
智能车辆换道路径跟踪协同控制研究
2022-02-23 10:26陈林彬谭鹏宇
中国测试 2022年1期
陈林彬,唐 岚,谭鹏宇
(西华大学汽车与交通学院,四川 成都 610039)
0 引 言
随着智能车辆在智能交通系统中的不断发展,车辆运动控制也得到了很大探索。换道作为智能车辆自主驾驶技术的重要运动模式之一,已成为研究的热点和难点[1]。然而,智能车辆由于强非线性特性和路面工况的外部干扰,使得智能车辆在换道过程中的稳定性和路径控制都面临着挑战。
目前针对智能车辆进行路径跟踪时车辆行驶的稳定性,许多路径跟踪控制策略被提了出来。文献[2]提出了一种基于自适应滑模控制的预览控制算法,以保证轨迹跟踪精度;文献[3]采用模型预测路径跟踪控制器和稳定性控制器相结合的解耦控制策略,稳定性控制器由预览G矢量控制和直接横摆力矩控制组成,以确保车辆的横向稳定性;考虑到车辆的侧倾稳定性,文献[4]采用模型预测控制进行横摆稳定控制,模糊PID控制用于轮胎制动力控制,并将二者结合起来保证轨迹跟踪的稳定性;文献[5]考虑车辆纵向和横向动力学的控制策略可以有效地提高车辆的路径跟踪精度和行驶稳定性;文献[6]构建防侧翻约束条件,并基于模型预测控制算法设计出避障路径跟踪控制器;为了使车辆在高速公路上完成关键车道的改变,文献[7]开发了一种综合的纵向和横向制导算法。文献[8]中根据车辆期望横向加速度和期望横向位移的变化特性,采用5次多项式法规划符合驾驶人换道避撞特性的避撞路径;文献[9]将纯几何跟踪控制器和基于强化学习的PID控制器相结合,保证了车辆的跟踪性能和安全性;目前针对路径跟踪大多仅考虑横向运动,较少考虑纵向动力学。
本文针对SBW系统车辆同时考虑横向运与纵向运动,提出了一种分层协同控制策略。在上层控制器中,根据期望的横摆角,提出了一种基于指数收敛的滑模路径跟踪控制律,同时基于横向位移与纵向制动的协同误差模型,设计了车轮滑移率的滑模跟踪控制律。在下层控制器中,针对线控转向系统提出了径向基(RBF)神经网络自适应滑模控制器,以保证前轮角跟踪的精度。
1 换道参考轨迹及路径跟踪控制设计
