液罐车精确动力学建模及其侧倾稳定性
2020-04-08 13:28任园园李显生郑雪莲
上海交通大学学报 2020年3期
任园园, 李显生, 郑雪莲, 王 杰
(吉林大学 交通学院, 长春 130022)
液罐车流固耦合系统具有无限多自由度的特点.在液体晃动流体动力学模型基础上构建的整车动力学模型虽能准确描述罐车动力学特性,但模型求解困难,且难以应用到车辆主动安全控制领域[1-2].因此,构建结构简单、准确性高的液罐汽车动力学模型十分重要.
对液体晃动动力学特性的处理直接关系到罐车动力学模型的准确性和应用难易程度.将液体晃动进行一定简化,并在简化模型的基础上构建罐车动力学模型是常用方法,其中液体晃动准静态模型和等效刚体模型最为常见.准静态模型利用液体静力平衡微分方程估计每一时刻的自由液面倾斜度,并据此计算瞬时液体质心位置,将液体团看作固体,并按固体方式计算冲击力和力矩.文献[3-7]利用准静态模型与车辆侧翻静平衡方程结合,考察罐车侧翻阈值.文献[8]将车辆动力学模型分别与准静态模型和等效刚体模型相结合,考察了液体晃动的响应成分对车辆操纵响应的影响.文献[9-10]基于准静态模型分析了罐体形状对车辆侧倾稳定性的影响,获得了最佳罐体形状及其尺寸.准静态方法只考虑了液体流动所导致的质心移动,其结果并未体现冲击力和力矩的动态特性,因此,在此基础上获得的罐车行驶稳定性分析结果过于保守,与实际偏差较大.
等效刚体模型利用刚体运动描述液体晃动,其与液体晃动具有动力相似、运动相似和几何相似的特征,能够产生与液体晃动相同的冲击力、冲击力矩和质心位移.文献[11]利用弹簧模型估计了液罐车上/下坡、颠簸道路上行驶时的纵向动力学特性.文献[8,11-12]利用单摆模型求解液体冲击力/力矩,并将其添加到车辆本体的动力学模型中,以此探究罐车侧倾稳定性.文献[13-15]利用椭圆规钟摆模型描述圆柱/椭圆柱罐体内的侧向液体晃动,并利用Working Model建立罐车平面运动的动力学方程研究罐车操纵响应.文献[16-20]完善了椭圆规钟摆模型的参数,扩大了模型在罐体充液比和侧向激励强度上的适用范围.文献[21-22]在单质量椭圆规摆模型的基础上,推导了多质量椭圆规钟摆模型,提高了液体侧向晃动的表达精度.基于等效刚体模型的罐车动力学模型能准确反映罐车动力学特性,且与普通载荷汽车的动力学模型类似,受到了业界的广泛认可.
然而,现有的基于液体晃动等效刚体模型的罐车动力学模型仍存在如下不足:① 多使用单摆描述圆柱罐体内的液体晃动,研究对象仅限于装载圆柱罐体的罐车,无法扩展至装配椭圆柱罐体的车辆[10-12].② 建模时未考虑液体晃动与车辆运动的耦合关系,所建罐车模型与实际情况有较大出入[10, 12, 16-21].在计算冲击力/力矩时,将液体晃动的罐体参照系按惯性参照系处理,利用惯性参照系下等效刚体模型的动力学方程计算冲击力/力矩,并将其添加到车辆本体的动力学模型中.实际上,罐体作为罐车的一部分,是一个既有沿车辆侧向的加速平动,又有绕车辆侧倾轴的加速转动的非惯性坐标系.液体晃动所产生的冲击力/力矩应利用非惯性坐标系中等效刚体模型的动力学方程推导而来.③ 液体晃动的等效刚体模型未考虑液体晃动的衰减特性.
为此,本文利用椭圆规钟摆模型描述常见的圆柱/椭圆柱罐体内的侧向液体晃动,推导罐体非惯性坐标系下,考虑液体晃动阻尼特性的椭圆规钟摆的动力学方程;在此基础上,将车辆本体和液体货物看作一个整体,以罐体作为两者联系的纽带,通过整车受力分析,建立液罐汽车整车动力学模型.最后,利用所建模型研究罐车动力学响应.
1 液体侧向晃动动力学方程
1.1 液体侧向晃动等效椭圆规钟摆模型
研究对象为装载圆柱/椭圆柱罐体的液罐汽车.利用Fluent数值求解圆柱/椭圆柱罐体内的液体侧向晃动,记录液体晃动中的质心位置及侧向冲击力,据此进行液体晃动的动力学特性研究.
