通讯时延和外部干扰下多无人机事件触发滑模编队控制
2022-09-28 08:40冀明飞廖佳文
辽宁石油化工大学学报 2022年4期
冀明飞,李 涛,廖佳文,杨 欣
(南京航空航天大学 自动化学院,江苏 南京 210016)
近年来,随着计算机和通讯网络的发展,无人机(Unmanned Aerial Vehicle,UAV)编队控制问题引起了学者的广泛兴趣,并取得了许多优秀的成果[1-2]。UAV编队控制方法主要分为领航-跟随法、虚拟结构法、基于行为法和基于一致性理论法四大类。领航-跟随法由于其稳定性好和灵活性强的优点被广泛采用,并取得了丰硕的成果。文献[3]利用领航-跟随法,研究了具有开关拓扑的多智能体的可控性问题。
UAV飞行环境极其复杂,因此外部干扰的影响是不可忽视的。针对控制系统中存在的干扰,学者们开展了大量的研究[4-5]。文献[6]研究了外部扰动下编队系统轨迹跟踪控制问题,采用滑模控制器技术保证了系统的鲁棒性。同时,编队内各UAV间的通信总会受到通信带宽、电磁干扰、设备故障等因素的影响。因此,为了避免过量的数据传输造成网络波动,研究人员提出切换事件触发机制[7]和动态事件触发机制[8等事件触发机制[9],并进行了大量改进。然而,大量的数据丢失可能会降低系统性能。为了取得数据传输量和控制性能之间的平衡,文献[10]提出了包含更多已传输数据的记忆事件触发机制。此外,通讯时延会造成网络化系统控制性能下降甚至失稳。为此,学者开展了大量研究,文献[11-12]通过构造滑模面来补偿通讯时延,并提出了滑模控制设计方案。因此,需要将记忆事件触发和滑模控制结合以解决通讯网络中存在的时延与干扰等影响。
本文考虑通讯时延和有界外部干扰,采用领航-跟随法实现期望的UAVs编队控制;通过引入控制输入反馈,设计了一个包含动态阈值的自适应记忆事件触发机制;针对通讯时延和有界干扰设计了滑模控制器,达到了补偿时延影响、对干扰保持较强鲁棒性的目的。
1 问题描述
在研究编队控制问题时,设n架固定翼UAV为相同类型,借鉴文献[13]的模型,建立UAV的位置子系统、姿态子系统模型,如式(1)-(2)所示。

本文采用领航-跟随法,将选用5架固定翼UAV组成编队,并确定1架为领导者,采用分布式编队控制策略,邻居UAV之间可以保持相互通讯,而领导者可与每架UAV进行通讯。为了描述简单,将每一架UAV都视为编队系统中一个节点,并设领导者UAV编号为0,将4架跟随者UAV依次编号为1、2、3、4。无人机编队通信拓扑图如图1所示。

图1 无人机编队通信拓扑图
有向图G=(N,S)代表UAV之间的通信网络拓扑结构,其中N={v1,v2,…,vN}代表节点集,S={(vi,vj)∣vi,vj∈N}为边集。根据图论原理,定义C2=[cij]N×N为邻接矩阵,其中cij代表节点vi和节点vj之间的通信权重,如果节点vi能接收到节点vj的信息,则cij>0;否则cij=0。定义度矩阵D2=diag{c1,…,cN},其中拉普拉斯矩阵可以表示为L=D2-C2。进一步,可以定义扩展矩阵H=C1+L,其中C1=diag{c10,c20,…,cN0}。如果第i个跟随者UAV可接收到领航者UAV的信息,则ci0=1;否则ci0=0。
假设1假设本文的有向图G是连通的,即领导者UAV和跟随者UAV之间至少有一条通道,则C1为单位矩阵。
引理1[14]如果有向图G是连通的,则矩阵H是对称且正定的。
引理2[14]假设矩阵R>0,常数标量r>0,k>0,u∈(0,1),定义向量其 中如 果 存 在 矩 阵Yi∈Rn×n,则不等式成立。其中,ψ(t)=
引理3[15]根据引理1,存在一个能满足条件UTU=I的酉矩阵U可以使给定等式UTHU=Λ=diag{λ1,…,λN}成立。其中,I是单位矩阵;λi是矩阵H的特征值,且满足λN≥…≥λ3≥λ2>λ1>0。
2 控制器设计
在UAVs编队存在外部干扰和通讯时延的情况下,针对位置子系统和姿态子系统分别设计了控制器,使整个无人机系统能实现编队飞行。
2.1 位置子系统控制器设计
基于文献[2]研究方法,利用质点运动来简化UAV在编队中的运动轨迹,同时在输入端考虑外部干扰的存在。定义和扩展向量即第i个跟随者UAV的运动模型可以描述为:

