涡旋光位移干涉测量方法与信号处理
2020-11-13 03:20夏豪杰谷容睿潘成亮赵会宁
光学精密工程 2020年9期
夏豪杰,谷容睿,潘成亮,赵会宁
(合肥工业大学 仪器科学与光电工程学院,安徽 合肥 230009)
1 引 言
精密制造与纳米技术深度交叉融合是推动科技创新和发现前沿问题的主要途径之一。纳米精度跨尺度制造已成为工程技术不断突破的重要领域,其中激光干涉测量技术量值可溯源到长度基准,具有高精度非接触测量的特点,是跨尺度制造和精密测量领域最为重要的测量手段[1-2],近年来已应用到引力波探测[3-4]等新领域。为适应纳米技术测量需求,以英国NPL、德国PTB为首的研究团队对当前各类主要干涉仪进行比对测试,部分激光干涉仪可达到优于0.1 nm的测量分辨力,但在较长时间测量中稳定性普遍表现较差,对此欧盟2012年在欧洲计量研究项目Nanotrace支持下研发了测量分辨力小于10 pm的下一代干涉仪[5-6]。光源功率漂移、光学元件缺陷和电路信号噪声等问题是阻碍干涉测量精度向亚纳米级、皮米级发展的主要因素[7-8],因此非线性误差补偿成为干涉测量系统中的研究热点。国内外学者针对干涉正交信号的处理方法进行了大量研究,如使用硬件电路滤波,调整探测器增益、控制波片位姿等方式控制测量信号的稳定性[9-11];使用软件算法对非线性误差信号进行自适应校正,其中具有代表性的软件算法是Heydemann算法[12-15]和极值法[16]。前者使用最小二乘进行椭圆拟合计算误差参数以补偿正交信号,后者能够满足实时测量要求但无法校正非正交误差,基于此胡鹏程等结合FPGA将信号周期性误差控制在0.6 nm内[17]。以上信号处理方法主要关注高倍相位细分、均值计算以及非线性误差校正,难以大幅提升干涉测量信号的分辨力。
1994年,Allen和Barnett证实轨道角动量取决于螺旋相位拓扑荷数[18]。随着涡旋光束制备与检测技术的不断完善[19-22],Laguerre-Gauss光束、Bessel光束、超几何模式及超几何高斯模式[23-26]等常见涡旋光束,在光镊技术、光通信、数字成像及量子研究等领域的应用不断拓展[27-33]。除光束轨道角动量检测外,近年来涡旋光干涉原理常用于精密位移测量[34-35]。为了提高测量精度,本文改进已有涡旋光干涉测量结构,选用螺旋相位板及道威棱镜,搭建高分辨力涡旋光束干涉位移测量实验系统,并对干涉信号处理方法进行研究,与传统单频、双频激光干涉测量方法相比,原始干涉信号自身实现了更高的细分倍数,同时干涉信号电子细分处理方法由相位插值变为圆周角度细分,圆周具有360°的自然基准,避免了干涉信号质量对相位插值细分有效性的影响,从原理上提升了干涉仪测量的准确性。
2 涡旋光束干涉测量系统
2.1 涡旋光束干涉位移测量原理
涡旋光束干涉光路如图1所示,He-Ne激光器发出的光束经螺旋相位板(SPP)转换为携带轨道角动量的Laguerre-Gauss光涡旋束(记拓扑荷数l),经分光镜(BS)进入干涉仪两臂,测量臂中光束由H2直接回射,参考臂中光束经道威棱镜(DP)后携带相反拓扑荷数-l并由H1回射,两束拓扑荷数分别为l,-l的共轭涡旋光束在分光镜BS处重合并干涉。花瓣状干涉图案中干涉条纹圆周径向均匀对称分布,条纹个数为拓扑荷数绝对值的2倍(拓扑荷数值为4)。
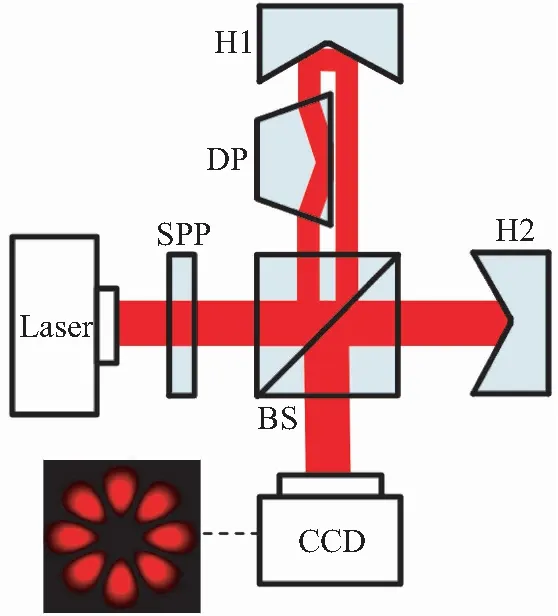
图1 涡旋光束干涉测量光路示意图Fig.1 Schematic diagram of interferometer using conjugate vortex beam
经螺旋相位板激光器发出的高斯光束由TEM00模式转换为TEM01轴向对称模式,将制备的Laguerre-Gauss光束电场表达式写为:
exp[iφ(r,z)]exp(ilθ).
