尾翼式低旋高超声速制导炮弹弹道特性分析
2022-11-01 11:44王旭刚
兵器装备工程学报 2022年10期
朱 胤,王旭刚
(1.中国船舶集团有限公司第七一〇研究所,湖北 宜昌 443000;2.南京理工大学能源与动力工程学院, 南京 210094)
1 引言
20世纪末诞生的一些高超声速武器,如电磁炮、电热化学炮等,利用特殊的发射技术,能够将炮弹发射到5马赫以上,实现高超声速和远程飞行,具有飞行高度高、飞行速度快、飞行空域广的特点,是当前军工领域的研究热点。但高超声速炮弹在飞行时,气动特性非线性变化、耦合性强、所受的干扰不确定,给其稳定性和弹道特性分析带来了困难,故研究其运动模型和弹道特性具有重要意义。
常规弹箭的稳定方式主要包括两类:尾翼稳定和旋转稳定。尾翼稳定即通过在弹体上加装尾翼,实现风标式稳定,对于高超声速弹箭而言,这种稳定方式多用于高超声速导弹、探空火箭以及一些非轴对称弹型等复杂的高超声速飞行器上;旋转稳定即使弹体高速旋转以形成陀螺稳定,多用于轴对称弹型,而对于有控弹箭,过高的转速可能导致制导控制系统(如鸭舵)失效,因此,这种稳定方式在一些高超声速制导炮弹上并不适用。
高超声速炮弹所受的空气动力大,由质量分布不均或外形关于纵轴不对称带来的干扰可能会被无限放大。为使其飞行稳定,消除外形不对称的干扰,可使弹体低速滚转,如此既能保持飞行稳定,又不会因转速过大而导致控制系统失效。目前,部分国内外学者已做出了一些可借鉴的成果,文献[9]中提出了一种尾翼式高超声速弹型并讨论了其气动特性,通过尾翼前缘的斜切面迫使来流在尾翼处产生推力,从而形成尾翼导转力矩,促使弹体滚转,达到飞行稳定;文献[10]中利用对自由飞行实验的测量获得了低速滚转下高超声速炮弹的气动参数,通过理论分析验证了低速旋转稳定在高超声速炮弹中实施的可行性;文献[11]中通过在钝锥模型表面布置人工绊线强迫边界层转捩,采用自由度不受约束的风洞模型试验技术研究边界层转捩对高超声速旋转钝锥自由飞行运动特性和气动特性的影响规律,为低速滚转高超声速炮弹的稳定性分析提供了参考。文献[12]中以电磁轨道炮为例,对不同初速和射角下电磁炮弹的射程进行了仿真,并分析了不同初速和射角对其弹道特性的影响;文献[13-14]中在高超声速炮弹的六自由度运动模型中加入了科氏力的影响并进行了仿真,获得了考虑科氏力后的弹道仿真曲线,为本文的研究提供了参考。
然而,高超声速武器诞生较晚,动力学问题复杂,在现有的文献中,针对具体弹型的全弹道特性的研究极少,导致高超声速武器工程化缺乏理论参考。因此,本文针对如图1所示的8片尾翼式低旋高超声速炮弹,弹型参数见表1所示,建立适配的6-D运动方程,根据小扰动假设将6-D运动方程线化并建立自由扰动运动方程,研究其低速滚转稳定性;然后基于6-D运动方程仿真计算并分析不同射角、转速以及考虑地球自转等因素后的弹道特性变化规律,为高超声速炮弹总体设计提供参考。

