
轨道长波不平顺半测回法测量精度的研究(Ⅱ)
2021-09-09 05:17熊丽娟朱洪涛王志勇吴维军
铁道学报 2021年8期
熊丽娟,朱 嫣,朱洪涛,王志勇,吴维军,魏 晖
(1.南昌航空大学 航空制造工程学院,江西 南昌 330063;2.南昌大学 机电工程学院,江西 南昌 330031;3.南昌航空大学 飞行器工程学院,江西 南昌 330063;4.江西科技学院 智能工程学院,江西 南昌 330098)
我国铁路近年来不断提速,对轨道质量提出了更高的要求。而轨道长波不平顺是高速铁路轨道质量状态的重要评价指标之一,也是影响列车运行安全与乘客舒适性的主要因素之一[1-2]。因此,铁路提速意味着轨道长波不平顺的检测精度需要进一步提高。
本文继《轨道长波不平顺半测回法测量精度的研究(Ⅰ)》一文之后,进一步探讨在半测回法(即在所测线路上只推行轨检仪一遍)[3]中如何测取轨检仪的实时姿态进行地球自转补偿,以克服按设计数据做地球自转补偿的局限和进一步提高半测回法长波测量的精度。
现将上篇文章中相关部分重申如下:
① 轨检仪(图1)上的高低光纤陀螺仪(FOG)测得的地球自转分量为
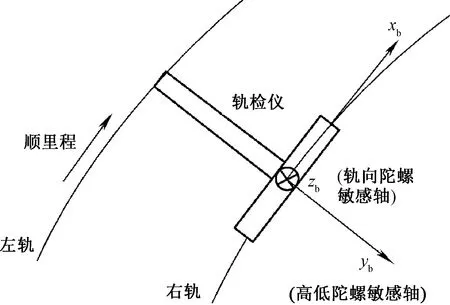
图1 轨检仪示意
Zve=Ω[cosB(sinΘsinφcosA-cosΘsinA)-
sinBsinΘcosφ]
(1)
式中:Ω为地球自转角速度,Ω=7.292 115×10-5rad/s[4];B为轨检仪所处位置的纬度;A为轨检仪所处位置顺里程方向的真方位角;φ为轨道坡度角;Θ为超高倾角。A、φ、Θ即为轨检仪姿态角,见图2。图2中,坐标轴下标n代表当地地理坐标系,即导航坐标系,下标b代表载体坐标系。

图2 轨检仪姿态示意
② 轨检仪轨向FOG测得的地球自转分量为
Zhe=Ω[cosB(sinΘsinA+cosΘsinφcosA)-
sinBcosΘcosφ]
(2)
③ 轨检仪在第i个测点处高低FOG和轨向FOG的地球自转补偿模型可表达为
(3)
式中:ωvi为高低FOG修正值;ωvi_m为高低FOG直接测得值;Zv0_m为高低FOG在轨检仪推行起点处测得的零偏;Zve0为高低FOG在轨检仪推行起点处的地球自转分量,按式(1)计算;Zvei为高低FOG在第i个测点处的地球自转分量,按式(1)计算;下标首字符为h的量代表轨向FOG的相应值,轨向FOG在起点和第i个测点处的地球自转分量按式(2)计算。
1 使用实时姿态角增量解算长波
因为要使用实时姿态角进行地球自转补偿,所以先计算轨检仪姿态角——真方位角、坡度角和超高倾角[3],而相邻测点间的真方位角增量与坡度角增量恰为相邻测点间轨道平面曲线转角与竖曲线转角,这有利于长波数据的精确计算。
在相对测量中,无论短波还是长波,其不平顺都是与轨道平面曲线或竖曲线上的设计弦测值比较所得,因此其长短波的计算都理应基于轨道平面曲线或竖曲线转角而作。但由于铁路上多数轨道平面都近似呈水平状态,故现行的相对测量往往直接将轨向FOG和高低FOG在相邻测点间输出的角速度积分作为轨道平面曲线和竖曲线上的转角进行长短波计算,至多因考虑“高低与轨向之间相互影响”再做一次修正。这种近似对短波数据影响不大,但对长波影响较为明显。因为在10~20 m的线路范围内,FOG敏感轴的方向确实没有多大变化,但在70 m甚至120 m范围内,情况就相当不一样了。而且,短波精确与否的比照值常常是手工拉弦测量值,并非轨道水平面投影曲线的弦测值,这就使短波测量上的误差更不易被发现。相比之下,长波难以进行手工拉弦测量比对,且一旦出错便会与设计值相去甚远,这才使得其测量问题更易被发现。
轨检仪推行过程中,其轨向和高低两个FOG的敏感轴方向实际一直在变化。将不同方向的角速度积分叠加,所得量虽具有角度量纲,但一般情况下并无明确物理意义[5]。
如图3所示,当轨检仪在圆曲线上匀速推行时,其轨道面是一个圆锥面;如果这一段线路上坡度为零,该轨道中线即在水平面上,其竖曲线将是水平线,左右轨高低值均应为零。此时,只有高低FOG测出的角速度为零,现行的相对测量才会得出高低为零的正确结果;但很明显,高低FOG输出的角速度不会为零,而是ω高低。如此,现行相对测量方法所测得的每小段竖曲线转角将为一非零恒定值,其描绘的竖曲线将是一条圆曲线,而根据该转角所求得的长波高低值更加不会是零。这一切显然与实际相差甚远。

