用于导管架全遍历检测的ROV路径规划
2019-10-28 11:14张利巍常玉连
吉林大学学报(信息科学版) 2019年5期
张利巍, 高 胜, 陈 昆, 常玉连
(东北石油大学 a.机械科学与工程学院;b.电子科学学院, 黑龙江 大庆 163318)
0 引 言
近年来随着遥控潜水器(ROV: Remotely Operated Vehicle)检测技术在海洋油气开发领域的应用, 其作为水下检测设备的运载体, 相比于传统潜水员水下检测方式有着不可比拟的优越性[1-3]。因此可以使用水下机器人对深水目标进行全方位探测与识别, 并进行图像和数据传输, 安全可靠[4]。
目前海洋油气开采进行较深水域(50~250 m)施工时, 其检测方法主要有水下目视检测、水下电位测量、ACFM(Alternating Current Field Measurement)检测(交流电磁场检测技术)、超声波检测、水下射线检测和水下磁粉检测等[5-6]。使用ROV对导管架进行目视检测以确定导管架裂纹、凹坑、移位、孔蚀、大的腐蚀和缺陷等的位置和大小, 并对导管架及所有构件进行拍摄记录。ROV路径规划可分为点到点避障路径规划和完全遍历路径规划两种, 对ROV路径规划的研究中大多数都是针对点到点之间的避障问题进行研究, 研究成果众多且方法非常丰富。如文献[7]提出一种结合视线导航原理与模糊控制算法, 实现机器人在未知环境下进行实时避障的局部路径规划策略;文献[8-10]利用一种改进蚁群算法对水下机器人的作业路径进行规划, 找到了能耗最低路线;文献[11]提出了一种基于禁忌搜索的全局路径规划方法, 该方法通过启发式策略, 采用多重禁忌列表的方式提高了水下机器人全局路径规划效率。而针对完全遍历路径规划的研究较少且算法有限, 目前仅有文献[12]进行了一定的研究和讨论, 并首次提出了使用图论的方法对导管架进行单面简化模型后的全遍历检测。
在实际工程中, ROV检测路线的规划是根据技术人员和操作工人的实践经验人工进行的, 整个路线规划过程智能化程度比较低, 且不是最优路线, 所以综合上述分析的不足, 以减少检测费用为目的。笔者在文献[11]的基础上, 研究实际情况下导管架外轮廓的单面检测路径规划, 并和整体检测时的路径规划做对比, 通过仿真分析寻找出导管架全遍历的最短路径。
