
永磁同步电机五参数同时辨识方法研究
2020-08-01 09:18胡卫平刘细平邹永玲
微电机 2020年7期
胡卫平,刘细平,邹永玲
(江西理工大学 电气工程与自动化学院,江西 赣州 341000)
0 引 言
由于在过去十年中对永磁材料的改进,永磁同步电机在体积、重量、转矩、功率密度等方面较其他电机处于领先,这些优势使得其在工业上得到了广泛的应用[1]。在PMSM高性能控制系统中,参数精度是影响整个系统控制精度的重要因素[2],尤其是定子绕组电阻,交直轴电感,永磁体磁链,转动惯量等关键参数。由于PMSM控制驱动系统是一个非线性、多变量的时变系统,在实际工况运行中,定子绕组电阻、交直轴电感和永磁体磁链参数受环境温度、磁饱和、负载扰动的影响会发生变动[3],转动惯量随机械载荷的尺寸和形状而变化[4],这些参数的任何变化都会影响系统的运行状态,此外,任何电气参数的变化也被认为是系统运行状态变化的一个指标,因此,又可用来评价PMSM的健康状况[5]。例如,匝间短路会导致定子绕组电阻,交直轴电感的突变[6],退磁会导致基反电动势的幅值减小[7]。总之,准确辨识PMSM参数对提高电机总体性能有着重要的意义。
近年来,国内外学者对PMSM参数辨识进行了深入的研究,并提出不同的参数辨识方法。主要有最小二乘法[8-9],扩展卡尔曼滤波[10],模型参考自适应[11],粒子群算法[12],神经网络[13],模型预测控制算法[14]等。文献[8]在传统的最小二乘法上引入“折息因子”,能增强算法对噪声干扰的鲁棒性。文献[9]提出一种遗忘因子的递推最小二乘法,并分析了遗忘因子的大小对算法辨识精度与收敛速度的影响。文献[10]提出一种辨识PMSM转子位置和转速的扩展卡尔曼算法,但该算法存在一阶线性化精度低的缺点,在较高的非线性系统中,辨识效果不佳。文献[11]考虑逆变器死区效应的影响,将死区压降补偿到模型参考自适应律以提高算法的准确性与稳定性。文献[12]提出柯西变异与平均最好位置相结合的改进粒子群算法,但没有解决PMSM数学方程欠秩问题。文献[13]使用变步长自适应线性神经网络辨识方法,然而,神经网络对训练数据样本非常敏感,辨识精度受训练数据的影响。文献[14]提出改进模型预测控制算法的参数辨识方法,能保证参数辨识的稳定性和收敛性。以上PMSM辨识方法中的辨识参数为3~4个,辨识参数较少。
由于PMSM电气方程是一组含有四个未知数(定子绕组电阻,交直轴电感,永磁体磁链),秩为二的欠秩方程组,在方程欠秩条件下,算法不能同时辨识出两个以上的参数,对此,多数学者通过在d轴注入弱磁负序电流,解决了欠秩问题,但只能同时辨识3-4个参数,原因为PMSM电气方程中只有4个待辨识参数。本文在设计PMSM辨识方程时,将机械方程与电气方程合在一起,设计了含定子绕组电阻,定子绕组交直轴电感,永磁体磁链,转动惯量五个参数的离散满秩方程组,运用PSOBC可同时精确辨识五个参数。
1 PMSM数学模型
文献[15]用实验分析得出,当运行电机处于低速(100r/min)运行时,电压源逆变器非线性因素对辨识精度影响较大,而处于高速运行时,影响较小,本文中采集的数据均为电机高速运行时的数据,因此,可忽略逆变器非线性因素。PMSM为一种多变量、非线性、强耦合的系统,可分为电气和机械两个子系统,在同步旋转d-q轴坐标系下数学方程通常描述为
