载人月球软着陆GNC技术研究
2020-02-01 01:38张洪华张晓文关轶峰
载人航天 2020年6期
李 骥,张洪华,张晓文,关轶峰
(1.北京控制工程研究所,北京 100094; 2. 空间智能控制技术重点实验室,北京 100094)
1 引言
进入二十一世纪,月球探测再次掀起热潮,美国、俄罗斯、欧空局、印度、日本、以色列都制定了相应的月球探测计划。与此同时,中国探月工程按照绕、落、回三步走的计划稳步推进,已于2013年、2019年和2020年成功将嫦娥三号、四号和五号着陆器送上月球表面。在无人月球探测项目完成后,载人登月将成为中国航天后续发展的重要方向之一。面对中国的有力竞争,美国提出了阿尔忒弥斯计划(Artemis Project),旨在实现人类重返月球并建立永久月球基地[1]。
中国实施载人月球登陆需要借鉴大量无人月球探测任务中积累的技术经验,考虑到载人任务的特殊性,必须采用一些新技术和新设计。载人登月任务的新特点包括:①飞行器的规模和质量更大,控制方式会发生变化;②从任务科学价值和着陆安全性的角度以及面对建设月球基地的终极目标考虑,着陆精度需要大幅提高,达到优于百米的定点着陆水平,需要制导和导航技术有跨越式进步;③从发挥人在着陆过程中的主观能动性角度出发,需要航天员作为驾驶员,而不仅仅是乘客参与着陆过程控制,这对着陆手动控制技术提出了新需求。其中,核心的关键技术包括:①为解决定点着陆高精度导航需求提出的陆标图像导航技术、信标导航技术;②为解决定点着陆高精度落点控制问题提出的变推力航程可控制导技术;③针对大型着陆器动力下降过程姿轨耦合控制提出的推力矢量控制技术、并联发动机协同控制技术;④针对着陆有人驾驶问题提出的手动着陆控制技术。这些技术中有些已经在阿波罗登月任务中得到解决,比如推力矢量控制技术;有些在阿波罗登月任务中进行了成功的应用,但在新一代载人登月项目中仍不断发展,例如手动着陆控制技术;还有一些技术对于国外载人登月项目也是新的需求和挑战,比如定点着陆导航、高精度定点着陆制导等。这些技术在中国现有的无人着陆器上均未曾使用,是载人月球着陆亟需解决的关键问题。
本文针对载人月球着陆任务的新需求,以中国无人月球探测器制导、导航与控制(Guidance Navigation and Control, GNC)技术为基础,从导航、制导、控制以及手动着陆控制4个方面展开论述,提出满足任务要求的GNC技术解决途径。
2 载人软着陆的导航技术
2.1 无人着陆导航技术
中国无人月球着陆器所使用的导航方案是惯性导航结合测距、测速修正[2]。惯性导航提供整个着陆动力下降过程动态环境下连续的位置、速度和姿态解算。但对于月球软着陆任务来说,惯性导航的初始位置、速度一般由地面测定轨提供,不可避免地存在误差,再加上惯性器件自身的测量误差,以上将导致着陆时刻着陆器惯性导航提供的绝对位置、速度存在较大的偏差,这必然影响着陆安全。另一方面,月球表面存在地形起伏,惯性导航是一种绝对导航方式,无法提供满足精度要求的相对月面的导航解算结果。
测距敏感器能够获取沿波束方向的相对月面的距离,经过姿态转换后,可以获得相对月面的高度信息;测速敏感器能够获得沿波束方向的对月速度分量,只要有3个不共面波束,就可以完整地提供对月速度矢量。因此,使用测距和测速修正能够大幅提高惯性导航系统在高程和速度上的精度,满足着陆安全需要。但是这种导航方式难以获得高精度的水平位置信息。一方面,惯性导航受到初始误差、惯性器件误差的影响,其误差本身就处在不断增大的状态;另一方面,测距修正虽然能够提供高程信息,但无法提供水平位置信息,而测速的引入也只能抑制水平位置误差的发散,不能消除已经积累的水平位置误差。
在现有技术条件下,中国无人月球探测器落月时的导航水平位置误差一般在1~2 km量级,如图1所示,这显然不能满足载人定点着陆百米着陆误差的要求。

图1 嫦娥着陆过程终端导航水平位置误差散布Fig.1 Terminal navigation error dispersion of Chang’e Lunar lander in horizontal plane
