基于激光器调制的微光栅加速度计噪声抑制
2022-11-01 11:45郑翔,杨波
兵器装备工程学报 2022年10期
郑 翔,杨 波
(东南大学 仪器科学与工程学院, 南京 210096)
1 引言
加速度计在惯性导航系统、生物医学领域、军事领域和日常生活中起着重要作用,例如检测呼吸频率、测量地球表面和重力场的分布。基于传统方法的加速度计具有灵敏度低、可靠性差、信号处理复杂等问题。对线加速度计而言,由于系统在稳态条件下加速度与位移成正比关系,因此可以通过高精度的测量位移来准确地计算出加速度。在文献[10]中已经证明了基于微光栅的位移传感器具有纳米级的位移分辨率。因此,与传统加速度计相比,基于微光栅的光学加速度计能够实现较高的分辨率和灵敏度。此外,由于具有体积小、质量轻的优点,将MEMS技术与光学加速度计相结合的MOEMS加速度计具有重大意义。微光栅加速度计的弱光信号易受各种噪声和光学参数不确定性的影响,这无疑对实现高精度的检测带来了挑战。近20年来,人们对于微光栅加速度计信号检测方案进行了大量的研究。为了提高信噪比,文献[12]提出了一种相位调制技术,通过调制光栅与质量块之间的距离,将检测到的弱光信号经锁相放大后进行解调处理。为了抑制背景噪声和光源波动的影响,文献[13]中提出了一种差分检测电路用以提高检测灵敏度,其特点是设计的光路装置能够同时检测0级和1级光斑。对于这种微光机电系统,噪声主要来自于环境光干扰、机械热噪声和1/噪声。为了使有用信号在低频段获得出色的信噪比,采用了强度调制技术用以抑制1噪声。相比较于相位调制,强度调制的载波频率不受机械结构的带宽限制,可以将有用信号调制到较高频段,达到抑制1噪声的目的。本文中主要研究了基于半导体激光器调制技术的信号检测电路,用以抑制环境光噪声和1噪声。
2 微光栅加速度传感器基本原理
如图1所示,微光栅加速度传感器结构包括硅微敏感结构以及在玻璃衬底上的微光栅结构。
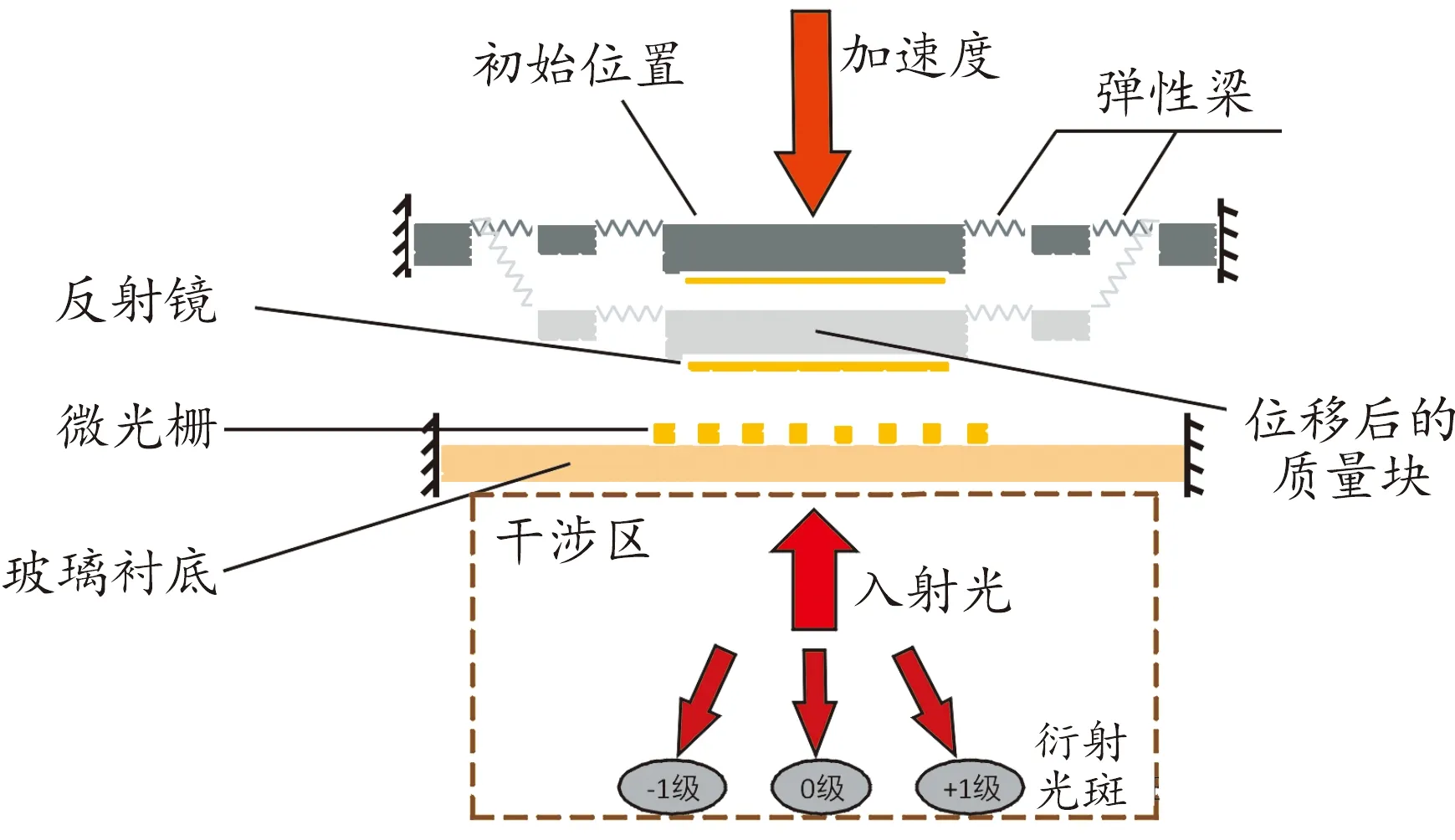
图1 微光栅加速度传感器结构示意图Fig.1 Schematic diagram of the structure of the micro-grating acceleration sensor
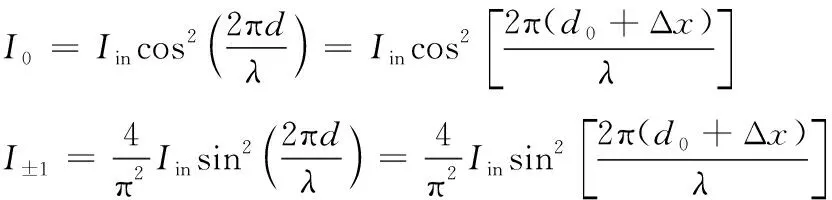
入射相干激光束以0.5的占空比在透射光栅的表面上衍射。一部分光被直接反射并用作衍射光束1;另一部分到达与质量块相连的反射镜,然后反射回光栅并成为衍射光束2。于是在光栅的下方两类衍射光形成干涉,在不同的衍射角具有不同的光强大小,会形成0级、±1级等光强极大点,这些光斑光强呈正弦变化,相位与腔长(反射镜到微光栅之间的距离)相关,因此当对质量块施加加速度时,腔长会相应地发生变化,从而实现加速度的测量。根据标量衍射理论,0级、±1级光斑的函数表达式:
(1)
式中:表示入射光强的幅度;为初始腔长; Δ为质量块的位移变化量;为激光器的中心波长。
图1所示的硅微敏感结构从动力学原理可以看成经典的质量-弹簧-阻尼系统。给敏感结构的质量块施加作用力,根据牛顿第二定律,可得微分方程:
″()+′()+()=()
(2)
进行拉氏变换,得微光栅加速度传感器的硅微敏感结构驱动模态数学模型是一个二阶振荡系统,其传递函数为:

(3)
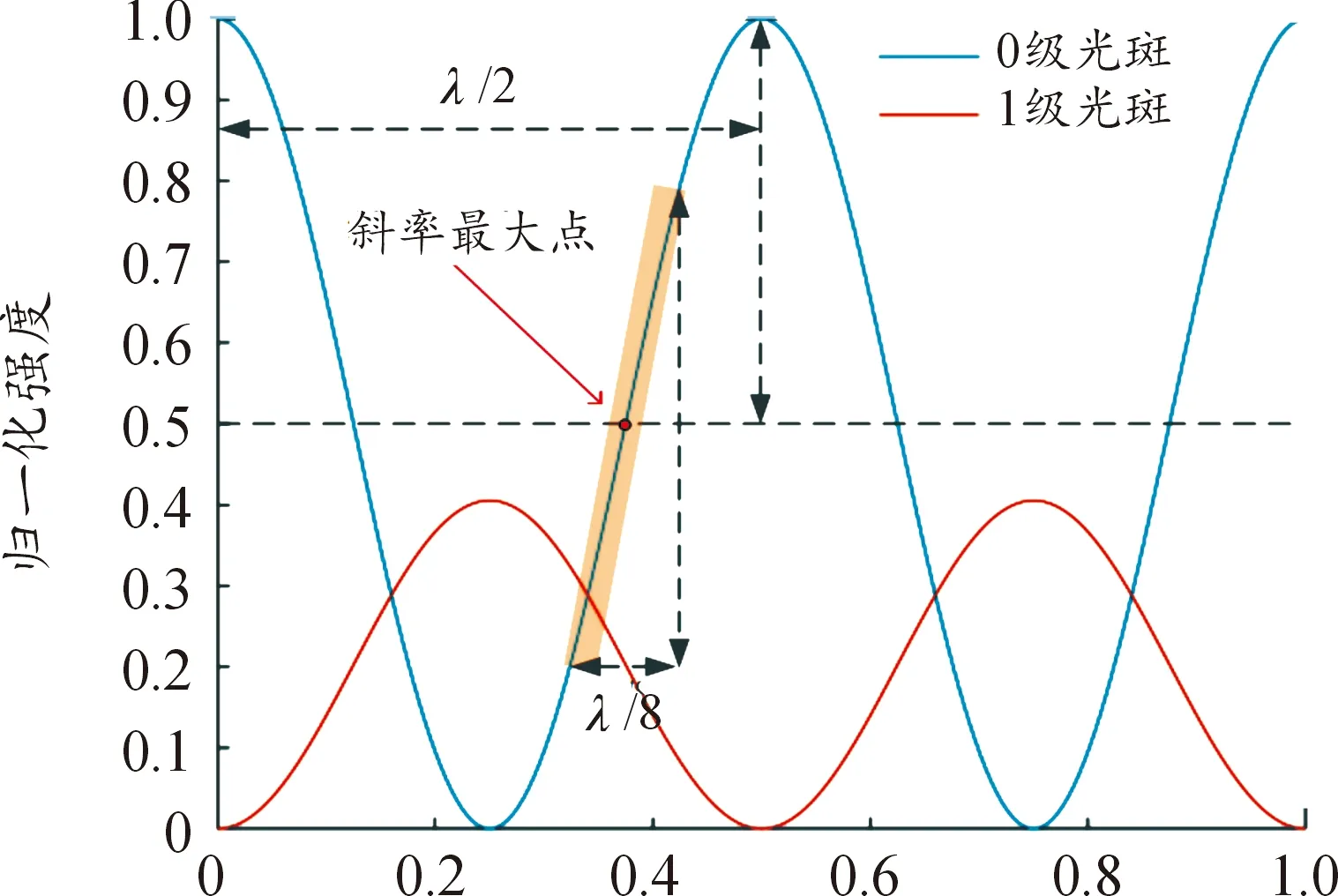
图2 0级与±1级衍射光斑光强与腔长的函数关系曲线Fig.2 The relationship between the intensity of the 0-order and ±1-order diffracted spots as a function of cavity length
为了提高硅微结构的灵敏度,一个通常的做法是增大质量块的质量,但是这会使传感器的测量范围和带宽减小。为了在低频段实现高精度加速度信号测量,有必要采取措施抑制信号中的1/噪声。在这里采用激光器高频调制的方式解决这一问题。
3 激光器调制解调系统分析
如图3所示,本文中所设计的激光器调制信号处理系统主要包括3个部分:
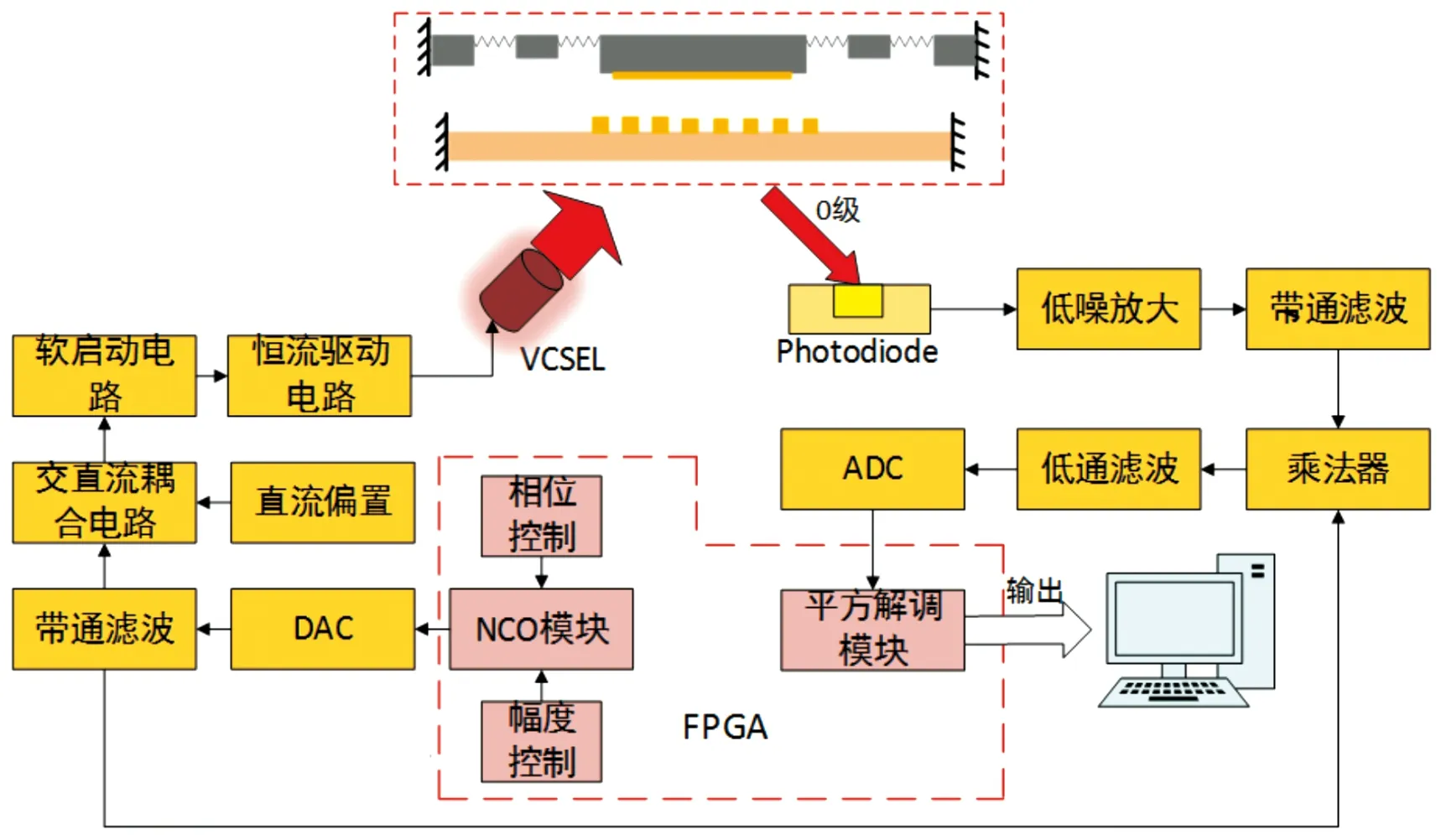
图3 激光器调制信号处理系统框图Fig.3 Block diagram of laser modulation signal processing system
第1部分用于驱动激光器的数模混合电路,其中FPGA提供高频的载波调制信号,直流偏置模块用于确定激光器的静态工作点,两者耦合后的输出作为激光器的激励源。
第2部分包括微光栅、硅微敏感结构和半导体激光器(VCSEL),这部分模块实现了光信号和惯性力的耦合。
第3部分包括光电探测器和数模混合信号处理电路,这部分主要实现了光信号到表征加速度的高信噪比电压信号的转换。
若对质量块施加交流激励并将产生的位移表示为Δ=sin(),其中表示交流激励的幅度,表示交流激励的频率。于是0级光斑的光强表达式:

(4)
其中:表示入射光强的基本分量;表示光源的波动;表示外界杂散光对光电二极管(PD)的低频干扰;表示光源的调制频率;表示调制电流信号的直流分量(>1);为初始腔长;为激光器的中心波长。
0级光斑光强信号由PD转换为电流,转换系数为,PD转换后的电流信号通过前置放大电路转换为电压信号,放大系数为,电压信号记为,其表达式为:
=(+)(cos+)×

(5)
根据贝塞尔公式,式(5)可展开为:

2()cos-2()cos2+…}+=

2()cos-2()cos2+…}+

()[cos(+)+cos(-)]-
()[cos(+2)+
cos(-2)]+…}+
(6)

对作带通滤波后,得到需要的频率分量:

()[cos(+)+cos(-)]}
(7)
如式(7)所示,将得到的与FPGA提供的载波信号相乘后作低通滤波,即将×cos的结果再作低通滤波,可得


(8)
由式(8)可知,此时得到的电压信号经ADC采样后送入FPGA,对离散化后的电压信号作平方解调处理,其解调过程如下:首先,对作数字高通滤波,去除直流分量可得

(9)
再对该信号做平方运算,可得


(10)
由式(10)可知,平方后信号能量分布在直流和二倍频两个频段上。接下来对信号作数字低通滤波后可得其直流分量,最后经过开根号运算后得到表征加速度信息的电压信号,其表达式为:


(11)
综上,通过使用激光器调制技术,将表征加速度的有用信号的能量转移到了高频率段上。显然,当信号所处频段的中心频率趋向于无穷大时,它所包含的1噪声就趋向于无穷小。因此,解调后的信号中1噪声会得到明显抑制。紧接着,将得到的低1噪声的信号转换为数字信号作进一步处理,利用数字电路不易受噪声干扰的特点得到最终表征加速度信息的输出信号。
4 关键硬件电路设计
4.1 激光器驱动电路设计
激光器驱动电路由交直流电压耦合电路和恒流驱动电路组成,如图4所示。
交直流耦合电路中直流输入电压为激光器提供静态工作点,交流输入电压将激光器的光强分量调制到高频段,可以有效抑制环境光噪声。
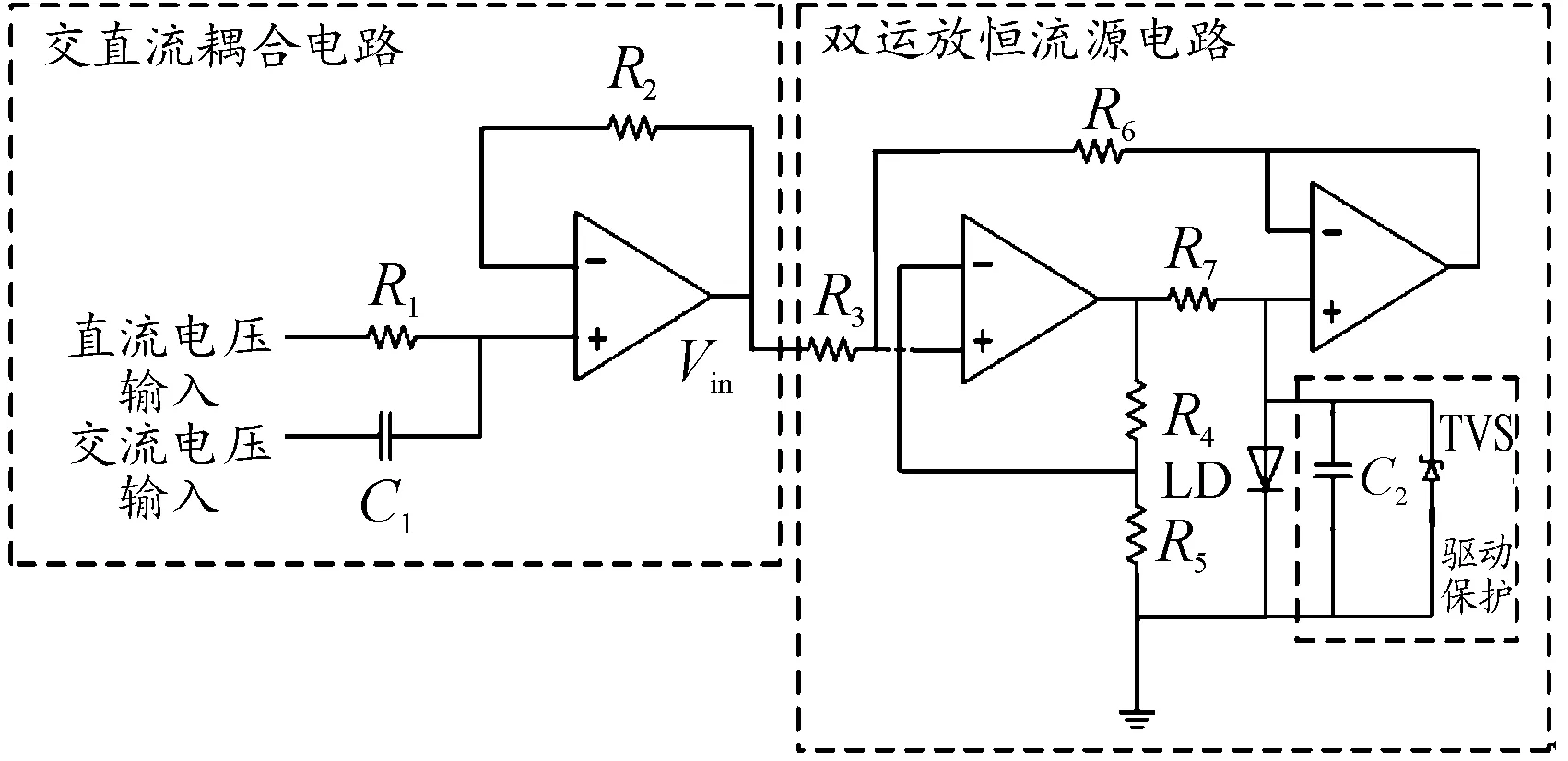
图4 激光器驱动电路图Fig.4 Schematic diagram of laser drive circuit
双运放恒流驱动电路用于将输入电压以一定比例地转换为激光器(LD)的驱动电流,其工作原理:设右端的电压为,左右两端的电压分别为和,在深度负反馈条件下,由运放的虚短和虚断特性可得

