基于改进型复合算法的铝空气燃料电池MPPT研究
2022-11-01 11:45岳应娟蔡艳平何美莹
兵器装备工程学报 2022年10期
凤 林,岳应娟,蔡艳平,王 旭,何美莹
(火箭军工程大学, 西安 710025)
1 引言
随着能源危机与环境污染的日益加剧,发展可再生清洁能源已成为世界各国的研究热点。金属燃料电池以其资源丰富、生产成本低、容易储存、安全环保等优点,获得了科学家们的广泛关注。其中铝空气燃料电池以铝为负极、空气中免费的氧气为正极,以常见的氢氧化钾或氢氧化钠为电解质,铝和空气中的氧气发生氧化还原反应产生电能。铝空气燃料电池以其铝资源丰富低价、能量密度高、无毒无污染、安全可回收性好等优点,在新能源、应急电源和备用电源等领域具有广阔的发展前景。然而铝空气燃料电池的输出功率受电解液浓度、温度、流速、空气量和铝电极纯度等因素影响呈非线性变化,且存在能量转换效率低的缺点,需要采用适当的控制方法对其进行MPPT,提高铝空气燃料电池的放电能力和放电效率,实现在不同的工作条件下仍能保持最大功率的输出,以满足实际工程的电力需求。
近些年来,MPPT技术在光伏发电领域发展得较为深入,其方法主要包括恒定电压法、扰动观察法、电导增量法以及人工智能法,对此大量学者将其方法应用到燃料电池的MPPT中。文献[4]将改进型扰动观察法应用到微生物燃料电池的MPPT中,通过Boost变换器不断调整占空比,实现微生物燃料电池的MPPT,提高了微生物燃料电池的输出功率并减小了功率振荡。文献[5]针对质子交换膜燃料电池的MPPT,提出了一种将粒子群优化和PID控制相结合的策略,仿真结果表明:该策略较好地提高了燃料电池MPP的跟踪速度和精度。文献[6]提出了一种基于模糊规则和粒子群优化的燃料电池组MPPT方法,提高了MPPT的响应速度。文献[7]针对燃料电池电动汽车高效率低成本电池充电器的设计需求,提出了一种新型的自调谐2型模糊MPPT控制器,该控制器可以实现在复杂变化条件下燃料电池的MPPT,同时提出了一种改进型入侵杂草优化算法,提高了控制器的输出效率。但是该控制方法复杂,硬件要求高,在实际的工程应用中具有一定的局限性。