(1)
拓扑荷数为l和-l的光束场强分别简写为:
El(r,θ)=Rl(r)exp(ilθ),
(2)
E-l(r,θ)=Rl(r)exp(-ilθ).
(3)
两束光在BS处汇聚,干涉光束电场振幅为:
El(r,θ)+E-l(r,θ)=2Rl(r)cos(lθ).
(4)
记测量臂位移δ,此时干涉光束为:
Rl(r)expi(lθ+2kδ)+Rl(r)exp(-ilθ)=
4|Rl(r)|2exp(2ikδ)(1+cos(2lθ+2kδ)),
(5)
其中|Rl(r)|2为径向光强分布,相位因子决定干涉图样的分布规律。由式(5)可知,测量臂引入位移δ时相位变化为2kδ,将被测位移量的相位变化与等角度均匀分布干涉图案的旋转角度一一对应,旋转方向随被测位移方向变化。涡旋光干涉仪中,被测位移移动λ/2对应干涉花瓣图案旋转一周2π,与传统迈克尔逊干涉仪中干涉条纹变化一个周期相对应。实验使用波长为632.8 nm的光源和拓扑荷数为4的螺旋相位板时,干涉图案旋转1°对应的被测位移量为0.88 nm。
2.2 干涉图案信号读取
被测位移与干涉图案绕中心旋转角度的线性关系,意味着干涉图案旋转角度测量精度是系统测量分辨力的直接决定因素。
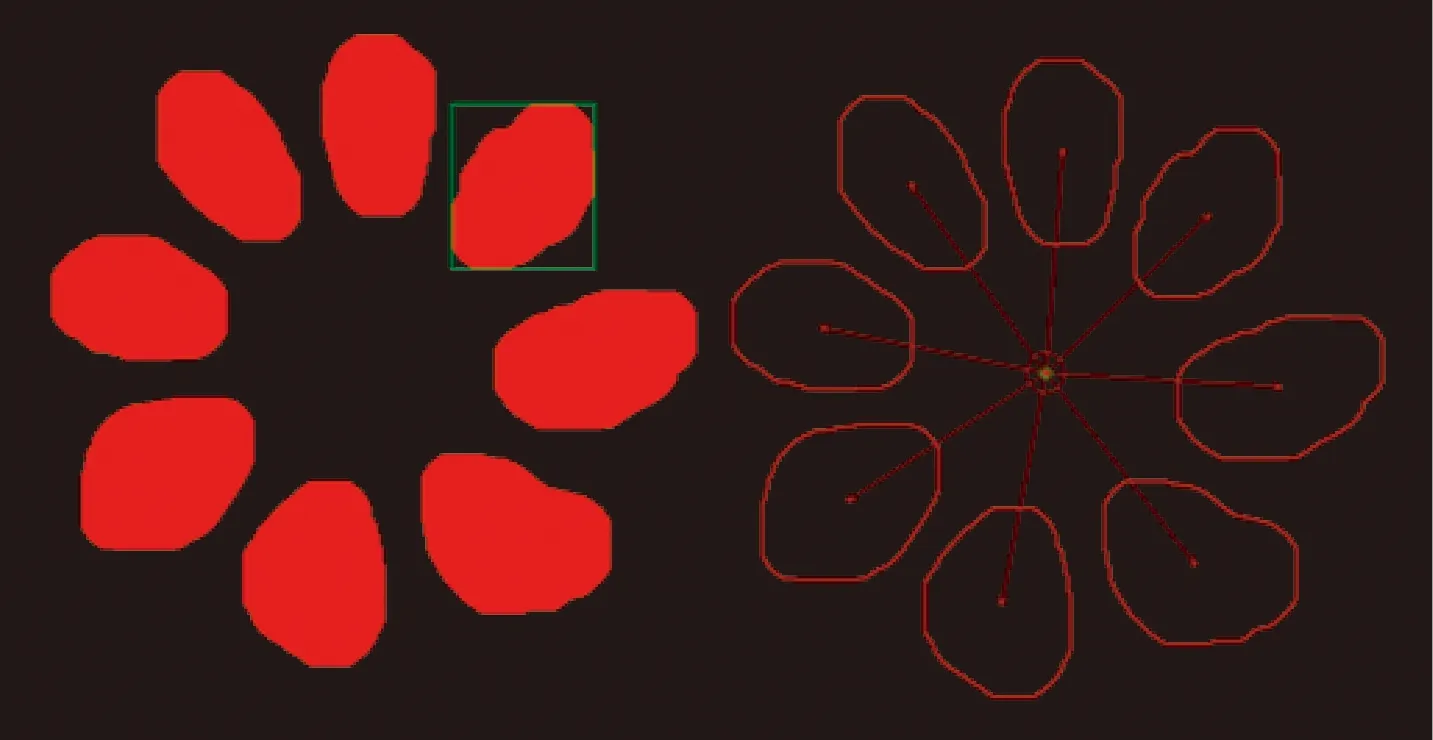
拓扑荷数值不同时,共轭涡旋光束的干涉图案如图2(a)所示,借助圆周360°自然基准,通过图像处理拟合定位各干涉条纹及干涉图案的旋转中心,可实现干涉图案旋转角度以及对应被测位移的高分辨力精密测量。干涉图案中干涉条纹愈多、分布愈均匀清晰,越有利于信号处理精度的提升。
光源使用波长为632.8 nm的氦氖激光器时,被测位移速度达到1 mm/s则干涉图案的旋转速度将超过3 000 r/s,如仅采用相机作为干涉信号接收器来完成高速实时测量,那么对相机采样频率、图像处理效率等提出巨大挑战。
为解决信号处理速度问题,本文使用高速光电检测模块对干涉图案旋转整周期计数,如图2(b)所示,使用在圆周均匀分布与干涉图案相匹配的4个PIN光电探测器,经光电转换和差分放大输出为周期电压信号,结合减法电路消除直流偏置影响,电路实现高速整周期计数。高速光电检测电路与低速相机采集信号图像处理相结合,构成高精度实时信号处理系统。
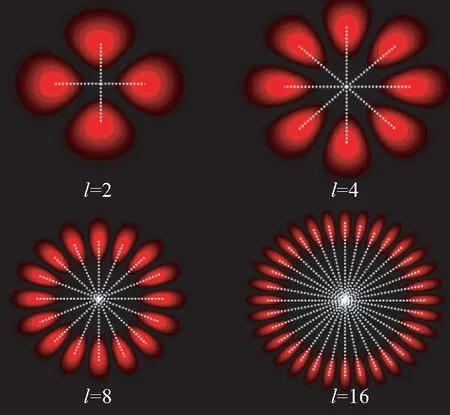