(12)
(13)
联立式(12)和式(13)可得两端的电压差为

(14)
出于简化考虑,不妨令===,则式(14)可化简为
-=
(15)
由运放的虚断可知,流过的电流即为激光器的驱动电流,设激光器驱动电流为,于是有
(16)
显然,该恒流源电路的精度主要受、、、电阻的比例关系影响,可以在一定程度上降低单个电阻对电流输出精度的影响。
4.2 低噪放大电路设计
在微弱信号检测中前置放大电路的低噪声设计的好坏决定了整个系统的噪声水平的高低。为了获得最大的信噪比,有必要设计一个精密的光电二极管传感器放大电路。
如图5所示,为与入射光功率成比例的电流源。为光电二极管的暗电流,其大小主要受反向偏置电压影响,反向偏置电压越大,暗电流越大。为光电二极管的结电容,容值从几十pF到几千pF不等,其大小主要受反向偏置电压影响,反向偏置电压越大,结电容越小,光电二极管响应速度越快。为分流电阻,通常为,因此光电二极管可近似看作电流源。基于光电二极管的特点,本文中选用飞安输入偏置电流静电计放大器ADA4530-1作为低噪放大电路的运放单元,它具有极低的偏置电流(fA级),满足设计的要求。
考虑到光电二极管会在电路中引入输入电容,从传递函数的角度考虑,这会给系统引入一个零点,可能导致系统不稳定,因此在运放的反馈端加上电容作为补偿。从闭环传递函数的角度看,引入即引入了一个极点,可以实现零极点的抵消,并且能够降低低噪放大电路的带宽,避免引入更多的噪声,使整个系统更加稳定。如图6所示,二极管P端与N端分别与运放的同相和反相端相接,利用运放的虚短特性,光电二极管的偏置电压尽可能小,从而降低了二极管暗电流对目标信号的影响。
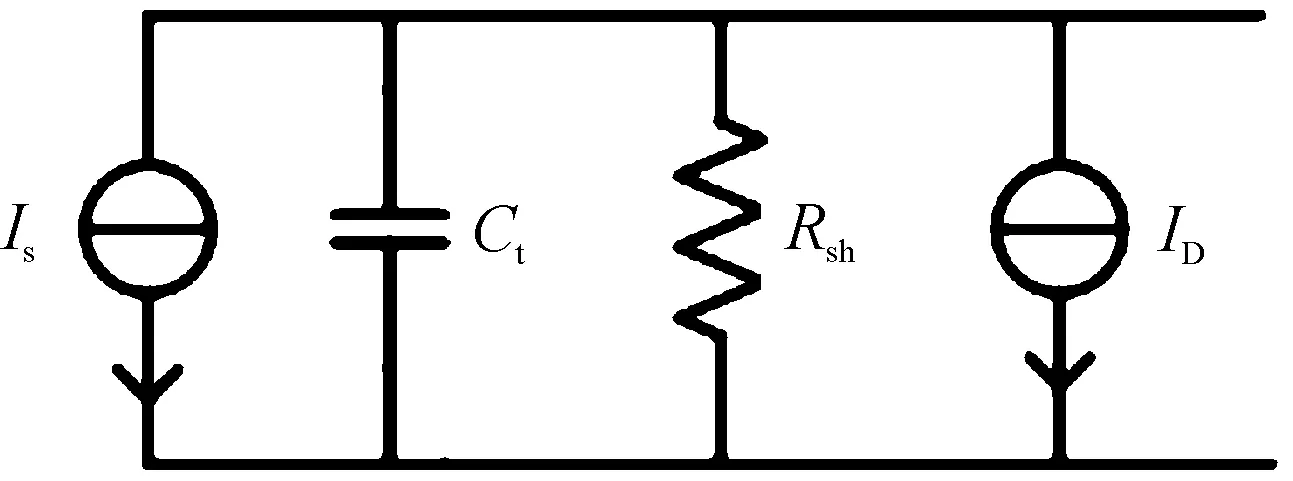