以上研究从燃料电池的不同特点出发,提出了不同的MPPT方法,具有一定的实用价值,但在兼顾MPPT的跟踪速度和搜索精度、功率振荡,特别是当工作环境变化时,快速准确地实现MPPT,还需要进一步深入研究。近些年来,以模糊控制技术为代表的智能控制技术,因其在处理复杂非线性系统的突出优势,受到了广大学者的青睐,也成为燃料电池MPPT的研究热点。
在上述研究的基础上,提出结合扰动观察法控制结构简单、收敛速度快和模糊控制法搜索精度高、抑制振荡以及工作环境变化时响应速度快等特点,并对相应的控制算法做出了进一步的改进,提出了基于改进型复合算法的铝空气燃料电池MPPT方法,在分析铝空气燃料电池的输出特性和MPPT工作原理的基础上,最后通过Matlab/Simulink建模仿真及实测平台,验证了该方法在稳态状态和工作环境变化时的控制效果。
2 铝空气燃料电池的输出特性
铝空气燃料电池主要由铝阳极、电解液和空气阴极3部分组成,其工作原理为:铝阳极与电解液中的氢氧根离子发生反应并不断释放出电子,电子经过外部电路及负载到达空气阴极,并与空气阴极中的氧气和水发生还原反应,生成氢氧根离子,随着电子的定向移动生成电流而产生电能。
在铝空气燃料电池的研究中,一般以燃料电池的极化曲线(如图1所示)研究其输出特性。由图1可以看出,铝空气燃料电池的电压与电流以及输出功率与电流都成非线性关系,其中电压与电流的特性曲线可分为3部分,分别为:活化极化区、欧姆极化区和浓差极化区。在活化极化区,铝空气燃料电池以小电流放电,此阶段电池内阻较大,电池端电压出现了陡降;随着输出电流的不断增大,电池越过了活化极化区,进入到欧姆极化区,此阶段特性曲线基本呈线性关系,近似遵循欧姆定律;当电池输出电流增大到接近极限输出电流时,此时进入到浓差极化区,由于浓差极化对电池电压的影响占主导作用,使得电压急速下降,内阻快速增加。
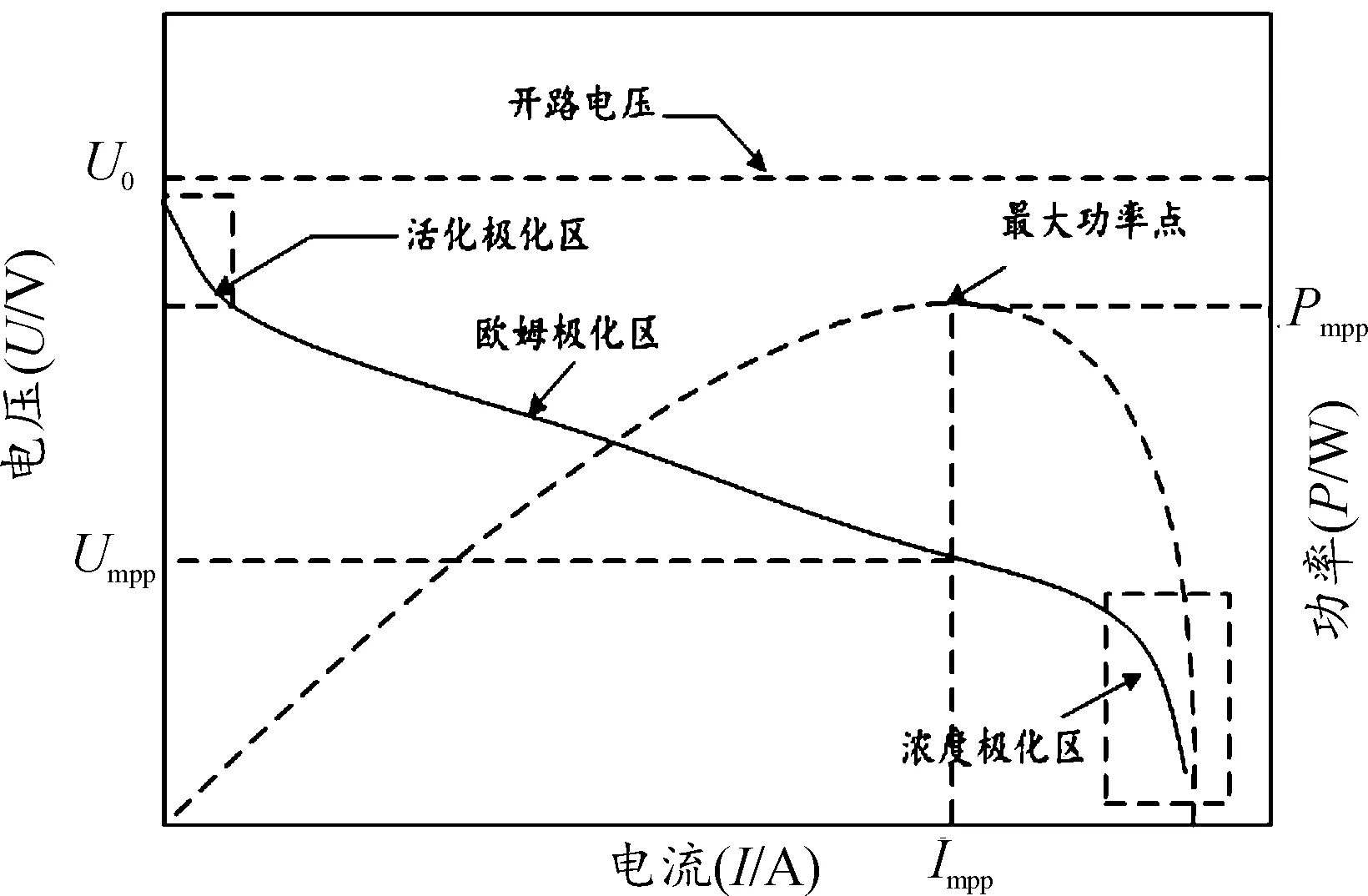
图1 铝空气燃料电池极化曲线Fig.1 Aluminum-air fuel cell polarization curve
通过对铝空气燃料电池极化曲线的分析,铝空气燃料电池的输出电压可表示为
=---
(1)
