小型自走式割灌机的设计与研究
2019-12-22 02:31于会鑫刘九庆邓兆军
农机化研究 2019年6期
战 丽,于会鑫,刘九庆,马 岩,邓兆军,郭 璨
(东北林业大学,哈尔滨 150040)
0 引言
灌木林作为一种重要的森林资源,在防风固沙等生态环境保护方面有着难以替代的作用。我国现有灌木林约为5 365万km2,其中49.73%的灌木林被应用于荒漠化的治理。目前,我国农林类机械的发展还处于较为原始的阶段,灌木收割设备的种类较少,还没有形成具有一定标准的产业。国内外生产的小型割灌机械主要以背负式、侧挂式及便携式手动割灌机为主,具有适用范围广泛、灵活方便及成本较低等特点,受到了广大用户的青睐。但是,这类产品还具有自动化程度低、工人劳动强度大、生产效率较低、危险性较高等缺点;德国、法国、日本等发达国家生产的灌木收割联合设备,自动化程度高,在大幅度提高生产率的同时也大大降低了工人的劳动强度;但受制于其结构的影响,主要适用于地面较为平整的人工灌木林等工作环境,对于灌木林地及沙地等复杂环境的适应性较差,且外形尺寸较大,限制了其工作的灵活性[1-3]。笔者根据伐区间伐作业的情况,设计一台总质量400kg,具有良好的爬坡越障能力及较高灵活性的小型自走式割灌机,并对其通过性能、切削性能及转向性能等进行了设计与分析。
1 小型自走式割灌机的基本结构
小型自走式割灌机由行走机构、翻转机构、割灌动力总成、安装板、切削主轴系及拨料装置等组成,如图1所示。行走机构以汽油机为动力,割灌动力总成、切削主轴系、拨料装置等通过螺栓连接安装在安装板上,安装板通过翻转机构与行走机构连接;翻转机构可根据割灌作业的要求,调整小型自走式割灌机的切割高度,在遇到路面障碍以及割灌作业完成后,还可以通过调节翻转机构将工作头部分抬起,保护刀具和作业人员[4-6]。
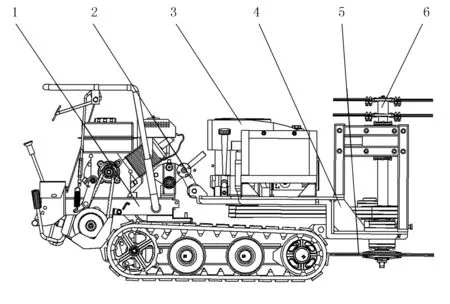
1.行走机构 2.翻转机构 3.割灌动力总成 4.安装板 5.切削主轴系 6.拨料装置
2 小型自走式割灌机行走机构分析
割灌作业需要在环境复杂的山地、沙地、丘陵进行,因此小型自走式割灌机需具备一定的爬坡能力。目前还没有关于自走式割灌机爬坡角度设计的相关计算方法,因此参考工程履带车辆的爬坡角度算法,取爬坡角α=30°。小型自走式割灌机在爬坡时的受力分析如图2所示。
小型自走式割灌机在爬坡作业时,主要受到重力G、牵引力Fq、地面作用于履带的摩擦力f及垂直于地面向上的支撑力N[7]。