根据液体侧向晃动的动力学特性,使用椭圆规钟摆模型描述圆柱/椭圆柱罐体内的液体晃动,如图1所示[15-17].图中:Otytzt为罐体坐标系;a,b分别为罐体横截面的长轴和短轴半径;acg,bcg分别为液体质心运动轨迹的长轴和短轴半径;ap,bp分别为钟摆小球C运动轨迹的长轴和短轴半径;bf为静止液体质心到罐体最低点的垂向距离;θ为钟摆小球的摆动角度.椭圆规钟摆的一端(A)只能沿罐体垂直轴运动,中部一点(B)只能沿罐体水平轴运动,由此自由端(钟摆小球C)的运动轨迹为椭圆弧.当B与A重合时,椭圆规钟摆退化为单摆,自由端的运动轨迹为圆弧.

图1 侧向液体晃动的等效椭圆规钟摆模型
在罐体形状、充液比和外界激励强度相同的条件下,钟摆应与液体晃动具有相同的动力学特性(振荡频率相同,冲击力和绕同一点的力矩相等).借助动力学等价原则,推导椭圆规钟摆的摆线长度,钟摆小球的质量等与液体晃动特性之间的关系为[15]
(1)
式中:g为重力加速度;ω为液体侧向冲击的角频率;ζ为罐体横截面的长短轴之比;mp为钟摆小球的质量;Fs为一个周期内液体冲击力的峰值;as为液罐车簧上质量的侧向加速度;max(mas)为假设全部液体均参与冲击时,其在一个周期内所产生的最大侧向冲击力;mf为不参与冲击的静止液体质量;m为罐内全部液体质量.
借助Fluent仿真所获得的液体冲击频率和冲击力,获得钟摆的摆线长度和钟摆小球的质量关于罐体形状和充液比的多项式函数为
bp/b=1.087+0.699 9Δ-0.140 7ζ-0.929 1Δ2-
1.178ζΔ+0.054 95ζ2-0.033 53Δ3+
0.540 4ζΔ2+0.151 8ζ2Δ
(2)
mp/m=0.784 4-1.729Δ+0.335 1ζ+1.156Δ2+
0.725 6ζΔ-0.125 4ζ2-0.321 9Δ3-
0.915 2ζΔ2+0.080 43ζ2Δ
(3)
式中:Δ为罐内货物的充液比(液面高度与罐体高度的比值,无量纲).
在罐体形状和充液比已知的条件下,利用式(1)~(3)即能获得钟摆模型相关参数.
1.2 惯性坐标系下椭圆规钟摆的动力学方程
自由振荡条件下,作用在钟摆小球上的力只有重力和摆线拉力.当钟摆摆线与罐体纵轴的夹角为θ时,钟摆小球沿侧向和垂向的受力平衡可表示为
(4)

(5)
式中:Hf为车辆静止时罐体中心到侧倾轴的高度.
对式(5)进行二次求导,可获得钟摆小球沿侧向和垂向的加速度.将其带入式(4)并消除变量FL,即可获得钟摆在惯性坐标系下的动力学方程:
(6)
利用线性阻尼模型描述侧向液体晃动的阻尼特性,并利用拉格朗日方程将线性耗散元件添加到式(6)中,得到有阻尼耗散特性的椭圆规钟摆在惯性坐标下的动力学方程为
(7)
式中:η为液体侧向晃动的无量纲阻尼系数.
1.3 非惯性坐标系下椭圆规钟摆的动力学方程
在惯性坐标系下,钟摆运动仅受初始摆角的影响.实际上,液体晃动发生在运动的罐体内.作为车辆的一部分,罐体既有沿车辆侧向的加速平动,也有绕车辆侧倾轴的加速转动.液体晃动的参照系是既有平动又有转动的非惯性坐标系,除初始摆角外,液体晃动还受到车辆运动的影响.
非惯性坐标系下,自由振荡钟摆小球的绝对加速度由相对加速度、牵连加速度和科氏加速度3部分组成:
aa=ar+ae+ac
(8)
式中:ar为钟摆小球在非惯性坐标系中的相对加速度;ae为动系相对于静系的牵连加速度;ac为动系相对于静系的科氏加速度.