定义第i个跟随者UAV的期望状态为xdi(t),且满足(t)=Axdi(t),则跟踪误差可以表示为(t)=xi(t)-xdi(t),并通过应用矩阵Kronecker积策略,进一步可以获得:

2.1.1 记忆事件触发机制设计 为了降低UAVs跟随者之间的通讯压力,引入控制输入反馈,设计一种新型记忆事件触发机制。定义采样周期为h,触发时刻均为采样周期的整数倍,因此假设{ti0h,ti1h,…,tikh,tik+1h,…}是第i个跟随者UAV的触发时间序列,则设计事件触发条件为:

式中,S为已传输数据的数量为状态触发误差为控制输入误差为S个已传输状态量的均值;Ω为正定矩阵;ϑi(t)为动态触发阈值;标量ε>0;μs∈(0,1]为预设的参数,且满足针对时变阈值ϑi(t)设计如下的调节条件:

式中,δs(s=1,…,S)为预设参数,其取值与触发时刻在时间尺度的远近相关,且满足和ρ为正值且满足(δ+ρ)∈(0,1];σs>0(s=1,…,S),ϖ>0为可调常数。可调参数取值可以确保时变触发阈值ϑi(t)∈(0,δ+ρ]⊆(0,1]。
2.1.2 滑模控制器设计 在时间区间t∈[mh,mh+h)中,可定义通讯时延为η(t)=t-mh,则η(t)∈[0,h)。基于式(5)-(6)中记忆事件触发机制设计,引入控制输入反馈,定义滑模方程hi(t)为:

式中,C为给定的常数矩阵;K为控制器增益。需要特别指出的是,因为B为列满秩矩阵,所以必定存在合适矩阵C使CB存在逆矩阵。
根据式(7)可知,当触发误差和控制输入误差的和大于已传输状态量的均值时,满足触发条件,此时的采样值会通过通讯网络传输,并更新存储的已传输量,为下次判定做准备。控制输入反馈的引入可以增加触发的灵敏度。
定义ωi1(t)=xi(tki h)-x(mh)为最近一次的触发误差,通过应用Kronecker-product策略,式(7)可转化为:

同时,设计滑模控制器为:

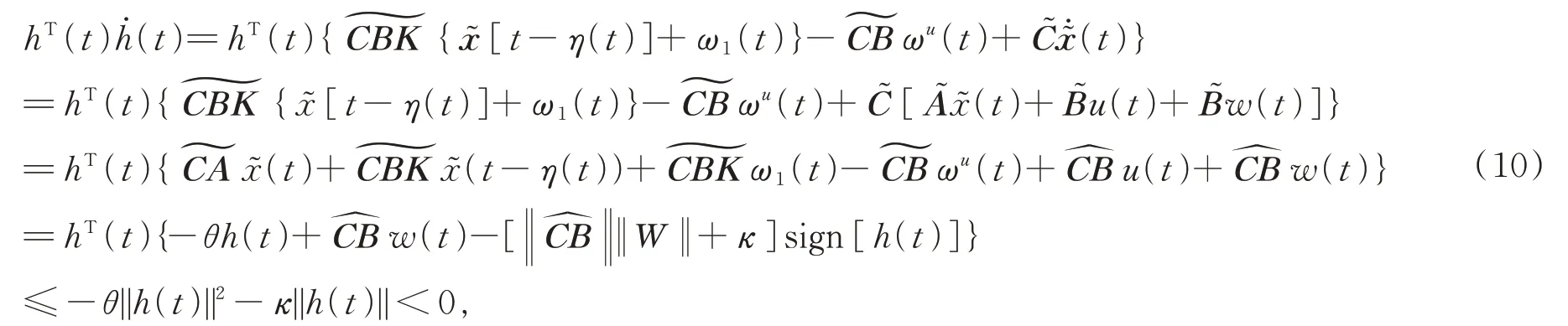
当式(10)得到满足时,即滑模面的可达性条件达成,系统状态将在有限时间内到达滑模面。另一方面,当系统处于滑模面时,h(t)=0,结合式(9)可得控制器的等效控制项为:

将式(11)代入式(4)可得整个闭环系统在滑模面上的闭环系统模型为:

由于系统已满足滑模面可达性条件,为了保证稳定性,只需要选取合适的控制器增益K和触发参数Ω,使式(12)中闭环系统滑动模态稳定。
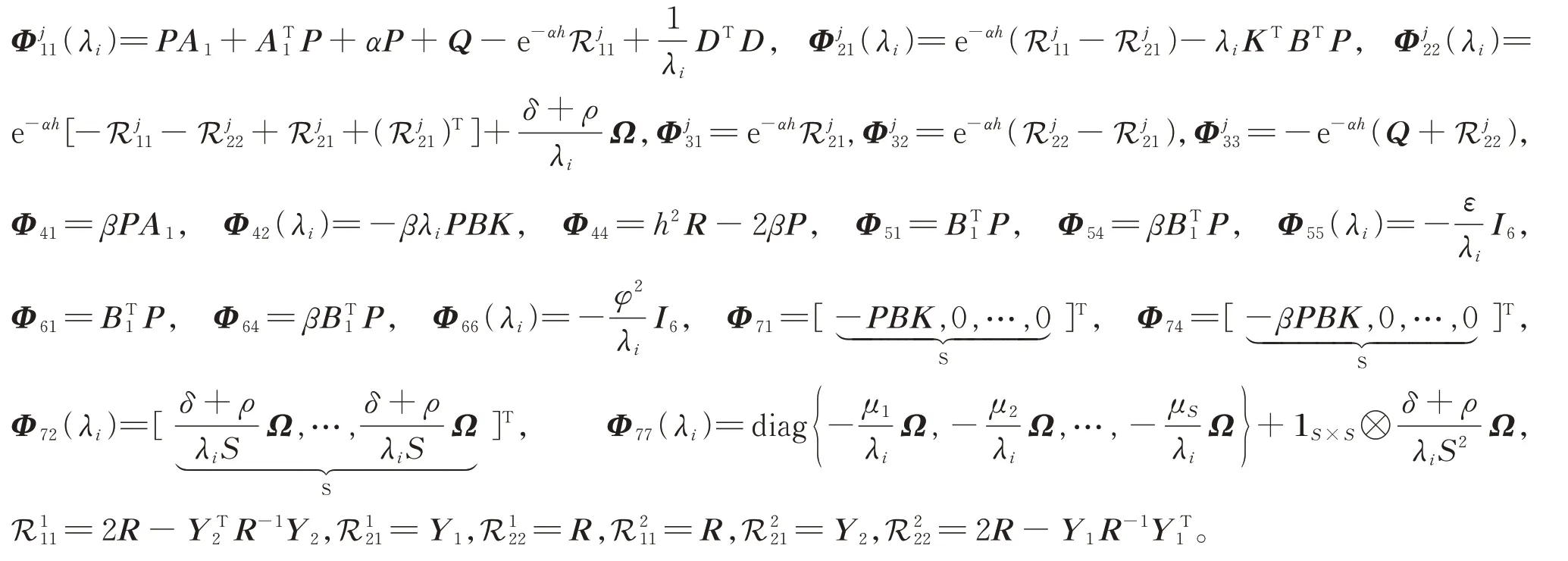
定理1基于式(5)-(6)中记忆事件触发机制,给定矩阵H和正值参数α、β、δ、ρ、ε、h、μs(s=1,…,S),如果存在适当矩阵K、Y1、Y2和正定矩阵P、Q、R、Ω,满足矩阵不等式(13),则式(12)中闭环系统滑动模态在H∞扰动抑制水平φ下是稳定的。
式中,*为对称矩阵中的对称项;i=1,…,N,j=1,2。矩阵Φj(λi)的各项分别为:
证明考虑输入端具有有界外部干扰时,式(12)的闭环系统滑动模态的渐近稳定条件和鲁棒性能指标为:

构建Lyapunov-Krasovskii函数为:

对V(t)进行求导,可得:

为了保证式(12)的闭环系统可以达成在H∞扰动抑制水平φ下稳定,要求式(17)成立:

通过运用引理2,引入式(5)和式(12),并给定β,可以进一步得到:
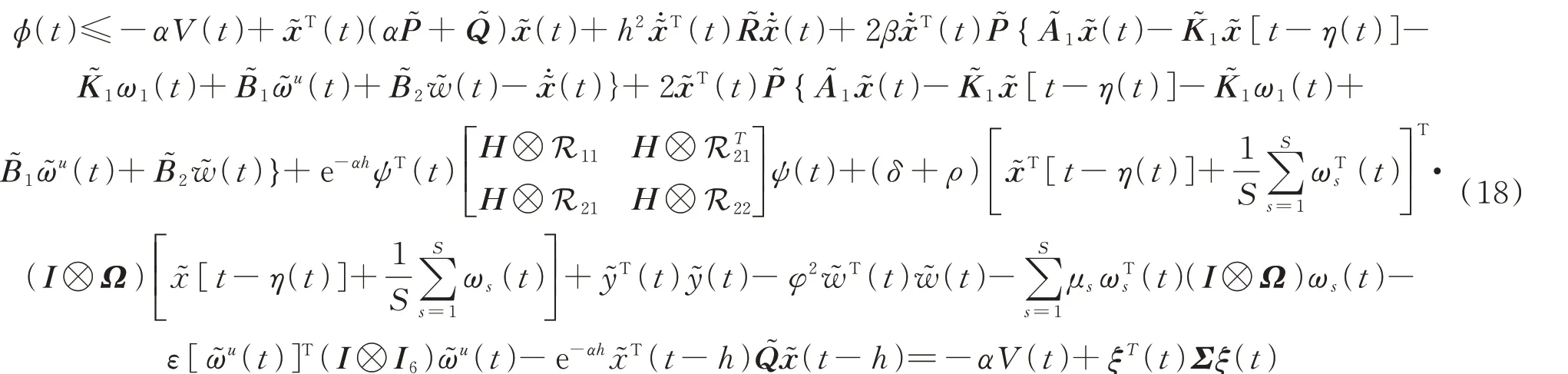
矩阵Σ可表示为:


定 义F=[F1,F2,…,FN],其 中,F1=[f1,fN+1,…,fN2-N+1],F2=[f2,fN+2,…,fN2-N+2],…,FN=[fN,f2N,…,fN2]。fi∈RN2(i=1,…,N2)代表第i个元素为1而其余元素均为0。

对于t∈[0,∞),V(t)>0和α>0是确定性条件,所以当式(19)成立时,可保证式(18)成立。因而,进一步可得:

在定理1中,控制器增益K并不能直接求解,因为未知矩阵K和P相互耦合。另外,矩阵H所有特征值都参与矩阵不等式的求解,求解难度太大。因此提出定理2以克服上述两个缺点。
定理2基于设计的记忆事件触发机制,给定矩阵H和正值参数α、β、δ、ρ、ε、h、μs(s=1,…,S),如果存在适当矩阵Y、Y1、Y2和对称矩阵满足以下线性矩阵不等式,则式(12)的闭环系统滑动模态在H∞扰动抑制水平φ下是稳定的。