图2 小型自走式割灌机上坡受力简图Fig.2 Small self-propelled brush cutter uphill stress diagram
根据前文可知:G=mg=4000N(取g=10N/kg),同时G可分解为垂直地面向下的分力G′、和沿坡面斜向下的分力G″。
垂直地面向下的分力为
G′=G·sinα
沿坡面斜向下的分力为
G″=G·cosα
小型自走式割灌机上坡时,地面作用于履带的摩擦力为
f=μG″=μG·cosα
其中,μ为地面与履带间的摩擦因数,根据工作环境取μ=0.12。
小型自走式割灌机上坡作业时所受的总行驶阻力Ff为
Ff=G′+f=G·sinα+μG·cosα
因此,根据牵引力的平衡关系可得
Fqmin=G·sinα+μG·cosα
通过计算可得,小型自走式割灌机的最小牵引力Fqmin=1936N。
小型自走式割灌机行走机构所需的额定功率P为
其中,P为小型自走式割灌机行走机构的额定功率(W);v为小型自走式割灌机的行驶速度,取v=5km/h;η为小型自走式割灌机的传动效率,η=0.65。
计算得P=4.14kW。考虑到空气阻力、地面障碍等影响因素,选用6.5HP(4.85kW)的汽油机作为小型自走式割灌机行走机构的动力源。
3 小型自走式割灌机切削系统的研究分析
根据以往的设计经验,当圆锯片的锯切线速度为25~35m/s时,在进行割灌作业时锯片具有较小的切削阻力,同时可保证不会对灌木茬造成太大的损坏[8],则对圆锯片的转速要求为
其中,n为圆锯片的转速(r/min);vc为圆锯片刃口的线速度(m/s);d为圆锯片的直径。
计算得锯片转速为1 179~1 651r/min,选用转速为2 600r/min的汽油机为小型自走式割灌机工作头部分的动力来源,汽油机的带轮基准直径d1=85mm,主轴总成的带轮基准直径d2=160mm,传动比为17:32,则圆锯片的转速n=1 380r/min,则圆锯片刃口的线速度为
计算得圆锯片的切割线速度为29.25m/s。
每个圆锯片进行割灌作业时所消耗的功率Pc为
其中,Fc为圆锯片的切削力(N)。
刀具在对木材进行切削时,需要受到诸多因素的影响,如切削宽度、切削速度、进给速度及切削角等。圆锯片的切削力与影响因素之间具有一定的函数关系[9],若要建立切削力与影响因素之间的完整函数关系是十分困难的,因此通常采用在实验数据基础上推导出的经验公式作为计算依据。圆锯片的切削力Fc的计算公式为

单位切削力Ft为
其中,Cp为圆锯片的变钝系数(N);a为切屑厚度,a=Uz·sinθa;δ为切削角,取δ=60°;ft、At、Bt、Ct为修正系数(N/mm2)。
取ft=(0.4+0.0036θav)×9.81,At=0.036×9.81,Bt=0.016×9.81,Ct=1.19×9.81。
变钝系数Cp为
其中,Δγz为刃口半径增量,Δγz=γΔ·L;γc为刃口初始半径,取γc=10μm;γΔ为进行1米切削加工后刃口半径的单位增量,取γΔ=0.001μm/m;L为切削长度。
根据不同的切削加工条件,L的计算方法不同。小型自走式割灌机在进行切削加工时L为
其中,T为单位工作日时间,设每个工作日的工作时间为2h,则T=2h=120min;C1为工作日利用系数,取C1=0.9;C2为时间利用系数,取C2=0.9。
运动遇角θa为

圆锯片切削时的每齿进给量Uz为
其中,U为进给速度,取U=5m/min。
整理公式得,圆锯片的切削力Fc=151.37N,计算得每个圆锯片进行割灌作业时所消耗的功率Pc=4.43kW。
计算得小型自走式割灌机工作头部分的额定功率为P=2×Pc=8.86kW。
根据以上计算可知:小型自走式割灌机在进行割灌作业时,每个圆锯片输出的切削力为151.37N,每个主轴传递的功率为为4.43kW。因此,小型自走式割灌机选用16HP(11.93kW)的汽油机作为工作头部分的动力来源。经计算,皮带传动传递的功率均符合设计要求。
4 小型自走式割灌机转向性能分析
由于小型自走式割灌机所处工作环境复杂,易于出现突发状况,行走机构除了需要具有充沛的牵引力、爬坡能力,还需要具有灵活的转向能力。履带式行走机构转向原理是调整两侧履带驱动力,使两侧履带具有行走速度差,进行转向。
4.1 小型自走式割灌机转弯能力分析
小型自走式割灌机行走机构在进行转向运动时可简化为其绕固定轴线O的转动,履带相对地面滚动,产生滚动阻力。行走机构在进行转向运动时,其内部阻力增大,履带与地面有相对摩擦,同时履带转向时剪切土壤,并推动履带两侧的土壤。履带支承部分受力分布情况如图4所示。