式(1)中:为热力学电动势;为活化电压降;为欧姆电压降;为浓度差电压降。分析图1中功率与电流的曲线可知,铝空气燃料电池在欧姆极化区存在最大输出功率,最大输出功率点为,当铝空气燃料电池工作在MPP左侧时,系统输出功率随着电池放电电流的增大而增大;当电池工作在MPP右侧时,系统输出功率随着电池放电电流的增大而减小。当电池的工作环境发生变化时,MPP也必然会发生偏移,如果系统不进行最大功率跟踪控制,仍按照变化前的MPP工作,必然会损失部分能量,影响系统的稳定运行,因而研究铝空气燃料电池的MPPT控制方法,使系统在环境条件变化时仍能工作在MPP附近,保证系统稳定高效地输出电能,具有重要的研究意义。
3 铝空气燃料电池MPPT工作原理
3.1 铝空气燃料电池动态模型
铝空气燃料电池在化学反应过程中,存在“双电荷层”现象。这是由于电化学装置内电极上的电子和电解液中离子相互反应,并在外部电压的共同作用下,在电解液和电极的界面之间产生“双电荷层”,类似于电容器,用来存储电荷及能量。当电化学装置的工作环境发生变化时,电化学极化过电压与浓度极化过电压会随之变化,而欧姆极化区的电压会瞬时响应电路的变化。铝空气燃料电池电路的动态模型如图2所示,图中、、分别为活化极化区、浓差极化区以及欧姆极化区的等效电阻,为双电荷层的等效电容,为电化学电动势,、分别为燃料电池的输出电压和电流。
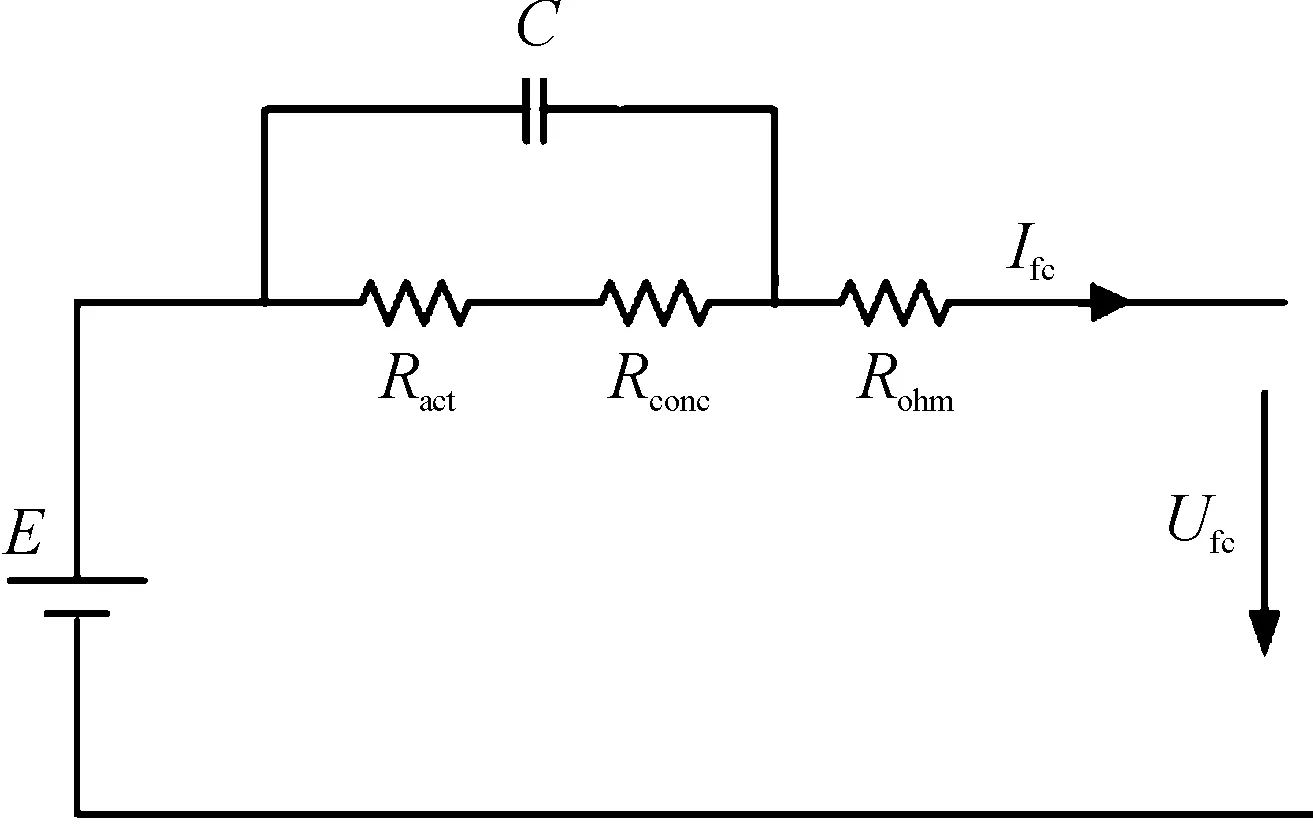
图2 铝空气燃料电池电路的动态模型Fig.2 Dynamic modeling of aluminum-air fuel cell
当铝空气燃料电池工作在不同的阶段时,分别由此阶段的等效电阻、或起主导作用。为了维持系统输出的稳定安全,通常控制铝空气燃料电池工作在欧姆极化区,此时电池内阻为=++,由于此阶段等效电阻起主导作用,且和阻值相当小,因此欧姆极化区的内阻可简化为≈,则铝空气燃料电池的动态模型可简化为直流电压源与内阻的串联电路,其输出电压为
=-
3.2 基于阻抗匹配的铝空气燃料电池MPPT工作原理
为了实现铝空气燃料电池的MPPT,通常在电池和负载之间加入Boost变换器实现电路的控制。Boost变换器也称为升压变换器,其主要功能是通过调节开关管的导通比使输入电压升高到,Boost变换器电路如图3所示。
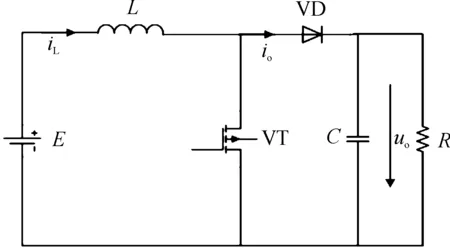
图3 Boost变换器电路Fig.3 Boost converter circuit structure
