
混合励磁磁通切换永磁电机初始位置检测方法比较
2020-08-01 09:18牛大强
微电机 2020年7期
牛大强,刘 旭,曹 阳
(1.省部共建电工装备可靠性与智能化国家重点实验室(河北工业大学 电气工程学院),天津300130;2.河北省电磁场与电器可靠性重点实验室(河北工业大学 电气工程学院),天津 300130)
0 引 言
由于混合励磁磁通切换永磁(Hybrid Excited Switching Flux Permanent Magnet, HESFPM)电机具有高功率密度、高效率、磁场易调节等优点,因此在新能源汽车、航空航天、工业控制等领域表现出很大的应用潜力[1]。无论采用相对位置编码器还是无位置传感器技术,都需要检测转子的初始位置。位置检测不准确,可能会使电机无法起动,降低电机的控制性能。
与永磁同步电机相比,HESFPM电机仅增加了一个附加的励磁绕组,因此HESFPM电机的初始位置检测可以参照永磁同步电机的初始位置检测原理。国内外学者对永磁同步电机初始位置检测方法展开了大量的研究[2-13]。文献[4]利用高频信号注入的方法实现了12/10磁通切换永磁电机的初始位置检测。文献[5]提出了转子定位法,通过施加固定位置的电流矢量将转子拖到预定位置,该方法不可避免地造成转子转动,振动等问题。文献[6]利用电感参数识别方法,通过辨识的电感参数计算出转子的初始位置,但其对于电感的计算比较复杂,初始角度估计精度较差。文献[7-8]采用旋转高频信号注入法,向电机的α-β静止坐标系注入正弦高频电压信号,检测高频电流响应,利用电机凸极效应估计转子位置信息。文献[9-10]采用高频脉冲注入法,向电机的d轴注入高频电压信号,检测q轴高频电流并经过位置观测器得到转子位置信息。文献[11]提出了一种结合载波频率成分的虚拟脉振高频注入法,该方法通过引入载波频率成分减少了位置检测时间。文献[7-11],均只能提取出转子磁极位置,而无法对磁极的极性进行判断。需要在检测初始位置时额外注入脉冲电压,利用磁饱和效应辨识转子NS极[12-13]。
本文结合永磁同步电机初始位置检测方法,进一步探究了HESFPM电机的初始位置检测性能,以HESFPM电机为控制对象,在电机d轴、q轴分别注入高频电压信号来估计转子位置。在电机d轴注入高频电压信号时,通过采集q轴电流来获得转子初始位置;在q轴注入高频电压信号时,通过采集励磁绕组的电流信号来获得转子初始位置信号。通过对两种初始位置检测方法的比较,研究适合应用于HESFPM电机的初始位置检测方法,并通过12/10 HESFPM电机进行实验验证。
1 HESFPM电机数学模型
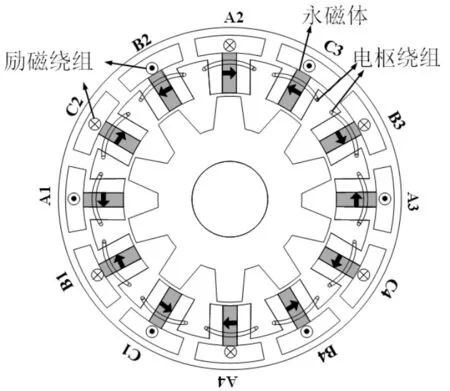
图1 HESFPM电机的拓扑结构图
HESFPM电机结构图如图1所示,同传统磁通切换电机相比,该电机增加了直流励磁绕组,通过向直流励磁绕组施加电流可调节气隙磁密。根据磁链与电流之间的关系,HESFPM电机三相磁链方程为
(1)
式中ψa、ψb、ψc分别为三相电枢绕组的磁链;ψpma、ψpmb、ψpmc分别为三相电枢绕组的永磁磁链;ia、ib、ic、if分别为三相电枢绕组的相电流和励磁电流;Laa、Lbb、Lcc为电枢绕组自感;Mab、Mac、Mba、Mbc、Mca、Mcb为电枢绕组间互感;Maf、Mbf、Mcf、Mfa、Mfb、Mfc为电枢绕组与励磁绕组间互感。
由于HESFPM电机的直流励磁绕组可以看成一套独立的励磁电源,励磁绕组与电枢绕组间的互感为
(2)
式中,Msf为励磁绕组与三相电枢绕组间的互感幅值。
永磁体磁链为
(3)
式中,ψpm为永磁磁链在三相绕组上的幅值。
将静止坐标系下的三相磁链经坐标变换转变为d-q旋转坐标系下为
式中,ψd、ψq分别为旋转坐标系下直轴和交轴磁链;Ld、Lq分别为旋转坐标系下直轴和交轴电感;id、iq分别为直轴和交轴电流;C3s/2r为静止坐标系到旋转坐标系的变换矩阵;C2r/3s为旋转坐标系到静止坐标系的变换矩阵。在d-q旋转坐标系下,HESFPM电机的电枢电压和励磁绕组电压方程为
(5)
式中,R、Rf分别为电枢绕组和励磁绕组电阻;ωe为电机转子电角速度。
2 基于高频电压信号注入的初始位置检测
2.1 基于d轴高频电压信号注入初始位置检测方法
基于d轴高频电压信号注入的初始位置检测方法通过向d轴注入高频信号,采样q轴的高频电流,经过位置观测器辨别出转子位置。
当电机处于静止时,注入高频信号频率一般远高于基波频率,且转子转速为零,因此忽略电枢绕组电阻后,高频激励下的HESFPM电机数学模型为
(6)
式中,Lfh、Msfh为励磁线圈高频自感和定子线圈与励磁线圈高频互感幅值;udh、uqh、idh、iqh分别为d-q轴下高频电压信号和高频电流分量;ufh、ifh为励磁绕组高频电压信号和高频电流分量。


