核应急处置机器人重要电气部件γ和中子辐照前后性能对比
2022-04-28 03:43朱性利李宜全汪曼管朝鹏张志义
机械工程师 2022年4期
朱性利,李宜全,汪曼,管朝鹏,张志义
(核动力运行研究所,武汉 430223)
0 引言
核动力装置、核电站和辐照中心运行和维护期间,当主控显示异常情况时,需尽快确认阀门、仪表等状态;在发生承压设备泄漏、主设备损坏、海啸和地震等大型地质灾害时,需尽快获取现场真实泄漏、损坏情况,并根据现场情况采取相应的应急处置、救援作业等。通常在核设施发生事故时,越早获取现场第一手材料,事故处置、救援作业的应对措施也越有效,也能尽最大限度减轻核事故所造成的危害,因此亟需研制核应急处置机器人[1]。
核反应堆运行期间和事故后,通常存在高放射性的γ和中子辐射,核应急处置机器人的抗γ和中子辐照性能对其研制至关重要[2]。为更好地评估核应急处置机器人重要电气部件在γ和中子辐照后的状态变化,在核应急处置机器人开发过程中,针对其使用的重要电气部件,如直流有刷电动机、伺服电动机、锂电池、位置编码器、驱动器等在γ和中子辐照前后进行了多项性能指标的测试和对比。
1 核应急处置机器人组成与结构
核应急处置机器人主要包括机器人本体、自动收放线系统、远程控制箱等。机器人本体通过双摆臂+主履带移动车体的方式实现机器人在核设施复杂环境内的灵活移动,车体上部搭载五轴机械臂,通过机械臂的运动轨迹控制,以及安装在机械臂前端的作业工具的张合、旋转可实现核应急场景下的异物抓取、开关防火门和阀门;控制箱通过光纤连接机器人本体与远程操作箱,实现两者在核设施屏蔽环境下的有线通信;远程操作箱用于机器人本体的远程移动、机械臂作业的远程遥控,并通过车体上携带的云台摄像头、作业工具监视摄像头实现对机器人周边环境及作业工具的远程视频监控。
核应急处置机器人总体结构如图1所示。

图1 NEDRo系统总体结构
核应急处置机器人主要参数如下:质量为98.4 kg;耐γ辐照峰值剂量率为100 Gy/h,累计325 Gy;耐中子辐照,中子注量率为1.06×106n/(cm2·s),累计1.39×1010n/cm2中子注量;辐射探测范围为0~10 Gy/h;越障性能,跨越150 mm高障碍物,攀爬31.7°斜坡。
核应急处置机器人研制所使用的电气部件包括电动机、位置编码器、电动机驱动器、主控板、无线通信模块、光端机、锂电池、交换机等,其中除电动机、位置编码器、锂电池未采用γ、中子屏蔽保护外,其它各电气部件都采用专门的γ、中子屏蔽材料进行集中屏蔽防护,以提升各部件的耐辐照性能。
2 重要电气部件辐照试验描述
2.1 试验系统组成
核应急处置机器人电气部件抗辐射加固验证试验工作主要在中科院上海应用物理研究所、中国科学院核能安全技术研究所进行,通过目视、专用仪器、工器具等完成抗辐射加固各项功能、性能指标的验证试验。
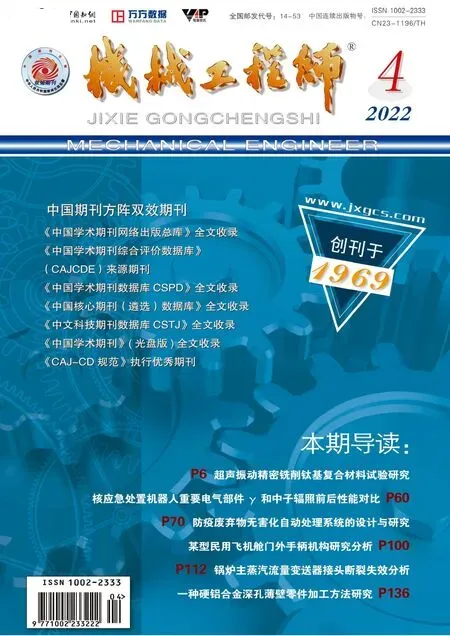
1)γ辐射验证辐射源。γ辐照试验采用中科院上海应用物理研究所的γ辐射试验装置,如图2所示。
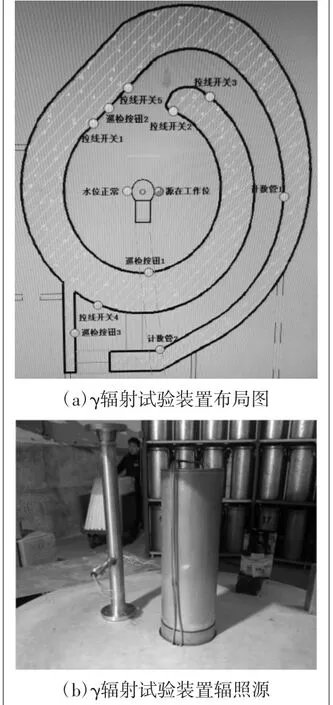
图2 γ辐照试验装置
试验装置主要指标如下:辐照源强度为15.8 万Ci;最小剂量率为72 Gy/h;最大剂量率为10 kGy/h。
2)强流聚变中子源装置。中子辐照试验采用中国科学院核能安全技术研究所的强流中子源与辐射技术综合实验平台进行验证试验。试验装置如图3所示。
图3 强流中子源实验装置
实验装置主要技术与性能指标:单能中子实验条件为2.5 MeV/14 MeV;宽能谱中子实验条件为热中子~20 MeV;最高中子源强技术指标为1012n/s。
3)测试用仪器和设备。测试过程中所使用的仪器和设备如表1所示。