根据Boost变换器的基本工作原理可知:当电路稳定工作时,在一个时间(=+)周期内,电感获得和释放的能量相等,即
=(-)
可化简为
式中:>1,则输出电压大于电源电压;为升压比,设开关管占空比为=(0<<1),则可通过控制开关管调节占空比大小,进而调节输出电压的大小,则可表示为
(2)
忽略Boost电路中的损耗,根据能量守恒定律可知,电源输出功率等于负载功率,即:
=
结合式(2)可得:
=(1-)
(3)
由式(2)、式(3)可得Boost变换器与外部负载组成的等效可变外阻为
=(1-)
(4)
铝空气燃料电池的输出是非线性的,Boost变换器也是非线性元件,在短时间内可将电路系统视为线性电路,则等效外阻功率为

(5)
式中为等效开路电压,将式(5)对进行求导,可得:
(6)
由式(6)分析可得,当=时,发电系统有最大输出功率,因此铝空气燃料电池MPPT的实质就是实时检测发电系统的工作状态,通过控制电能变换器调节占空比大小,使电池内阻与等效外阻动态匹配,实现发电单元的MPPT。
由以上研究可得铝空气燃料电池电路等效模型,如图4所示。欧姆极化区是铝空气燃料电池的理想工作区域,存在MPP,欧姆极化区内电压与电流近似成线性关系,可通过“两点法”确定直线的斜率,进而得到电池的近似内阻。
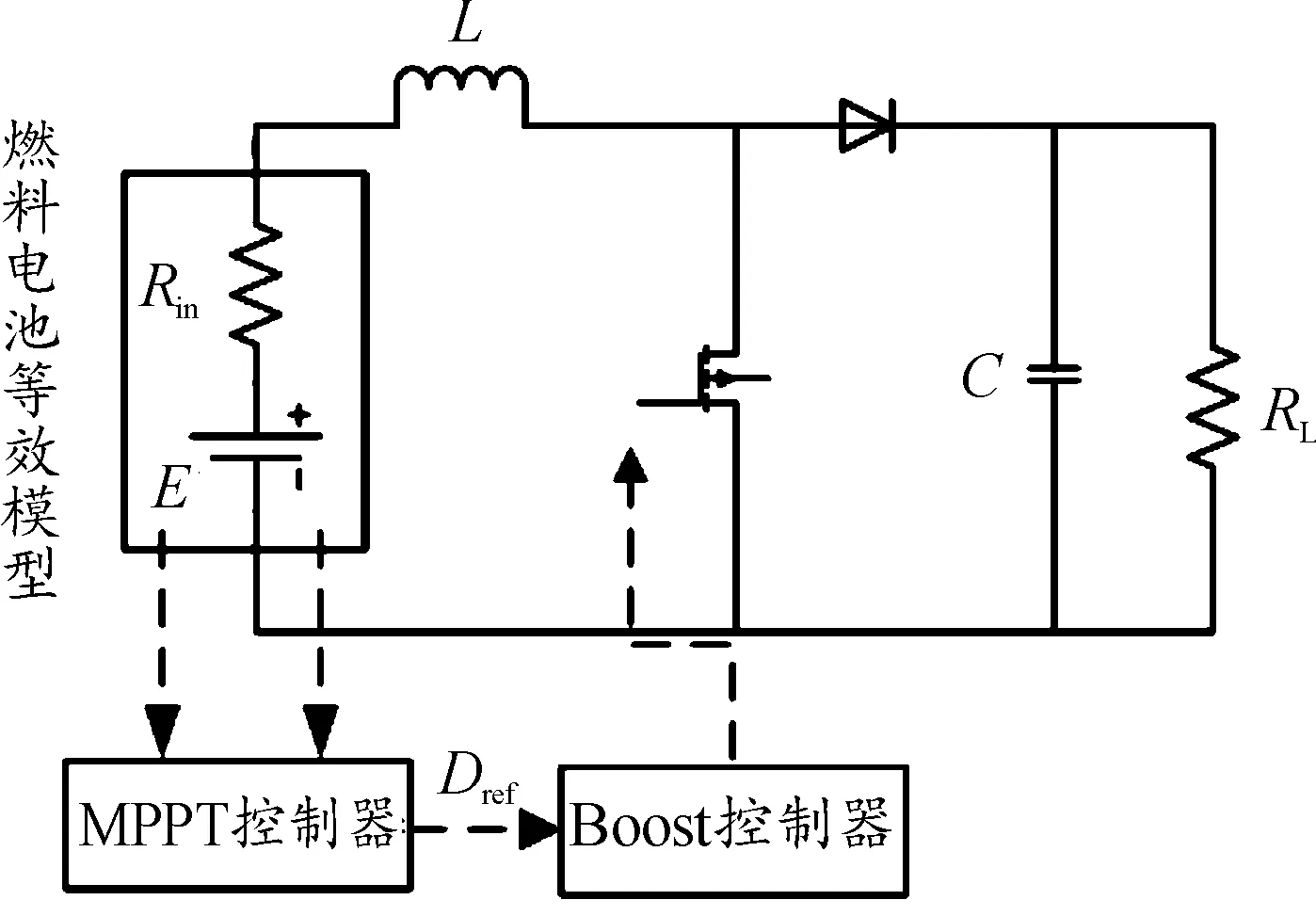
图4 铝空气燃料电池电路等效模型Fig.4 Aluminum-air fuel cell equivalent model
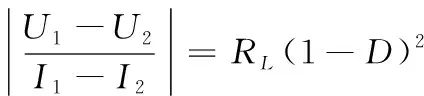
通过Boost变换器控制电路系统工作在不同的、,同时检测其输出电压、,可得到如下表达式:

解得:
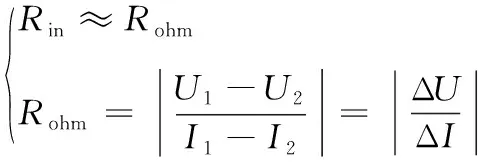
结合式(4),当电池内阻与等效外阻相等时,可得:
ESP师资培养是一项大工程,需要考虑各种运行机制,还需要相关部门政策倾斜。有研究特别指出在培训ESP教师时,要减免老师原有工作量,给予ESP课程老师充足时间进行专业知识学习和积累(蔡基刚,2012)。发展师资的过程不可能一朝一夕完成,教师的培训培养成熟是一个长期的过程,需要各方长期共同努力。
则MPP的参考占空比为

4 基于改进型复合算法的MPPT控制原理