1.1 换道参考轨迹
本文利用梯形侧向加速度曲线[10]设计了车辆在弯道换道的参考轨迹,如图1所示。

图1 梯形侧向加速度曲线图
根据图1中梯形加速度曲线的变化规律,智能车辆的横向加速度可定义为:

式中:y¨d(t)——车辆侧向运动加速度;
Jmax——侧向加速度变化率的最大值;
u(t)——单位阶跃函数;
t1,t2——侧向加速度达到和结束最大值时所在的时刻;
t3,t4——侧向加速度达到和结束最小值时所在的时刻;
t5——车道变换结束时刻。
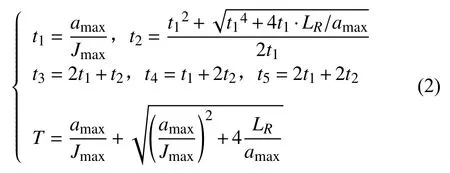
关键时刻受以下约束:
当车辆从起始车道的中心线变为目标车道的中心线时,场景如图2所示。当车辆换道时,时间t处的瞬时半径为R−yd,可得在换道过程中围绕车辆中心OR的旋转角 α的变化率为vx/(R−yd)。因此车辆绕中心的旋转角 α可以通过积分运算为:
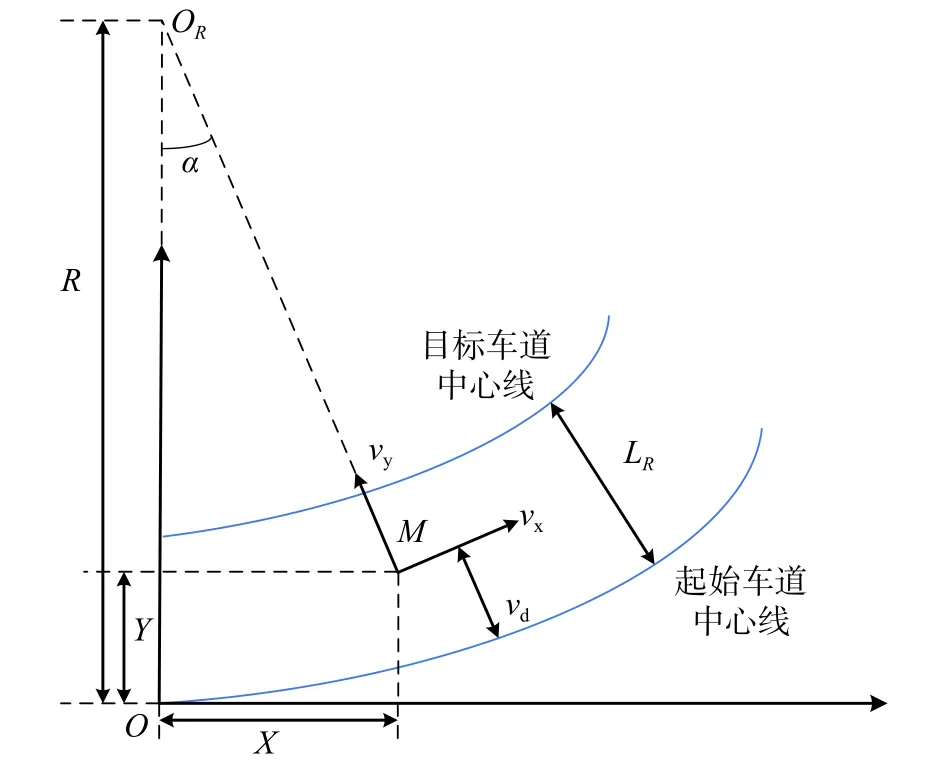
图2 弯道车辆车道变换示意图