(1)
式中,ud、uq和id、iq分别为定子dq轴电压、电流;Ld、Lq为定子绕组dq轴电感;R、ψf为定子绕组电阻、永磁体磁链;p、ωe为极对数、电角速度;Te、Tm为电磁转矩、负载转矩;J、B为转动惯量、阻尼系数。
当电机处于恒转速、转矩运行时,id、iq、ωe值较为稳定,可以近似描述为
此时状态数学模型为
(2)
将上述方程中Te化简得到:
(3)
方程(3)为含有5个待辨识参数(R、Ld、Lq、ψf、J),秩为3的方程组,方程组无唯一可行解,本文通过在d轴注入id≠0的负序弱磁方波电流策略,如图1所示。

图1 数据采样图
图1中的一个周期数据采集实现一次参数辨识,将采集的数据经上位机传递给辨识算法,可实现在线辨识。在注入id=-2A的弱磁方波电流策略下的离散方程组为
(4)
方程组(4)中,ud0(k),iq0(k),uq0(k),ωe(k),Tm(k)和ud1(k),iq1(k),uq1(k),id1(k)分别为图1中t2-t3、t4-t5时间段第k次的采样数据。
2 PSOBC算法
2.1 基本粒子群算法(PSO)
1995 年由Eberhart 和Kennedy 博士提出的粒子群算法,起源于对鸟类族群觅食的研究。根据以下公式更新粒子位置和速度:
(5)
(6)

2.2 细菌趋化粒子群算法(PSOBC)
细菌对于化学刺激的反应对其生存有着重要的意义,其通过感知器官决定向有利环境前进或者逃离不利环境。该算法通过模仿细菌觅食过程中的排斥与吸引操作,维持迭代后期种群的多样性,能有效降低陷入局部最优。算法迭代过程中粒子的排斥操作速度更新式为
(7)
式中,Wi为粒子群群体历史最差位置,Wg为群体最差位置。
当种群过于分散时,由于吸引操作的存在,能加强种群的全局搜索能力,吸引操作公式为PSO更新式。当种群过密时,由于排斥操作的存在,会使种群个体发散到其他位置,能加强种群的局部搜索能力。
为了确定吸引与排斥在何种条件下的执行,引入多样型的度量公式:
(8)

PSOBC具体步骤如下:
(1)初始化各参数,种群规模,多样性调整范围[dlow,dhigh]。
(2)设当前迭代次数k=0,当前模式Mode=“attract-ion” 。
(3)计算各粒子适应度值。
(4)若diversity≤dlow, 令 mode=“repulsion”,若diversity≥dhigh, 令mode=“attraction”。
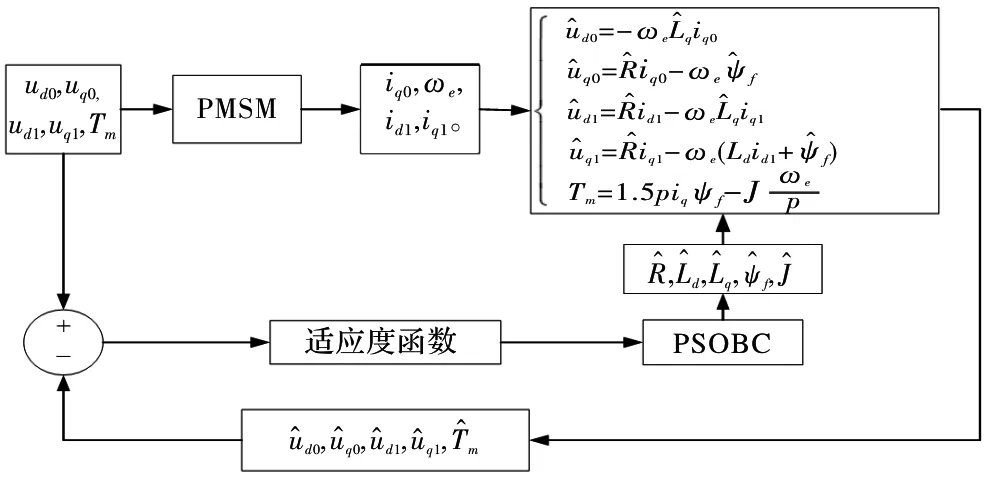
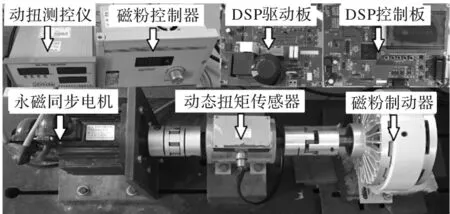
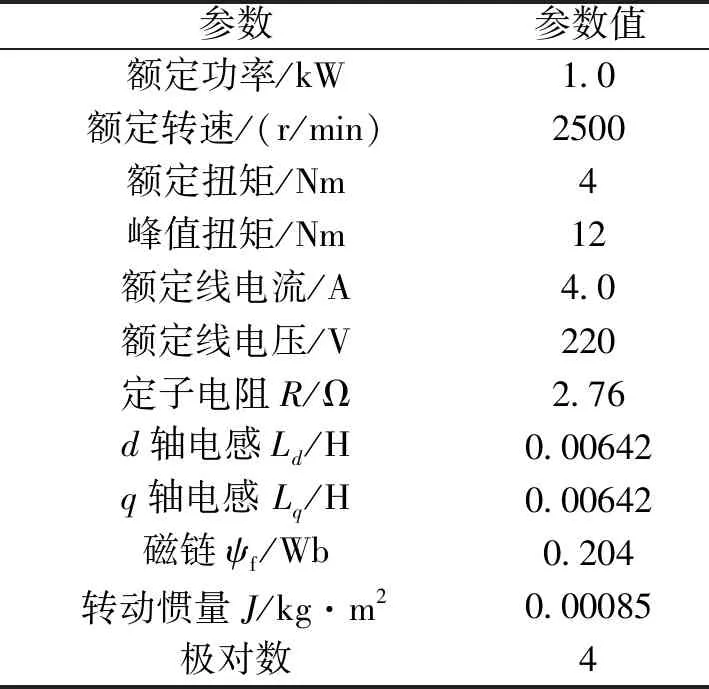
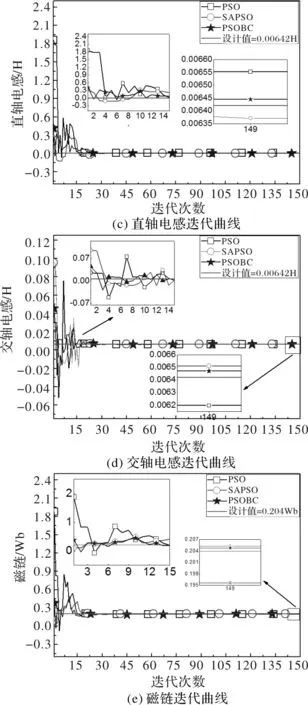
(5)若mode=“attraction”且f(Zik+1) (6)若mode=“repulsion” 且f(Zik+1)≥f(Zik),按式(7)更新速度,按式(6)更新位置。 (7)更新Pi,Pg,Wi,Wg。 (8)返回步骤3直到算法达到最大迭代次数。 PMSM参数辨识问题转化为系统优化问题,关键在于设计PMSM辨识目标函数。ud、uq、Tm被选为PMSM可调模型和测量信号的输入,PSOBC不断筛选待辨识参数最优值,使得可调模型与测量信号之间的目标函数值无线趋于零,此时,辨识参数值和实际值也无限接近。