当工作环境发生变化时,铝空气燃料电池的MPP也会发生偏移,传统的扰动观察法不能快速准确地跟踪偏移的MPP,会产生误判问题,同时在MPP附近容易发生振荡,降低铝空气燃料电池的寿命,传统单一的方法很难解决好这些问题。本文提出了一种基于改进型复合算法的铝空气燃料电池MPPT方法,前期以占空比为控制量,以功率变化趋势为扰动增量寻优,在远离MPP时以较大步长快速跟踪,靠近MPP时以较小步长逼近;而后以占空比步长变化量和功率变化量建立隶属度函数,同时在传统模糊控制规则基础上引入权重系数,提升工作环境变化时MPPT效果,提升动态响应速度,提高系统输出的稳定性。
4.1 基于改进型自适应占空比扰动观察法
传统的扰动观察法多以电池的电压或电流为扰动增量,比较扰动前后系统的输出功率,进而确定下一步的扰动方向,若Δ>0,则按照原方向继续扰动;若Δ<0,则反方向扰动,以此周期性扰动,直至找寻到系统的MPP,此类方法对扰动初值和扰动步长要求比较高,容易在MPP附近发生振荡,造成功率损失。因此,本文提出了基于改进型自适应占空比扰动观察法,以占空比为控制量,以功率变化趋势进行调节,自适应调节占空比步长,实现快速准确跟踪MPP。
基于阻抗匹配的铝空气燃料电池MPPT工作原理,结合式(4)可以看出,当负载保持不变时,通过实时调节占空比的大小,使等效外阻与电池内阻动态匹配,进而找寻到MPP。铝空气燃料电池的占空比与输出功率的关系如图5所示,分析可得,当d/d=0时系统输出功率达到最大值,在MPP左侧时,输出功率随着占空比的增大而增大;在MPP右侧时,输出功率随着占空比的增大而减小,因此占空比同样适用扰动观察法的控制参数,以占空比作为控制变量,可简化控制系统,能有效提高跟踪速度。
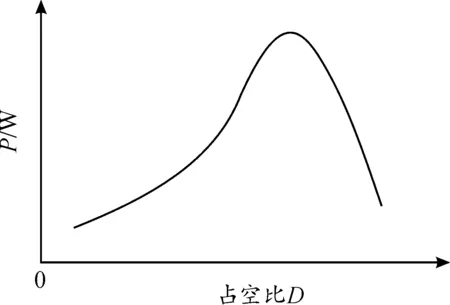
图5 铝空气燃料电池的占空比-输出功率曲线Fig.5 Duty cycle-output power characteristics curve of aluminum-air fuel cell
基于改进型自适应占空比扰动观察法工作原理如下:当Δ=--1>0时,表明此时铝空气燃料电池MPP在右侧;当Δ=--1<0时,表明此时铝空气燃料电池MPP在左侧;当Δ=--1=0时,表明此时铝空气燃料电池工作在MPP。