动系既有平动又有转动时,其与惯性参照系的牵连加速度可表示为
ae=ay+[α×R+ω×(ω×R)]
(9)
式中:ay为动系相对于静系的侧向平动加速度;α为动系的转动角加速度;R为钟摆小球的位置矢量;ω为动系的转动角速度.
动系转动所引起的科氏加速度可表示为
ac=2ω×vr
(10)
式中:vr是椭圆规钟摆小球在动系中的运动速度.
利用式(9)和(10),可获得钟摆小球在非惯性坐标系中的绝对加速度为
(11)
式中:v为罐车前进速度;β为罐车质心侧偏角;r为罐车横摆角速度;φ为罐车车身侧倾角;e2为液体质心沿整车坐标系x轴的坐标.
将式(11)代入式(4)并消除FL,结合式(7),获得椭圆规钟摆在非惯性坐标系下的动力学方程:
(12)
2 液罐汽车动力学模型构建
2.1 前提与假设
为方便建立罐车动力学建模,作出如下规定和假设:
(1)罐车簧上质量为车辆整备状态下的簧上质量,不包含货物质量;
(2)罐车簧上和簧下质量关于车辆纵轴左右对称,其质心在车辆坐标系的y轴上;
(3)仅考虑车辆的侧向运动,不考虑液体沿车辆纵向的冲击以及由于横摆而产生的扭转运动.
以r、β、φ及θ为自由度,构建罐车4自由度动力学模型.

图2 液罐汽车侧向受力分析
2.2 液罐汽车侧向力平衡方程
车辆左转时,作用在液罐汽车上的侧向惯性力和外力如图2所示.图中:mt为液罐车簧上质量;mu为液罐车簧下质量;au为液罐车簧下质量的侧向加速度;af为罐体内静止液体质量的侧向加速度;apend为钟摆小球的侧向加速度;Ff为前轴轮胎侧偏力;Fr为后轴轮胎侧偏力.
车辆稳态转向时,侧向惯性力和外力保持平衡:
mtas+muau+mfaf+mpapend=2(Ff+Fr)
(13)
式(13)中,各部分的侧向加速度为
(14)
式中:H为钟摆小球到侧倾轴的高度,H=Hf-bpsinθ;hs为液罐车簧上质心到侧倾轴的高度;c,e分别为液罐车簧上和簧下质心沿整车坐标系x轴的坐标;H1为静止液体质心到侧倾轴的高度.
由此,液罐车侧向力平衡方程可表示为
2(Ff+Fr)-vr(mt+mu+mf+mp)+
(15)
2.3 液罐汽车横摆力矩和侧倾力矩平衡方程
2.3.1簧上质量惯性力矩 在簧上质量质心处建立与车辆坐标系平行的坐标系xsyszs.簧上质量关于xs轴左右对称,因而有Ixys=Iyzs=0.求解簧上质量关于其质心坐标系的角动量,并对角动量求导,得到簧上质量关于其质心坐标系的惯性力矩为
(16)
式中:Izs,Ixzs,Ixs分别为簧上质量绕其质心坐标系的转动惯量;is,js,ks分别为沿xs,ys,zs正方向的单位向量.
2.3.2簧下质量惯性力矩 在簧下质量质心处建立与车辆坐标系平行的坐标系xuyuzu.簧下质量关于xu轴对称并且不计及簧下质量的高度,因而有Ixyu=Iyzu=Ixzu=0.求解簧下质量关于其质心坐标系的角动量,并对其求导,获得簧下质量关于其质心坐标系的惯性力矩为
(17)
式中:Izu为簧下质量绕其质心坐标系的转动惯量;ju,ku分别为沿yu,zu正方向的单位向量.
2.3.3液体货物惯性力矩 在液体质心处构建与车辆坐标系平行的货物坐标系xcyczc.假设钟摆小球的转动惯量等于罐内全部液体的转动惯量,而静止液体的转动惯量为0.研究发现液体货物的惯性积数值较小,而转动惯量的数值较大.因此,忽略液体货物的惯性积.
求解液体货物关于其质心坐标系的角动量,并对角动量求导,得到液体货物关于其质心坐标系的惯性力矩:
(18)
式中:Ixc,Izc分别为液体货物关于其质心坐标系的侧倾和横摆转动惯量;ic,jc,kc分别为沿xc,yc,zc正方向的单位向量.