2.2 载人着陆导航技术选择
提高导航水平位置精度的关键就是引入新的能够提供高精度水平位置测量的敏感器。月球环境下可行的方式主要有2种:陆标图像导航和信标导航。
2.2.1 陆标图像导航
陆标图像导航又称为地形相对导航(Terrain Relative Navigation, TRN),其基本原理是利用预先拍摄的目标天体局部地形图像或建立的地形模型作为地图,下降过程实时拍摄星下点图像,通过在预制地图上寻找并匹配特征点(称为陆标),确定自身的位置,并修正导航系统的位置、速度估值[3]。它包括地形地图的制备、陆标图像定位和导航滤波修正3个步骤[4](图 2)。该技术在小天体探测项目上不断得到测试和完善,并曾计划用于NASA的Altair载人月球着陆器中[5]。

图2 地形相对导航实施步骤 Fig.2 Terrain relative navigation methodology
地图制备需要着陆器或其他探测器在先期绕月飞行时通过长期观测获取。地图有2种类型:一种是直接拍摄的正视投影二维图,即绕月飞行器拍摄的月图;另一种是三维地形数据库,在进行导航图像匹配前,根据着陆过程中的光照强度、入射角、着陆器飞行高度,从三维地形数据中渲染出二维的预测图。第一种类型地形数据库水平分辨率较高,但匹配时受光照条件影响很大,在月球极区地区(太阳高度角很低)精度较差;第二种类型地形数据库水平分辨率较低,渲染二维预测图时计算量较大,但在低太阳高度角条件下,精度较高。
图像导航的核心在目标识别和图像匹配。着陆月球时,月表图像中最具有代表性的特征就是陨石坑。陨石坑的特征是阳光照射一面,亮度较高;背光一面,亮度较低,因此存在较大的灰度差。根据这种特性,利用一定圆内的灰度对比,可以识别出陨石坑(图 3)。识别出陨石坑后,不同的陨石坑构成三角形,与模板里的陨石坑三角形进行匹配(图 4),得到每个陨石坑的具体编号值,完成粗匹配。为了提高匹配精度,还可以利用尺度不变特征变换算子(Scale-Invariant Feature Transform,SIFT)进行精匹配。

图3 陨石坑识别和提取 Fig.3 Crater detection on real surface image

图4 陨石坑三角形匹配 Fig.4 Crater matching with triangle algorithm
2.2.2 信标导航
信标导航是一种构建人造标识的导航手段,其基本原理与GPS卫星导航类似。该方式需要人为布置一个或多个信标机,信标机的位置已精确测定,在着陆过程通过雷达/接收机接收信标机发出的信号,解算自身的位置信息。
信标机的布置位置可以考虑预先发射或任务中运行在月球轨道上的飞行器,或者由之前的着陆器携带到月球表面。无论如何,信标导航都需要其他飞行器配合,因此不适合独立的探测任务,比较适合大规模、连续、系统性的任务。信标机布置在月球轨道飞行器上时,受到轨道运动周期的影响,需要数量众多的飞行器才能做到全时段覆盖。对基地类任务,最好的选择是将信标机提前由其他着陆器携带到目标着陆区域。信标机的种类会对信标在月面的布局方式产生影响。信标机能够提供距离、速度、角度等几种信息的全部或部分[6]。对于既能提供距离也能提供角度测量的信标,相当于直接给出了完整的相对位置信息,单一信标机就可以完成对着陆的引导,布局的选择只要保证可见性即可。而对于只能提供距离测量的信标,由于信息并不完备,需要多个信标协助。Stephan等[7]研究表明,信标不能布置在下降轨道平面内,而必须在垂直该平面一定距离的位置上,且最好能够沿下降运动平面间隔布置多个信标机,才能提供持续和高精度的信标导航。但这种布局方式在工程实施上代价巨大,所以具备完整相对方位测量的信标接收机或雷达是最为恰当的选择。
2.2.3 定点着陆导航方案