1 导管架的分类与模型建立
1.1 导管架海洋平台
导管架式海洋平台由上部结构和下部结构组成, 如图1所示。导管架是其平台的重要组成部分, 不同的导管架结构形式用于不同的用途、工作海况, 最常见的有四腿式导管架和八腿式导管架两种形式[13-14], 而导管架主体结构斜撑的布置类型主要有5种形式:对角型、倒K型、K型、X型和宝石型, 如图2所示。其中极限承载力最大的是X型布置方案, 当导管架底层受外载作用导致其斜撑内力重新分布时, 平台的承载能力增加, 所以X型布置的导管架结构较为稳定, 失效最慢。
1.2 海洋导管架模型建立
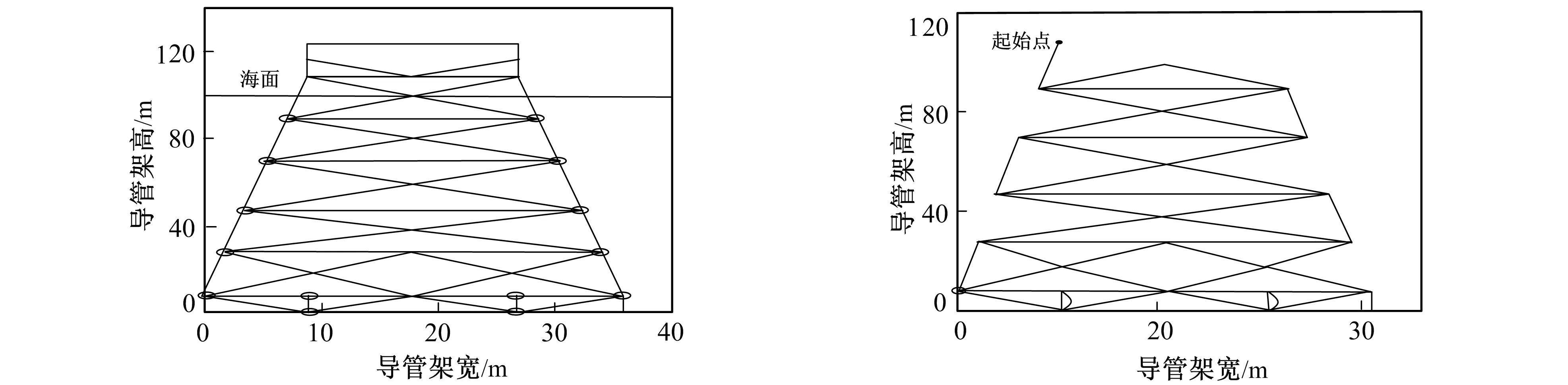
以惠州油田某导管架平台为例, 针对波浪、海流和海水腐蚀等时变因素引起的导管架腐蚀和疲劳破坏等现象, 应用ROV载体进行导管架状态监测。该导管架属四腿式导管架结构, 以X型布置为主, 共7层水平片层, 导管架垂直高度为123.3 m, 顶部尺寸为18.2 m×15.2 m, 底部尺寸为35.6 m×32.5 m, 层间高度从上往下分别为14.8 m、19.1 m、19.8 m、22.9 m、19.1 m、20 m和7.6 m, 处于水深为100 m左右的南海水域, 其展开图和侧视图如图3、图4所示。
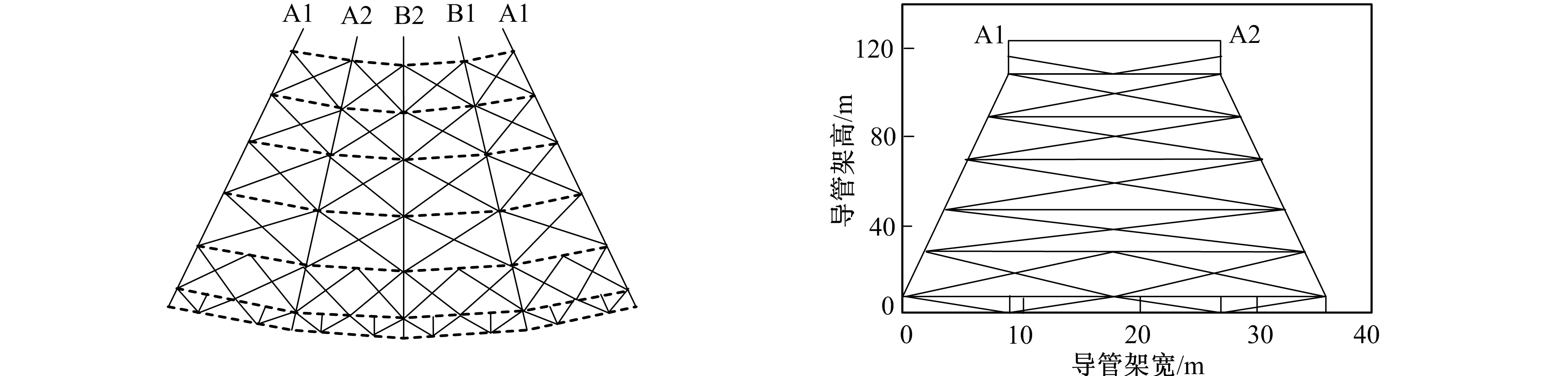
图3 导管架展开示意图 图4 导管架侧视图
2 ROV路径规划建模和方案分析
2.1 路径规划建模
为便于分析和讨论, 笔者采用图论及其算法中规定的概念和表示方法[11]。所谓图G(Graph)是一个三元组, 记作G={V(G),E(G),φ(G)}, 其中V(G)是个非空集合, 称为图G的结点集合(vertex set),E(G)是G的边集合(edge set),φ(G)是E到V×V的一个关联函数, 表示运动性能的评价函数。图论中无向图一般用G表示, 所以笔者研究的图形属于无向图范畴。
把ROV检测对象看作一个连通的带权无向图G, 将导管架的腿、横梁等杆件结构等效为图的弧, 各个杆件的连接点等效为图的结点, 结点间的杆件长度定义为权, 则整个导管架就可用一个无向图G={V(G),E(G),φ(G)}表示, 这里φ(G)=f(L), 其中L为路径长度函数。