(a)干涉图案仿真
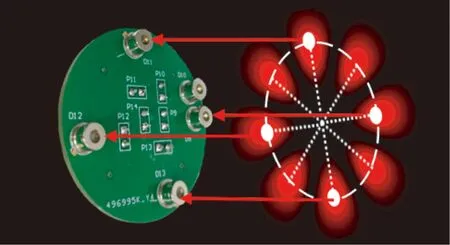
(b)电路实物图
2.3 干涉图案细分
为满足高精度测量需求,使用软件实时图像处理测量干涉图案的微小旋转角度,获得高分辨力测量结果。如图3(a)所示,以拓扑荷数为4时相机采集干涉图案为例,条纹分布清晰对称,但能观察到有明显杂散光和边缘干涉。
图像增强处理中使用自适应算法在各局部邻域内分别计算区域阈值,遍历图像以避免图像二值化过程中可能导致的条纹边缘特征损失。之后借助形态学操作削减杂散光对干涉条纹定位的影响,平滑干涉图案尖锐毛刺状边缘并填充微小间隙,腐蚀和膨胀在数学形式上可分别表达为:

(6)

(7)
通过形态学操作,在不影响干涉条纹位姿分布并保留各个条纹形位特征的前提下得到平滑为近似椭圆的条纹形状。清晰流畅的条纹边缘为边缘检测、定位及拟合等后续步骤提供较为理想的条件,有利于保证图像处理速度和实时测量效率。
实验证明,用图像区域质心代替圆拟合圆心作为干涉图案旋转中心时,定位结果更符合干涉条纹的真实分布情况。考虑长时间实时测量过程中可能出现的采集图像条纹分布不理想、条纹跳动等情况,在对干涉条纹中心及干涉图案旋转中心进行定位时,分别以各干涉条纹质心和视场内干涉图案的整体质心为定位点。形态学操作效果和干涉图案位姿定位效果如图3 (b)所示。

(a)相机拍摄结果
(b)图像处理
也可使用LabVIEW中Shape Matching函数进行处理,导入经图像增强、形态学操作处理后的图像作为模板,以模板为基准在整个区域中重新定位,由定位结果直接判断图像旋转角度的大小及方向。
2.4 干涉图案的稳定性
测量系统环境误差的引入、被测位移直线度、CCD相机的采样速度等均直接反映在干涉图案的变化中,如输出光束稳定性、干涉条纹中心对称分布程度、长时间测量中干涉图案的中心漂移等。根据360°自然基准和拓扑荷数l,以π/l为标准量对整组夹角测量结果的分布情况(计算标准差等作为评价标准)进行评价,以|l|=4时所采集的干涉图案为例,标准角度为45°,实际角度测量结果及分析如图4所示。
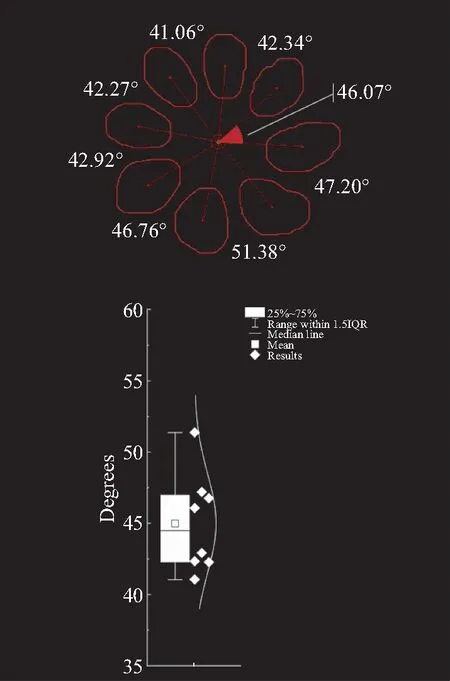
图4 角度测量结果分析Fig.4 Quality evaluation based on angle measurement