表1 控制系统测试用设备
4)被测对象。机器人重要电气部件采用与机器人同样型号的驱动器、主控板、无线模块等组成的电气部件性能测试模块,用于对中子、γ辐照测试前后的电气部件进行性能指标变化的测量、对比和功能验证,被测的电气部件如图4所示。

图4 被测重要电气部件
被测的电气部件型号如下:驱动器型号为Whi-20/100;主控板型号 为 Cm2 -500;无线模块型号为UT1900-S;光端机型号为COE-B-4523-41-1;锂电池规格为24 V、15.6 A·h;交换机型号为AOK-IES100501;伺服电动机;石墨电刷直流电动机;位置编码器。
2.2 试验环境选择和条件
1)γ辐照试验方案。γ辐照试验时,根据本次辐照验证试验剂量率要求,在辐照室内预先测量好剂量率为100 Gy/h的多个位置,将机器人电气部件放置在辐照室内,电气部件前端面应放置在预设位置更靠近γ放射源处,以保证机器人重要电气部件前端面γ剂量率不低于100 Gy/h。辐照测试期间,每隔特定时间进行重要电气部件的功能验证,以确认该段辐照期间各项功能正常。γ辐射试验设备布局示意图如图5所示。

图5 γ辐射试验设备布局示意图
2)中子辐照试验方案。根据累计注量要求,拟将机器人电气部件放置于试验平台上,对应辐照前端面的注量率水平为≥1×106n/(cm2·s),具体运行参数以样品的实际尺寸及布放位置进行调整,最终达到≥1×1010n/cm2的累计注量。在中子累计注量达到要求后,等待环境剂量下降至许可水平,将其从辐照场内取出,在实验室进行重要电气部件功能验证和性能指标测试,验证电气部件的抗中子辐射水平。
中子辐照试验时试验设备布局如图6所示。

图6 中子辐射试验设备布局示意图
2.3 试验方法
2.3.1 基准判定
在非辐射环境条件下对机器人重要电气部件的各项功能和性能进行验证、测试,并在辐照前的验证试验结果记录表中记录测量结果,其测试数据作为抗辐射加固验证试验的数据基准。
2.3.2 中子抗辐射加固验证试验方法
在中科院合肥核能安全技术研究所进行中子辐照验证试验,采用强流中子源实验装置作为辐射源,环境温度为室温,主要完成以下验证试验:
1)在机器人电气部件前端面中子注量率为106n/(cm2·s)的辐射场内,采用“原位在线”方式通过远程操作平台确认机器人电气部件的各项功能是否正常。
2)累积辐射时间达到3 h,前端面中子注量达到1010n/cm2后,采用“原位在线”方式通过远程操作平台确认机器人电气部件的各项功能是否正常。
3)将机器人电气部件从辐射场内退出,在预先布置的无辐射测试区域进行电气部件性能测试。
2.3.3 γ射线抗辐射加固验证试验方法
在中科院上海应用物理研究所进行验证试验,采用60Co作为辐射源,环境温度为室温,主要完成以下验证试验:
1)在机器人电气部件前端面环境剂量率为100 Gy/h的辐射场内,采用“原位在线”方式通过远程操作平台确认电气部件的各项功能是否正常。
2)累积辐射时间达到3 h,剂量达到300 Gy后,采用“原位在线”方式通过远程操作平台确认机器人电气部件的各项功能是否正常。
3)将机器人电气部件从辐射场内退出,在预先布置的无辐射测试区域进行机器人整体和电气部件性能测试。
2.3.4 电动机测试方法
电动机测试通过采用专用仪器对辐照后的电动机线圈电阻、电感、绝缘电阻、转矩和转速等进行测量,以验证辐照后对电动机性能影响。受测量条件和测量仪器耐辐照指标影响,电动机测试在辐照后的非辐照区进行。
1)线圈电阻和电感测试。测量伺服电动机A-B、B-C、C-A的线电阻和线电感,并将测量值转换为25 ℃的换算电阻值。直流有刷电动机只需测试1个线圈的相电阻和相电感。
2)绝缘电阻测试。将电动机的所有线圈终端短接到一起,在终端和地之间施加测试电压,读取60 s时刻的电阻值。注意所施加的测试电压不应超过线圈绝缘的额定电压。
3)转矩和转速测试。电动机与转矩、转速传感器和负载配合可得到电动机的转速和转矩特性曲线。将被测电动机、传感器、磁滞负载通过联轴器连接,并固定在测试平台。通过控制磁滞负载输入的励磁电流,产生一定的转矩,通过测量被测电动机、磁滞负载之间的传感器参数,从而获取被测电动机的转矩和转速特性[3]。
2.3.5 位置编码器测试方法
位置编码器测试通过采用专用仪器对辐照后的线圈电阻、电压变比等进行测量,以验证辐照后对位置编码器性能的影响。受测量条件和测量仪器耐辐照指标影响,位置编码器测试在辐照后的非辐照区进行。通过多功能测试系统测量位置编码器的电阻,从而获取线圈电阻。
2.3.6 锂电池测试方法
锂电池测试通过采用专用仪器对辐照后的锂电池容量进行测量,以验证辐照后对锂电池性能的影响。受测量条件和测量仪器耐辐照指标影响,锂电池测试在辐照后的非辐照区进行。
测量锂电池容量时,通过对充满电的锂电池在测试仪内置负载范围内持续放电,记录起止时间,并通过积分计算获得锂电池容量[4]。
2.3.7 驱动器测试方法
驱动器的性能指标变化可以通过所连接电动机的实际输出转矩和转速来测量分析。分别测试辐照试验前后电动机输出转速和转矩的实际值,再结合电动机辐照前后的线圈电阻和电感,可以分析驱动器在辐照实验前后的输出性能变化情况。
另外,通过采用原位在线的功能试验测试驱动器的工作是否正常。将驱动器、电动机、主控板等连接好之后放置于辐射环境中,在电动机轴上安装涂有颜色标志的圆盘,人员操作端通过线缆引出至非辐射环境。人员在远端操控电动机按一定转速旋转,观察电动机旋转是否卡顿、是否停止等。
2.3.8 通信链路测试方法
通信链路分为有线模式和无线模式。两种模式共同包含的元件包括交换机、主控板,无线模式还包括无线传输发射模块,有线模式包括光端机。
有线通信链路测试采用原位在线测试。测试时,将驱动器、电动机、主控板、光端机等连接好之后放置于辐射环境中,在电动机轴上安装涂有颜色标志的圆盘,人员操作端通过线缆引出至非辐射环境。人员在远端通过光端机操控电动机启停或者调速,观察电动机是否按发送的指令响应,同时测试响应的实时性和成功率。
2.4 辐照测试结果
机器人电气部件γ、中子辐照测试验证如图7所示。记录机器人电气部件辐照前后的性能测试数据。