在路径规划中, ROV等效为一个质点, 其位置用三元组(x,y,z)表示。定义ROV的检测对象所在空间为可达区域S, ROV的起点位置为A, 终点为B, 当前所处节点为C, 则有[12]
f(L)=a1LAC+a2LCB+a3L3+a4L4
(1)
其中LAC为起点A到当前节点C所经过的路径长度;LCB为当前节点C到终点B之间的直线距离;L3为ROV从起点A到当前节点C移动过程中的侧推距离;L4为ROV从起点A到当前节点C过程中的后退距离。当系数a1=a2=1,a3=a4=0时, 可得理想状态f(L)=a1LAC+a2LCB。
设dij为顶点i,j之间的距离,aij为系数, 并定义
(2)
(3)
L∑={Ls(x,y,z)|k=1,2,…,m}
(4)
所以ROV检测导管架的路径规划模型为
(5)
2.2 方案分析
从检测的目的来看, 用ROV对导管架进行目视检测在某种程度上属于Euler遍历问题[15], 同时还具备中国邮路问题的特征[16]。所以解决本文中的ROV检测路径规划问题就等同于解决一个中国邮路问题, 即在导管架的连通带权无向图G中, 寻找到经过每条边至少一次且权和最小的回路。
如果对应的图G是Euler图(欧拉图), 则从检测开始的结点出发的任何一条欧拉回路都是符合要求的ROV最优检测路线。

图5 Euler遍历规划流程图
如果对应的图G是半欧拉图, 即只存在两个奇点x和y, 则有一条以x和y为端点的欧拉通路。因此, 由这条欧拉通路加x到y最短路即是所求的最优检测路线。
如果连通图G不是欧拉图也不是半欧拉图, 则采用Edmonds-Johnson算法[15]将非Euler图构造成为Euler图。在Euler图中, Fleury算法是常用算法, 用于解决最优邮路问题, 该算法从图中一个顶点出发, 采用深度优先搜索法, 每次描画一条边构作Euler环游迹线, Euler遍历规划的流程图, 如图5所示。
判断一个连通图G是否是Euler图, 一般通过以下定理判定。
定理1 无向连通图G是欧拉图, 当且仅当图G中无奇度数结点。
定理2 连通图G具有一条vi到vj的欧拉路, 当且仅当vi和vj是G中仅有的两个奇度数结点。
3 ROV导管架检测的Euler遍历
以导管架的单侧为例(A1A2面), 导管架的奇点分布图如图6所示。