图3 轨检仪圆曲线上匀速推行示意
由上述分析可知,欲获得精确的长波测量值,必须使用姿态角增量求解,即用真方位角增量求长波轨向、坡度角增量求长波高低,而不能仅使用轨向、高低FOG的直接积分值近似。这样看来,若能测取轨检仪的实时姿态角,则不仅可用于补偿地球自转,其增量还能进行更准确的“以小推大”长波计算,可谓一举两得。
2 轨检仪姿态角的测算方法
通常姿态角的求解至少需要测量载体三个维度上的角速度,比如图1中轨检仪在xb、yb、zb三个方向上的角速度。但本文的硬件试验基础,即江西日月明GJY-T-EBJ-3型轨检仪仅在yb和zb两方向配有FOG,在xb向并无FOG测量角速度。但该轨检仪姿态角中的超高倾角系由其倾角传感器直接测得。因此,由两个FOG加上已知的超高倾角求解真方位角和坡度角是有可能的。
2.1 求解xb向角速度积分μx
GJY-T-EBJ-3型轨检仪做相对测量时,相邻测点间距为0.125 m。对于铁路长波测量而言,这一采样间距已经足够小,使得每0.125 m上的轨检仪角速度可视作常数。相邻测点间yb和zb方向的角速度积分系由高低陀螺积分小板和轨向陀螺积分小板直接输出,分别将其记为μy和μz,即
μy=ωvΔtμz=ωhΔt
(4)

2.1.1 对地角速度积分与欧拉角间关系
假设轨检仪从位置b0到b1走了0.125 m,偏航角为α1、俯仰角为β1、横滚角为γ1,那么固结在轨检仪上的载体坐标系从b1状态到b0状态的坐标变换矩阵为
(5)
因为从b0到b1是非常小角度的转动,所以将式(5)中的sinα1近似为α1、sinβ1近似为β1、sinγ1近似为γ1,而cosα1、cosβ1、cosγ1近似为1,再兼之忽略微小量之间的乘积,则式(5)简化为
(6)
此欧拉角[α1β1γ1]T不是0.125 m上的角速度积分μ,但已知μ可求解该欧拉角。
(7)
式中:E随时间t变化,可写作E(t),而[ωRωvωh]T在0.125 m路程对应时间Δt内可视为常数。假设轨检仪在b0位置时为时间零点,则当t∈[0, Δt]时,式(7)可写作常微分方程的一般形式

(8)
式中:函数f(E(t))即为式(7)第二个等号右边部分。该微分方程的初始条件显然是E(0)=[0 0 0]T,将其简写作E0。
采用四阶Runge-Kutta经典格式[6]求解式(8),得
(9)
式中:E(Δt)为[α1β1γ1]T。
2.1.2 欧拉角与姿态角增量的关系
(10)