综合考虑载人登月任务各方面的可实现性,对于单次或多次任务中的首次着陆,可以采用的导航方法应是惯性+测距和测速修正+陆标图像导航。而对于多次着陆的建站任务,可以在前者的基础上增加信标导航,将信标安装在首个着陆器上,并为后续着陆器提供导航服务。需要注意的是,信标机安装在月面,由于着陆器飞行距离在400 km以上,受到月球曲率的影响,着陆器在动力下降前期位于信标机所处位置的地平线以下,需要等到着陆器从地平线升起后才可使用,因此信标导航只能用于着陆后期。整个着陆组合导航的系统框架如图5所示。

图5 月球着陆导航系统框架Fig.5 Navigation system architecture for iunar landing
对这种惯性+测距和测速修正+陆标图像导航+信标导航(着陆后期)的组合方案进行仿真验证,仿真从15 km×100 km环月轨道近月点开始,设定导航相机在2000 m高度以上每5 s获得一幅导航图像,并进行陆标导航;测距和测速敏感器从6000 m高度到20 m高度区间内提供高程和速度修正;信标导航从着陆器相对信标机的高度角大于10°后引入,仿真结果如图6所示。可以看到:陆标图像导航引入系统后,位置和速度误差迅速缩小;到信标引入时,由于误差特性的变化会引起导航误差出现一定程度的波动,但随高度的下降误差会逐渐减小;在着陆的最后阶段,受到月尘和敏感器视场的影响,只能使用惯性导航,因此导航误差会在最后20 s时间内略微增大,但到触月时着陆导航误差仍在10 m以内,满足定点着陆需求。

图6 着陆导航位置误差Fig.6 Position determination error of landing navigation system
3 载人软着陆的制导技术
3.1 无人着陆制导技术基础
中国无人月球软着陆采用的制导技术与飞行阶段密切相关,不同的阶段采用不同的制导律,这是由不同阶段各自的任务目标决定的。以嫦娥三号为例,着陆过程分为主减速、快速调整、接近、悬停、避障和缓速下降[8],每个阶段的任务目标和采用的制导律如图7所示[9]。

图7 嫦娥三号探测器软着陆动力下降飞行阶段[9]Fig.7 Powered descent trajectory design of Chang’E-3[9]
主减速段的主要任务是降低减速开始时刻的轨道速度,推进剂消耗优化是该段制导律的主要设计目标。采用自适应动力显式制导方法,发动机处于最大推力状态,标称航程达到了430 km,占整个下降过程的绝大部分。
快速调整段是一个衔接过程,用于衔接前后两段在推力大小和推力方向上的不同。制导参数利用主减速制导律的预报过程计算完成,快速调整段飞行距离约为1 km。
接近段的主要任务是对着陆区成像并进行粗避障。接近段制导必须能够满足制导目标的位置、速度、姿态以及初始高度和速度等多项约束,采用的是改进的多项式制导算法。接近段飞行距离约为3 km,并有百米量级的落点位置调整能力。
悬停段、避障段和缓速下降段主要完成精避障和最终关机软着陆,采用的是高度、速度六自由度控制算法。这个阶段着陆器水平移动范围比较小,只有±20 m左右。
这种飞行轨迹和制导方案设计与美国阿波罗Eagle登月舱和Altair载人月球着陆器思路基本相似,但增加了接力避障能力。
从整个飞行过程看,对航程贡献最大的是主减速段,由于该阶段制导律使用发动机最大推力进行减速,所以发动机最大推力的偏差会影响减速的效率,使得下降航程出现散布。以嫦娥三号着陆器动力下降过程为例,动力下降初始点为15 km×100 km近月点,主发动机点火时的标称初始推重比为0.27(推力/(初始质量×地球G))。假定在动力下降初始轨道和着陆器初始质量不变的条件下,当主发动机推力出现偏差,偏差范围为±3%时(意味着初始推重比变化±3%),主减速航程会有±15 km的偏差(图8)。而接近段由于飞行高度比较低、速度比较小,大范围的位置调整需要付出巨大的推进剂代价,设计上只有百米量级的水平位置调整能力,所以不可能通过接近段来消除主减速段由主发动机最大推力偏差引起的航程偏差。因此,为了实现定点着陆,必须在主减速段实现终端位置的控制。