图6中序号为导管架结点编号, 圆圈表示奇点。从图6可见, 奇点个数为16, 所以很明显该图不属于Euler图, 在进行目视检测时必定会在奇点之间进行重复边的遍历, 因此需要在奇点间通过添加辅助边以消除奇点, 构造Euler图G*寻找Euler回路或通路。
采用Edmonds-Johnson算法对图6进行图形处理, 构造Euler图G*, 其步骤如下。
1)做图6的连通加权图G如图7所示。

图6 奇点分布图 图7 连通加权图
在图7中, 奇点集为
V0={1,2,4,5,7,8,10,11,13,15,18,19,21,22,24,25}
2)在V0中, 每对奇点最短距离如表1所示(Dijkstra算法求得)。
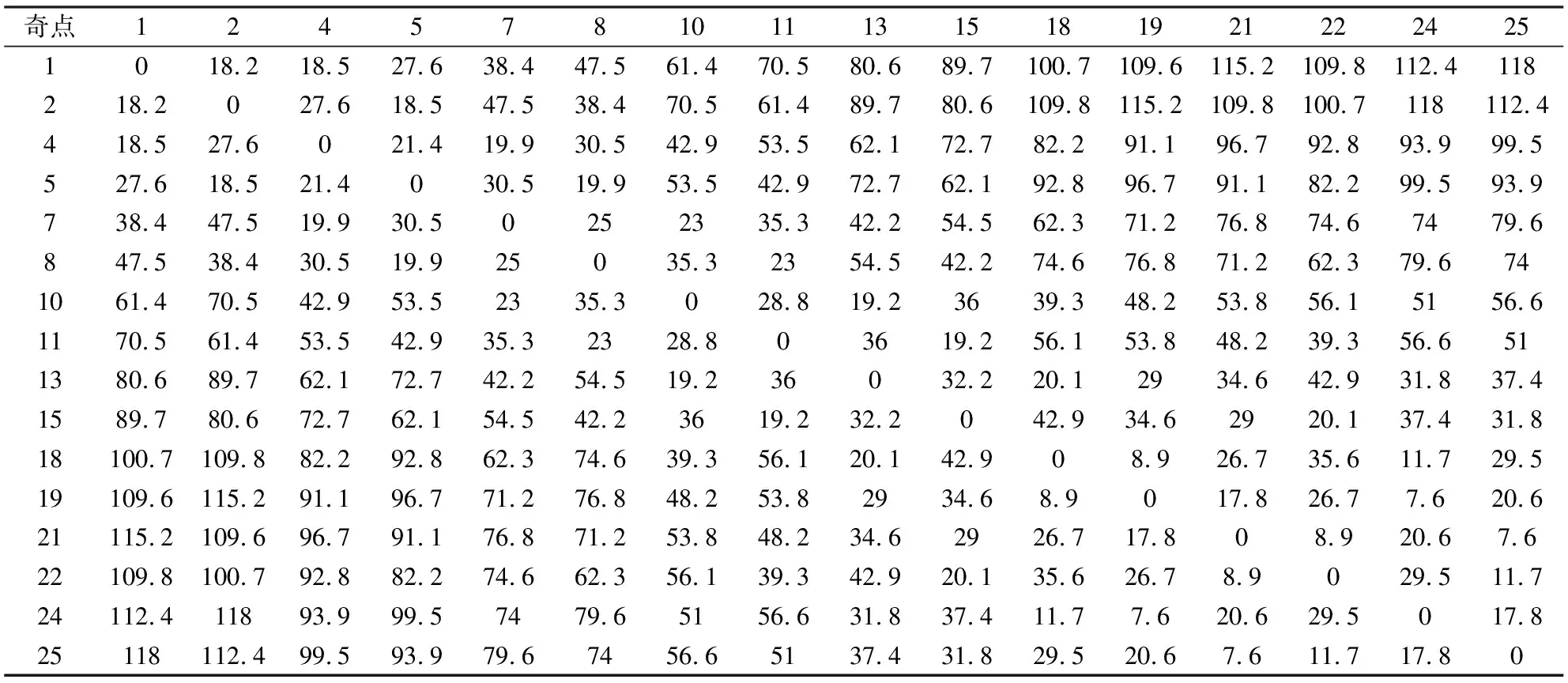
表1 奇点间最短距离数据表
3)构造完全加权图K16,V(K16)={1,2,4,5,7,8,10,11,13,15,18,19,21,22,24,25}, 边权W为对应奇点间最短距离, 如图8所示。
4)求3)中K16的最佳(总权最小)的理想匹配M[14],M={(1 2),(4 7),(5 8),(10 13),(11 15),(18 19),(21 22),(24 25)}, 如图9所示, 使匹配点间的距离之和l1 2+l4 7+l5 8+l10 13+l11 15+l18 19+l21 22+l24 25最小。
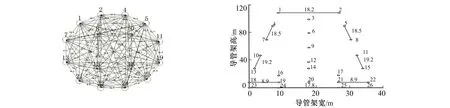
图8 完全加权图 图9 最小权理想匹配图
5)在G中求得点1和点2之间最短路径为P(1 2)=1,2;点4和点7之间最短路径为P(4 7)=4,7;点5和点8之间最短路径为P(5 8)=5,8;点10和点13之间最短路径为P(10 13)=10,13;点11和点15之间最短路径为P(11 15)=11,15;点18和点19之间最短路径为P(18 19)=18,19;点21和点22之间最短路径为P(21 22)=21,22;点24和点25之间最短路径为P(24 25)=24,25。
6)在点对(1 2),(4 7),(5 8),(10 13),(11 15),(18 19),(21 22),(24 25)间添加一条权值最小的辅助边, 该辅助边用弧表示, 与原有边平行且权值相等。得到导管架的构造G*(V,E), 如图10所示, 其中黑色编号为结点, 棕色连线代表新添弧线。