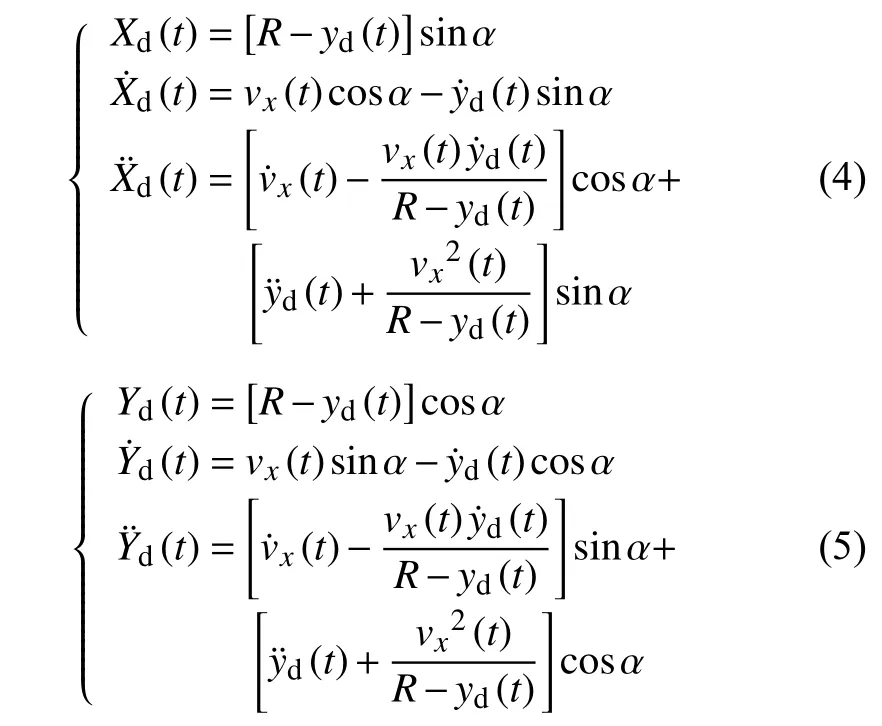
如前所述,则可以计算出车辆沿x轴和y轴的运动状态。车辆沿x轴与y轴的期望位移、速度和加速度如下:
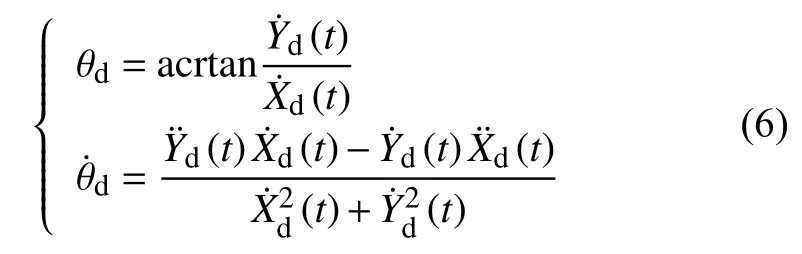
根据参考位移和速度,确定参考偏航角和偏航角速度为:
1.2 路径跟踪控制设计
1.2.1 车辆模型
在XOY惯性坐标系下,建立了能够反映车辆横向动力学和横摆运动的二自由度车辆模型,作为路径跟踪控制器设计的基础。该图如图3所示,其中θ为横摆角,ωθ为横摆角速率,β为侧滑角。
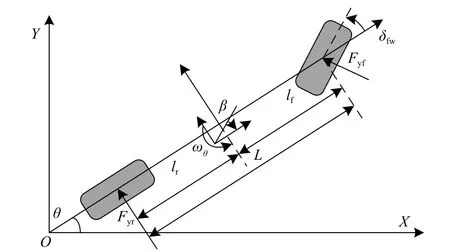
图3 二自由度模型



1.2.2 路径跟踪控制律设计

1.2.3 协同控制

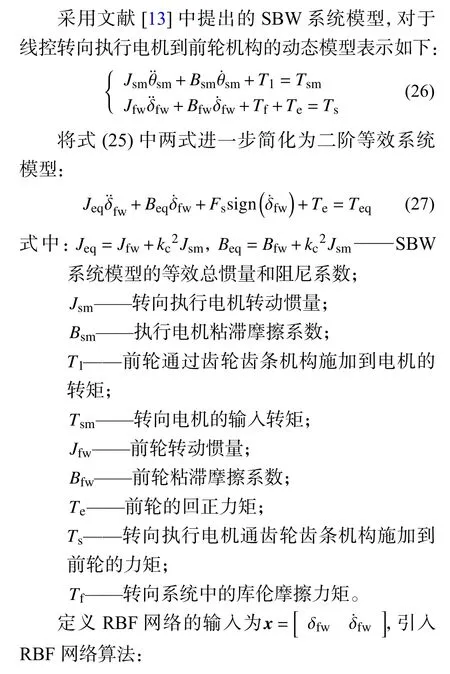
2 前轮转角跟踪控制
SBW系统转向执行机构如图4所示。当转向执行器接收到来自上控制器的前轮转角输入指令时,通过转向执行器经控制输出适当的角度信号,保证前轮转角跟踪的稳定性和准确性。