图5 光电二极管等效电路图Fig.5 Photodiode equivalent circuit model
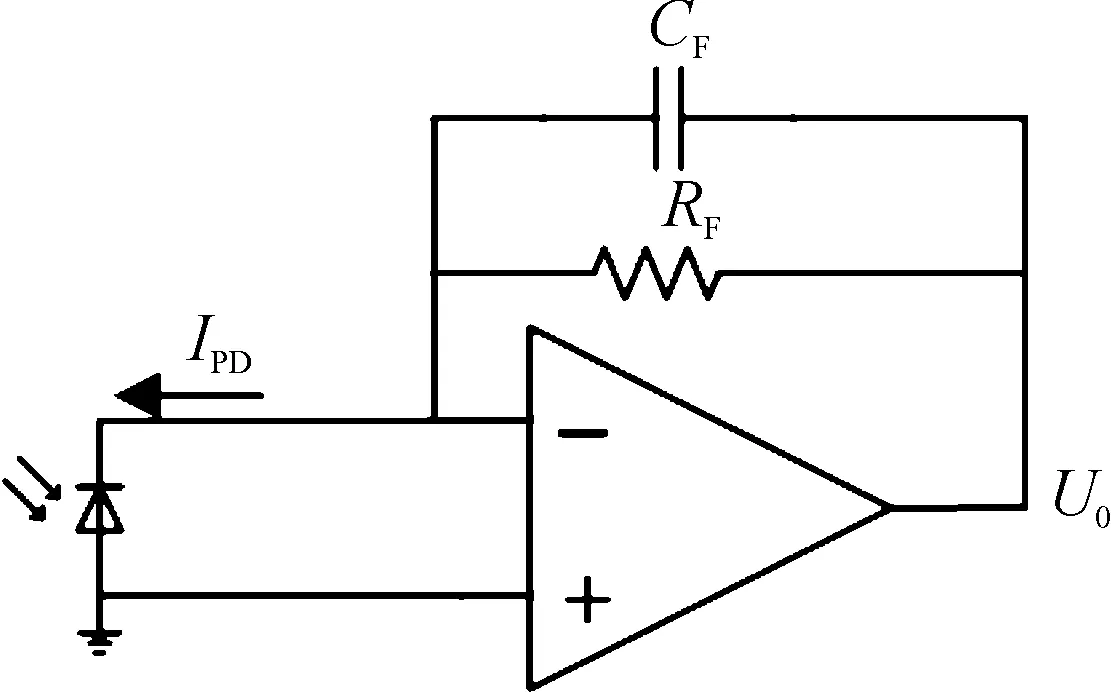
图6 低噪放大电路图Fig.6 Schematic diagram of low-noise amplifier circuit
低频段忽略电容C的影响,于是有
=×
(17)
4.3 数字电路设计
本文中采用型号为 EP3C25E FPGA芯片作为数字电路的实现平台。数字电路主要包含平方解调模块和数字信号发生器模块(NCO),前者用于信号采样后的数字式幅度解调,后者用于给激光器提供高频载波调制信号。
如图7所示,平方解调模块主要由数字IIR高通滤波器、乘法器、开根运算模块和数字IIR低通滤波器组成。其中,乘法器和开根运算模块均通过调用IP核实现,在保证性能的同时加速开发;滤波器采用的是二阶IIR滤波器结构,与FIR相比,IIR在相同阶数下拥有更出色的幅频特性,符合本系统的需要。
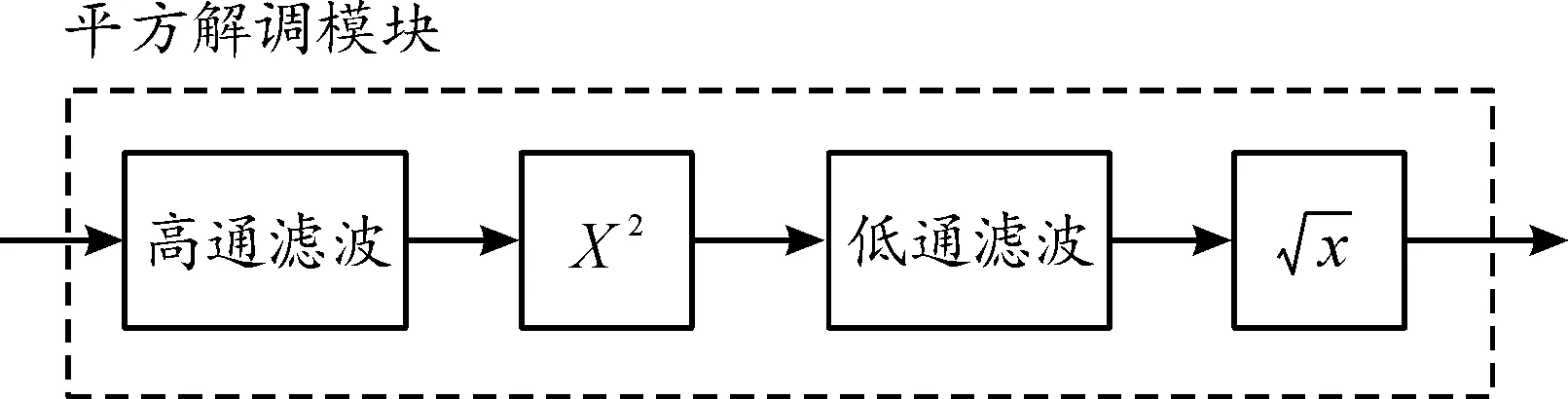
图7 平方解调模块框图Fig.7 Block diagram of square demodulation
如图8所示,数字信号发生器模块采用Cordic算法。该算法在资源允许的条件下可以方便地通过增加迭代次数来提高载波信号的精度,再结合FPGA可重复编程的特点,电路可以快速地被调整并获得适应系统的载波信号源。
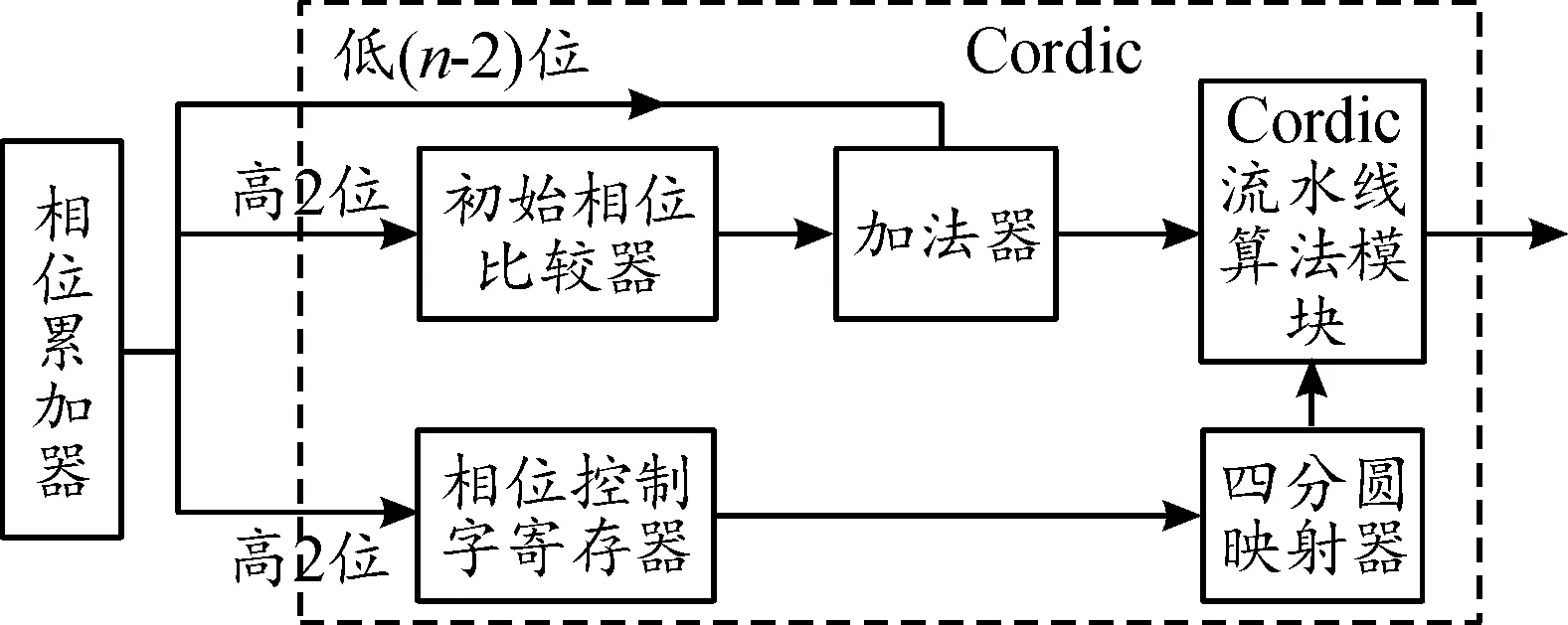
图8 数字信号发生器模块框图Fig.8 Block diagram of the digital signal generator
5 实验结果
