前左轨垂向ABA响应数据、采用FPIM修正后的对应数据以及波磨小车测得的钢轨表面粗糙度数据对比如图11所示。

图10 波磨区段现场复核照片
从图11可以更清晰地看出:修正前波磨区段里程为K236+943—K237+001,修正后里程为K237+004—K237+062,修正量为+61 m,修正后里程与实际该波磨区段里程K237+007—K237+065相差3 m。这一结果很好地验证采用FPIM进行里程偏差修正的准确性及可行性。
5 结 语
本文以提高计算效率的目的,提出了用于快速进行里程偏差修正相关性分析的FPIM方法;结合线路实际里程及曲率信息、TGM数据曲率和速度信息以及VDM数据速度信息,提出了针对VDM数据里程偏差问题的二次修正方法。通过算例分析和现场复核对上述方法进行了验证,结果表明:采用FPIM可以显著提高相关性分析方法的计算效率,与传统相关性分析方法比较,在保证里程偏差修正准确性的前提下显著节省计算时间达85%以上,为大量检测数据里程偏差修正的快速工程分析提供了一个切实可行的手段;而基于本文FPIM相关性分析的VDM数据里程偏差修正方法有高度的可行性及准确性,实例中修正后的VDM数据里程与真实里程接近,误差在3 m以内,非常有助于VDM数据的分析及后续养护维修工作。
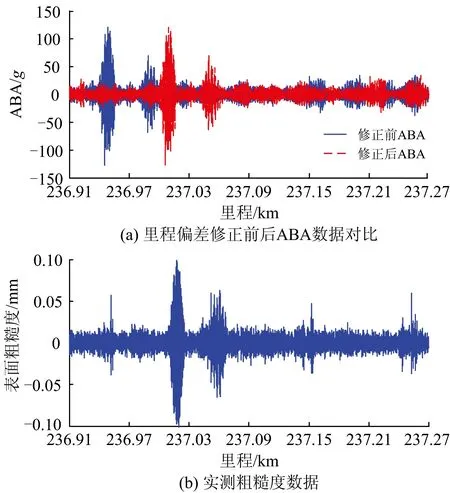
图11 里程偏差修正前后左侧垂向ABA数据与实测粗糙度数据对比
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
昆明医科大学学报(2022年1期)2022-02-28
云南画报(2021年11期)2022-01-18
汽车工程师(2021年11期)2021-12-21
今日农业(2021年7期)2021-11-27
铁道通信信号(2021年6期)2021-07-08
汽车工程(2021年12期)2021-03-08
铁道通信信号(2020年1期)2020-09-21
科技视界(2020年8期)2020-05-18
中山大学学报(自然科学版)(中英文)(2018年6期)2018-12-05