(11)
2.1.3 导出μx的计算公式
由上文可知,从轨检仪上的高低FOG、轨向FOG和倾角传感器可以测得μy、μz和γ1(即超高倾角增量ΔΘ),那么根据式(9)中的第三行可解得
(12)
2.2 姿态角的一、二、三、四子样旋转矢量算法
2.2.1 姿态角计算方法概述
式(11)已经给出一种姿态角计算方法,其隶属于姿态角的四阶Runge-Kutta算法,但因在公式推导过程中做了一些近似简化,所以与准确的四阶Runge-Kutta算法(以下简称RK4算法)相比,精度有所不如。
对于已知每0.125 m区间的角速度积分求解姿态角这一命题,使用旋转矢量法要比使用RK4算法更为合宜。轨检仪姿态角的具体解算方法见图4,主要使用了四子样旋转矢量优化算法(简写作RV4),个别地方还使用了单子样(简写作RV1)、双子样(简写作RV2)和三子样旋转矢量优化算法(简写作RV3)。前3个测点由于不具备四个子样,无法使用RV4算法,故分别使用RV1、RV2和RV3算法;第4个测点之后则全部使用RV4算法迭代求解。虽然此处RV1、RV2、RV3算法的更新间隔较RV4算法短,但计算精度并没有0.5 m更新一次的RV4算法精度高[7]。

图4 各测点姿态角算法示意
目前,多子样旋转矢量姿态算法方面的文献有很多,除了四子样经典优化算法,还有五子样[8]、六子样[9]甚至八子样优化算法[10]。但通过试验比较发现,五子样、六子样的优化算法在长波测量中的使用效果并不比经典RV4算法更好[11],故此处依然主要使用RV4算法。
2.2.2 一、二、三、四子样旋转矢量算法

将第 (i-1) 个测点到第i个测点的角速度积分用μi(i=1, 2, 3, …)表示,第 (i-4) 个测点到第i个测点的四子样旋转矢量用ψi(i=4, 5, 6, …)表示,则其计算公式如下:
(13)
第0到1个测点的单子样旋转矢量ψ1不需要另外计算,即为角速度积分值μ1。
第0到第2个测点的二子样旋转矢量用ψ2表示,其计算公式为
ψ2=μ1+μ2+2·(μ1×μ2)/3
(14)
第0到第3个测点的三子样旋转矢量用ψ3表示,其计算公式为
ψ3=μ1+μ2+μ3+9·(μ1×μ3)/20+
27·[μ2×(μ3-μ1)]/40
(15)


(16)

(17)

(18)

(19)

(20)
(21)
(22)

2.3 实时姿态解算与地球自转补偿的融合
实时姿态角的解算既是为获得姿态角增量计算长波,也是为了根据实际姿态补偿地球自转,提高长波测量精度;也唯有正确补偿了地球自转,所求得的姿态角才会准确。因此,实时姿态解算与地球自转补偿之间需要融合起来,相互为用。
图5是实现两者融合算法的主要流程。图中六边形框内是车载全站仪、上、下位机之间传输的数据,最左列方框内进程全在下位机中实现,起点姿态角与纬度由免置平车载全站仪测得[13-14],其余方框内进程在上位机中实现。加黑三角标记的方框提示所得数据为重要数据,测量过程中需保存。
完成图5所示流程后,轨检仪推过线路上各测点的姿态角就已知了,相邻测点间的姿态角增量由前后姿态角直接相减得到。