图3 液罐汽车横摆力矩分析
2.3.4液罐汽车横摆力矩平衡方程 作用于液罐汽车上的侧向惯性力、横摆惯性力矩以及侧向外力如图3所示.车辆稳态转向时,绕车辆z轴的惯性横摆力矩和外力矩保持平衡.惯性横摆力矩可利用式(16)~(18)中k向分力矩获得.由此,液罐车惯性横摆力矩和外力矩的平衡方程为
mfe2af+mpe2apend=2(Fflf-Frlr)
(19)
式中:lf,lr分别为车辆装载货物后整车质心到前轴和后轴的距离.将各部分质量的侧向加速表达式代入式(19)得液罐汽车的横摆力矩平衡方程:
2(Fflf-Frlr)-vr(mtc+mue+mfe2+mpe2)+
(20)
2.3.5液罐汽车侧倾力矩平衡方程 作用于液罐汽车上的侧倾惯性力、侧倾惯性力矩和侧倾外力如图4所示.车辆稳态转向时,绕车辆x轴的惯性侧倾力矩和外力矩保持平衡.据此,获得罐车惯性侧倾力矩和外力矩的平衡方程为
mpgapcosθ
(21)
式中:kφ为悬架角刚度;cφ为悬架角阻尼.

图4 液罐汽车侧倾力矩分析
将各部分质量的侧向加速度表达式代入式(21)后获得液罐汽车的侧倾力矩平衡方程:

φg(mths+mfH1+mpH)+
(mths+mfH1+mpH)vr-
(22)
综上,由式(12),(15),(20),(22)构成液罐汽车的4自由度动力学模型.模型自由度有4个,分别为车辆本体的横摆角速度、质心侧偏角、车身侧倾角以及钟摆摆角.
3 液罐汽车动力学特性分析
基于所构建的液罐汽车动力学模型,在TruckSim中搭建用于仿真分析的液罐车模型.TruckSim中液罐车模型的搭建包括车辆本体设置、静止液体质量的施加、钟摆的参考点设定以及钟摆模型VS Command指令编写4部分.
以一款常用罐车为例,其车长为8.6 m,罐体横截面面积为2.5 m2,罐体长度为5.8 m;车辆驱动形式为6×4,后轮驱动,后轴为并装双轮.设定液体货物的密度为 1 000 kg/m3.其他基本参数如表1所示.
设计了3种椭圆柱罐体,其长短轴之比分别为1,1.5及2(国标规定椭圆柱罐体的长短之比不得超过2).罐体尺寸如表2所示.
选取与罐车具有相同基本参数和货箱横截面积的普通载货汽车(NT)为对比车辆.货箱横截面为正方形.载货量同样用充液比(货物高度与货箱高度的比值)描述.在相同的充液比条件下,罐车与普通载货汽车具有相同的载质量.

表1 液罐汽车基本参数

表2 罐体尺寸
选择角阶跃试验研究车辆的动力学响应.试验中,车辆的方向盘转角为180°,阶跃时间1.0 s,转向系传动比约为25∶1.
3.1 车辆操纵响应
车辆行驶速度为25 km/h,充液比为0.5时,角阶跃试验下液罐汽车与普通载货汽车的动力学响应如图5所示,图中t为时间,lmax为轮胎最大横向载荷转移率.