角度测量结果可用于量化测量干涉条纹分布的均匀程度,或在长时间测量中由多组连续角度测量结果的重复性判断干涉光束质量的稳定性。
通过对干涉图案拟合中心进行跟踪统计可以量化评估连续测量时中心位置的偏移程度。图5记录了对压电陶瓷皮米位移台(PZT)带动测量臂做台阶运动时3组采集图像的拟合中心位置(彩图见期刊电子版),能够观察到测量过程中拟合中心位置的变化过程。
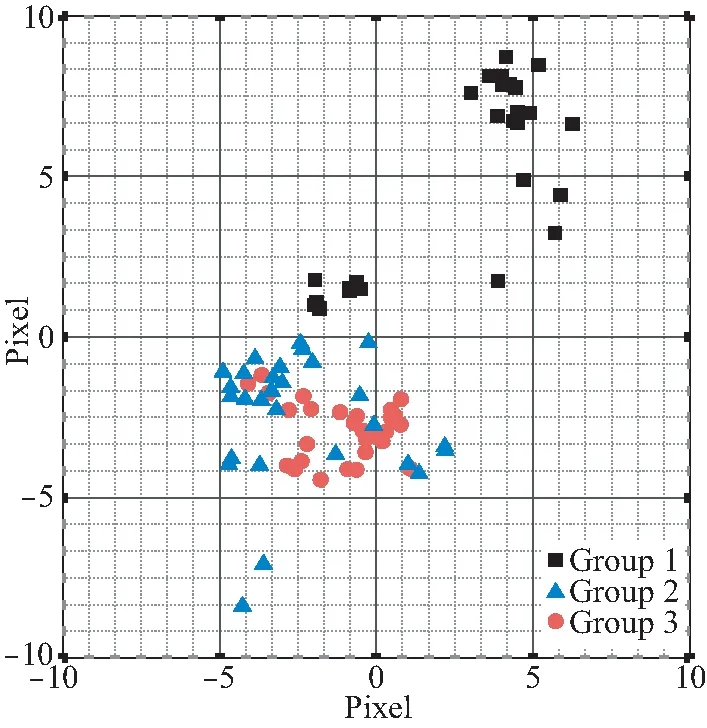
图5 干涉图案中心漂移测试Fig.5 Tracking measurement for fitting center of interferogram
参考线每格为1 pixel,其中黑色组数据(Group1)明显受到测量过程中干涉图案跳动、畸变的影响,中心漂移明显且分布不均。隔离振动等外界扰动后,蓝色、红色组信号有明显改善,红色组(Group 3)数据显示在单向PZT行程中干涉图案拟合中心的偏移不超过7 pixel。在严格控制变量的前提下,这些测量方法可用于测量对准误差、系统的稳定性和重复性、被测位移直线度等量值,或用于误差评定。
3 实验测试与分析
3.1 实验测试系统
涡旋光束干涉实验系统结构如图6所示。光源采用氦氖激光器(MG,λ=632.8 nm),经螺旋相位板SPP(Holo/Or VL-P,topological charge=4)后生成Laguerre-Gauss光束,经分光器(BS1)进入干涉仪两臂。参考臂中插入道威棱镜(DP)反转拓扑荷数并由H1回射,测量臂由压电陶瓷皮米位移台(Madcity Nano-METZ,位移分辨力为5 pm)提供皮米量级位移量。输出干涉信号经分光器(BS2)后一路由相机采集干涉图像进行细分处理,一路经扩束后由PIN光电探测器模块进行花瓣图案信号周期计数。

图6 涡旋光束干涉实验测试系统Fig.6 Experimental system of interferometry using vortex beams
基于LabVIEW实时采集PIN光电探测器信号和CCD干涉图案信号,搭建高精度信号处理系统。参考Nanotrace项目实验比对方法,即测量臂由皮米压电陶瓷位移台提供纳米台阶运动,由涡旋光束干涉仪测量结果与位移台位移对比进行干涉系统测量分辨力测试。普通实验室环境下,驱动PZT控制测量臂进行步长为1 nm的台阶运动,台阶运动测量结果如图7所示(彩图见期刊电子版),涡旋光束干涉仪输出测量结果(红色)显示测量分辨力优于0.5 nm。
