磨机换衬板机械臂静力学与模态分析
2021-03-25 07:12徐莉萍孙富强
矿山机械 2021年3期
闫 杰,徐莉萍,孙富强,楚 旭,张 良,黄 磊
1河南科技大学机电工程学院 河南洛阳 471003
2洛阳中重自动化工程有限责任公司 河南洛阳 471039
选 矿生产中矿石等物料都需要利用磨机粉碎后再进行加工和运输,因此磨机成为矿业生产中非常重要的机械设备。磨机工作时,其衬板不仅对磨机的筒体有保护作用,而且有提升物料的作用,促进了物料的粉碎,是磨机的主要易耗件,需要不定期更换[1]。衬板的更换以往都是由人工操作,不仅效率低,而且存在较大的安全隐患。目前,利用机器人技术更换磨机衬板已成为行业的研究热点,国内外均已开始研发磨机换衬板机械臂。衬板体积大、质量重,对换衬板机械臂的结构强度和稳定性提出了更高的要求,而相关的研究仍有不足[2-4],需要对换衬板机械臂继续进行深入研究,以满足实际工作要求。
笔者根据磨机实际更换衬板的流程和要求,设计了一种换衬板机械臂,通过对换衬板机械臂的建模以及有限元分析,得到其应力及变形云图、固有频率以及振型,可为研究换衬板机械臂的其他动力响应和结构优化提供依据。
1 换衬板机械臂结构设计
利用换衬板机械臂更换衬板的工作流程为:磨机停机,将换衬板机械臂小车停放在磨机入口前并锚固,以增强机械臂工作时的稳定性;利用移动工作台将机械臂送入磨机内部,调整机械臂的位姿,抓取已拆除螺栓的旧衬板并送出磨机;抓取新衬板进入磨机内,调整到合适位置;将新衬板上的螺栓孔与磨机上的螺栓孔对齐,用螺栓紧固。
根据更换衬板的实际工况,确定换衬板机械臂具有 6 个自由度,可以应对更换衬板时的各种状况[5]。机械臂的整体结构如图 1 所示,主要由回转台、俯仰缸、伸缩臂和抓具等组成。
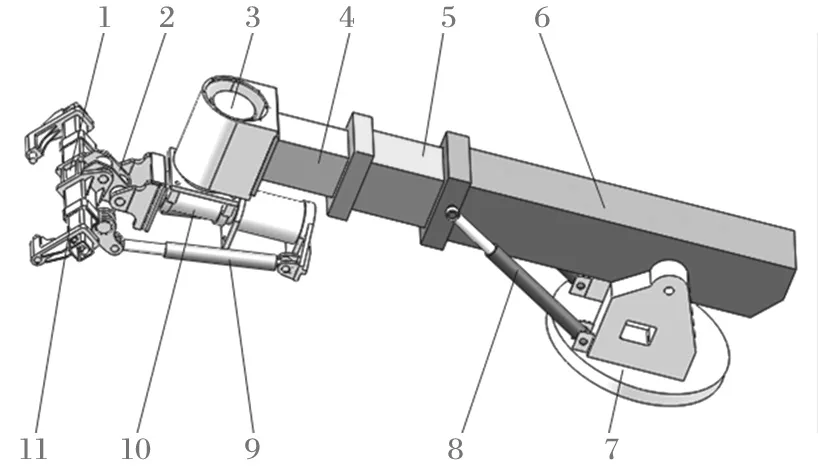
图1 磨机换衬板机械臂的结构Fig.1 Structure of manipulator arm for replacing mill liner
回转台可以使机械臂在水平面内转动;俯仰缸可实现机械臂的上下摆动;由内臂、中臂和外臂组成的三节伸缩臂可实现抓具的伸出和缩回;抓具由抓手、抓具滑梁、摆杆、偏航马达、滚摆马达、小液压缸组成,可实现衬板的抓取和位置的精细调整,其中抓手通过衬板上的吊耳抓取衬板,摆杆是一个连接机构,使抓具滑梁摆动,偏航马达使前端的抓手整体旋转,滚摆马达可以使抓手左右偏转,小液压缸使抓手和滑梁上下摆动,抓具滑梁使抓手抓紧衬板。
2 有限元分析模型的建立
由于抓取的衬板质量高达 1 500 kg,机械臂的最大操作半径为 4.5 m,这对换衬板机械臂的强度和操作稳定性提出了更高的要求,为此,需要对机械臂的静力学和结构动力特性进行深入分析。
根据衬板的实际更换过程,对伸缩臂在全伸长状况下机械臂的 3 种极限工况进行分析:①工况 1,机械臂从地面抓取衬板或安装磨机底部的衬板 (俯角35°);② 工况 2,机械臂安装水平位置的衬板 (水平0°);③工况 3,机械臂安装磨机顶部位置的衬板 (仰角 45°)。这 3 种工况下的机械臂姿态分别如图 2(a)~(c) 所示。