图1 某高超声速炮弹弹型示意图Fig.1 The figuration of a hypersonic projectile
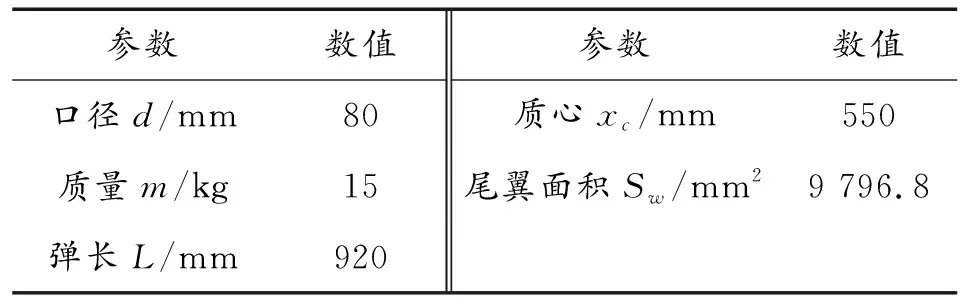
表1 弹型参数Table 1 Figuration parameters
2 动力学模型
假设地球为标准两轴旋转椭球体,其长半轴=6 378.14 km,短半轴=6 356.76 km,扁率=129826,自转角速度=7.29×10rad·s;
为研究弹体的滚转特性,除常规坐标系外,还须引入准弹体坐标系和准速度坐标系,攻角、侧滑角也须转换成准攻角和准侧滑角。
2.1 气动力系数
低速自旋的高超声速炮弹所受空气动力沿准速度坐标系可分解为阻力、升力和侧力,气动阻力系数、升力系数和侧力系数、、分别表示为
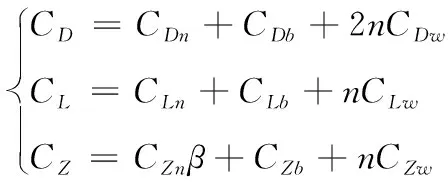
(1)
式中:=4为尾翼对数;(=,,)分别为炮弹头部、弹身、尾翼的阻力系数;分别为炮弹头部、弹身、尾翼的升力系数;分别为炮弹头部、弹身、尾翼的侧力系数。其中,高超声速炮弹头部阻力、升力系数分别表示为

(2)
式中:为炮弹头部内接圆锥半顶角。
弹身中段阻力、升力系数为

(3)
式中:为边界层外缘雷诺数;为阻力修正系数;为弹身中段表面积;为弹身中段长细比。
尾翼阻力、升力系数为
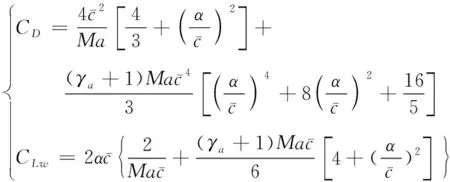
(4)


(5)
2.2 科氏惯性力Fc、牵连惯性力Fe
=-m为科氏惯性力,=-m为牵连惯性力。科氏加速度和牵连加速度的表达式分别为
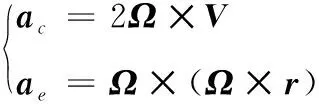
(6)
式中:为炮弹速度矢量。
为研究地球自转的影响,本文将牵连惯性力从重力中分离出来同科式惯性力单独讨论,将地球引力视为重力。含地球转速的示意图如图2所示,假设在北半球地心纬度为处发射一枚高超声速炮弹,射击方向为从正北方开始顺时针旋转角的方向,记为发射方位角。取射击点处为坐标原点,建立地面坐标系,轴水平指向射击方向,轴垂直于地球表面指向上,轴与其他两轴垂直且构成右手坐标系。
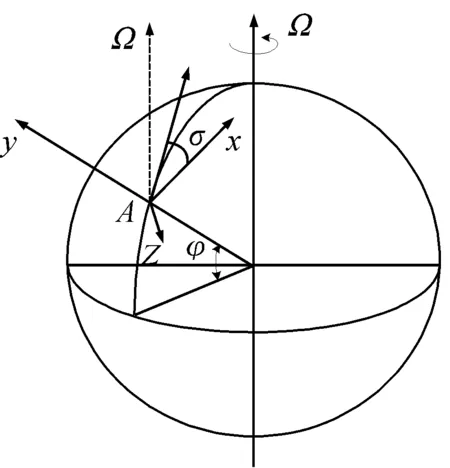
图2 地球转速示意图Fig.2 Earth’s rotating speed
地球自转角速度在其极轴方向,将其平移至射击点,则得地球自转角速度在地面坐标系上的分量为
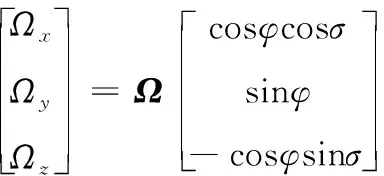
(7)
2.3 6-D运动方程
综上,可得无推力时高超声速炮弹的6-运动模型为

(8)