式中,i,j∈{1,2};u1=λ1;u2=λN,且矩阵Γj(ui)的各项分别为

特别是,控制器增益K和触发参数Ω可以分别由K=YX-1和Ω=X-1ΩˉX-1得出。
证明首先,基于式(13)的矩阵不等式,引入下列新的矩阵其中,X=P-1。

根据引理3可知,满足λi≤λN,因此可以验证如果式(22)成立,则式(13)一定成立。定理2证毕。
2.2 姿态子系统控制器设计
对姿态子系统设计姿态跟踪控制器。首先,将位置子系统得到的虚拟控制量与当前采样的姿态信息结合,求解得到姿态的设定值。根据式(1)和式(2)可得姿态的设定值分别为:

式中,vih、γih、χih分别为速度、航迹倾角和航向角的采样值;vid、γid、χid分别为速度、航迹倾角和航向角的设定值。在实际飞行过程中,UAV的姿态是有限的。因此,设定vid≤vmax,γid≤γmax,χid≤χmax。
由于3个姿态对应的模型结构类似,因此只给出速度的跟踪控制器。设计一阶低通滤波器为:


对式(25)进行求导,并将式(2)代入,可得:

本文采用动态面的控制方法,只需要对vid进行定性分析。由于vid是有界的,因此,v̇id也是有界的量,可以假设其上界为Mdv>0,则满足:

同时,可以进一步得:

式中,θ1是正值参数。
由式(24)解得:

实际控制量为vic,设计vic的控制器为:

式中,系数kvi>0。
将式(28)-(30)代入式(26),整理可得:


当选取k1、θ1足够大时,可保证<0,则Vvi趋向于一个足够小的值,表明姿态跟踪控制器可以确保跟踪误差足够小。
3 仿真算例
为了验证本文设计控制方法的有效性,利用Matlab软件进行编队飞行仿真分析。
记忆事件触发机制的参数设置为δ1=0.030,δ2=0.010,δ3=0.005,δ4=0.005,δ=0.050,ρ=0.05,σ1=1,σ2=1,σ3=1,σ4=1,ϖ=0.5,ε=0.001,μ1=0.80,μ2=0.10,μ3=0.05,μ4=0.05。采样周期和整个采样时间分别设置为h=0.05 s,T=30 s,同时闭环系统模型参数C、D和有向图的相关矩阵C1、H分别为:

基于上述设定参数,选取α=0.1、β=0.1和鲁棒性能φ=0.5,对定理2中的线性矩阵不等式进行联合求解,可得到所需结果:

定义领导者UAV的状态为x0(t),满足ẋ0(t)=Ax0(t),则跟随者UAV的期望状态分别为:

同时,所有UAVs初始状态在表1中给出。

表1 无人机的初始状态
假 设外部干扰 分 别 为:w1(t)=[0.1 0.2 0.3]Tsin(t),w2(t)=[-0.1 0.1 0.2]Tsin(t),w3(t)=[0.1-0.2-0.3]Tsin(t),w4(t)=[-0.1-0.2 0.3]Tsin(2t)。
在UAV动力学模型式(2)中,时间常数分别为:τv=2.0 s,τγ=0.5 s,τχ=0.5 s;由于各个无人机采用的姿态控制器相同,所以这里只给出UAV1的控制参数。速度v1、航迹倾角γ1和航向角χ1的滤波器和控制器参数分别为:τ1=0.005,τ2=0.005,τ3=0.005,kv1=100,kγ1=50,kχ1=50。
利用上述设定值完成仿真,跟随者UAV的位置跟踪误差如图2所示。从图2可以看出,随着时间的推移,跟踪误差趋向于零。UAV1的姿态跟踪误差如图3所示。从图3可以看出,在控制初期误差曲线会出现震荡,最后会稳定在足够小,保证了UAVs编队飞行的达成。