图2 机械臂 3 种工况Fig.2 Three operation modes of manipulator arm
在 SolidWorks 软件中绘制三维模型。由于机械臂尺寸大、零件多,装配复杂,导入 ANSYS 中求解困难,需要对模型进行简化。将螺栓连接的地方改为固定连接,由于零部件上的螺栓孔、倒角、通孔等对性能分析影响较小,可忽略不计。选用 Workbench 对机械臂进行分析,机械臂的材质选择 Q345D,其密度为7.801×10-6kg/mm3,弹性模量为 2.07×1011Pa,泊松比为 0.29。定义机械臂的网格尺寸为 10 mm,网格划分如图 3 所示。

图3 换衬板机械臂的网格划分Fig.3 Mesh division of manipulator arm for replacing mill liner
3 换衬板机械臂的静力学分析
在静力学分析中,将机械臂的回转台设置为固定结构,为全约束状态。工况载荷只考虑机械臂的自重以及负载,实际工作中磨机衬板的单体质量为几百千克甚至几吨,在分析时设置负载为 15 000 N,如图 4所示。

图4 机械臂的边界条件设置模型Fig.4 Boundary condition setting model of manipulator arm
通过有限元软件对换衬板机械臂模型施加约束,设置一定的边界条件,模拟机械臂的实际工况。通过求解器分析得到机械臂在不同工况下的变形及应力分布情况,如图 5 所示。

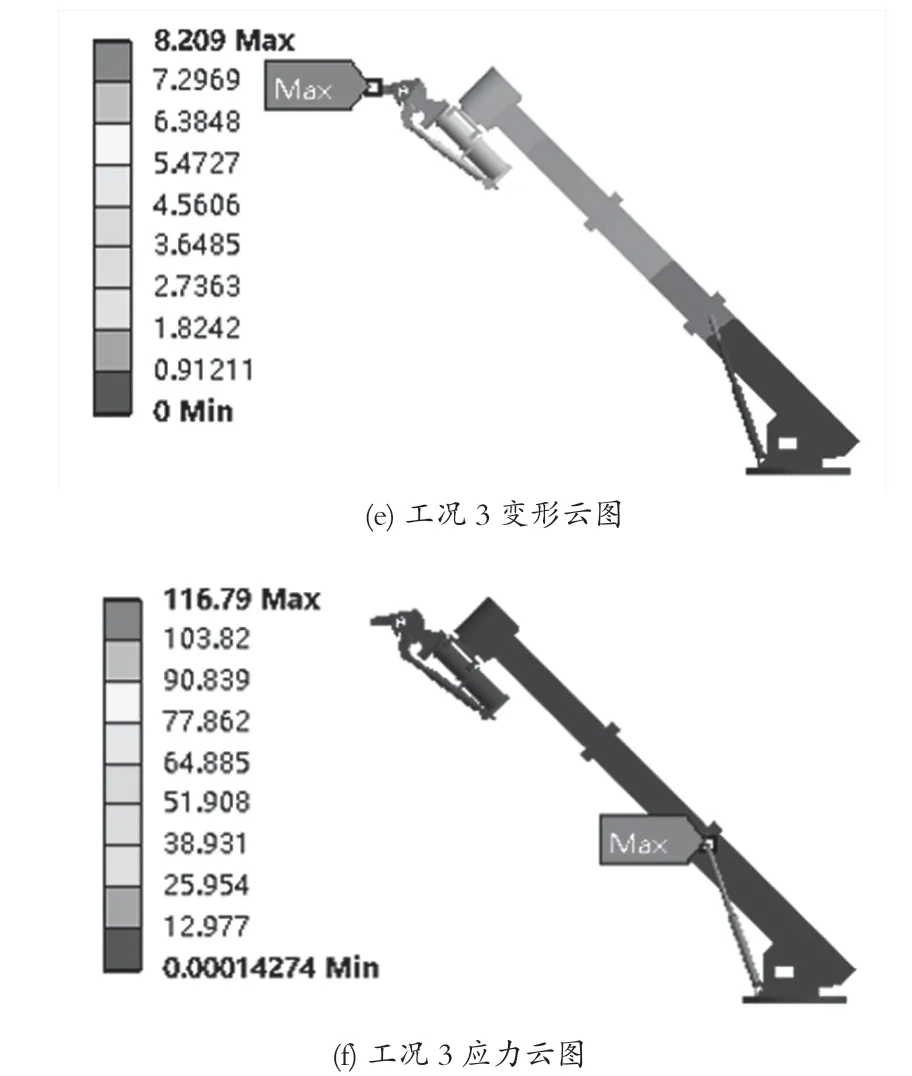
图5 3 种工况机械臂的变形与应力云图Fig.5 Deformation and stress contours of manipulator arm in three operation modes
对各工况的变形云图分析可知,机械臂在下俯时比上仰时的变形量要大,机械臂水平伸长时 (即工况2),其前端抓手处产生了最大 11.15 mm 的变形量。
对模型的整体强度进行分析,机械臂的材料为Q345D,机身采用焊接成型的方法,其极限强度σmax=345 MPa,查表选择安全系数n=1.5,可得 [σ]=σmax/n=230 MPa。
对模型应力云图分析可知,整个模型有少部分的应力集中[6],3 种工况下的最大应力均位于俯仰缸和外臂的连接处,在下俯工况下 (即工况 1),最大应力值为 174.74 MPa,但仍小于碳钢的许用应力值 230 MPa,说明机械臂符合设计要求,机身结构的稳定性能够达到预期要求。在水平和上仰工况下 (即工况 2和工况 3),外臂与底座的连接处也存在一定的应力集中情况,设计时应予以关注。
4 有限元模态分析
模态分析可以求解出机械臂的固有频率,预测模型结构在机械本体振动时的动态特性。通过分析模态的振型云图,可以得出所设计的磨机换衬板机械臂自身结构的薄弱之处,为以后重载机械臂的结构优化提供参考。
在模态分析时,低阶振动频率对机械臂的动态特性影响最大,所以只对机械臂的前 6 阶频率进行分析。在有限元软件中,模态分析的过程和静力学分析基本相似,导入机械臂模型,设置材料特性,划分网格,设置边界条件,利用求解器求解等,得到机械臂前 6 阶振动频率及相应的变形云图,分别如图 6、7所示。
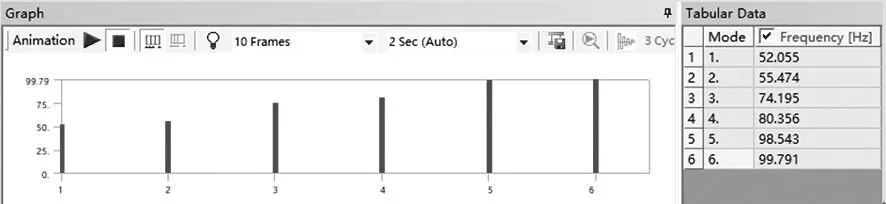
图6 前 6 阶固有频率Fig.6 Natural frequencies of preceding six orders