3 自由扰动方程
实际飞行过程中的炮弹不可能完全按照基准弹道(未扰动弹道)飞行,因为总会有一系列随机因素作用于炮弹,对其运动产生扰动。为研究尾翼式自旋高超声速炮弹的飞行稳定性,可在小扰动假设下将其6-D运动方程线化,建立自由扰动运动方程,再分析其稳定性。实际运动,即扰动运动中,所有运动参数可写成
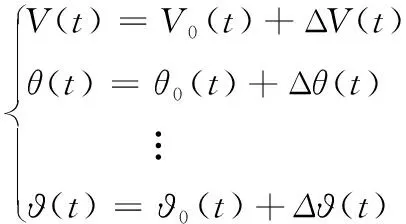
(9)
式中:下标“0”表示未扰动运动中运动参数的值;Δ()、Δ()、…、Δϑ()为对应运动参数的偏量。低旋高超声速炮弹飞行受到扰动时,运动参数即产生偏量,各运动参数的偏量都对弹道特性产生影响。
由于炮弹质量关于纵轴对称,因此弹体的惯性主轴与其几何中心轴重合,即=;且扰动运动中,高超声速炮弹的滚转角速度和未扰动运动中的一样。基于上述假设,利用运动参数的偏量将6-D运动方程线化,略去速度偏量方程和其他方程中速度偏量的影响以及重力法向分量变化sinΔ对弹道转动速度偏量dΔd的影响,再引入动力系数,可得简化后的自由扰动运动方程为

(10)
其中,各动力系数的含义如表2所示。
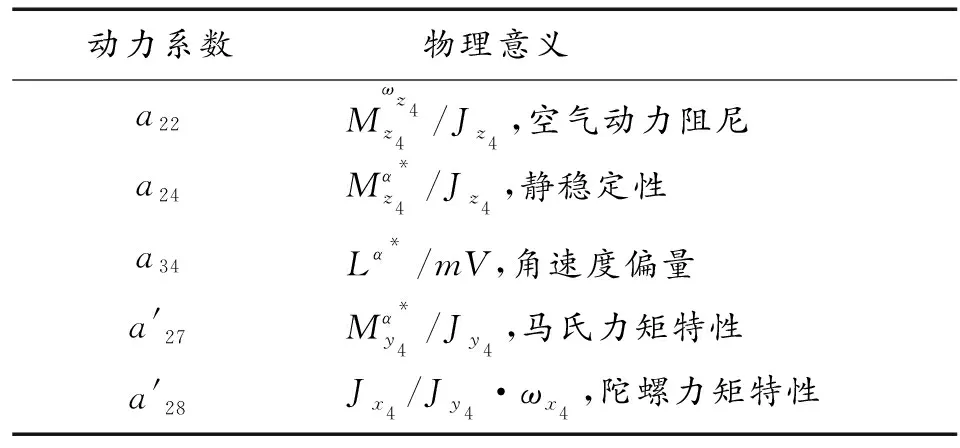
表2 动力系数的含义Table 2 Definition of the dynamic coefficients
从表2可以看出,自由扰动运动方程(10)中包含了陀螺稳定性、马格努斯力矩、转速及气动力对尾翼式自旋高超声速炮弹动态稳定性的影响。由式(10)可知,尾翼式自旋高超声速炮弹的自由扰动运动方程中有6个未知变量,分别为扰动偏量Δϑ、Δ、Δ、Δ、Δ、Δ,要研究各个偏量的变化规律及其对炮弹稳定性的影响,需对式(10)的特征方程进行求解,若其所有特征根的实部均小于零,则式(10)稳定;否则,式(10)不稳定。然而方程组(10)的变量个数较多,求解起来较为繁琐,此时可借助复角及复合指令系数的方法将其简化,即令
(11)
(12)
用虚数单位分别乘以式(10)中的第1、3、5诸式,然后与2、4、6诸式相加,同时将式(12)代入其中,可得

(13)
式(13)即为简化后的描述尾翼式自旋高超声速炮弹自由扰动运动的方程组,其包含了所有扰动偏量对炮弹运动的影响,在采用了复角和复合指令系数的方法后,其未知变量由初始时的6个缩减为3个,降低了求解难度。若求解其特征方程后所得的实根或复数根中的实部小于零,则说明尾翼式自旋高超声速炮弹各项运动参数的偏量将随时间的增长而减小,即其在飞行过程中能够保持飞行稳定;反之,则不稳定。
另外,可分别采用调整射角和导转力矩在6-D运动方程中的初值,以及在不同地球模型下进行弹道仿真的方法,分别分析射角、平衡转速、地球转速及扁率对尾翼式自旋高超声速炮弹弹道特性的影响。
4 弹道仿真及分析
4.1 稳定性分析
对方程组(13)求解,设有如下指数函数形式的特解
Δ=,Δ=,Δ=Re
(14)
式中:、、、都是常数,根据式(14)满足式(13)的条件来确定。
将式(14)及其相应的变量对时间的导数代入式(13)中,消去共同因子,得
(15)
式(15)是关于、、的线性齐次代数方程,只有当是其特征方程的根时,式(13)的解才有如式(14)的形式。令式(15)的系数行列式等于零,展开后得特征方程
++=0
(16)