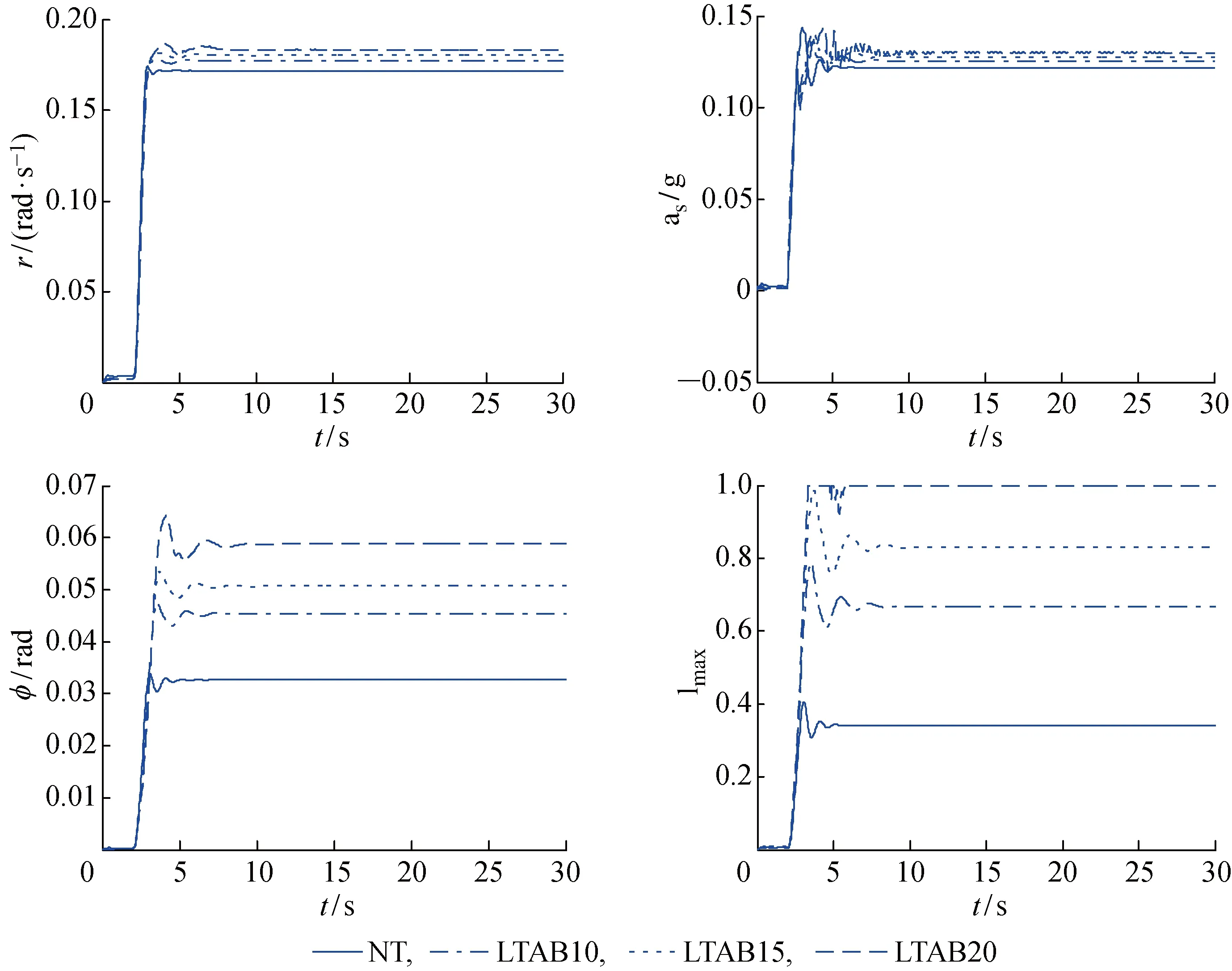
图5 液罐汽车与普通载货汽车的角阶跃响应
与普通载货汽车相比,液罐汽车的侧向和侧倾稳定性均有不同程度的下降.其中,侧向稳定性(横摆角速度和侧向加速度)的下降幅度较小,约为4.5%~8.2%;侧倾稳定性(横向载荷转移率和车身侧倾角)的下降幅度较大,约为40%~200%.
在该试验条件下,LTAB10的车身侧倾角和轮胎最大载荷转移率最大,LTAB15次之,LTAB20具有最小的车身侧倾角和轮胎最大转移率.此时,罐体长短轴之比越大,罐车侧倾角和横向载荷转移率越大,表明罐体形状对液罐车的侧倾稳定性有很大影响.
3.2 车辆临界稳定车速
角阶跃试验条件下,液罐车与普通载货汽车的临界稳定车速如图6~7所示,图中vth为临界稳定车速,δ为液罐车与普通载货汽车在相同工况下的临界稳定车速的偏差.
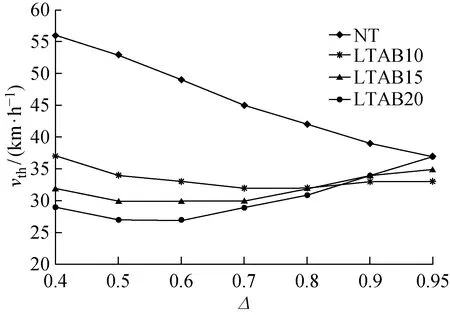
图6 液罐车与普通载货汽车的临界稳定车速

图7 液罐车与普通载货车相比的临界稳定车速的下降幅度
与普通载货汽车相比,液罐汽车的临界稳定车速有大幅下降.在充液比小于0.7时,液罐车临界稳定车速的下降幅度均大于30%.