图8 发动机最大推力的偏差造成主减速航程的偏差Fig.8 Downrange dispersion by engine thrust bias in braking phase
最优控制理论研究表明,当发动机推力固定时,只能实现终端位置、速度共6个分量中的5个分量可控[10]。现有无人着陆器均放弃了制导律对航程的约束,因此对于未来定点着陆任务来说,最关键的就是增加主减速过程对航程的控制,这必须在制导和推进技术上做出2个重要改变:
1)制导律必须能够根据航程偏差,调整制导参数及制动推力,实现对终端位置、速度6个分量的闭环控制。
2)从推进系统角度出发,必须具备主减速过程改变制动发动机推力大小的能力。其手段可以是在主发动机最大推力附近增加变推力调整区间或者在主发动机之外增加辅助发动机,来提供额外的变推力能力。
3.2 载人软着陆制导技术选择
定点着陆制导的关键是如何调整制动发动机推力。对于该问题的研究可以分为2种不同的思路:
1)从最优控制理论的角度出发,直接研究制导律。根据理论研究结果,对于终端位置、速度全约束的任务目标来说,发动机推力一定是最小-最大或者最大-最小-最大这种Bang-Bang控制模式[11],直接求出最优控制问题的解析解非常困难。目前理论界的常用方法是将最优控制问题转化为优化问题,然后用非线性规划、凸优化等方法予以解决[12]。但是,数值优化计算量较大,使得在计算能力有限的器载计算机上在线求解比较困难,所以影响这种方法实用性的关键是高效且经专门编写优化的求解器[13-14]。
2)在现有的常推力显式制导的技术上升级,增加航程控制能力。显式制导由于不需要参考轨迹,能够根据下降过程中实时获取的状态信息,自主调整制导参数,因此鲁棒性很好。现有无人着陆器在主减速段制导的主要问题是不具备航程调节能力,这成为制导律改进的主要方向。
工程上可行的方案是基于预测-校正思想的计算方法,借助现有制导算法已具备的终端位置预报能力,通过比较预测终端与目标终端位置的偏差,迭代调整发动机推力,找到某个推力数值,使得制导预测终端与目标终端位置匹配[15]。对于3.1节的实例,假设发动机的最大推力有±3%的偏差,但发动机最大推力的90%~100%区间推力可调,将目标航程设为460 km(比发动机偏差下的最大航程稍大,以留出控制裕度),使用航程可控显式制导律进行落点控制,仿真结果如图 9所示,结果表明该制导律能够通过变推力调节克服发动机最大推力偏差的影响,在不同最大推力偏差下获得近乎一致的下降轨迹控制结果。
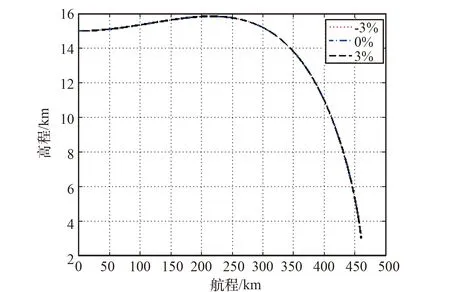
图9 主发动机推力偏差条件下主减速航程控制结果Fig.9 Downrange control in braking phase with thrust bias
4 载人软着陆的控制技术
4.1 无人着陆控制技术基础
中国无人月球着陆器月球软着陆前质量约为2 t,安装的是固定推力方向的7500 N发动机,着陆过程的姿态控制采用姿控推力器完成。
如果要实现载人登月,着陆器的质量要增加数倍至数十倍,例如美国的阿波罗Eagle登月舱质量为15 t,星座计划Altair登月舱质量为45 t。由于着陆器规模的增加,下降减速发动机的推力也必须成比例增加。由质心偏移、发动机推力偏斜等造成的干扰力矩也会出现量级上的增长。如果仍然用推力器实施姿态控制,则必须研制输出推力达到几百牛的姿控推力器,这种大推力的姿控推力器很难实现几十毫秒的脉冲工作方式。因此,从降低系统复杂度的角度出发,国外目前已有的载人着陆器设计都采用了摇摆发动机。摇摆发动机具有两轴调整机构,能够改变推力的方向,其作用包括:通过调整推力方向过着陆器的质心,大幅降低由于推力偏斜造成的干扰力矩;有目的地调整推力方向,主动产生控制力矩,可以提高快速姿态机动时的响应速度。
4.2 载人软着陆控制技术选择
载人软着陆控制技术与推进系统的设计联系非常紧密,主要有2种选择:①新研大型摇摆发动机,在此基础上实施推力矢量控制(Thrust Vector Control, TVC);②采用多台成熟的变推力发动机并联,在此基础上实施并联发动机异步姿轨耦合控制。