方程(16)有一个明显的根,即=0,除此之外,另外两特征根根、为


(17)

(18)
式(18)即为保证尾翼式自旋高超声速炮弹弹体动态稳定性的条件式,由式(18)可知:
1) 气动阻尼系数||(<0)越大,实际运动中对弹体的快、慢圆运动越有利,对动态稳定性越有利;
2) 静稳定系数||(<0)和法向力系数越大,攻角平面内的升力使速度矢量向弹轴靠拢的能力越大,起到阻尼攻角增大的作用,因此对稳定性有利;


由于动力系数随马赫数的变化而变化,、并非定值,而是随时间变化的,需对具体弹箭进行弹道仿真后,代入相应的弹道参数进行求解。
针对文献[15]中的高超声速弹形,基于前文所建立的6-D运动方程对其进行弹道仿真。假设发射地点在北半球的北纬=32°处,发射时的发射角为=40°,初速=2 500 m/s,发射方向为正东方,即发射方位角=90°,在无风的标准大气模型下仿真计算后得该自旋高超声速炮弹的纵向外弹道曲线如图3。从仿真结果可知,在该初始条件下,该弹的射程为413.1 km,弹道高度88.8 km,落点速度1 375 m/s。
方案1(纯天然气发电方案):计划于“十四五”期间投产1台9.5 MW的J920机组和2台42 MW的6B型机组,至2025年总供电容量为149 MW;于“十五五”期间投产1台42 MW的6B型机组,至2030年总供电容量为191 MW。

图3 纵向外弹道曲线Fig.3 Longitudinal exterior ballistic curve

图4 共轭复根的实部随时间的变化曲线Fig.4 The real part of the conjugate complex roots with time
从仿真结果得知,在整个飞行过程中,两根、实部的最大值为179×10,即两共轭复根的实部总是小于零,说明对应运动参数的扰动变量Δ、Δ、Δ均随时间的增长而减小,即自由扰动运动方程中的变量Δϑ、Δ、Δ、Δ、Δ、Δ都随时间的增长而减小,该弹的自由扰动运动是稳定的。该结果表明,高超声速炮弹受到外界扰动作用并离开原有的飞行状态时,通过低速滚转能够使其在干扰消失后且不借助于控制力的情况下恢复到原有的状态,亦即低速自旋高超声速炮弹具有良好的弹体稳定性,能够保持飞行稳定。
4.2 射角对射程、弹道高的影响
射角主要影响炮弹的射程和弹道高。要研究射角对自旋高超声速炮弹弹道特性的影响,可调整6-D运动方程中射角的初值,通过仿真计算,分析计算结果即可获得低速自旋高超声速炮弹的射角对弹道特性的影响。
图5、图6分别为椭圆大地假设下该高超声速炮弹在不同射角下所对应的射程和弹道高的曲线。
图5 射程随射角变化的曲线Fig.5 Range curve with angle of fire
图6 弹道高随射角的变化Fig.6 Trajectory height with angle of fire
从仿真结果可以看出,当射角在0~60 °的范围内变化时:本文研究的高超声速炮弹的射程先增大后减小,在射角=50°时,射程达到最大值457.2 km,因此,该高超声速炮弹的最大射程角为50°;弹道高度随射角的增大而非线性地增加,在最大射程角=50°时,弹道高=137.9 km。
由此可见,低速自旋的高超声速炮弹的射程随射角的增大而先增大后减小,弹道高随射角的增大而增大;变化趋势均呈非线性。
4.3 平衡转速对散布的影响
尾翼式自旋高超声速炮弹通过尾翼导转力矩来提供转速,低速旋转可使其不对称因素的作用不断改变方向,且前后影响相互抵消,从而减小射弹散布,因此,平衡转速的大小可能影响自旋高超声速炮弹的散布大小。平衡转速与尾翼导转力矩正相关,炮弹在飞行过程中平衡时有尾翼导转力矩与极阻尼力矩的值相等,即
-=0
(19)
因此,在6-D运动方程中,平衡转速的变化体现在尾翼导转力矩的变化中,通过调整不同平衡转速时所对应的尾翼导转力矩系数的值,同时,采用蒙特卡洛法,选取合理的弹道偏差因素及其分布,便可仿真计算出相应平衡转速下的自旋高超声速炮弹的散布大小变化规律。
在无风的标准大气模型下采用蒙特卡洛方法计算该高超声速炮弹的射弹散布时所采用的偏差因素及其均方差如表3所示,本文拟定各偏差因素的偏差量均服从均值为0的正态分布。