对于普通载货汽车,临界稳定车速随着充液比的增加而逐渐下降;对于液罐汽车,随着充液比的增加,临界稳定车速呈先下降,后略有上升的趋势.充液比为0.5时,罐车临界稳定车速仅为普通载货汽车的50%~65%.可见充液比为0.4~0.7时罐车处于较差的装载状态.
罐体形状会对液罐汽车行驶稳定性产生重要影响.充液比小于0.8时,罐体的长短轴之比越小,罐车临界稳定车速越高;充液比大于0.8时,罐体长短轴之比越大,罐车临界稳定车速越高.实际生产中,如果罐体充液比绝大多数情况下都在0.8以上,推荐罐车装配长短轴之比较大的椭圆柱罐体.如果罐体充液比会在较大范围内变化,则推荐罐车装配圆柱罐体.
根据式(22),在相同的冲击条件下,钟摆小球质量mp及其长轴半径ap决定了钟摆的冲击强度.求解钟摆小球质量与整车质量的比值以及钟摆长轴半径与罐体长轴半径的比值,分别如图8和图9所示.充液比从0.1增加至0.9时,质量比值呈先上升、后下降的趋势,该趋势与液罐车临界稳定车速的变化趋势相反;而半径比值呈单调下降的趋势.因此,参与冲击的液体质量占罐车总质量的比值是影响液罐车行驶稳定性的关键.
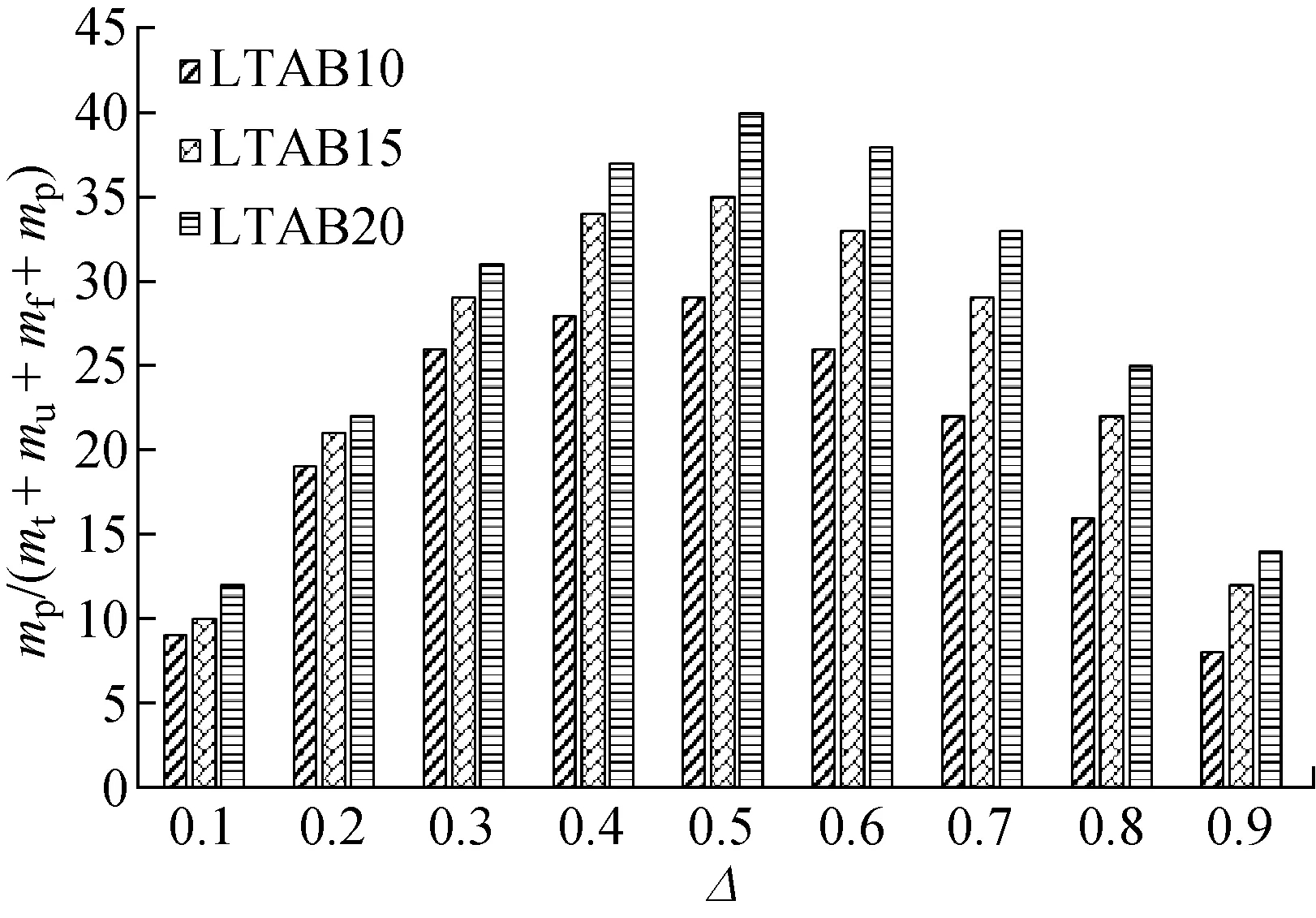
图8 钟摆小球质量与罐车总质量的比值

图9 钟摆短轴半径与罐体短轴半径的比值

图11 无量纲阻尼系数对液体晃动及液罐车动力学响应的影响
3.3 车辆过多转向特性
车辆行驶速度为25 km/h,试验条件为角阶跃下,与普通载货汽车相比,液罐汽车的转弯半径有所下降(见图10),图中δ′为液罐车与普通载货汽车在相同工况下的转弯半径的偏差.罐车表现出轻微的过多转向特性.充液比为0.4~0.5时,罐车转弯半径的下降幅度最大,其过多转向特性最显著;且罐体长短轴之比越大,罐车过多转向越严重.