图5 实时姿态解算与地球自转补偿流程图
3 试验结果
文献[3]的试验是基于“高速铁路线路实际线形一般与设计线形不会有太大出入”的假设,根据设计数据进行地球自转补偿,本文则根据实测轨检仪姿态角和纬度进行地球自转补偿,并更理性地使用姿态角增量进行长波计算。现将前一方法称作基于设计姿态补偿的半测回法 (简称设补半测回法),将后者称为基于实时姿态补偿的半测回法 (简称实补半测回法)。
3.1 状况不良线路试验结果
理论上,当实际线路与设计线形偏差较大时,设补半测回法对长波的测量精度较低,而实补半测回法精度则不受实际线路偏差大小的影响。现将这两者以及原半测回法(即不补偿地球自转的半测回法)共同应用于一条状况不良的普速线路——该试验线路包含一完整的单曲线,曲线半径800 m,曲线总长148 m,右转7°1′ 7.44″,缓和曲线长50 m,超高75 mm,直缓点在0.025 km处。此线路的70 m长波设计值和按设计资料预测的长波顺逆差见图6。用原半测回法、设补半测回法和实补半测回法测得的长波顺逆差见图7。

图6 状况不良线路长波设计值与原半测回法顺逆差预测值
图7试验结果系使用日月明公司的275号轨检仪测量所得,该轨检仪上FOG零漂指标为不大于0.3(°)/h (1σ),其起点零漂测量程序使用的有效位数相对较少。对比图7(a)与图6(b),发现虽然原半测回法的实测顺逆差和预测顺逆差趋势基本相似,但数值上还是颇有差异。如果测量无误,则说明铁路实际线形偏离设计值较远。
正如文献[3]中所分析的那样,当半测回法的顺逆差较大时,也就意味着其测量误差较大。因此对比图7中原半测回法、设补、实补半测回法的长波顺逆差,可以间接比较三种半测回法的长波测量精度。很明显,实补半测回法的长波顺逆差是三者中最小的,其高低差基本已在零线附近波动,而轨向差还是比较偏离零线,这很可能是FOG起点零偏测量精度偏低所致。

图7 状况不良线路三种半测回法之长波实测顺逆差(275号)
改用8209号轨检仪(其配置有零漂指标不大于 0.1(°)/h (1σ)的无骨FOG,且起点零偏测量中的有效位数增加)再在此普速线路上进行试验,试验结果见图8。这次发现,8209号机原半测回法的长波顺逆差与图6的预测顺逆差吻合度较高。比较图7和图8中的试验结果可知,275号机使用原半测回法时所产生的较大顺逆差应是源于起点零偏和FOG测量精度均偏低的缘故。在这两方面精度都有所提高的8209号机所测得的实补半测回法长波顺逆差,如图8(b)所示,其绝对值不超过1.25 mm、峰峰值不超过1.98 mm,比其原半测回法的顺逆差(绝对值达3.71 mm)小了近2/3。可见实补半测回法的长波精度确实较先前提升很多。

图8 状况不良线路原半测回法和实补半测回法长波顺逆差比较(8209号)
接下来使用8209号轨检仪在此普速线路上用基于实时姿态的一测回法(即使用姿态角增量解算长波的一测回法)进行了多次试验。由于一测回法基本消除了起点零偏测量误差以及各测点的地球自转零偏误差,故取其70 m长波均值(见图9)作为检验半测回法测量精度的相对真值。