表3 6-D蒙特卡洛散布仿真偏差因素及其均方差Table 3 Deviation distributions of 6-DOF Monte Carlo dispersion simulation

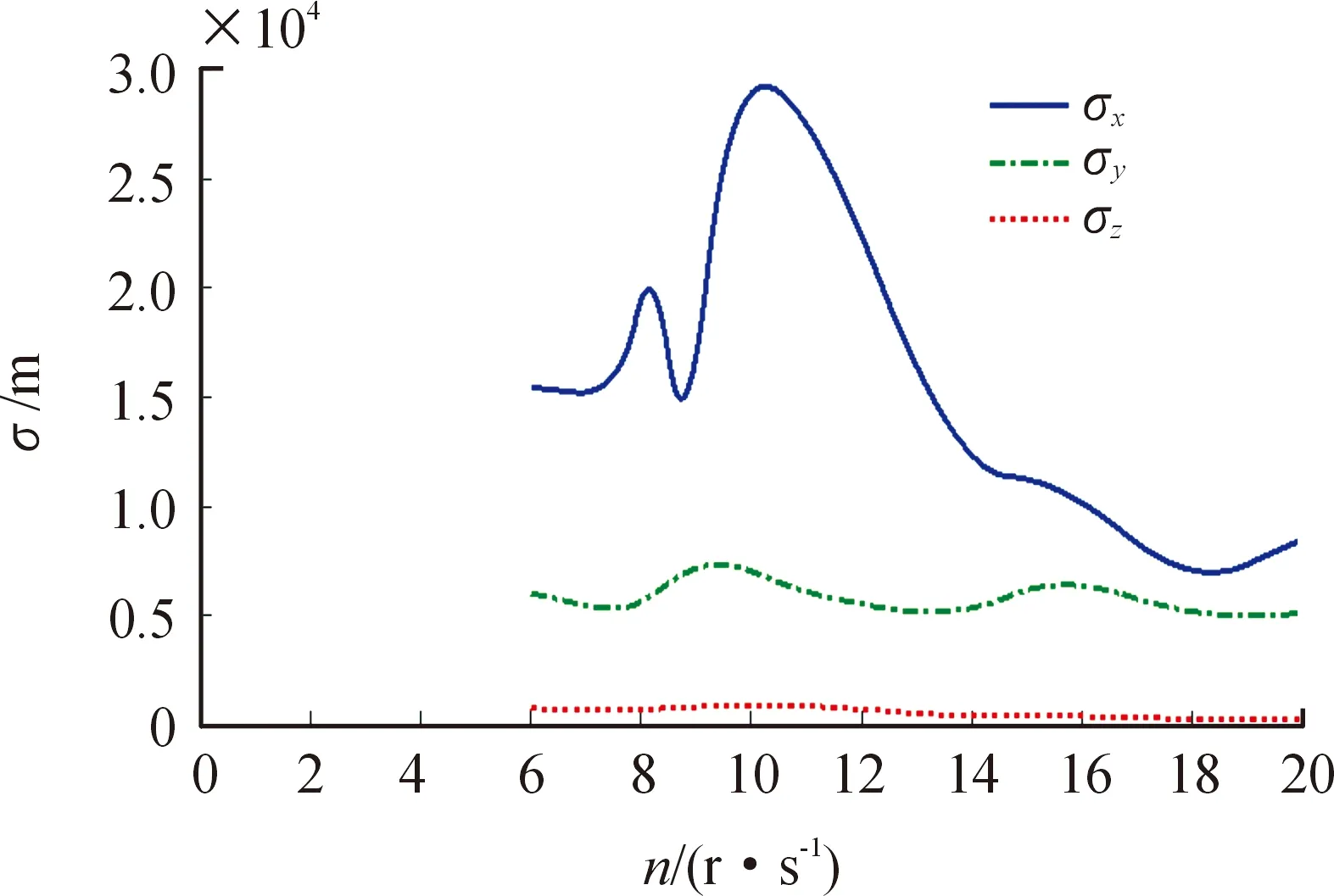
图7 射程、弹道高、侧偏标准差随平衡转速变化的曲线Fig.7 The Std.curve of range/ballistic height/lateral displacement with balanced rotating speed
从图7可以看出,当平衡转速在6 r·s至20 r·s内变化时,射程、弹道高及侧偏的标准差均随其变化而波动,其中,射程的标准差最大,随平衡转速的变化也最明显:① 当平衡转速<7.6 r·s以及>14.5 r·s时,射程的标准差的波动相对平缓;② 当平衡转速76<<14.5 r·s时,标准差波动的幅值较大,且在=8.7 r·s时达到极小值15.0 km,在=10.3 r·s时达到极大值29.3 km;③ 当>14.5 r·s时,在=18.8 r·s时达到极小值7 km。弹道高的标准差随的变化与射程的类似,且当=9.4 r·s时最大,为7.3 km;当=18.9 r·s时最小,为4.9 km。侧偏标准差在=10.3 r·s达到最大,为931 m,在=18.8 r·s时最小,为231 m。
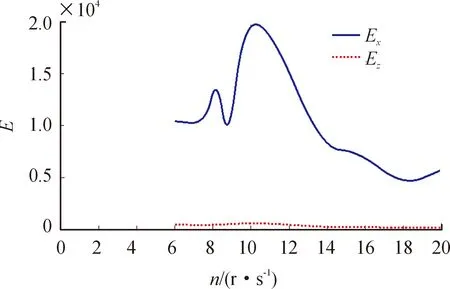
图8 散布随平衡转速的变化曲线Fig.8 Dispersion curve with balanced rotating speed