4.2.1 摇摆发动机推力矢量控制
摇摆发动机沿着陆器的纵轴安装,其推力方向的偏转可以产生着陆器2个横轴(俯仰和偏航)方向的控制力矩;而绕纵轴(滚动)的姿态控制,单台摇摆发动机是不能实现的,需要使用姿控推力器完成。由于着陆过程绕滚动轴一般无需姿态机动,所以虽然推力器形成的控制力矩较小,但足够胜任完成姿态保持类控制任务。
TVC控制策略分为滚动通道、俯仰/偏航通道2类。滚动通道仍采用控制器+脉宽调制方式实现,控制器可以使用相平面控制、PID控制或者其他抗干扰控制方法。控制器计算的指令力矩需要使用调制技术转换为推力器的指令脉宽,形成等效姿控力矩冲量。俯仰/偏航通道采用控制器+推力摇摆方式实现,控制器使用PID控制或者其他抗干扰控制方法,计算出指令力矩后,通过已知发动机的安装位置参数,计算出相应的指令偏角,然后由推力矢量控制机构实施,改变推力方向,形成控制力矩[16]。推力矢量控制框图如图 10所示。其中,q表示姿态四元数,ω表示角速度,θ表示角度,a表示加速度;上标b表示本体;下标SENS表示敏感器,CMD表示指令,ERR表示误差,x、y、z表示本体的3个坐标轴;fT是指令推力相比满推力的百分比;mp是预计的着陆器质量;Kp、Ki、Kd是PID(Proportional Integral Derivative)控制器的3个系数;δy和δz是摇摆发动机在y、z轴方向的摆角;PWM是指脉宽调制(Pulse Width Modulation)。

图10 推力矢量控制系统框图Fig.10 Block diagram of TVC control system
4.2.2 并联发动机异步姿轨耦合控制
立足工程实现,多台发动机并联安装也能提供着陆器制导系统需要的制动推力,而且并联发动机在火箭、飞船等航天器上也是常用的安装方式。
但是通常并联发动机的姿态控制仍是由其他装置实现的,例如火箭上使用的空气舵、燃气舵等,飞船上的姿控推力器等。理论上说,由于着陆任务需要变推力发动机,而并联的变推力发动机可以主动调整各台发动机工作在不同的推力下,使得总推力满足制导需要,而各台发动机不同推力形成的力矩又恰好等于姿控力矩。这种控制方式在原理上是可行的,但工程使用还有相当多的问题需要解决。主要包括:①执行机构的性能问题,包含各台变推力发动机推力调节的速率、同步性、精度以及发动机本身的可靠性;②控制器对各发动机指令力矩的动态分配,包含快速优化算法、控制力/控制力矩的包络约束等。
5 手动着陆控制技术
手动着陆控制是载人月球软着陆与无人月球着陆最显而易见的区别。事实上手动着陆成为阿波罗登月任务中唯一使用的控制方式。
阿波罗Eagle登月舱的手动控制只在进入接近段后开始,制动(主减速)段并没有设计。Eagle登月舱接近段以后的GNC系统软件设计有4种程序,分别是P64、P65、P66和P67[17]。P64用于接近段,航天员可以通过手柄设定目标着陆点,飞行过程自动控制;P65用于最终下降段,自动消除水平速度,维持姿态竖直,并保持匀速下降;P66是手控的半自动控制模式,其姿态控制通过姿控手柄以RCAH(Rate-Control Attitude Hold)方式完成。它的工作方式为:姿控手柄在俯仰和偏航方向的偏转等比例生成目标角速度指令,自动控制系统跟踪该角速度指令,当手柄回零后,以当前姿态为基准进行姿态保持。当航天员通过手柄使得飞行姿态倾斜后,就会由主发动机在对应方向上产生水平加速度分量,从而实现水平方向的平动运动控制。垂直方向采用步进下降速度控制模式(Incremental Rate-of-Descent, ROD)控制。由航天员通过拨动开关调整目标下降速度(步长为0.3 m/s),并由控制系统自动跟踪下降速率;P67是全手动控制模式,它的姿态控制方式与P66相同,也是通过姿控手柄以RCAH方式完成,但是它的垂向运动控制则是由航天驾驶员直接控制发动机推力大小来实现。