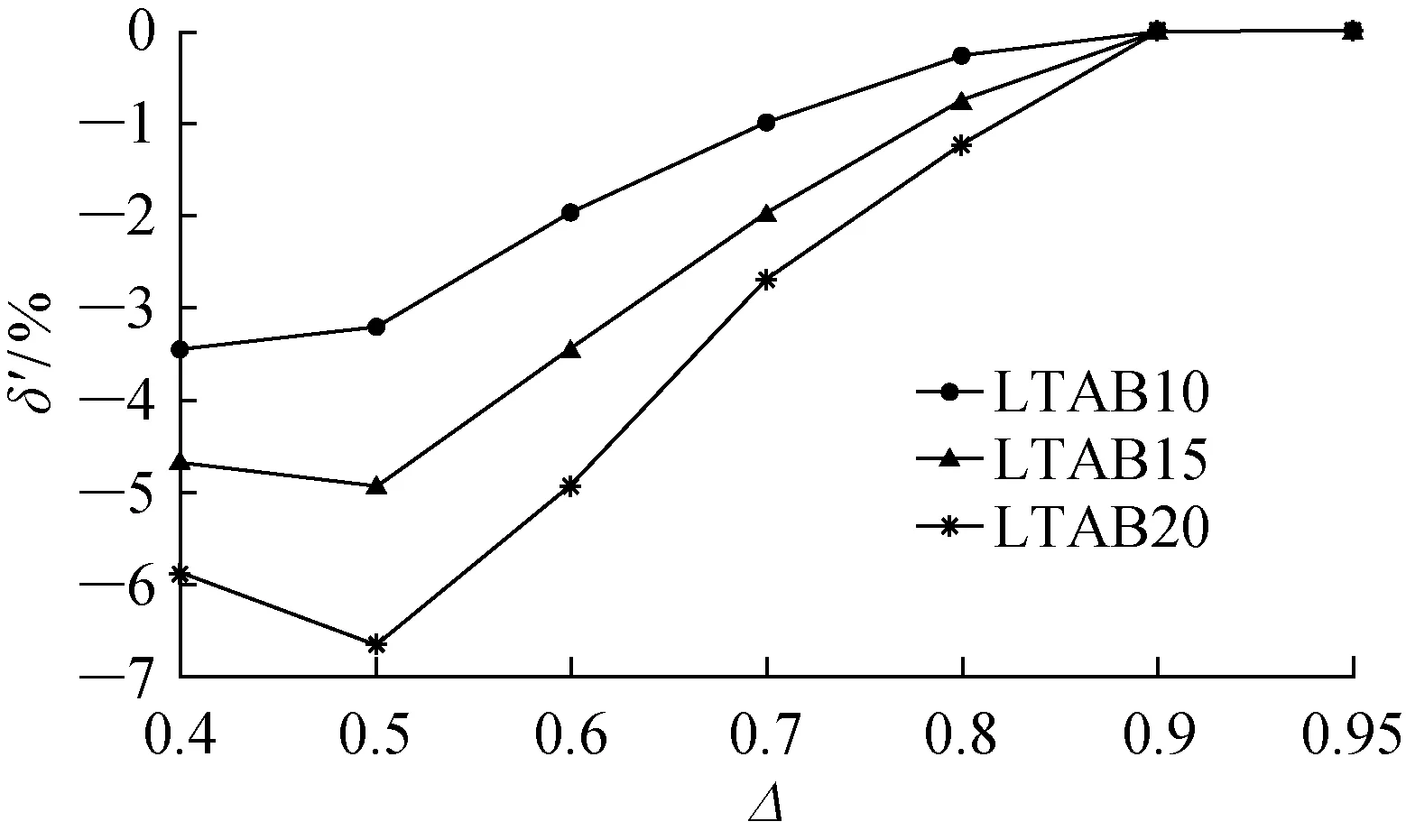
图10 与普通载货汽车相比,液罐汽车转弯半径的下降幅度
3.4 液体晃动无量纲阻尼系数对车辆操纵响应的影响
罐体装载的液体种类发生变化时,液体侧向晃动的无量纲阻尼系数发生变化,其受液体种类、充液比、罐体形状以及外界激励强度的影响.Fluent仿真表明,水、机油和甘油(运动黏度分别为0.001,0.2,0.799 kg/(m·s))在论文所研究的罐体形状、充液比以及外界激励强度下,无量纲阻尼系数的变化范围约为0~0.1,0~0.2和0~0.6.为此,考察罐体充液比为0.5、液体晃动的无量纲阻尼系数分别为0和0.5时,液体晃动以及罐车动力学响应,结果如图11所示,图中FLLS为液体侧向冲击力,MLLS为液体侧向冲击力矩.
液体晃动的无量纲阻尼系数由0增加到0.5时,3种罐体内的液体晃动稳态时间显著降低,下降幅度分别为32.8%,38.5%和43.4%;液体冲击力及力矩的超调量下降幅度约为8.7%,10.1%和16.2%,而其稳态值的下降幅度均小于1%.
液体晃动特征的变化引起罐车动力学响应的改变.无量纲阻尼系数由0增加至0.5时,LTAB10,LTAB15及LTAB20罐车侧倾角稳态值的下降幅度为5%,5.5%,2.9%,超调量的下降幅度为1.2%,38.4%,78.8%.可知,液体晃动无量纲阻尼系数的增加降低了罐车动力学响应的超调量,且罐体的长短轴之比越大,超调量的下降幅度越大.
4 结论