本次微光栅加速度计噪声抑制实验进行了如图9所示的实验过程。集成式微光栅加速度计装置包含微光栅及硅微敏感结构、激光器及其驱动电路和PD及其检测电路3部分,它们都被集成在30 mm×27 mm×50 mm的长方体壳内,如图10所示。集成式微光栅加速度计装置、商用加速度计和压电片被安装在定制的支架上,并通过支架固定在隔振台上。用外部的信号发生器和功率放大器对压电片施加交流电压激励信号,由于逆压电效应,压电片就会带动整个结构产生微位移振动。此外,利用动态信号分析仪观察输出信号的频谱。在此基础上,进行了以下实验。
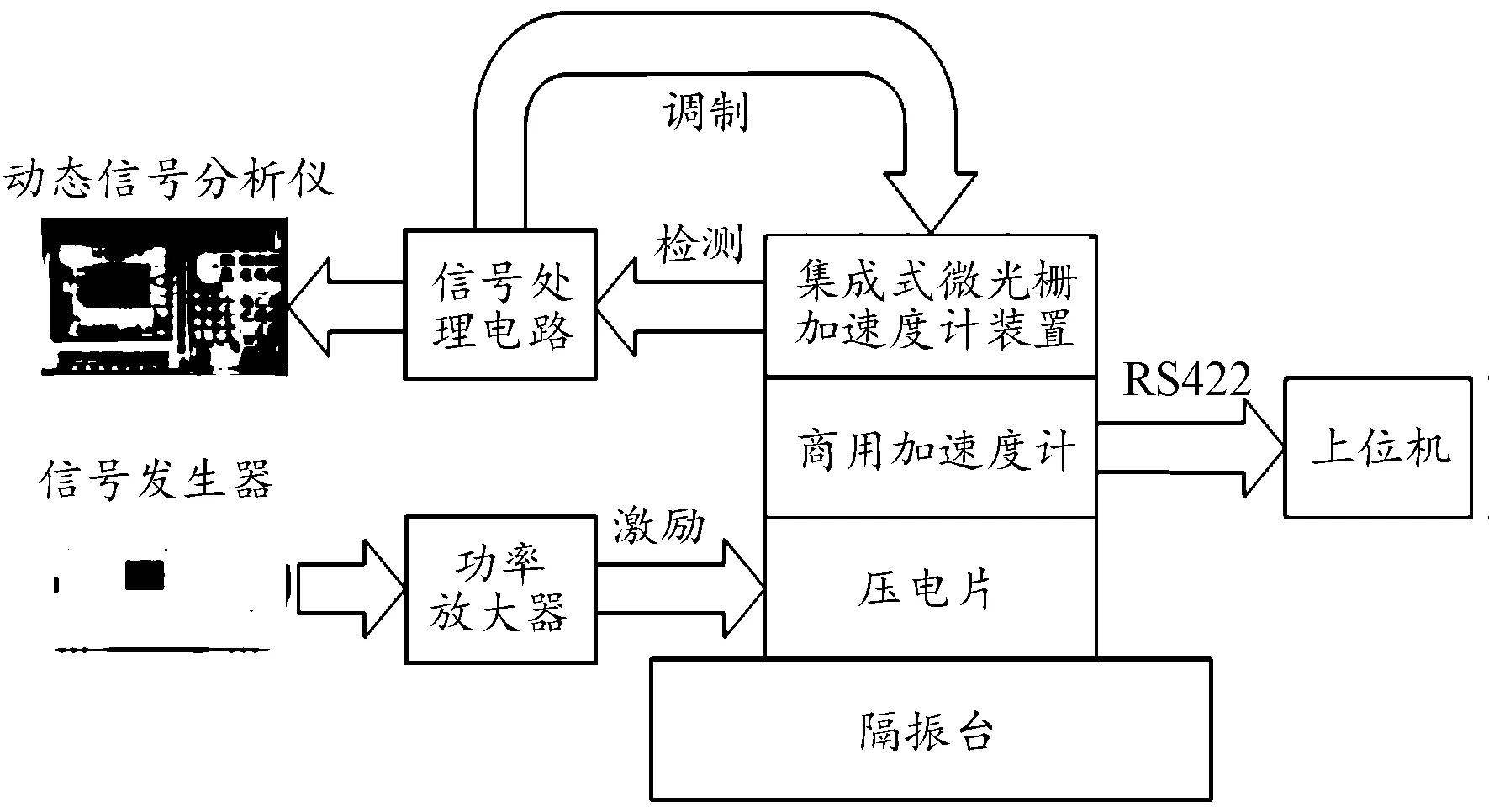
图9 微光栅加速度计噪声抑制实验过程示意图Fig.9 Schematic diagram of the structure of the micro-grating accelerometer noise suppression experimental device
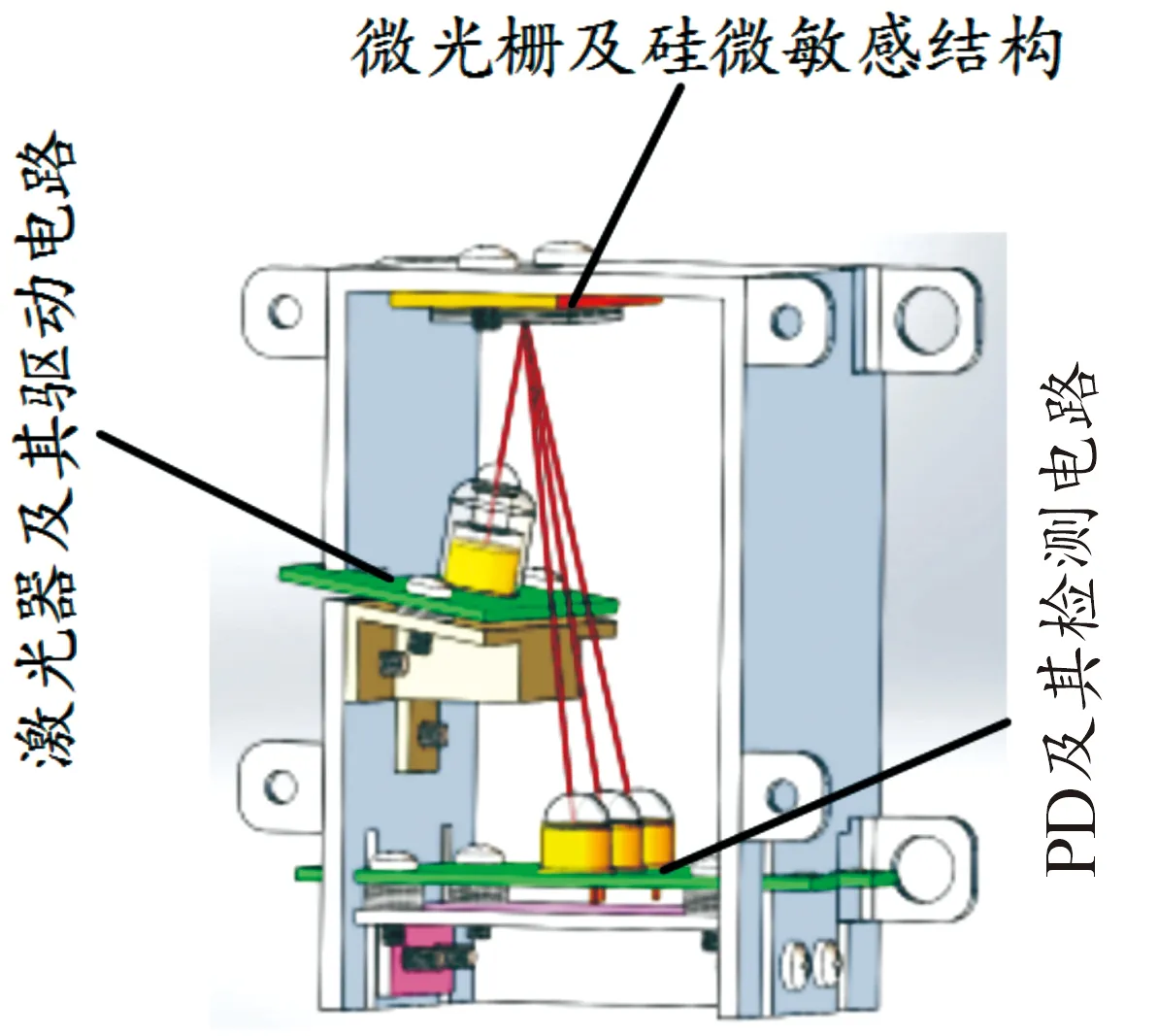
图10 集成式微光栅加速度计装置示意图Fig.10 Schematic diagram of the integrated micro-grating accelerometer device
5.1 标度因数测试
实验数据如图11所示。由图2可知,每段线性区间的长度约为一个周期长度的1/8,因此在图11(a)中以斜率最大点为起点取出一个周期区间的1/8作为线性区间,并在图11(b)中对所取区间[5.9 mg,6.8 mg]内的数据点进行线性拟合。最后,利用最小二乘法拟合得:在线性区域内微光栅加速度传感器的标度因数为104 V/g;拟合后曲线的线性相关系数为0.997,表明加速度计在线性区内线性度好。