在阿波罗Eagle登月舱的实际飞行中,P65全自动着陆与P67全手动着陆均没有使用。阿波罗Eagle登月舱的着陆手动控制方案如图11所示。

图11 阿波罗登月舱的着陆手动控制方案Fig.11 Manual control mode of Apollo Lunar lander
美国重启重返月球计划后,新登月飞行器的手动控制方案也在持续研究之中。除RCAH控制策略以外,还有其他选择:①以阿波罗飞船研制阶段提出的备选手动控制策略为基础发展出的一种手动速度控制策略。其基本特点是由自控系统保持飞行姿态垂直,侧向速度指令通过手柄倾斜发出,然后由平移推力器执行[17]。②以直升机悬停控制为参考的ACVH/HH+IPC的控制方式[18]。ACVH(Attitude Command Velocity Hold)表示姿态控制手柄偏转产生的是目标姿态,手柄回零后飞行姿态不再倾斜,水平速度得以保持,HH(Hover Hold)表示悬停保持,IPC(Incremental Position Command)表示位置增量控制。当姿态手柄倾斜超过一定阈值后,产生倾斜角度指令,着陆器根据该指令倾斜飞行姿态,造成主发动机推力偏离重力方向,产生横向加速度,推动着陆器平飞;当姿态手柄回零后,飞行姿态恢复垂直,着陆器横向飞行速度保持不变;如果姿态回零时,着陆器的横向速度小于某阈值,那么就可以使用平动手柄进行水平位置的步进控制,即水平手柄朝某个方向推动一次,产生一个平移位置的步进增量,然后由着陆器自动控制系统按照该目标,通过平动发动机产生水平推力来实现位置控制。
中国在载人航天交会对接过程中已掌握了手动对接的控制技术,中国手动对接控制也包括姿态控制手柄和平移控制手柄2个部分。手动姿态控制采取的也是RCAH控制方式,即倾斜手柄产生等比例角速度指令信号,手柄回零后保持当前角度偏转。平动控制则是通过平动手柄倾斜产生对应方向的平动喷气指令。
由于载人月球着陆器也需要进行交会对接,因此着陆手动控制技术应与对接手动控制技术一起来进行考虑。基本方案包括:
1)手动姿控采用RCHA控制策略。通过控制姿态倾斜产生平移推力,可以用于大范围的平移机动。
2)手动平动控制采用半自动和纯手动控制方式。半自动控制时,平动手柄的倾斜用于产生目标水平速度或目标水平位置的步进;纯手动控制时,直接控制平动推力器的开关机。
3)垂直控制分为自动控制、半自动控制和手动控制3种。自动控制按照制导律自动进行垂直通道位置、速度控制;半自动控制通过操纵杆或拨动开关设定目标下降速度,由自控系统进行跟踪;全手动控制通过操纵杆或拨动开关直接操作发动机推力大小。
从国外飞行实践看,着陆过程全手动控制是非常困难的,应以半自动控制为主,人工操作用于设定目标指令,然后由自控系统去跟踪该指令。人直接控制执行机构模式仅在设计上予以保留,用于紧急情况下的故障应对。
6 结论
本文以现有无人月球着陆GNC设计为基础,详细分析了现有技术对于完成载人月球软着陆的不足,并提出了以下主要技术解决途径:
1)利用陆标图像导航、信标导航技术提高导航位置精度;
2)采用航程可控显式制导技术实现落点位置、速度六分量的全部约束;
3)采用推力矢量控制技术、并联发动机异步控制技术解决大质量载人着陆器的姿轨耦合控制;
4)设计半自动/手动控制策略实现有人参与的着陆控制。
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
北京航空航天大学学报(2021年4期)2021-11-24
国际太空(2021年8期)2021-11-05
舰船科学技术(2021年7期)2021-08-11
北京航空航天大学学报(2021年6期)2021-07-20
伙伴(2019年12期)2019-01-17
环球时报(2019-01-12)2019-01-12
兵器知识(2018年2期)2018-02-08
现代电子技术(2017年11期)2017-06-12
发明与创新·大科技(2016年5期)2016-05-17