目标函数设计如下: a1、a2、a3、a4、a5为权重系数,对各个待辨识参数的精度起着重要作用。 图2 PSOBC辨识原理图 为了验证PMSM辨识模型的可行性和PSOBC辨识PMSM五参数的效果,搭建了图3所示的实验平台。 图3 实验平台 动态扭矩传感器采集转速、扭矩、功率等信号,并在动扭测控仪上输出数值。磁粉制动器是一种用于模拟负载的自动控制元件。PMSM各参数值如表1所示。 表1 PMSM参数值 为了验证电机在不同负载和转速工况下PSOBC辨识PMSM五参数的效果,与基本粒子群算法(PSO)和模拟退火粒子群算法(SAPSO)进行了对比。实验采集了转速2500r/min, 扭矩4Nm、转速2000r/min,扭矩4Nm和转速2500r/min,扭矩6Nm三种工况的数据,上位机接受数据后,再传递给基于VC++6.0的算法程序实现在线辨识。为确保实验对比的合理性,三种算法的三个初始参数均设为ω=0.5,c1=c2=2,所有算法的最大迭代次数,种群规模都相同,分别为150、100。实验数据采集共2000组,五个待辨识参数的初始范围为[0 10],远离实验电机设计值。所有实验独立运行30次,取其平均值作为最终辨识值。图4为转速2500r/min,扭矩4Nm工况下的辨识波形曲线。 图4 PMSM实验参数辨识曲线 表2 转速2500r/min,扭矩4Nm实验结果 表3 转速2000r/min,扭矩4Nm实验结果 表4 转速2500r/min,扭矩6Nm实验结果 从图4辨识曲线图可知,PSOBC的收敛速度、搜索精度好于PSO,SAPSO,其辨识值和电机设计值最接近。当算法处于迭代后期时,各粒子位置相对集中,由于PSOBC具有细菌排斥策略,能保存粒子种群的多样性,可以有效避免陷入局部最优。当电机运行速度为2000r/min时,三种算法的辨识精度较差,这主要是因为,电机转速较低,受电压源逆变器死区效应的影响较大,逆变器非线性因素导致的等效误差较大,采集电压与实际电压存在偏差,影响各参数的辨识精度。电机运行时易受环境的扰动,导致各辨识参数有一定的偏移,且采集的数据还受限于采样器的精度,使得PSOBC各参数辨识值与电机设计值略有一些微小的偏差。 本文在PMSM矢量控制id=0基础上,通过在d轴注入id=-2A的弱磁方波电流,使得机电数学五参数辨识模型达到满秩,实验验证了该辨识模型的可行性,运用细菌趋化粒子群能同时有效辨识定子电阻,电感,永磁体磁链和转动惯量参数,该算法在基本粒子群算法基础上加入细菌排斥策略,能有效降低粒子迭代后期陷入局部最优,从而提高其寻优性能。3 基于PSOBC算法的PMSM五参数辨识
4 实 验




5 结 论
猜你喜欢
防爆电机(2022年4期)2022-08-17
汽车实用技术(2022年2期)2022-02-21
防爆电机(2021年6期)2022-01-17
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
商品与质量(2020年41期)2020-11-09
商品与质量(2019年20期)2019-09-27
北京汽车(2018年5期)2018-11-07
电子制作(2017年1期)2017-05-17
中国新技术新产品(2014年4期)2014-01-24