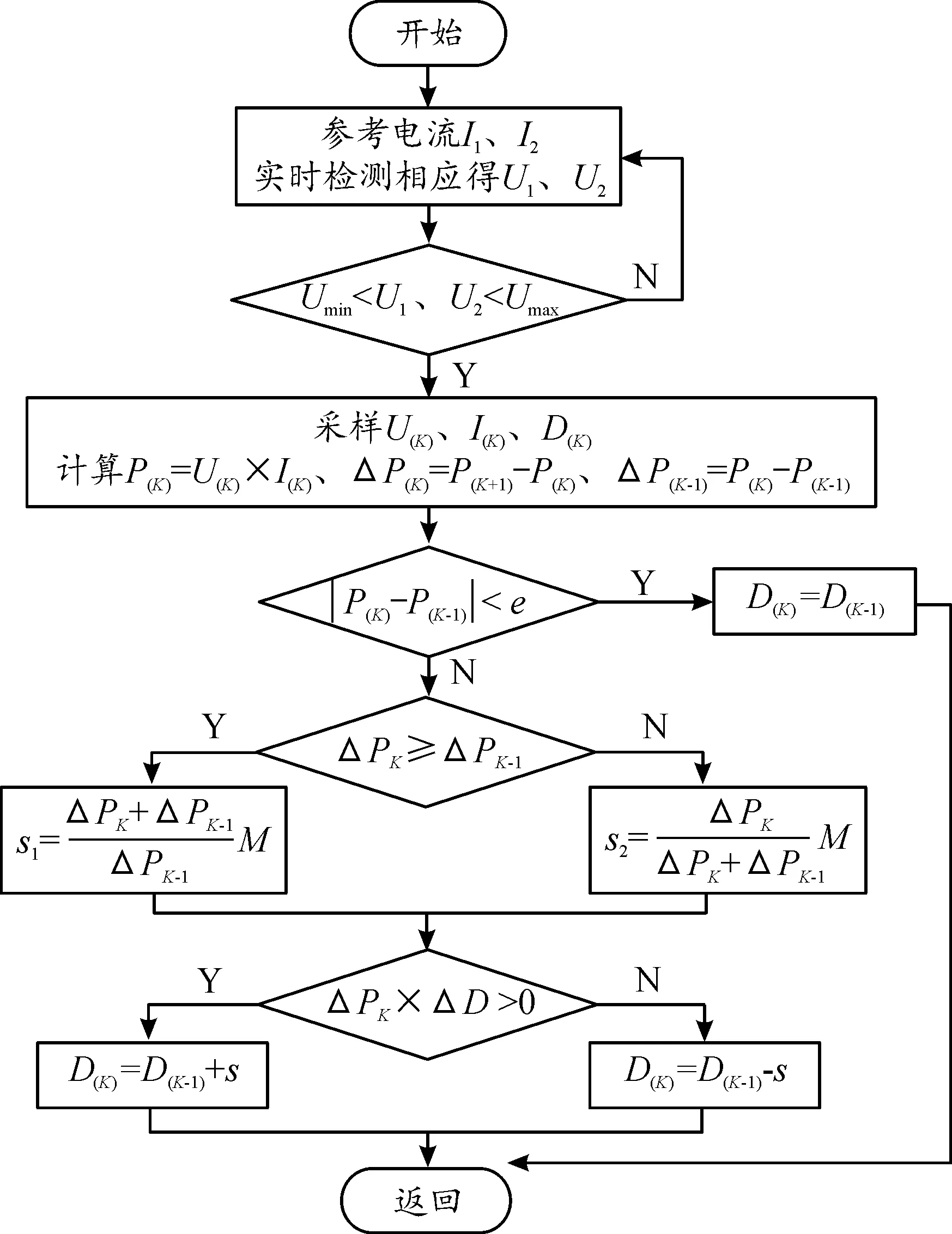
图6 基于改进型自适应占空比扰动观察法流程框图Fig.6 Flow chart based on improved adaptive duty cycle perturbation observation method
4.2 基于模糊控制法
模糊控制法在处理不确定性系统及非线性复杂模型具有独特的优势,很适合铝空气燃料电池非线性系统的研究,当基于改进型扰动观察法以自适应变步长快速跟踪到系统最大功率阈值附近时,而后采用模糊控制法精准地找寻铝空气燃料电池的MPP,基于2种方法的复合,可以很好地兼顾跟踪速度和搜索精度,同时也可以很好地解决工作环境变化时,跟踪新的MPP响应速度慢、精度低等问题。
模糊控制器采用双输入单输出的模型,以铝空气燃料电池的输出功率变化量Δ()及前一时刻的占空比步长变化量Δ(-1)为输入量,输出量为当前时刻的占空比步长()。定义功率变化量Δ()为5个模糊子集:NB(负大)、NS(负小)、ZZ(零)、PS(正小)、PB(正大),其模糊论域范围为[-5,5];占空比步长变化量Δ(-1)为3个模糊子集:N (负)、Z(零)、P(正),其模糊论域范围为[-4,4];输出的当前时刻占空比步长()为7个模糊子集:NB、NM、NS、ZZ、PS、PM、PB,其模糊论域范围为[-4,4]。为了提高控制算法运算速度,简化计算,所有的模糊子集都采用三角形隶属函数,如图7所示。由于平衡点附近的功率变化量较小,为了提高系统的控制精度,设置平衡点附近的隶属函数斜率较大。
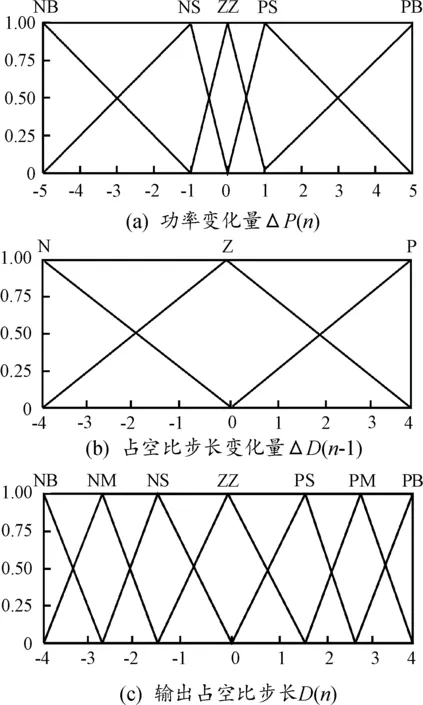
图7 输入、输出的隶属度函数曲线Fig.7 Affiliation function of input and output
模糊控制规则是铝空气燃料电池前一时刻的占空比步长变化使得功率增大,则继续保持此变化方向,反之亦反。考虑工作环境变化对MPP的影响,在模糊控制规则中引入权重系数,以提升模糊控制的动态响应。当常规控制占主导作用时,权重系数设为1.0;当工作环境变化时,权重系数设为0.5;在MPP附近时,权重系数设为0.25,这样可使得整个控制过程变得更加平滑,模糊控制规则如表1所示。
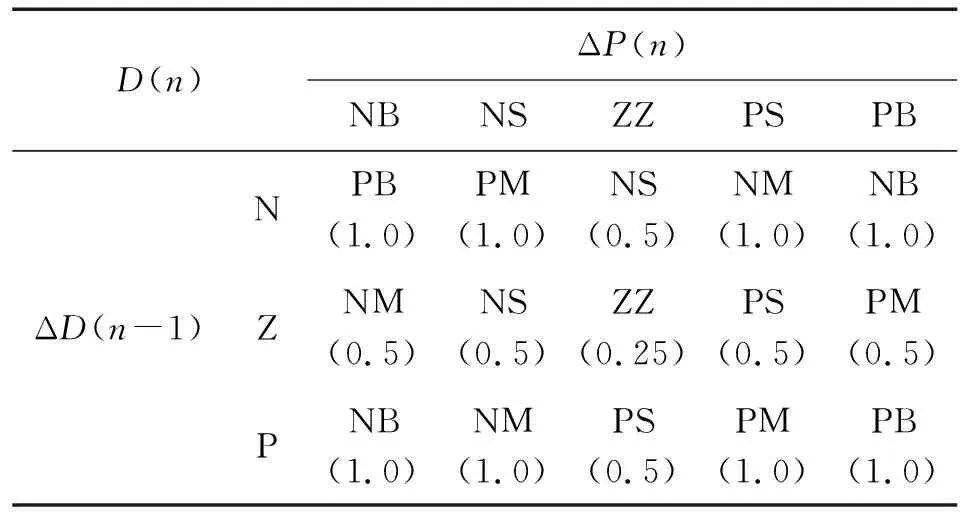
