基于RobotStudio的颜色分拣工作站仿真设计
2021-02-05 08:47周鑫
山西电子技术 2021年1期
周 鑫
(大连交通大学 机械工程学院,辽宁 大连 116028)
0 前言
工业机器人的应用可以提高工业生产自动化水平,突破技术和成本限制[1]。随着工业水平的不断提高,人们对搬运速度的要求越来越高,传统的人工码垛只能应用在物料轻便、尺寸和形状变化大、吞吐量小的场合,这已经远远不能满足工业的需求,使用工业机器人来进行分类码垛可以代替人们在恶劣环境中工作,能极大的提高劳动生产率,保证产品质量[2]。
在实际机器人工作站安装前,使用仿真软件RobotStudio对真实的工作站进行离线编程,在软件中对分颜色码垛机器人工作站的各项功能进行调试[3]。本文以物料颜色分类码垛为研究对象,解决物料箱分类码垛问题,使用RobotStudio建立颜色分类码垛机器人的仿真系统模型。
1 颜色分拣工作站模型搭建
RobotStudio有强大的离线编程功能,能帮助使用者在实际构建机器人系统之前先进行设计和试运行。RobotStudio自带建模功能不是很强大,复杂模型难以完成造型,可以使用Solildworks等三维软件建模完成后保存为step、igs、sat等格式导入RobotStudio再进行模型的工作空间调整,本工作站机器人吸盘使用Soildworks完成造型再导入RobotStudio后安装在机械手上完成抓取功能[4]。图1为机器人颜色分拣工作站模型及整体布局。
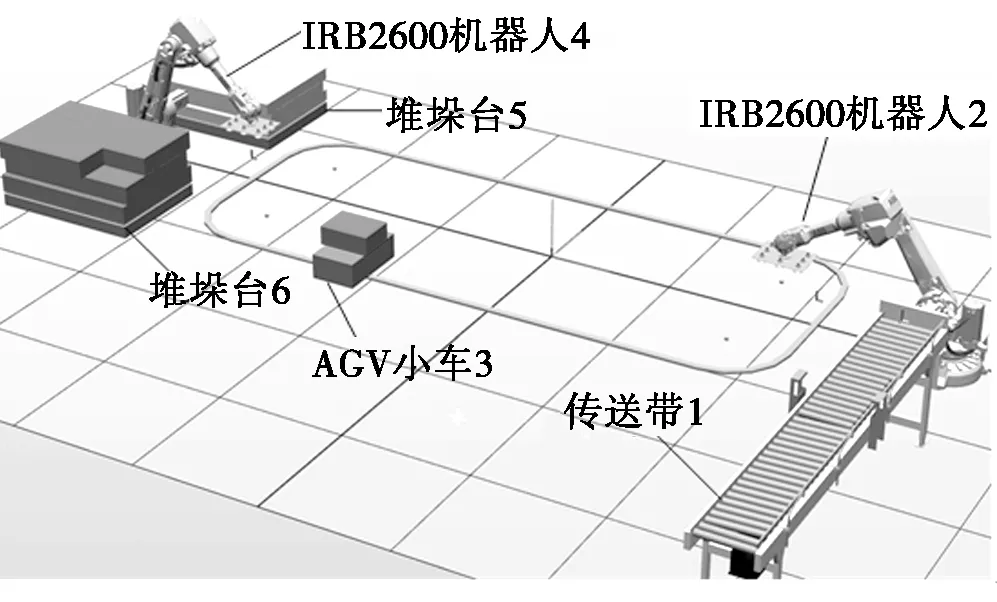
图1 机器人颜色分拣工作站模型及整体布局
ABB公司生产的IRB2600型号工业机器人载荷能力强、工作范围大,在同等重量级机型中率先采用中空臂技术,所有管线均内嵌于上臂和手腕,增强了离线编程的便利性及可靠性。所以选用ABB公司的IRB2600工业机器人作为颜色分拣工作站的机器人部分[5]。
2 仿真系统设计
2.1 系统工作流程
仿真工作站工作流程如下,仿真信号下达之后首先红绿物块由传送带1传送至机器人2,放置到AGV小车3,运送至机器人4,经传感器识别物块颜色,将绿色物块放置在堆垛台5,将红色物块放置在堆垛台6。图2为工作站仿真过程流程图。

图2 工作站仿真流程图