图2 不同坐标系之间的关系
由图2可知,估计旋转坐标系和真实旋转坐标系间的转换矩阵为
(7)
由式(6)和式(7)可求出估计角度旋转坐标系下高频电流分量为
(8)

仅向d轴绕组中注入高频电压信号,由式(8)可求得包含转子位置误差的q轴高频电流分量为
(9)

在转子处于静止条件下,向估计d轴中注入高频方波电压信号,形式如下:
(10)


图3 注入电压与采样电流信号波形

(11)
其中,l、l+1代表相邻的电流采样时刻。
在半个采样周期内,由式(9)可得,包含转子位置误差的q轴高频电流分量为
(12)

采用解耦函数(-1)n对高频电流差值信号进行解耦,可得到关于估计角度误差的函数为

(13)
初始位置估计算法如图4所示,解耦后的估计角度误差函数作为PI位置观测器的输入信号,经过PI位置观测器,实现估计位置的收敛。
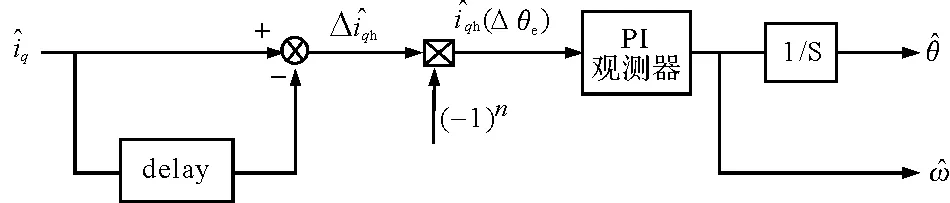
图4 位置识别观测器框图
2.2 基于q轴高频电压信号注入初始位置检测方法
由式(4)可得,HESFPM电机的磁链方程可表示为式(14)。其中,在等效d轴绕组和励磁绕组间存在互感,励磁绕组与等效q轴绕组间无互感作用。
(14)
在d-q旋转坐标系下,HESFPM电机的电压方程为
(15)
电机处于静止并注入高频信号条件下,电机电角速度为零,并且忽略电阻压降的影响,HESFPM电机的高频数学模型如图5所示,当等效直轴电路中存在高频电流时,励磁绕组中将感应出高频电流,等效交轴电路与励磁绕组电路无交链部分。

图5 HESFPM电机高频等效电路


图6 基于q轴高频电压信号注入坐标关系图
向估计坐标系下的q轴绕组中注入高频电压信号,真实d、q轴以及励磁绕组上的高频电压分量为
(16)
将式(16)带入式(6)中,可得电机的高频模型为
(17)
由式(17)可得包含转子估计位置误差信息(Δθe)的励磁电流为
(18)
在转子静止条件下,向估计q轴中注入高频方波电压信号,形式如下:
(19)
在半个采样周期内,由式(18)可得,包含转子位置误差的励磁绕组高频电流分量为
(20)