表1 模糊控制规则Table 1 Fuzzy control rules
5 仿真及实测验证
5.1 仿真阶段
为了验证所提方法的可行性和有效性,在Matlab/Simulink中构建铝空气燃料电池发电系统的仿真模型,通过设置仿真参数,实现在稳定状态、内阻和外阻变化时的MPPT仿真实验,并与传统的扰动观察法作以对比。其中Boost升压变换器的参数为:=10 mh,=0.004 F,燃料电池内阻=4 Ω,外阻=10 Ω,开关频率为10 kHz。在稳定状态下传统扰动观察法和基于改进型复合算法铝空气燃料电池MPPT仿真结果如图8所示,可以看出,依据传统扰动观察法,系统输出的最大功率约为40 W,从初始状态跟踪到MPP时间约为0.11 s,且在MPP附近存在较大的功率振荡,容易造成系统的功率损失;而改进型复合算法从初始状态跟踪到MPP时间约为0.015 s,输出功率平稳且没有发生振荡,很好地抑制了MPP附近的功率振荡。对比可以看出,在稳定状态下,改进型复合算法跟踪速度快,输出功率稳定。
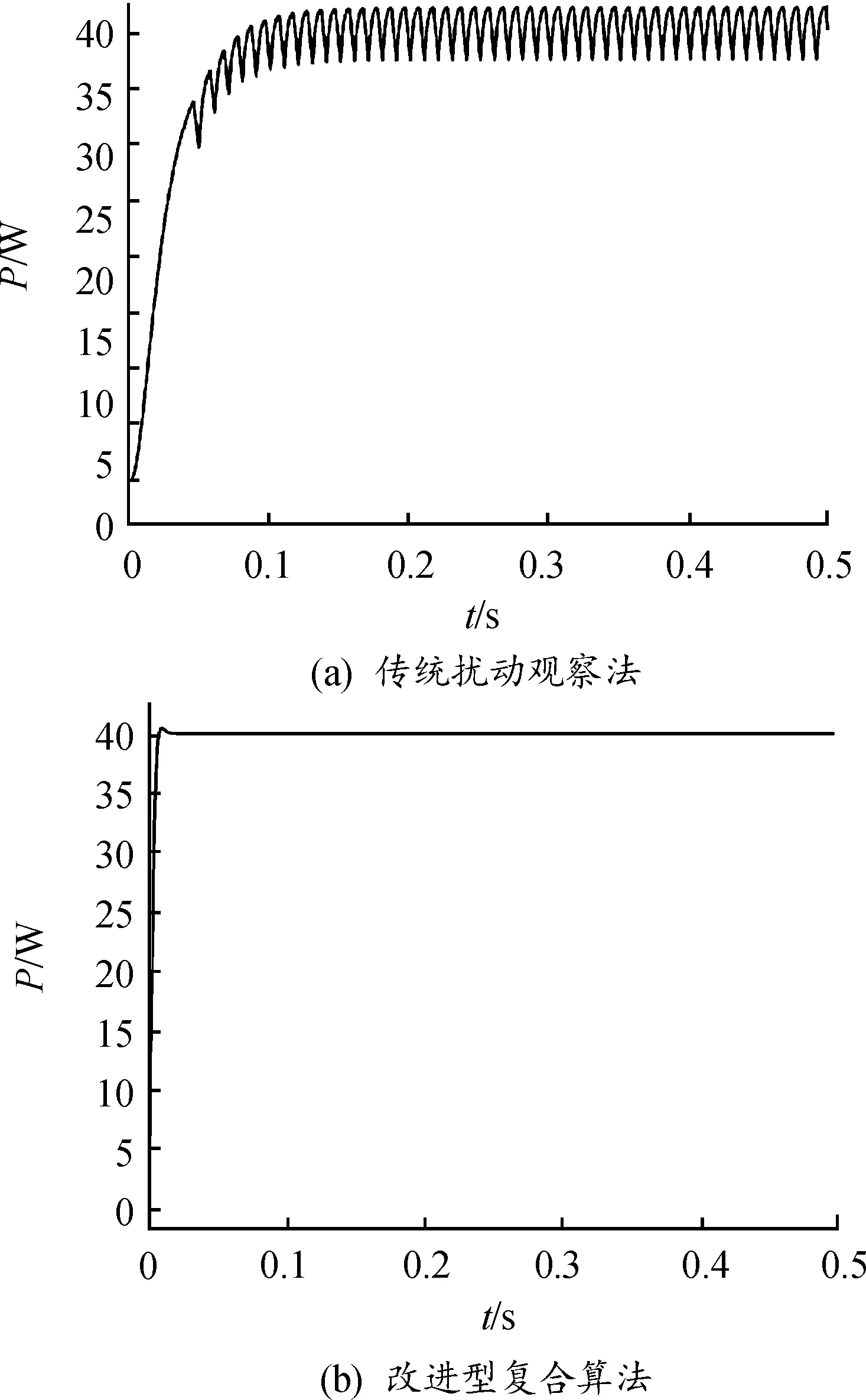
图8 稳定状态下最大功率跟踪仿真曲线Fig.8 Maximum power tracking at steady state
为了验证外部负载变化时MPPT的工作情况,在仿真过程=0.2 s时使外部负载减小至4 Ω,而内阻保持不变,其结果如图9所示。观察分析可得,当外部负载变化时,系统电路通过Boost变换器实时调节占空比的大小,使等效外阻与内阻动态匹配,迅速跟踪MPP,由于电池内阻不变,输出功率经短时间波动后仍稳定于原输出最大功率值。由图可以看出,在=0.2 s外部负载变化时,传统扰动观察法在发生波动约0.06 s后重新稳定于原输出最大功率值,且功率振荡较大;而改进型复合算法波动时间明显小于传统扰动观察法,波动时间约为0.01 s,且输出功率稳定。
当电路外阻保持不变而电池内阻变化时,在仿真过程=0.2 s时使电池内阻减小至3 Ω,系统输出的MPP由于电池内阻减小而增大,为了实现MPPT,系统电路通过Boost变换器迅速调节占空比的大小,使等效外阻与内阻动态匹配,快速跟踪新的MPP,其仿真结果如图10所示。
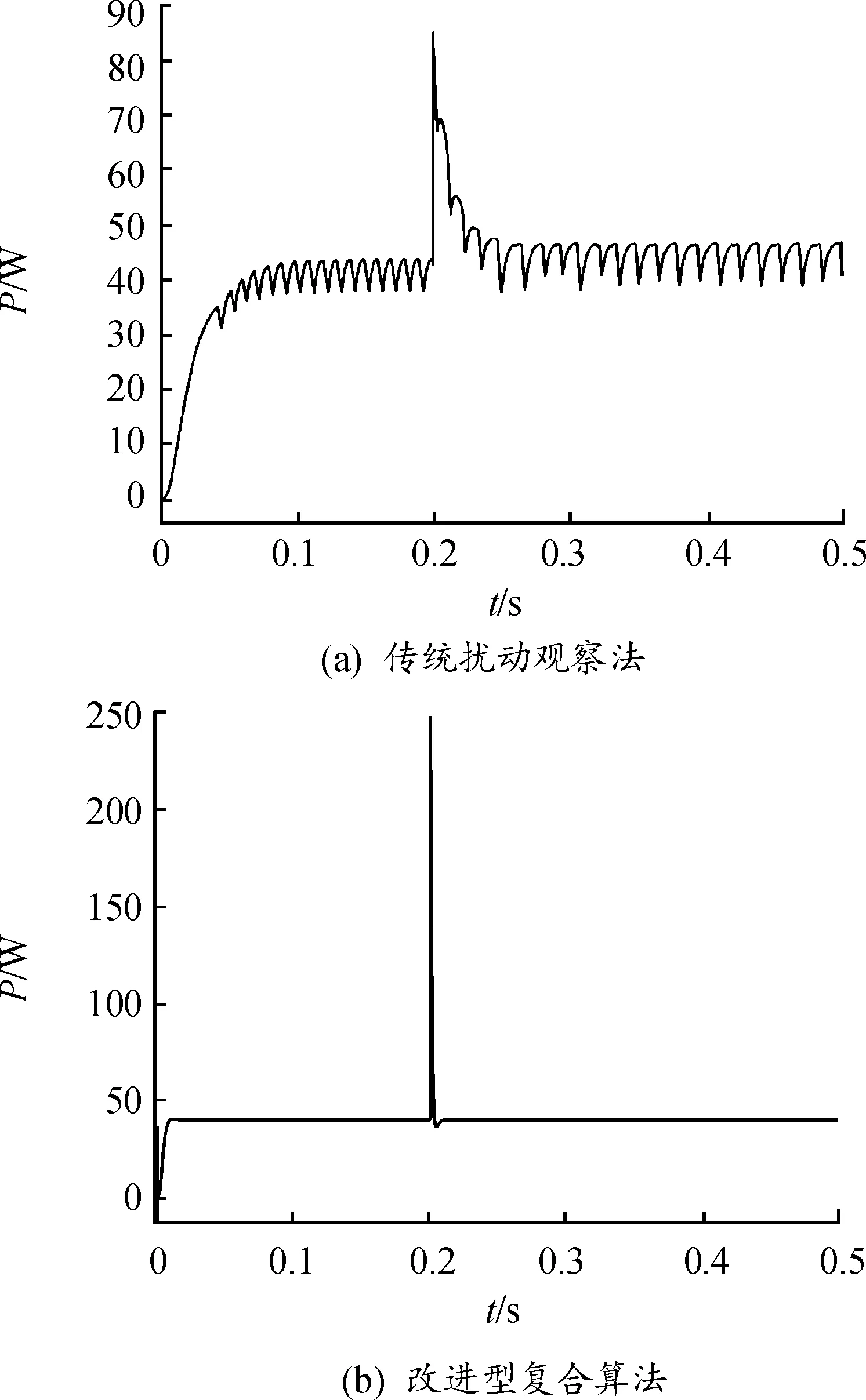