图11 输出电压标度因数Fig.11 Scale factor
5.2 传感器噪声分析
器件噪声是对微光栅加速度传感器进行性能和噪声评价的一种重要指标。在实验环境下,分别测试了微光栅加速度计关键信号在开环下直接输出和在经过强度调制解调后输出的噪声谱(功率谱)密度,如图12所示。
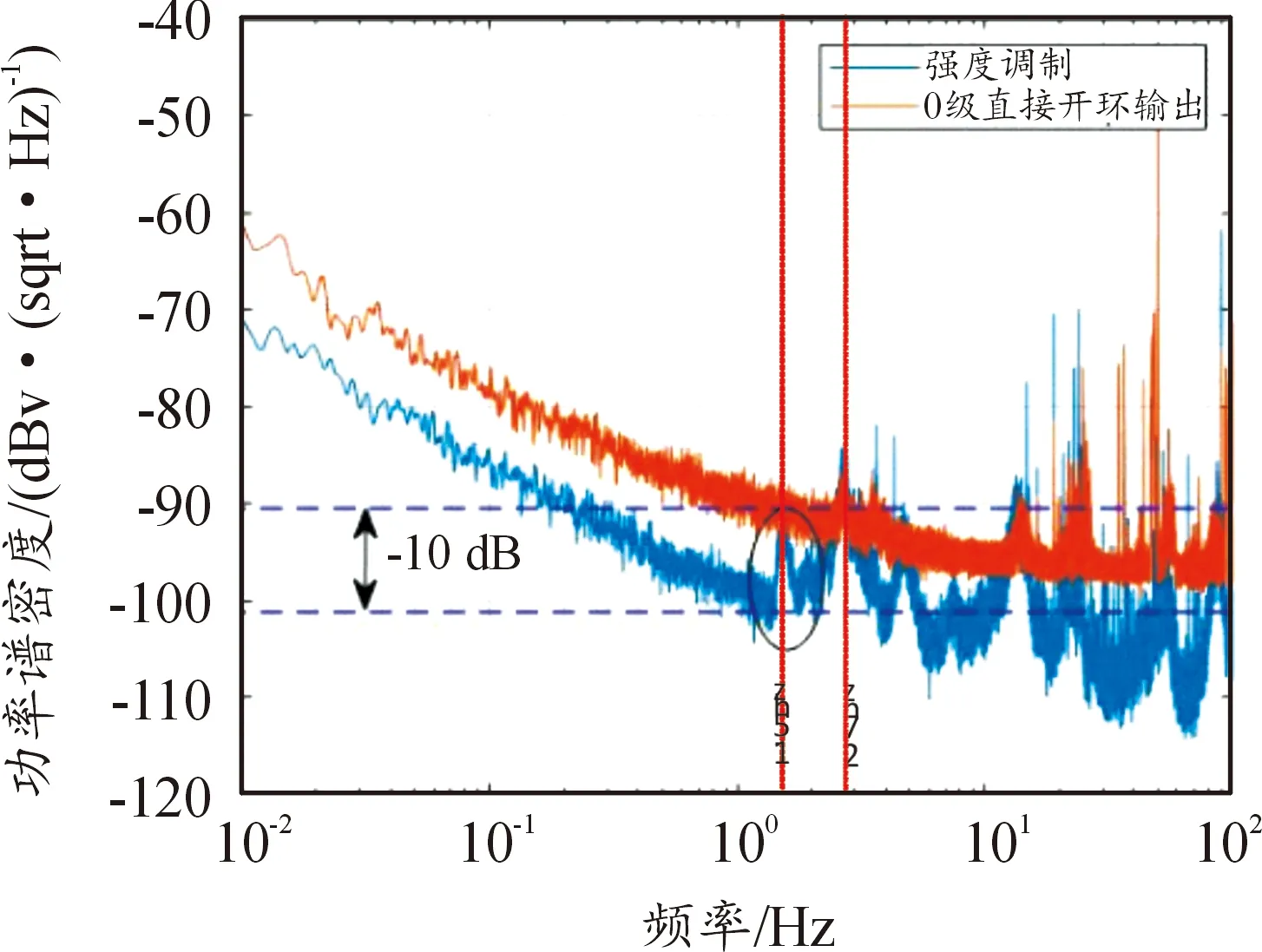
图12 微光栅加速度计关键信号的功率谱密度曲线Fig.12 The power spectral density of the key signal of the micro-grating accelerometer
显然,与直接开环输出相比,采用强度调制后的开环输出的信噪比提高了10 dB,1/噪声得到了明显抑制,符合预期。如图10所示,在实验室环境下,调制后系统分别捕获了位于1.5 Hz和2.7 Hz处的峰值,它们都是当前环境下地球颤动噪声的典型频率,这也进一步地证明了加速度计的测量极限得到了明显提升。
实验结果表明:该光学加速度计在线性区域提供了104 V/g的加速度灵敏度并且系统的本底噪声相较于直接开环输出下降了10 dB。本信号处理系统能够完成对微光栅加速度传感器的信号检测,实现预定功能。
6 结论
1) 设计并实现了基于微光栅加速度计的强度调制解调系统,并给出了理论系统分析和验证。
2) 实验结果表明,该光学加速度计在线性区域提供了104 V/g的加速度灵敏度且系统的本底噪声相较于直接开环输出下降了10 dB。
3) 为了使加速度计灵敏度始终保持在线性区域,未来将采用反馈闭环方案,提高其线性度和动态范围。
4) 采用垂直腔面发射激光器(VCSEL)作为光源,在同一芯片上制作PD,可以进一步缩小加速度计体积。
5) 从仿真结果可以看出传感器受温度的影响较大,后续优化可增加温控系统,提高加速度计稳定性。
猜你喜欢
现代电子技术(2022年9期)2022-05-12
科技视界(2020年8期)2020-05-18
智能计算机与应用(2018年2期)2018-05-23
东方教育(2016年22期)2017-04-07
科技视界(2016年20期)2016-09-29
科学与财富(2016年7期)2016-03-25
湖南大学学报·自然科学版(2014年3期)2014-12-30
计算技术与自动化(2014年1期)2014-12-12
微型计算机·Geek(2009年3期)2009-12-11