图3 履带支承部分受力分布Fig.3 Crawler support part of the force distribution
假设履带在支承部分的载荷分布均匀,可得履带支承部分单位长度的载荷q为为
其中,G为重力;L为履带接地长度,L=650mm。
履带回转时,支承部分单位长度所受的来自于土壤的横向反力Ff与该点所受的载荷q成正比,则
其中,u为履带与土壤间的阻力系数,取u=0.7。
履带支承部分单位长度所受的转向阻力矩为
dMu=Ff·xdx
其中,dMu为单位长度的履带所受转向阻力矩。
对dMu进行积分,得到履带支承部分的转向阻力矩Mu为
转向时,两侧履带有不同的切线牵引力Fk1、Fk2,克服履带的滚动阻力Ff1、Ff2;同时产生转向力矩Mz,克服地面对履带产生的转向阻力矩Mu。行走机构转向时的受力如图5所示。
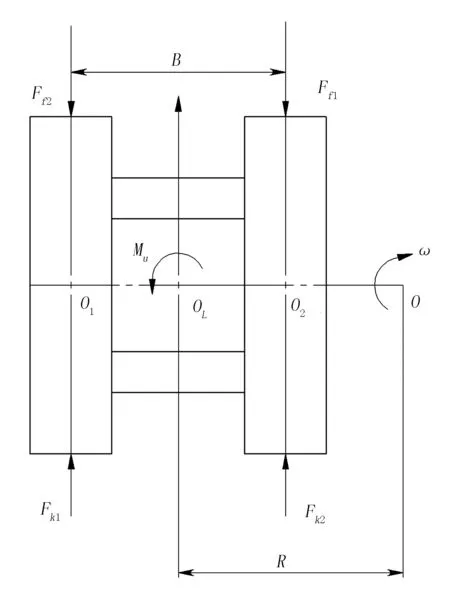
图4 转向受力模型Fig.4 Steering force model
假设行走机构转向时切线总牵引力与直线行驶时的切线总牵引力相同,等于两侧履带的切线牵引力Fk1、Fk2之和,即
Fk=Fk1+Fk2
行走机构直线行驶时的牵引力主要克服履带与地面之间的滚动摩擦以及进行割灌作业时所产生的切削力,则
Fk=μG+2Fc=782.74N
转向力矩Mz由转向时外侧履带的切线牵引力大与内侧履 带切线牵引力所产生,用于克服转向阻力矩Mu,可得
整理公式可得

Fk1=Fk(0.5+k)
Fk2=Fk(0.5-k)
由以上两式可得出如下结论:
1)当k=0时,Fk1=Fk2,此时履带沿直线行驶;
2)当0
3)当k=0.5时,Fk1=Fk,Fk2=0,慢侧履带的切线牵引力为0,快侧履带的切线牵引力为整机的切线牵引力;
4)当k>0.5时,Fk1>Fk,Fk2<0,慢侧履带的切线牵引力为0,Fk1、Fk2的方向相反,Fk2成为阻力;快侧履带的切线牵引力要大于整机切线牵引力,用于克服Fk2产生的阻力。
通过分析可得,履带行走机构的转向参数k=1,大于0.5,此时Fk1>Fk,Fk2<0,内侧履带的速度为0,即内侧履带进行制动,外侧履带进行转向[10-12]。
4.2 小型自走式割灌机转弯半径分析
由于小型自走式割灌机的工作环境复杂,转弯半径直接影响转弯的灵活性。行走机构在水平路面转向时,可以简化为其在水平面上绕轴线O的转动,其转向运动示意图如图6所示。