图9 状况不良线路上基于实时姿态的一测回法70 m长波均值(8209号)
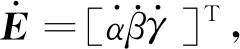
8209号轨检仪使用原半测回法和实补半测回法所测得的长波误差见图10。由图10(a)可知,原半测回法的高低误差高达近40 mm,如此巨大的误差主要应是缘于原半测回法使用了FOG直接积分值而非姿态角增量进行长波计算。正如第1章中分析的那样,将FOG直接积分近似为平面曲线或竖曲线转角有可能在长波测量上引起明显的粗大误差。图10(b)则表明,实补半测回法的长波测量误差是非常小的,无论顺里程还是逆里程推行,其最大误差都未超过1.11 mm,实现了比现有70 m长波Ⅰ级精度要求(允许误差3 mm)更高的水准。
图10 状况不良线路原半测回法和实补半测回法长波误差比较(8209号)
3.2 状况良好线路试验结果
文献[3]给出了昆玉客运专线正线的JD2曲线段上原半测回法和设补半测回法的试验结果。该线路属新建成的有砟高速铁路线路,与设计线形偏差较小,因此继续使用实补半测回法在其上试验,考察此方法在线形偏差较小线路上是否能比设补半测回法的精度高。
重申昆玉线试验段曲线资料如下:曲线半径4 504.548 m,曲线总长733.446 m,右转7°2′ 22.5″,缓和曲线长180 m,超高45 mm,直缓点在42.904 727 km处。此次试验所使用的依然是文献[3]试验用机(5168号轨检仪),其高低FOG零漂指标为不大于0.5(°)/h (1σ),轨向FOG零漂指标为不大于0.2(°)/h (1σ),下位机起点零偏测量的有效位数较少。
该线路上实补半测回法的长波顺逆差见图11,其发展趋势与设补半测回法的基本一样,整体偏离零线的值也基本一样,但其高低差的振荡幅值有所降低。仔细分析实补法和设补法的顺逆差数据,发现实补法的高低顺逆差绝对值和峰峰值相对设补法均有所降低,但其轨向顺逆差只是峰峰值降低,绝对值却稍有增加。究其原因,可能是轨检仪起点零偏测量精度不够,而每次测量时误差又有所不同所致。
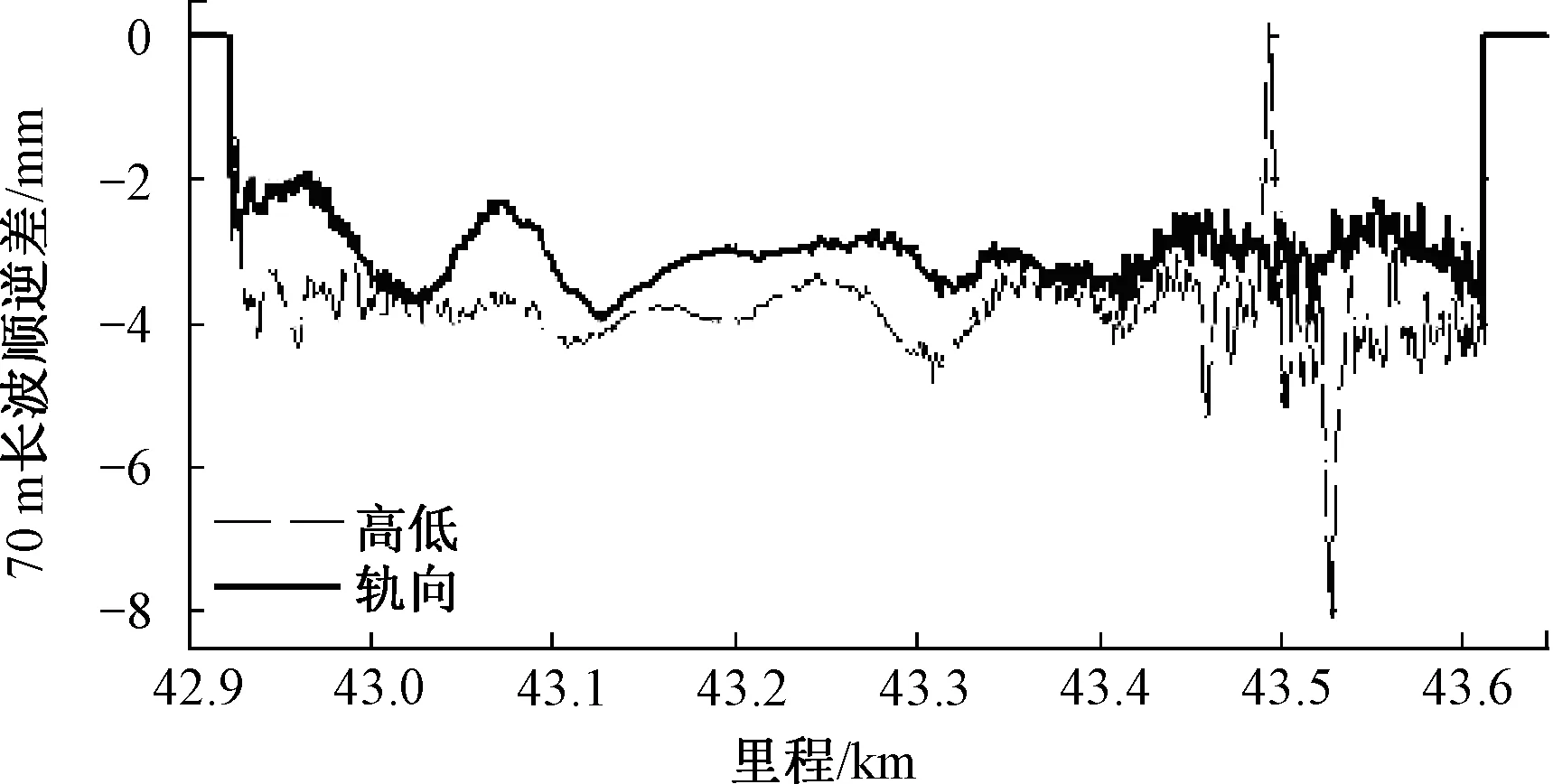
图11 昆玉线实补半测回法长波顺逆差(5168号)
昆玉线上使用基于实时姿态的一测回法所测得的70 m长波均值见图12,以此作为相对真值检验原半测回法和设补、实补半测回法的精度。