2.2 工作站动态Smart组件设计
在RobotStudio中创建颜色分拣工作站的过程中,AGV小车、传送带、机器人吸盘等装置的动态效果对整个工作站的工作过程相当重要,RobotStudio中Smart组件能实现动画效果的功能,同时也能模拟现场设备的I/O接口与控制逻辑。如图3所示,以传送带Smart组件为例,子组件包括动作子组件Source、本体子组件LinearMover、逻辑信号子组件LogicSRLatch和LogicGate等。将各个子组件通过不同属性连接,信号将在不同子组件之间传递。最后创建传送带的I/O信号,当外部给出动作信号,传送带开始按照Smart组件设定好的逻辑开始工作。
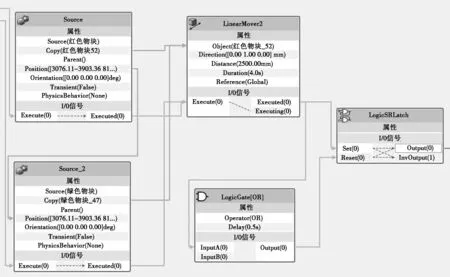
图3 传送带Smart组件设计
2.3 颜色分拣工作站I/O信号的创建
在真实的工作现场,采用PLC控制工作站系统运行,采用现场总线的方式,将PLC与机器人等设备I/O板进行连接,接收传送带机构、工业机器人、吸盘吸取、吸盘松开等现场指令信号。在RobotStudio中使用Smart组件模拟PLC,对颜色分拣码垛工作站进行离线编程。表1为工作站部分I/O信号。
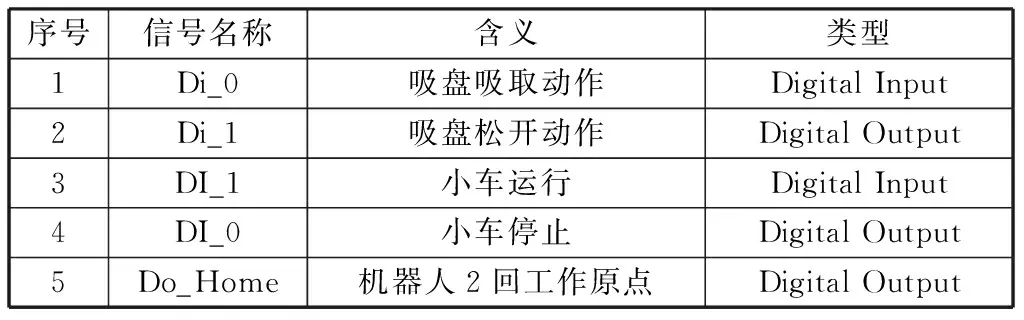
表1 工作站部分I/O信号
3 系统编程与仿真调试
3.1 机器人工具坐标设定
工具坐标系是安装在机器人末端吸盘上的坐标系,原点及方向都是随着末端位置与角度不断变化的,该坐标系实际是通过旋转和位移基础坐标系得来的,通过定义工具坐标系来描述吸盘的实时姿态和TCP位置,如图4所示,本仿真通过四点法确定吸盘工具坐标系,可以更为方便地调整工具姿态,在控制坐标原点不变的操作原则下,使插件运算更为精确。
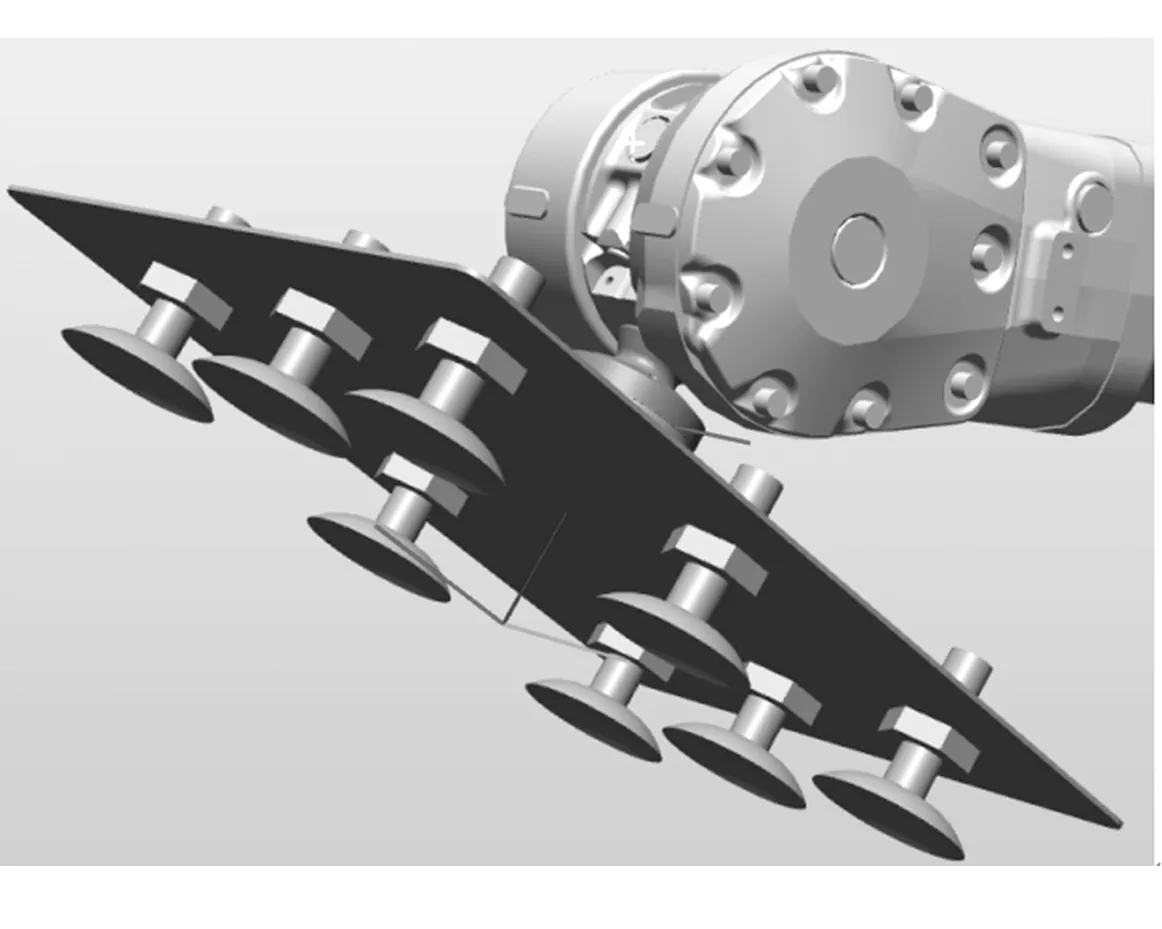
图4 机器人吸盘结构图
3.2 机器人分层堆垛路径规划
在机器人工具坐标系设置好后,需要对机器人吸盘轨迹进行规划。在本仿真中设置物块大小为300×400×150mm,摆放方式为单位码垛台第一层9个,第二层8个,第三层9个,共26个,两个码垛台总共52个物块,采取交错码垛的方式摆放。添加完机器人系统后需要创建5个目标点,小车位置一个,每个工作台各两个,都是蓝点位置,因为横竖放置方式不同所以坐标方向不同,创建的第一个点在小车运过去以后的小车上平面中心点,小车平面中心点可以通过选择导轨的中点,x轴方向偏移-25 mm,z轴方向偏移小车高度+200 mm获得。