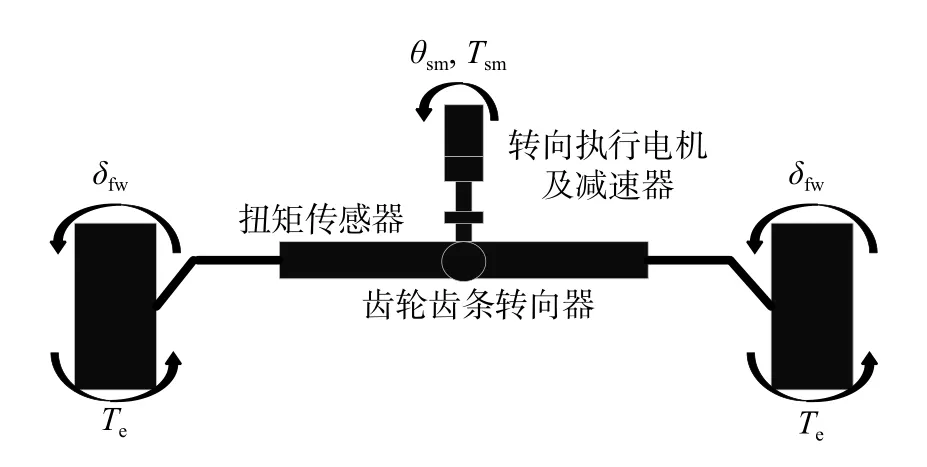
图4 SBW系统执行机构

3 仿真分析
为验证控制器控制性能,采用Matlab/Simulink和Carsim平台进行仿真验证,图5为仿真控制原理框图,其中所涉及的仿真参数如表1所示。
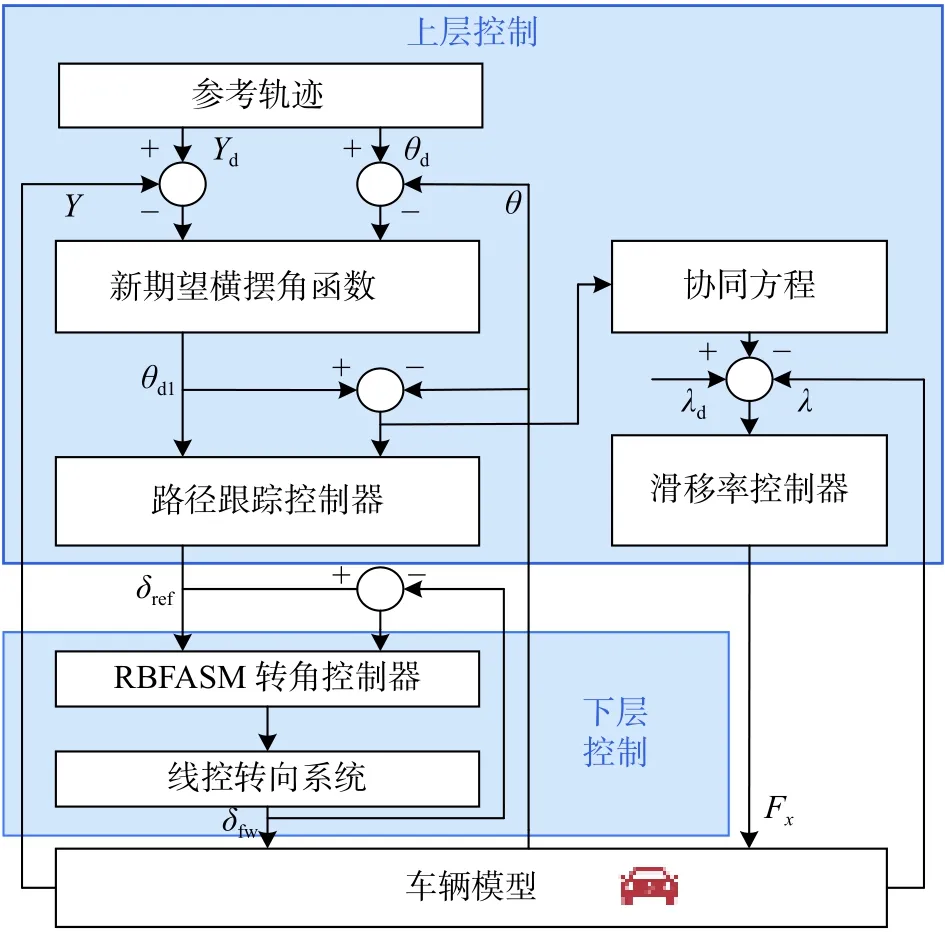
图5 控制结构框图
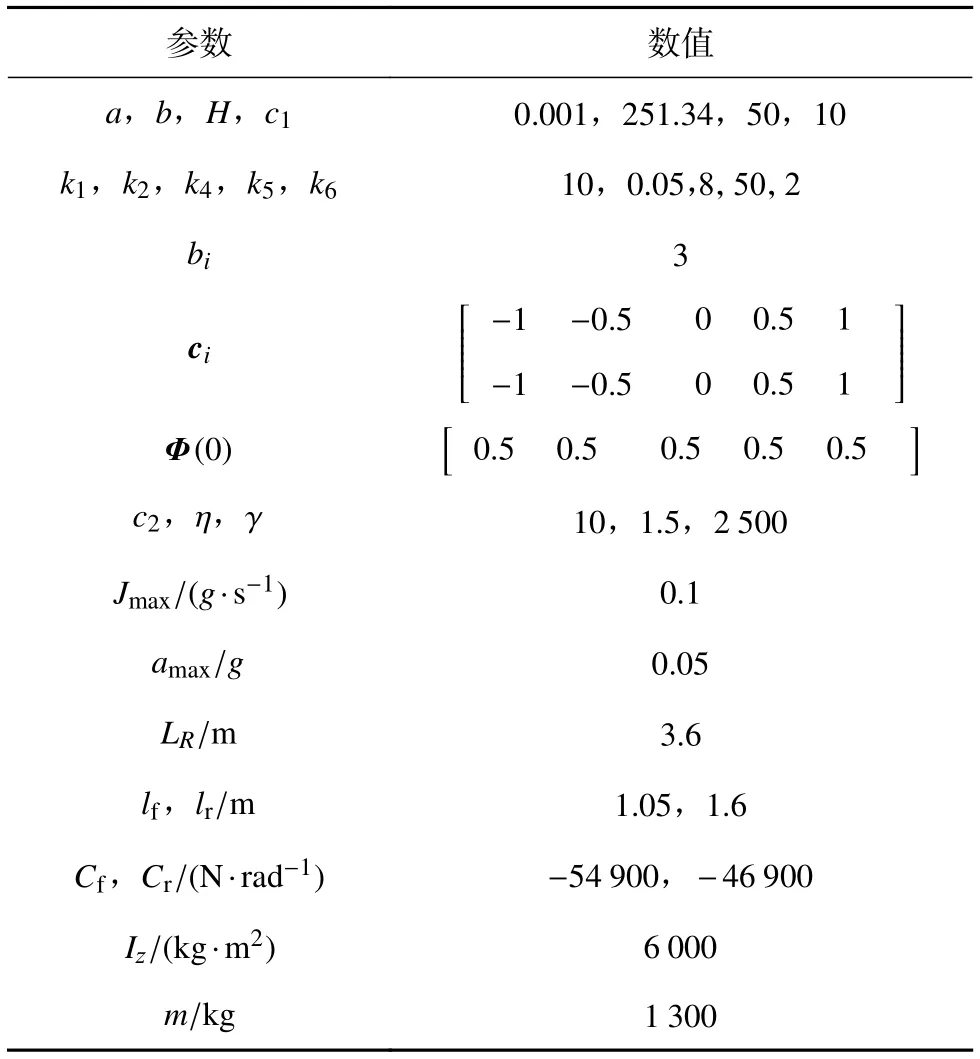
表1 仿真参数
PD控制器和指数趋近律滑模(SMC)控制器为参考对象,进行比较仿真分析和验证。
PD控制器表示为:

其中kP=10,kD=5是比例和微分增益。
SMC控制器由下式给出:

其中控制参数设为kε1=5,kε2=10,c=15。
在初始速度为20 m/s,路面附着系数 µ=0.85进行仿真分析。首先分别设立阶跃转向与正弦转向工况验证控制系统动态响应,其仿真分析如图6所示。