图12 昆玉线上基于实时姿态的一测回法70 m长波均值(5168号)
昆玉线上原半测回法和设补、实补半测回法所测得的长波误差见图13。图13很好地表明,从原半测回法到设补法、再到实补法,其长波测量精度是逐步提升的。在此状况良好线路上,原半测回法误差显然比状况不良线路上的小了很多;当然,该误差也有部分来自直接使用角速度积分求解长波,因此其大小与线路曲线半径和超高亦有关。由图13(c)可知,虽然所使用的5168号轨检仪其高低FOG精度偏低、稳定性不好,但如忽略长波高低在43.5 km附近的粗大误差,实补法的顺推或逆推长波误差均基本维持在2 mm左右。而这2 mm的误差,极大部分还是由起点零偏测量不准问题所引起。

图13 昆玉线三种半测回法的长波误差(5168号)
综上所述,实补半测回法在补偿地球自转和长波精确计算上的效果比设补半测回法更好,尤其在偏差较大的线路上。
4 结论
本文研究了在半测回法中如何测取轨检仪实时姿态进行地球自转补偿的问题,并提出应使用姿态角增量进行长波精确求解。
(1)阐明了现有相对测量中使用FOG角速度积分“以小推大”求解长短波可能带来的问题,指出应当使用方位角增量和坡度角增量求解长短波的轨向和高低。
(2)建立了在仅有高低和轨向FOG以及倾角传感器条件下测算横滚角速度积分进而求解姿态角的数学模型。
(3)提出了求解轨检仪实时姿态角的一、二、三、四子样旋转矢量优化算法。
(4)将轨检仪实时姿态解算与FOG地球自转实时补偿有效融合,编写了基于实时姿态补偿的半测回法的软硬件程序。
(5)分析三种半测回法——原半测回法、设补与实补半测回法在不同状况线路上的试验结果,证明实补半测回法的长波精度比前两种方法高,比设补半测回法更能保证长波测量误差在Ⅰ级精度允许范围(3 mm)之内,尤其是在线路线形偏差较大时。
(6)实补半测回法测量长波时,如要保证其Ⅰ级精度,需要使用零漂指标不大于0.3(°)/h (1σ)的FOG、示值误差在0.1°以内的倾角传感器和确保FOG起点零偏测量过程中的有效位数。
猜你喜欢
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
中国外汇(2019年20期)2019-11-25
导航与控制(2019年2期)2019-06-12
中学课程辅导·教师通讯(2018年10期)2018-09-04
数字技术与应用(2017年8期)2017-10-30
中学生数理化·高一版(2017年3期)2017-07-08
红旗文稿(2016年7期)2016-05-13
党的生活·党员电教与远程教育(2008年2期)2008-04-29