本文构建了能准确反映液体晃动与车辆运动耦合作用的液罐汽车动力学模型,建模过程中考虑了液体晃动的阻尼特性.在此基础上,研究了液罐车的动力学响应特性.
(1)液体侧向晃动显著降低了液罐汽车的侧倾稳定性,而对其侧向稳定性的影响较小.与普通载货汽车相比,液罐汽车的临界稳定车速显著下降.充液比小于0.7时,液罐车临界稳定车速的下降幅度大于30%;当充液比为0.5时,下降幅度高达35%~50%.与普通载货汽车相比,液罐汽车有轻微的过多转向特性;且罐体长短轴之比越大,过多转向越显著.
(2)参与冲击的液体质量占整车总质量的比值是影响液罐车行驶稳定性的关键因素,该比值受到罐体形状和充液比的影响.绝大多数情况下,罐体充液比大于0.8时,推荐液罐车装配长短轴之比较大的椭圆柱罐体;罐体充液比在较大范围内变化时,推荐罐车装配圆柱罐体.为保障行驶安全,液罐车应尽量避免充液比为0.4~0.7的状态.
(3)罐车装载不同种类的货物时,液体晃动的无量纲阻尼系数越大,车辆动态响应的超调量越小,所需的稳态时间越短;且罐体的长短轴之比越大,该作用越显著.
猜你喜欢
中国特种设备安全(2022年8期)2022-11-20
天津建设科技(2022年1期)2022-03-07
文萃报·周五版(2019年19期)2019-09-10
专用汽车(2018年10期)2018-11-02
汽车实用技术(2018年15期)2018-08-29
奥秘(2016年11期)2016-12-17
中国新闻周刊(2015年35期)2015-10-08
专用汽车(2015年4期)2015-03-01
环球时报(2009-04-15)2009-04-15
物理教学探讨(2009年2期)2009-03-30