从图8可以看出,落点处的纵向散布及侧向散布随平衡转速的变化规律同射程及侧偏的标准差的变化规律相同。从图9可以看出,同样地,纵向散布分别在=87 r·s和=18.8 r·s时达到极小值10.1 km和4.7 km,在=10.3 r·s时达到极大值19.8 km;侧向散布在=18.8 r·s时最小,为156 m。
从仿真结果可知,尾翼式低旋高超声速炮弹的射弹散布主要在纵向散布上,即使最小时也有7 km,要减小散布的影响,后续的研究中须在炮弹上加上制导控制系统(如鸭舵)对高超声速炮弹加以控制,即尾翼式高超声速制导炮弹。而控制系统的控制信号周期与炮弹绕纵轴的滚转周期必须严格同步,转速太大时操纵机构来不及换向,可能导致控制过程发生混乱,性能降低,同时转速太大还会导致马格努斯力矩太大;且仿真结果还表明,转速较大时落点速度减小,使得击中目标时的动能减小,毁伤能力降低。综上所述,虽然本文研究的自旋高超声速炮弹的散布在平衡转速=8.7 r·s和=18.8 r·s分别取得极小值,且=18.8 r·s时最小,但应当把平衡转速设计在8.7 r·s左右,以适配控制系统的控制能力,同时增加落点动能。
4.4 地球转速及扁率对弹道特性的影响
地球转速对自旋高超声速炮弹弹道特性的影响主要体现在科氏惯性力和牵连惯性力上,如果忽略地球自转,将地球视为平面大地,可能产生较大的仿真误差。考虑地球扁率时,将地球视为标准两轴旋转椭球体,即椭圆大地假设;否则,将地球视为圆球,即球形大地假设。
扁率对弹道特性的影响主要体现在重力加速度的不同上,重力加速度的大小随高度变化,在地球子午面内将其沿炮弹矢径和垂直于矢径的方向分解为
=+
(20)
其中