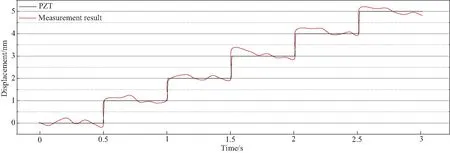
图7 台阶运动测量结果Fig.7 Measurement results of step movements
3.2 测试误差分析
涡旋光束干涉测量结构和传统干涉仪均以光波波长为基准。涡旋光束干涉测量系统的主要误差源有激光光源单色性、光功率稳定性、螺旋相位板均匀性、被测位移的直线度和干涉图案识别误差等。硬件上,选用单色性较好的稳频氦氖激光器保证波长测量的基准精度;通过整周期检测电路的对称设计和减法电路抑制光功率的稳定性误差。此外,螺旋相位板的波前调制均匀性直接影响花瓣圆周分布干涉条纹的形状和位姿分布;被测位移的直线度误差反映在干涉图案旋转中心偏摆,影响图案形状。由此产生的系统误差可通过图像处理进行补偿。软件上,干涉图案旋转角度测量的图像处理算法需适应光学元件不理想及各误差源引起的干涉信号质量不稳定,以保证测量精度。
4 结 论
本文研究了涡旋光束干涉测量结构与其测量信号处理方法,将被测直线位移转换为干涉图样旋转角度测量。其中,螺旋相位板拓扑荷数决定干涉花瓣图样在圆周空间上的细分倍数,有效降低了传统干涉周期信号高倍细分有效性的压力。结合干涉图案特点,将使用PIN光电探测器的花瓣周期电压信号计数和高分辨力图像细分处理相结合,使实时高精度干涉信号处理方法切实可行。然后构建测量实验系统,并在普通实验室条件下进行与皮米位移台的比对测试,结果表明涡旋光干涉结构的测量分辨力优于0.5 nm,是一种纳米、亚纳米位移实时测量的有效手段。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
九江学院学报(自然科学版)(2022年2期)2022-07-02
红外技术(2022年4期)2022-04-25
机械制造(2020年8期)2020-09-30
计测技术(2020年6期)2020-06-09
航天电子对抗(2019年4期)2019-06-02
中国医学装备(2019年1期)2019-02-14
中央民族大学学报(自然科学版)(2018年1期)2018-06-27
制导与引信(2017年3期)2017-11-02
医疗卫生装备(2015年9期)2015-12-27