对高频电流差值信号进行解耦,可得到关于估计角度误差的函数为
(21)
同基于d轴高频电压信号注入方法相同,解耦后的电流信号作为位置观测器的输入,从而实现初始位置的估计。
3 两种方法位置观测器收敛性的分析比较
位置估计原理如图7所示,估计位置误差函数作为PI位置观测器的输入,经PI位置观测器输出估计的位置角度。文中分别对基于d轴高频电压信号注入和基于q轴高频电压信号注入两种方法进行对比分析。
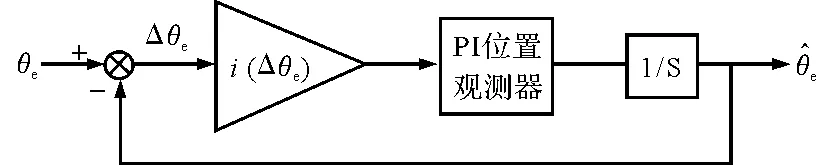
图7 位置估计原理图
3.1 基于d轴高频电压信号注入方法分析
由式(13)可得,基于d轴高频电压信号注入初始位置检测方法,经过解耦后的误差函数为
(22)


图8 基于d轴信号注入估计误差函数关系
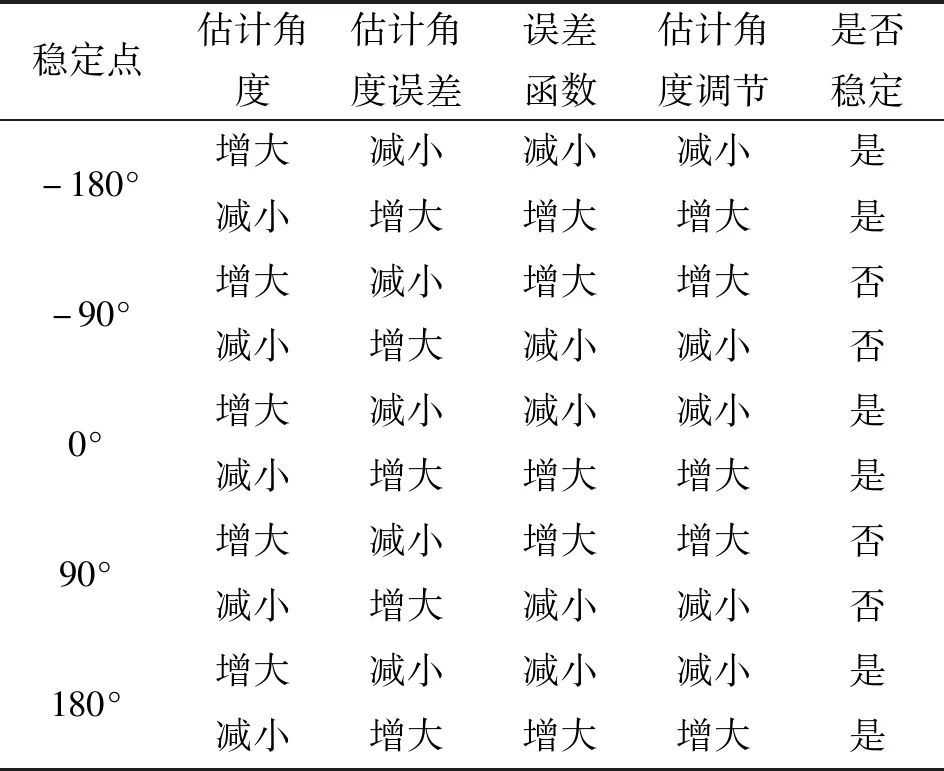
表1 基于d轴高频电压信号注入稳定工作点分析
采样q轴高频电流,经过位置观测器收敛,估计角度误差会收敛到0°和180°位置。估计角度误差为180°时,将会使电机反转并导致系统崩溃,因此需要对转子磁极进行判断使估计角度误差唯一收敛到0°位置。采用正负脉冲信号注入判断转子磁极极性是基于非线性磁饱和实现的。电枢磁链与永磁磁链同方向时,定子铁心饱和程度加重,d轴电感减小,激励电流矢量增大。当电枢磁链与永磁磁链反方向时,d轴电感增加,激励电流矢量减小。其步骤可简要整理为:

初始位置识别框图如图9所示。

图9 基于d轴注入初始角度识别框图
采用该方法,估计角度误差收敛在0°和180°两个位置,为了得到唯一的初始位置,需要进一步判断磁极极性,工程实现复杂,收敛时间长。
3.2 基于q轴高频电压信号注入方法分析
基于q轴高频电压信号注入的初始位置检测方法,经过解耦后的误差函数为
(23)