式中:、为单位矢量;为牛顿万有引力系数,为地球质量;=32为考虑地球扁率后,对作为均质圆球时的地球引力加速度修正后的修正系数,=108×10。由式(1)可以看出,若不考虑地球扁率,把地球视为均质圆球,此时=0,则炮弹所受的重力加速度正好表示为
′=-
(21)
因此,为研究地球转速和地球扁率对自旋高超声速炮弹弹道特性的影响,可通过删减6-运动方程中的科氏惯性力项、、和牵连惯性力项、、,以及采用不同的重力加速度式(20)、式(21)的方法,仿真计算出模型改变前后的弹道特性变化规律。
运用上述方法,采用不同地球模型时,该自旋高超声速炮弹射程的仿真结果在初速=2 500 m/s时随射角变化的曲线如图9。

图9 不同地球模型下的射程仿真结果曲线Fig.9 Range simulation results under different earth models
从图9中可以看出,当<42°时,球形大地假设下自旋高超声速炮弹的射程仿真结果略大于椭圆大地假设;当42°<<53°时,球形大地假设下的射程与椭圆大地假设的差值逐渐增大,明显高于椭圆大地假设,且最大射程角提前至49°,最大射程达4712 km,比椭圆大地假设下50°射角时的最大射程多出140 km;射角<53°时,平面大地假设下的炮弹射程最小,当>53°时,球形大地假设下的炮弹射程依然大于椭圆大地假设,而当>57°时,平面大地假设下的射程超过球形大地假设。从仿真结果可以看出,除了采用球形大地假设时最大射程角附近的射程明显高于椭圆大地假设以外,其他射角下无论采用球形大地假设还是椭圆大地假设,对射程的影响均在10m的量级内,可忽略不计,而采用平面大地假设时的炮弹射程与另2种的差值在10m的量级。
图10为采用不同地球模型时的弹道高度在初速=2 500 m/s时随射角变化的曲线。
从图10可以看出,采用不同地球模型时自旋高超声速炮弹的弹道高均随射角的增大而增大。采用平面大地假设时的弹道高小于另2种假设,差值在10m的量级,而采用球形大地假设和椭圆大地假设时的弹道高度相差仅在10m的量级。因此地球扁率对高超声速炮弹弹道高的影响可忽略不计。
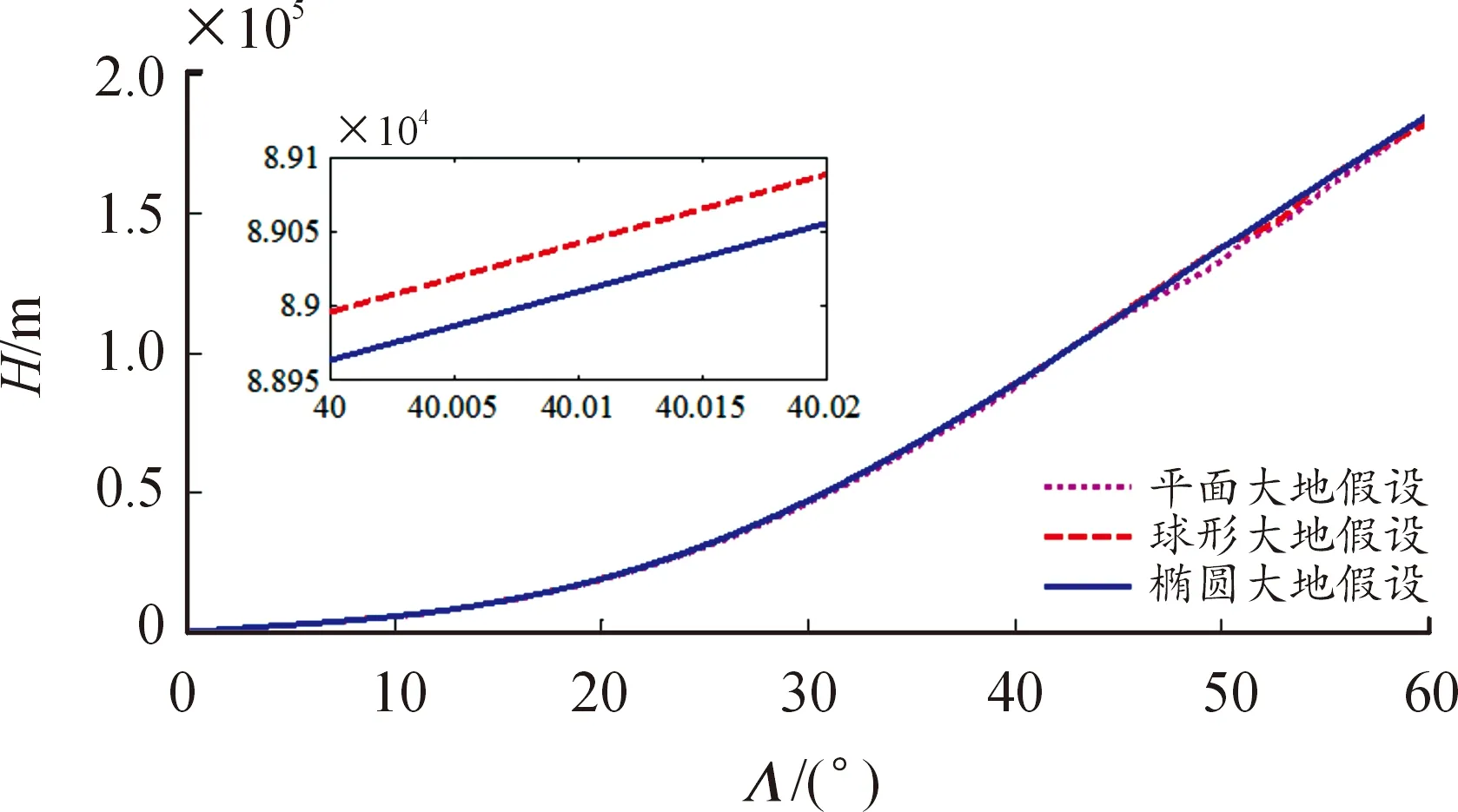
图10 不同地球模型下的弹道高度仿真结果曲线Fig.10 Trajectory height simulation results under different earth models