从图6可知,在阶跃与正弦工况下协同控制的前轮转角跟踪误差小于PD控制器和SMC控制器的转角跟踪误差。相比于另外两种控制器,协同控制器响应超调量最小,前轮转角跟踪误差更能迅速收敛到零,系统的输入到输出具有良好的动态响应,提升了车辆转向时的控制精度。
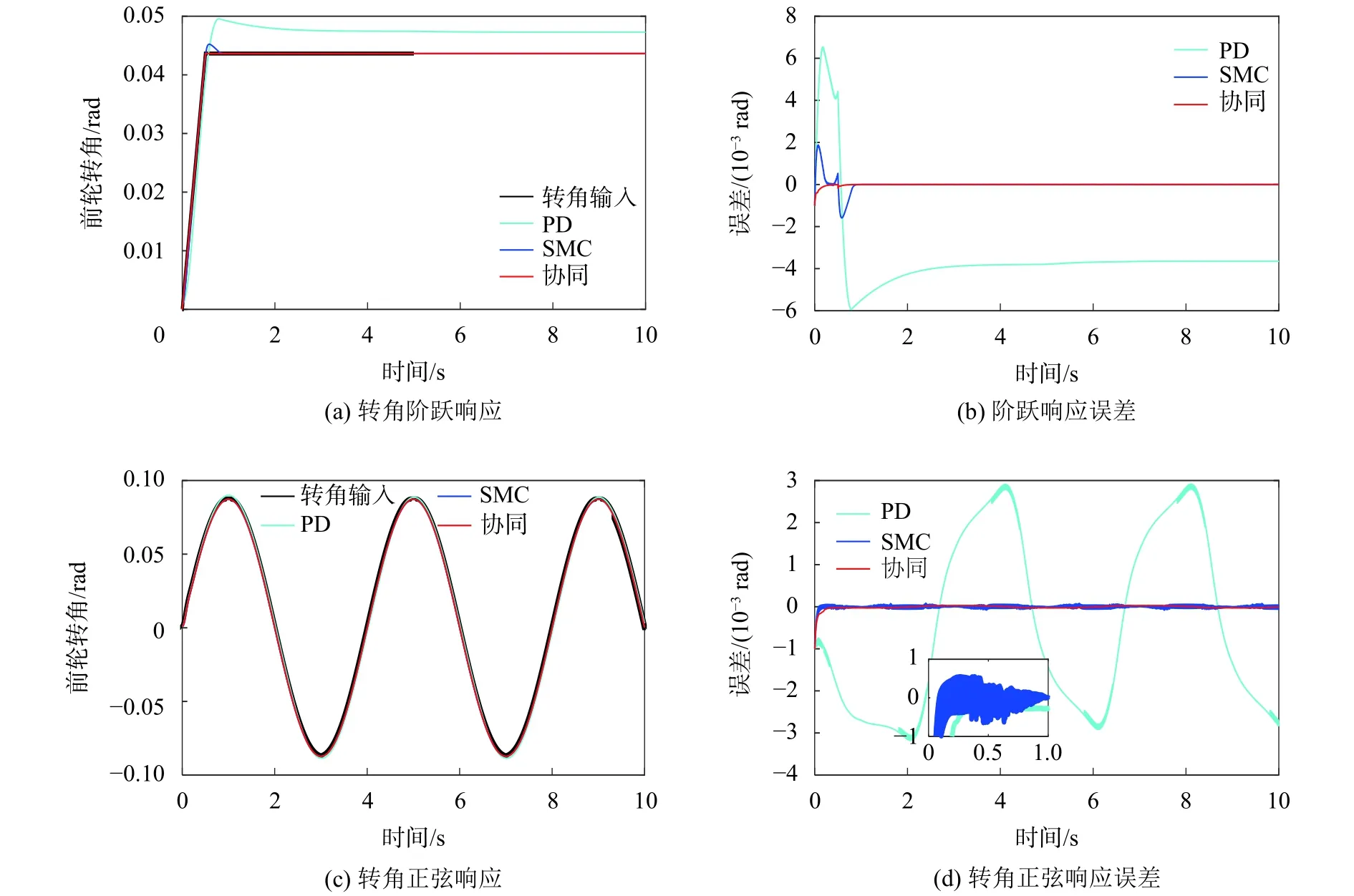
图6 前轮转角阶跃与正弦响应曲线
根据前文的换道参考轨迹,分析不同控制器在换道路径跟踪时的车辆稳定性,仿真结果如图7所示。
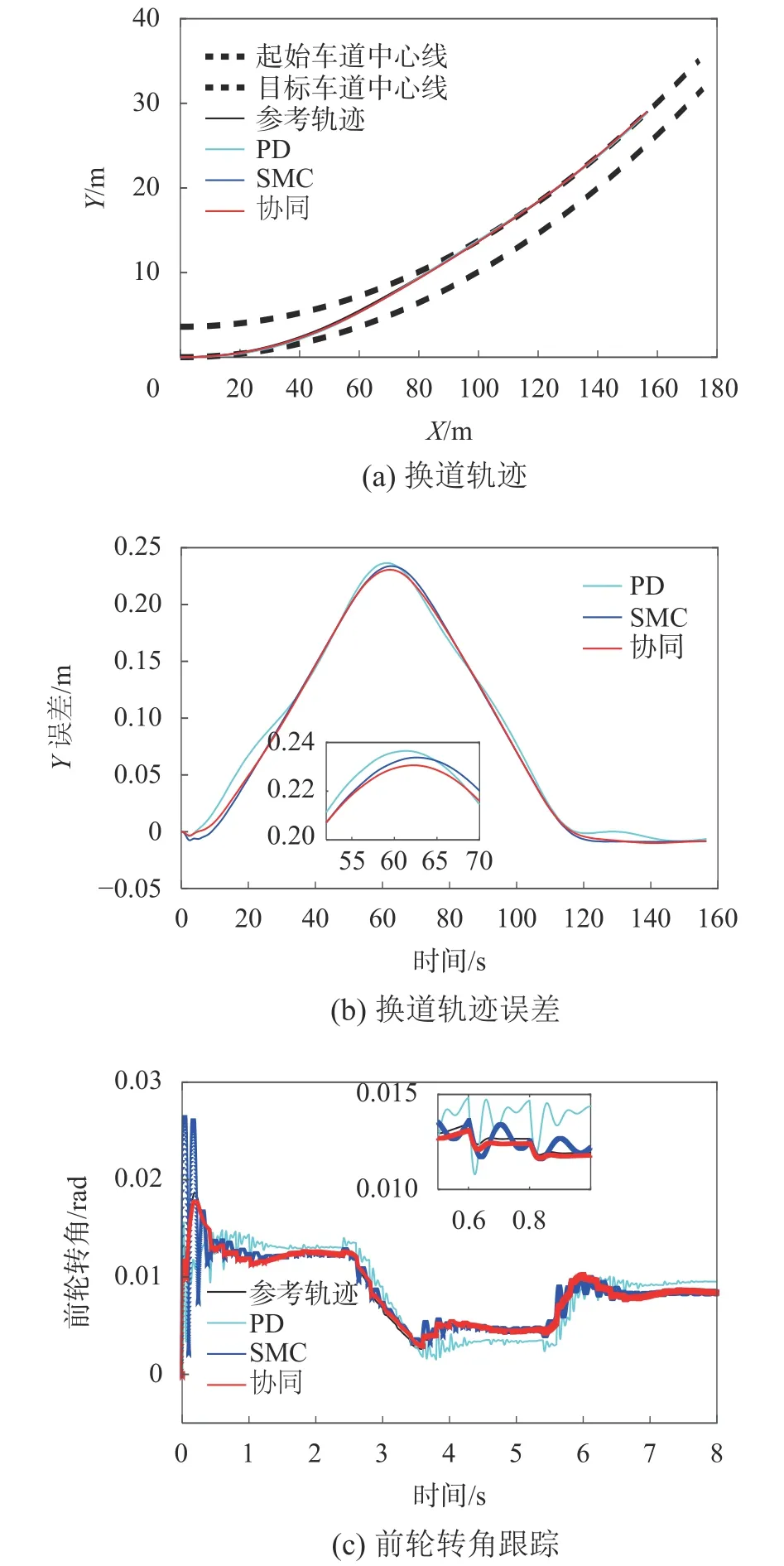
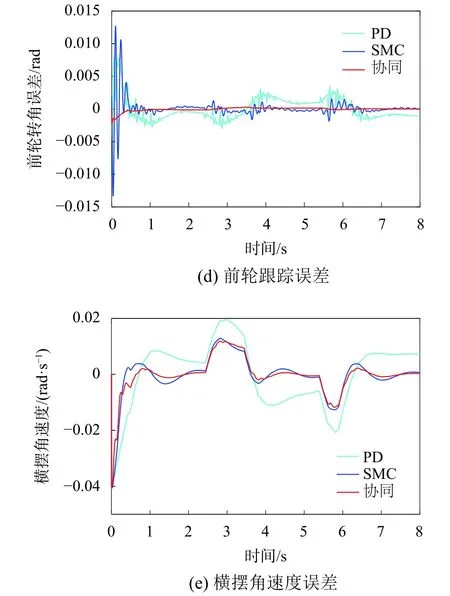
图7 不同控制器下车辆换道路径跟踪
由图7(a)和(b)可知,三种控制器在弯道上车辆进行换道时具有良好的路径跟踪性能,但协同控制器的侧向位移误差最小,其跟踪性能优于PD和SMC控制器;图7(c)表示前轮转角跟踪,PD和SMC控制器前轮转角跟踪的峰值误差在图6(d)中分别为 0.0049 rad 和 0.013 rad,远高于协同控制器。