图10 基于q轴信号注入估计误差函数关系
由上述分析可知,基于q轴注入的初始位置检测方法,估计位置误差唯一收敛到0°位置,省去了磁极极性判断的步骤,工程实现简单。
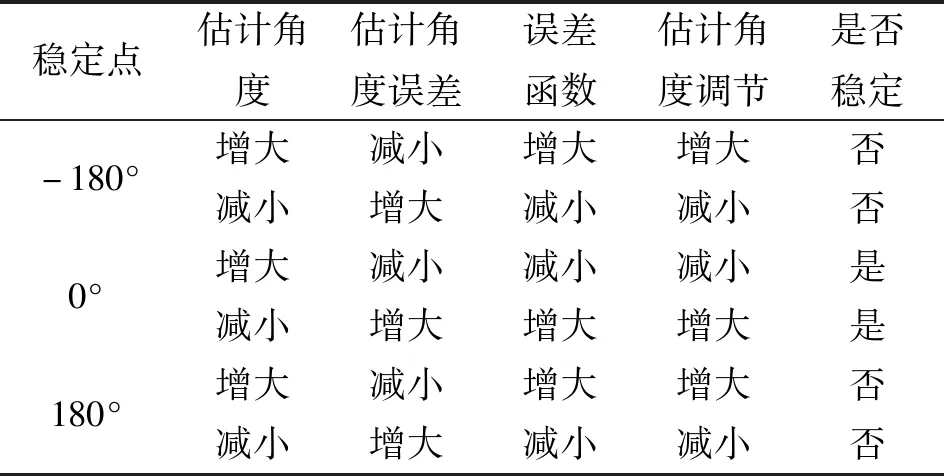
表2 基于q轴高频电压信号注入稳定工作点分析
4 实验结果与分析
为了验证提出方法的有效性,基于dSPACE搭建了电机初始位置检测的实验平台,如图11所示。控制对象为一台12/10 HESFPM电机,电机参数如表3所示。实验中通过安装光电位置编码器获得实际转子位置以进行对比。

图11 实验平台

表3 电机参数
为了验证基于d轴高频电压信号注入法检测转子初始位置在HESFPM电机控制系统中的有效性,以HESFPM电机为控制对象,进行初始位置检测实验。图12为基于d轴高频方波注入方法的初始角度识别波形。图12(a)中将电机转子固定在83°位置(转子位于N极区域),向d轴中注入2kHz方波电压信号,采用位置观测器收敛估计位置误差,将转子估计误差收敛到0°位置。然后利用正负脉冲注入法,判断转子磁极极性。如图所示|id1|>|id2|,即最终经过50ms确定转子位置为当前角度(89°),估计位置误差为6°。图12(b)为转子固定在232°位置(转子位于S极区域)的初始角度识别,通过位置观测器估计转子位置收敛到45°位置。向d轴绕组中注入正负脉冲信号,检测d轴电流|id3|<|id4|,即最终经过50ms确定转子位置为45°+180°(225°),位置估计误差为7°。进行多组实验,该方法位置估计最大误差为8.6°。

图12 基于d轴高频电压信号注入的初始角度识别
基于q轴注入高频电压信号的初始位置检测时,首先向q轴中注入2kHz高频方波电压信号,励磁绕组不施加高频电压信号。采样励磁绕组高频电流作为位置观测器的输入信号,进而实现位置的估计,当励磁绕组高频电流包络线为零时,估计角度误差收敛到0°。如图13所示,转子初始位置角度分别固定在40°(N极区域)和195°(S极区域)两个位置,估计转子位置经过20ms的时间分别收敛到36°(估计误差为4°)和200°(估计误差为5°)位置,且无需磁极极性判别。进行多组实验,位置估计误差最大值小于6.3°,满足电机启动要求。同基于d轴注入的方法相比,该方法省去了磁极极性判别的步骤,工程实现简单,位置估计速度快。

图13 基于q轴高频电压信号注入的初始角度识别
5 结 论
本文比较了两种基于高频电压信号注入的HESFPM电机初始位置检测方法。通过向估计坐标系下的d、q轴中注入高频电压信号,分别采集q轴和励磁绕组高频电流估测转子位置。通过比较发现,所提出的基于q轴高频电压信号注入的初始位置检测方法直接将估计位置收敛到真实值,省去了磁极极性判别的步骤,位置估计速度快。
猜你喜欢
大电机技术(2022年3期)2022-08-06
大电机技术(2022年2期)2022-06-05
防爆电机(2022年1期)2022-02-16
防爆电机(2021年6期)2022-01-17
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
电子制作(2018年1期)2018-04-04
北京航空航天大学学报(2017年6期)2017-11-23
电子制作(2017年1期)2017-05-17
电子制作(2017年24期)2017-02-02