3.3 机器人程序编制
Visual Controller技术是RobotStudio离线编程能够准确精准的关键点。依据机器人路径和运动轨迹规划的工作站流程,完成对I/O信号的配置,目标点的示教操作,创建程序数据,对机器人控制器相应的程序进行编写,进行RAPID程序的离线开发,保证机器人颜色分拣工作站的仿真与实际运行的同步进行[6]。
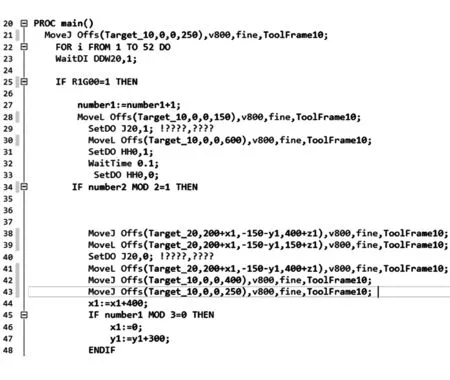
图5 机器人工作站部分主程序
4 结语
本文基于ABB工业机器人平台以及Soildworks三维建模软件,对机器人颜色分类交错码垛工作站进行了仿真研究,随着工业水平的不断提高,码垛机器人工作站作为重要的生产设备,将应用到工业生产的各个角落。
传统使用人力搬运物料分类码垛浪费大量人力、物力,而且效率低下,越来越不符合时代发展需求,因此使用机器人工作站来代替人力实现自动化搬运物料的趋势越来越明显。机器人作为一个新兴行业,还需要投入更多精力、财力深入研究。故本文对颜色分类交错码垛机器人工作站进行了仿真研究,通过对物料摆放位置进行示教,编写机器人Rapid程序,实现红绿物料的自动分类多层交错码垛,提高了工作站效率,离线编程缩短了机器人工作站的调试周期,释放了更多劳动力。
猜你喜欢
橡塑技术与装备(2022年11期)2022-11-08
现代制造技术与装备(2022年1期)2022-02-21
中学生数理化·高一版(2021年1期)2021-03-19
——“模型类”相关试题选登
教学考试(高考物理)(2020年4期)2020-11-16
中学生数理化(高中版.高考理化)(2020年5期)2020-05-22
电子制作(2019年20期)2019-12-04
中学教学参考·理科版(2016年11期)2017-06-08
中学生数理化·高三版(2016年3期)2016-12-24
科技传播(2011年4期)2011-04-13
物理教学探讨(2009年10期)2009-07-23