图7 前 6 阶变形云图Fig.7 Deformation contours of preceding six orders
由图 6、7 可知,在第 1 阶和第 3 阶振型中,变形主要集中在外臂的末端,对机械臂的工作影响不大;在第 2 阶和第 6 阶振型中,变形主要集中在机械臂前端抓手夹持部位;在第 4 阶振型中,变形主要集中在偏航马达外壳处;在第 5 阶振型中,变形主要集中在外臂与底座的连接处。
机械臂的第 2 阶频率较低,主要影响机械臂的夹持位置,在更换衬板时容易受低阶频率振动的影响而引起共振,影响正常工作。分析得知,机械臂容易受到外部振动频率为 70~ 100 Hz 激振源的影响而引发共振,最大变形位于外臂与回转台的铰接处和机械臂前端的抓手处。这两部分都影响实际安装衬板时的精度和效率,应尽量避免在该共振频率下工作。
5 结论
设计了一种更换磨机衬板的机械臂,对该机械臂的结构进行了有限元分析,验证了其强度的可靠性,并得出机械臂的应力和变形云图以及各阶频率和振动变形。在静力学分析中得出机械臂的最大变形量为11.15 mm,位于机械臂前端抓手夹持位置;最大应力为 174.74 MPa,集中在俯仰缸和外臂连接处。在模态分析中得出 70~ 100 Hz 的激振源会使外臂与回转台的铰接处以及前端抓手产生较大变形。所得结论为换衬板机械臂的进一步结构优化提供了依据。
猜你喜欢
矿山机械(2022年8期)2022-09-01
导航定位学报(2022年4期)2022-08-15
矿产与地质(2021年5期)2022-01-20
矿山机械(2021年11期)2021-11-19
防爆电机(2021年3期)2021-07-21
建材发展导向(2021年6期)2021-06-09
矿山机械(2021年5期)2021-05-26
建材发展导向(2020年16期)2020-09-25
矿山机械(2020年4期)2020-04-26
名家名作(2017年3期)2017-09-15