图2 跟随者无人机的位置跟踪误差

图3 UAV1的姿态跟踪误差
为了更直观地观察编队过程,图4显示了UAV三维空间运动轨迹。图5-6分别给出了滑模面的变化曲线和UAV1的事件触发瞬间和触发间隔。仿真总时间为30 s,采样周期为0.05 s,信号原本应该传输600次,由于记忆事件触发机制的引入,4个跟随者UAV实际传输次数分别为184、161、182、280,这表明本文设计的记忆事件触发机制维持了系统稳定和信号传输量之间的平衡,可以在不破坏系统稳定的前提下降低跟踪者UAV之间的通讯压力。
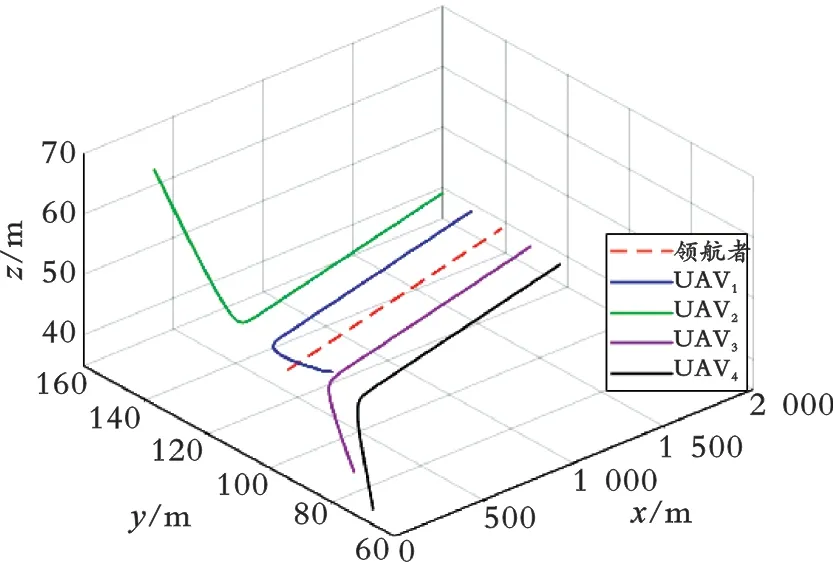
图4 无人机编队轨迹
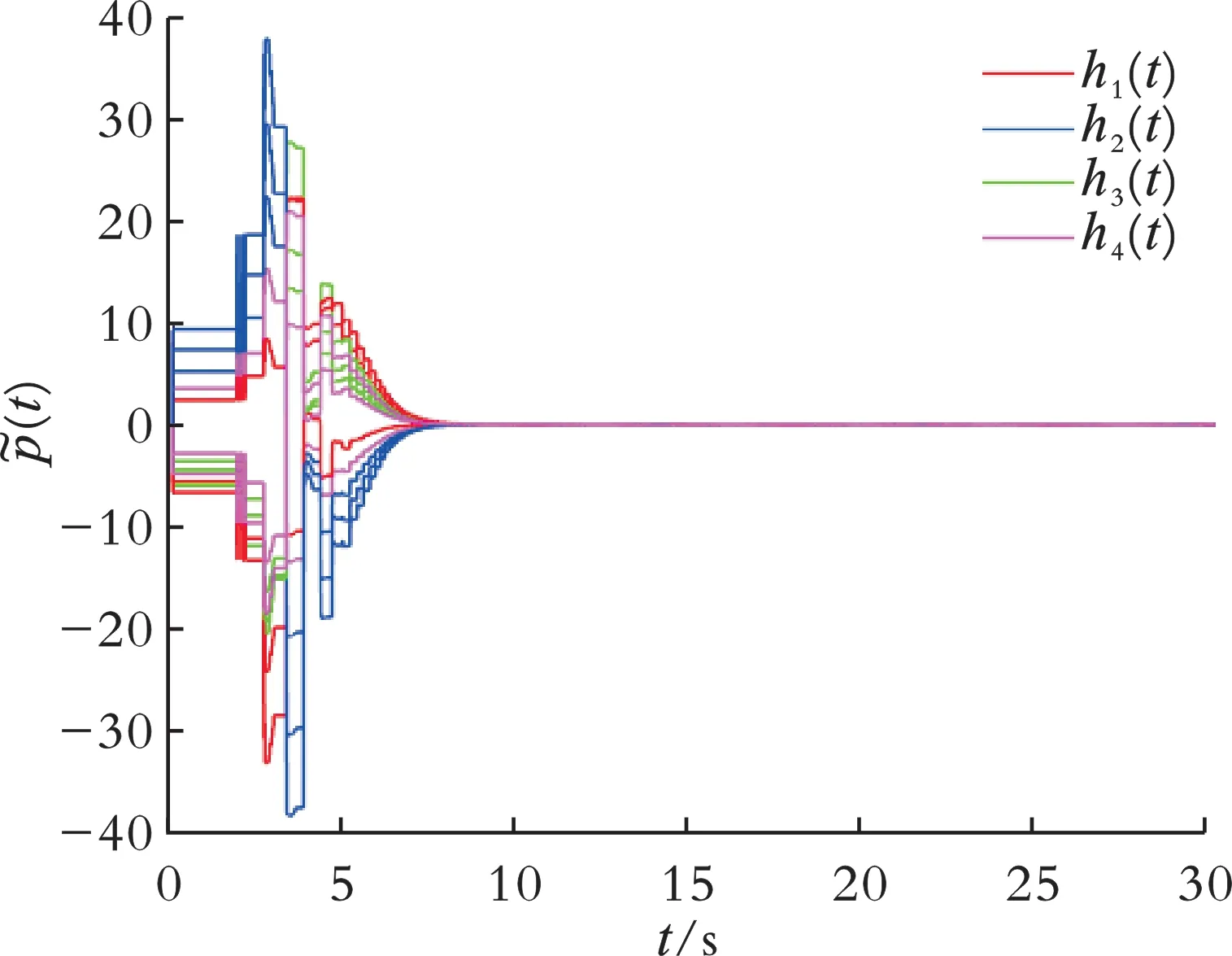
图5 滑模面的变化曲线
为了进一步表明引入记忆事件触发机制的必要性,进行了时间触发机制的比较仿真,仿真结果如图7所示。由于过多采样与传输,导致通讯时延影响被累积放大,延缓了控制的速度。上述分析结果表明,本文设计的控制方法可有效完成期望的UAVs编队控制目标。