这是因为PD和SMC轨迹跟踪控制器在跟踪前轮转角时都会产生不同程度的抖振,从而影响前轮角跟踪的稳定性。图7(e)中PD控制器控制下的车辆横向稳定性最差,协同控制器的响应速度快于SMC控制器,提高了跟踪精度和行驶稳定性。
为验证该控制器在不同车速下的控制性能,设置三种不同初始速度 10,20,30 m/s,路面附着系数设为0.85,仿真结果如图8所示。
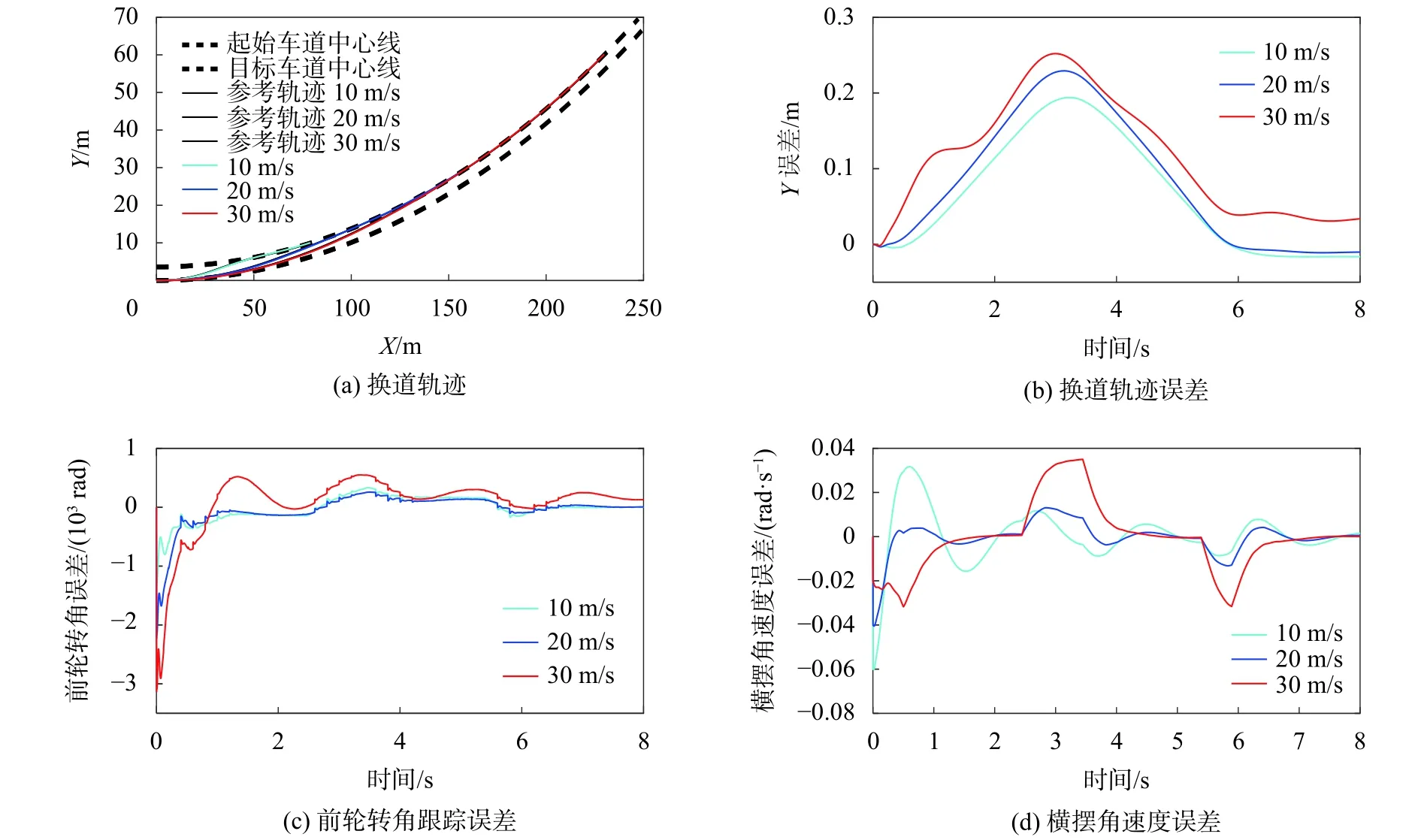
图8 不同速度下车辆换道路径跟踪
从图8可以看出,各性能指标与车速呈正相关。图8(a)和(b)表明协同控制器能够稳定地跟踪不同速度下期望的参考变道轨迹。图8(c)表明,前轮转角跟踪误差均控制在合理范围内,从而保证了路径跟踪过程中车辆在不同速度下的转向性能。当车速为 30 m/s时,图8 (d)中横摆角速度的误差峰值0.0317 rad/s,这些误差仍控制在合理范围内,保证了车辆换道时的操纵稳定性,可知协同控制对车辆速度具有良好的鲁棒性。
4 结束语
通过梯形加速度曲线设计在弯道进行车道变换时的车辆参考轨迹,并基于换道参考轨迹构造了一个新的期望横摆角非线性函数,将换道过程中的车辆路径跟踪转化为期望的横摆角跟踪控制;
针对换道路径跟踪控制设计了一种基于指数收敛扰动观测器的滑模路径跟踪控制器,通过对不确定扰动的在线估计和补偿来减小系统的颤振,从而提高控制系统的收敛速度和控制精度;为了提高智能车辆在弯道变换中的参考轨迹跟踪精度和平顺性,定义了转向和制动系统之间的协同误差模型,并以此模型为基础设计了车轮滑移率的滑模跟踪控制律;仿真结果表明,所提出的控制器能够准确跟踪变道参考轨迹,保证了车辆在换道过程中的行驶稳定性。
猜你喜欢
当代水产(2022年6期)2022-06-29
大电机技术(2022年2期)2022-06-05
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年7期)2016-11-16