仿真结果还表明,采用球形大地假设或椭圆大地假设时的侧偏也相差不大,二者的误差在允许的范围内,而采用平面大地假设时侧偏极小,因此地球转速对自旋高超声速炮弹侧偏的影响不能忽略;3种大地模型下的落点速度也基本重合,误差均在允许范围内,因此地球转速和扁率对落点速度的影响较小。
综上所述,采用平面大地假设,即忽略地球转速时会给低速自旋高超声速炮弹的射程、弹道高以及侧偏带来10m以上的误差,使命中精度大大降低,若考虑在高超声速炮弹上加入制导控制系统时会增加其工作负担,给炮弹完成相应的战斗技术指标增加了困难,因此地球转速不能忽略;而采用球形大地假设或椭圆大地假设均能在误差范围内模拟出高超声速炮弹的弹道特性,产生的弹道误差完全可以通过在弹上加入控制系统而消除掉,即地球扁率对低速自旋高超声速炮弹弹道特性的影响可忽略不计。
5 结论
本文根据尾翼式自旋高超声速炮弹的飞行特点,考虑地球转速、飞行高度及气动力的变化,建立了其适配的6-D运动方程和自由扰动运动方程,并基于已有的弹型进行了稳定性分析和弹道仿真分析,可为高超声速制导炮弹的总体设计提供参考。所得结论如下:
1) 对自由扰动运动方程进行了仿真求解后,所得特征根的实部小于零,说明低速自旋高超声速炮弹能够在飞行过程中具有良好的动态稳定性。
2) 尾翼式自旋高超声速炮弹的射程随射角的增大而先增大后减小,弹道高随射角的增大而增大。在椭圆大地假设下,该弹在发射速度=2 500 m/s时的最大射程角=50°,最大射程达457.2 km,弹道高度137.9 km。
3) 纵向散布在平衡转速=18.8 r·s时最小,但为了适配安装控制系统时舵机的操控能力,减小马格努斯力矩,增大落点动能、提高毁伤效力,设计时选择平衡转速=8.7 r·s的极小值点。
4) 忽略地球转速时会产生10m以上的弹道误差,对落点位置影响较大,若加入控制系统会极大增加工作负担;扁率对自旋高超声速炮弹弹道特性影响的量级仅在10m,可通过加入弹上控制系统消除,可忽略不计。
猜你喜欢
弹道学报(2022年3期)2022-10-08
兵器知识(2021年11期)2021-11-27
名车志(2020年10期)2020-10-27
名车志(2020年10期)2020-10-27
兵器知识(2020年8期)2020-08-12
军事文摘(2020年8期)2020-08-12
兵器知识(2020年5期)2020-05-25
百科探秘·航空航天(2020年4期)2020-04-24
航空知识(2018年7期)2018-06-20
IT经理世界(2016年21期)2016-12-05