7)构造图G*中不存在奇点, 所以具有Euler图的属性, 在该图中通过Fleury算法便可求出一条Euler回路。调用Matlab图论工具箱中的grIsEulerian.m可以判断构造图G*为Euler图, 并可求出一条Euler回路W,W的遍历顺序编号如图11所示。

图10 导管架A1A2面构造图G* 图11 Euler回路遍历次序图(ROV轨迹图)
上述解法具有代表性, 一般具有中国邮路性质问题的解法步骤总结如下:
① 求加权连通图G中奇次顶点集合V0;
② 对V0中的每个顶点u,v, 用Dijkstra算法求距离d(u,v);
③ 构造加权完全图K,V(K)=V0,K中边uv的权为d(u,v);
④ 求加权图K的总权最小的理想匹配M;
⑤ 在图G中求出M中每组理想匹配间的最短轨迹;
⑥ 把在⑤求得的每条最短轨迹边添加辅助线变为同权倍边, 得到构造图G*;
⑦ 使用Fleury算法在构造图G*求得一条Euler回路, 该回路即为最佳轨迹。
通过上述步骤求出了ROV在单侧(A1A2面)检测导管架时的遍历检测路线W, 该路线总路程为971.2 m, 但当对整个导管架进行三维空间检测时, 即4个面都要检测时, 则总路程至少为单面路程的4倍, 即3 884.8 m, 为了缩短ROV的运行时间和距离从而减少ROV的运行费用, 就需要对导管架进行相应的简化处理。
4 导管架整体检测时的路径规划
为了便于分析, 仍然选取A1A2面进行检测分析, 检测时对导管架检测图G做如下的简化处理:
1)删除图G中的冗余结构, 如在海面上不需要ROV进行检测的边;
2)在两侧面相接处的重复边, 在一侧单面检测时已经被检测到, 另一面检测时就无需再重复检测该边, 将其删除简化, 其次要重点考虑连接两奇点的重复边, 删除这样的重复边可以减少奇度结点的个数, 这样可以大大简化后续图形处理的难度。
经过简化处理后得如图12b的简化检测图G′(V,E), 图12a为初始图形。
a A1A2面初始图形 b 简化图形G′
在图形12中可看出简化前奇点数为14个, 简化后奇点数为6个, 但奇点数任然超过了2个, 不是Euler图形, 所以仍需对G′进行图形处理, 在奇点间添加辅助边来消除奇点, 构造G′的Euler图G*, 在图G*中寻找最优检测路线。