图7 机器人电气部件γ及中子辐照
1)石墨电刷直流电动机。直流电动机的测试结果如表2所示。

表2 直流电动机辐照前后性能对比
2)伺服电动机。伺服电动机的测试结果如表3所示。

表3 伺服电动机辐照前后性能对比
3)锂电池。锂电池的测试结果如表4所示。

表4 锂电池辐照前后性能对比
4)位置编码器。位置编码器的测试结果如表5所示。

表5 位置编码器辐照前后性能对比
5)驱动器。直流电动机和伺服电动机测试结果对比如表6所示。

表6 用直流电动机和伺服电动机检测驱动器性能对比
6)通信链路。光端机、交换机、光纤等组成的有线通信链路经过γ、中子屏蔽材料进行加固后,通过在原位在线辐照检验中未发现通信错误或明显可见通信延迟;辐照完成后,交换机、无线模块等组成的无线通信链路未发现通信错误或明显可见通信延迟。
3 结论
1)未采取辐照加固的机械臂手抓监视摄像头在峰值剂量率为100 Gy/h的γ辐照条件下,工作约1.67 h后失去工作能力,累计剂量约167 Gy,且在多次重启后无法恢复。
2)锂电池在1.06×106n/(cm2·s)中子注量率,在累计1.39×1010n/cm2中子注量后,可正常工作,但电池容量发现约4.2%下降;锂电池在峰值剂量率为100 Gy/h,累计剂量为325 Gy的伽玛射线条件可正常工作,锂电池容量未发现变化。
3)直流有刷电动机、伺服电动机和位置编码器等电气部件未采用γ、中子屏蔽材料进行防护,在1.06×106n/(cm2·s)中子注量率,累计1.39×1010n/cm2中子注量后,可正常工作;在峰值剂量率为100 Gy/h,累计剂量为325 Gy的伽玛射线条件可正常工作。
4)驱动器、光端机、无线模块、交换机等采用γ、中子屏蔽材料进行加固后,在峰值剂量率为100 Gy/h,累计剂量为325 Gy的伽玛射线条件正常工作,在1.06×106n/(cm2·s)中子注量率、累计1.39×1010n/cm2中子注量条件下功能正常。
猜你喜欢
宇航计测技术(2022年4期)2022-09-07
网络安全与数据管理(2022年1期)2022-08-29
核安全(2022年3期)2022-06-29
辐射防护通讯(2022年1期)2022-06-11
科学技术创新(2021年5期)2021-03-17
——编码器
演艺科技(2020年7期)2020-08-13
宇航计测技术(2019年3期)2019-10-29
表面工程与再制造(2019年3期)2019-09-18
航天器环境工程(2019年2期)2019-04-25
物理学报(2019年6期)2019-04-10