图6 UAV1的记忆事件触发时间间隔

图7 时间触发机制下的位置跟踪误差
4 结论
考虑UAV编队过程中存在通讯时延和有界外部干扰的实际问题,完成了控制器的设计。首先,建立了UAV的二阶模型,并采用领航-跟随法实现了UAVs的编队飞行。其次,通过引入控制反馈设计了一种新型的自适应记忆事件触发机制,并应用滑模控制技术,不仅保证了控制性能,而且相应地解决了通讯时延和干扰的不利影响。再次,应用Lyapunov理论和H∞控制理论给出了闭环系统稳定性的证明,并给出了便于滑模控制器增益和触发参数求解的策略。从次,设计了姿态跟踪控制器将虚拟控制量转化为实际控制指令。最后,通过数值仿真验证了所提控制算法的有效性和可行性。
猜你喜欢
数字海洋与水下攻防(2022年4期)2022-09-01
舰船科学技术(2022年10期)2022-06-17
西部交通科技(2022年2期)2022-04-27
计算机测量与控制(2021年10期)2021-11-01
电脑知识与技术(2021年22期)2021-09-14
电脑知识与技术(2021年22期)2021-09-14
现代信息科技(2021年21期)2021-05-07
速读·上旬(2019年2期)2019-10-21
花火B(2019年3期)2019-04-27
中国广播(2017年9期)2017-09-30