采用前文提及的方法对简化图形G′进行图形处理后, 得到其连通加权图和构造图G*, 如图13、图14所示。
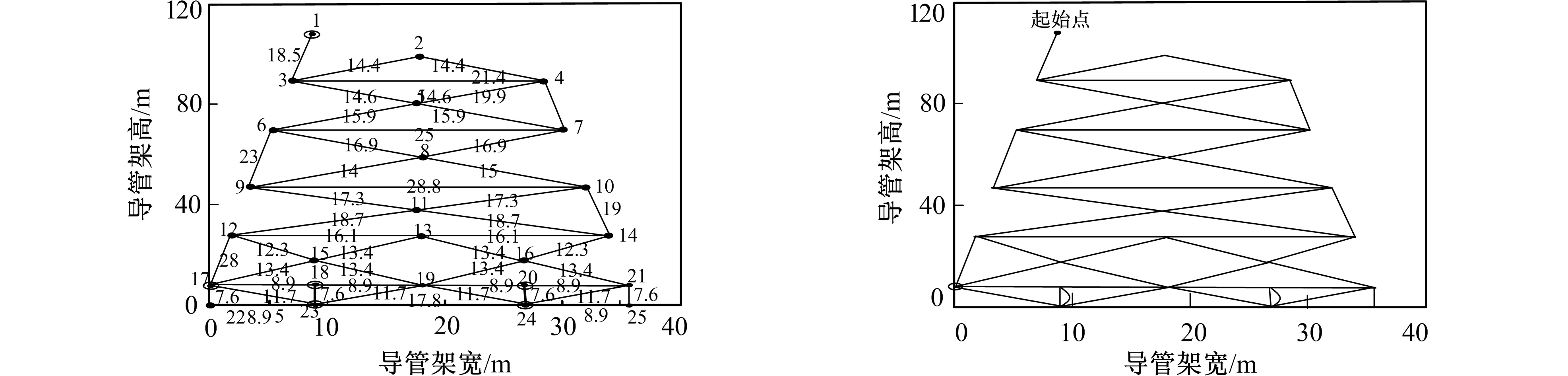
图13 简化图形G′加权图 图14 构造图G*
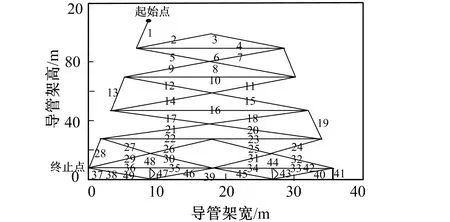
图15 半Euler通路遍历次序图
调用Matlab图论工具箱中的grIsEulerian.m可以判断构造图G*为半Euler图, 使用Fleury算法可求出一条Euler通路W′,W′的遍历顺序编号如图15所示。通过上述步骤求出了ROV对导管架进行三维空间即四面检测时的遍历检测路线W′, 该路线总路程为709.1 m, 四面检测时总路程为2 836.4 m, 相比于遍历检测路线W, 单面检测总路程减少了262.1 m, 四面检测时总路程减少了1 048.4 m, 少走了约27%的路程, 有效的缩短了ROV的运行时间和距离从而减少ROV的运行费用。
5 结 语
笔者主要以惠州油田某四腿X型布置结构的导管架平台为研究对象, 针对在实际工程中, 使用ROV对导管架进行目视检测时, 其检测路线规划过程智能化程度较低, 且不是最优路线这一问题, 以减少检测费用为目的, 结合图论和组合优化等理论知识, 以导管架单面检测和整体检测即四面检测两种检测情况进行了路径规划研究, 通过仿真分析后得出相应的遍历路线, 路径规划方法和仿真结果具有较大的理论价值和实际指导意义。
猜你喜欢
汽车观察(2022年12期)2023-01-17
车迷(2022年1期)2022-03-29
电子制作(2022年1期)2022-01-28
河北理科教学研究(2021年3期)2022-01-18
小学生学习指导(爆笑校园)(2021年10期)2021-11-01
小学生学习指导(爆笑校园)(2021年9期)2021-09-27
电子制作(2021年14期)2021-08-21
小学生学习指导(爆笑校园)(2021年4期)2021-04-29
军事文摘(2020年14期)2020-12-17
数学小灵通·3-4年级(2017年9期)2017-10-13