图5 小型自走式割灌机转向运动示意图Fig.5 Small self-propelled brush cutter steering motion diagram
行走机构转向时的角速度ω为
其中,ω为行走机构的转向角速度;R为行走机构转弯半径;V为行走机构转向的平均速度,V=(V1+V2)/2。
由图5可知:行走机构进行转向运动时,两侧履带具有相同的角速度,则
其中,V1为履带1的行驶速度;V2为履带2的行驶速度。
整理公式得
小型自走式割灌机进行转向时采用的是制动器对转弯内侧履带减速的方式进行转向[13]。由上文可知:转向时内侧履带的速度为0。根据上式,行走机构进行转向时,其转弯半径与外侧履带的速度无关,计算得其转弯半径R=290mm。
通过分析与计算,得出小型自走式割灌机的理论阻力矩为455N·m,理论转弯半径为290mm,转向参数k>0.5,与设计的要求基本吻合。因此,小型自走式割灌机具有较小的转弯半径及一定的灵活性,可以在环境复杂的林间更好地完成割灌作业。
5 样机试验
通过分析与计算,得出小型自走式割灌机的主要性能参数。为验证其设计的合理性,对方案进行三维建模、绘制图纸及委托工厂进行样机制造(见图6),并对样机进行试验验证。小型自走式割灌机的主要性能参数如表1所示。

图6 小型自走式割灌机样机Fig.6 Small self-propelled brush cutter prototype

表1 小型自走式割灌机主要性能参数Table 1 Small self-propelled brush cutter main performance parameters

续表1
小型自走式割灌机的试验在东北林业大学林区进行,收割对象为林区的矮树丛。在进行试验前,首先对小型自走式割灌机进行检查,加注燃油;再将设备启动预热后,对矮树丛进行收割试验。平茬对象及平茬效果如图7、图8所示。

图7 平茬对象Fig.7 Cutting objects

图8 平茬效果Fig.8 Cutting effect
样机的试验过程中,设备没有出现熄火、异响、震颤等异常情况,且操作简便、易用。通过对平茬后的矮树丛留茬进行观测,茬口的平均高度60mm,劈裂率低于5%。小型自走式割灌机收割后的矮树丛茬口平整,高度均匀,平茬效果良好,加工效率较高,少数的劈裂对次年的萌发并无明显影响,可为灌木的间伐抚育及灌木枝条的资源化利用提供基础数据。
6 结论
笔者所设计的小型自走式割灌机结构合理紧凑,具有较小的整体尺寸,可在工作环境恶劣的灌木林地工作,4.85kW的底盘可保证在工作过程中的动力充沛;11.93kW的汽油机满足割灌机的割灌作业要求,可以输出足够大的切削力;行走机构的转向性能良好,可保证在进行割灌作业时具有灵活的转向性能。相比于我国现有的便携式手动割灌机及国外的大型灌木收割联合设备,小型自走式割灌机综合了二者的优点,自动化程度较高,体型较小,使用方便灵活,同时具备一定的爬坡越障能力,可适应各种复杂的地形以及工作环境。该小型自走式割灌机的设计适应了我国林区不断发展的需求,可为推动我国割灌机械的发展做出一定的贡献。
猜你喜欢
农业装备与车辆工程(2021年8期)2021-08-28
当代陕西(2021年13期)2021-08-06
南方农机(2021年1期)2021-01-20
当代工人(2020年1期)2020-05-11
现代营销·理论(2019年10期)2019-09-10
科技创新与应用(2017年26期)2017-09-12
科技创新与应用(2017年1期)2017-05-11
中学生数理化·高一版(2016年4期)2016-11-19
科技与创新(2016年6期)2016-04-21
父母必读(1999年3期)1999-06-07