图9 外阻减小时最大功率跟踪仿真曲线Fig.9 Maximum power tracking when external resistance is reduced
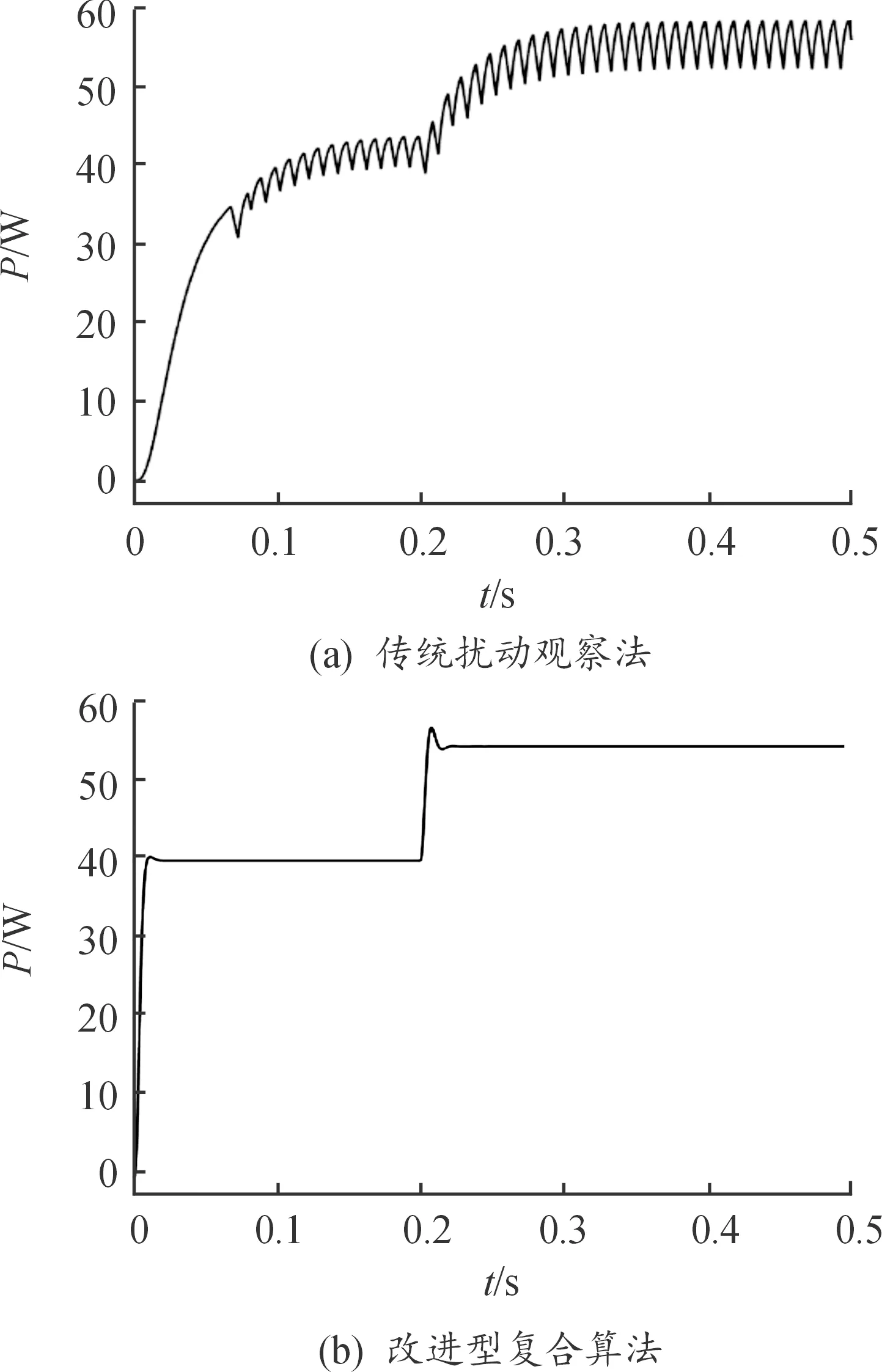
图10 内阻减小时最大功率跟踪仿真曲线Fig.10 Maximum power tracking when internal resistance is reduced
由图10可以看出,传统扰动观察法跟踪新的MPP时间约为0.1 s,达到新的MPP后功率振荡较大;而改进型复合算法用时约为0.015 s,输出功率无振荡,同时,该仿真结果也验证了改进型复合算法的准确性。
表2为传统扰动观察法与改进型复合算法在稳定状态下、外阻减小与内阻减小时MPPT时间。通过比较可以看出,改进型复合算法在稳定状态和外阻或内阻变化时下,MPPT时间最短,且很好地抑制了功率振荡,兼顾了响应速度和搜索精度,动态响应较好,验证了该方法的有效性。

表2 2种方法的MPPT时间Table 2 Comparison of MPPT times between the two methods s
5.2 实测阶段
为了进一步对基于改进型复合算法的铝空气燃料电池MPPT的方法进行验证,准确掌握铝空气燃料电池MPPT的实际效果,依托实验室系统进行实测验证,以铝空气燃料电池实验装置、电子负载、上位机及测试线缆等搭建实验室系统,其实测结构如图11所示。

图11 实测结构场景图Fig.11 Measured structure diagram
利用电子负载对实验平台进行负载突加减载测试,其实测结果与传统扰动观察法实测结果如图12所示。由图12可以看出,当负载突加减载时,铝空气燃料电池的输出功率和电压在波动之后维持在恒定值附近,相比传统扰动观察法,基于改进型复合算法的波动时间明显较短,且在最大点附近无明显振荡,具有良好的输出稳定性,验证了该方法的先进性。
当负载突加减载时,对基于改进型复合算法的铝空气燃料电池MPPT实测结果进行分析,其输出的功率和电压波形如图13、图14所示。从图中可以看出,铝空气燃料电池的输出功率和电压经短时间波动后仍维持在恒定值附近,波动时间分别为0.022 s、0.0158 s,且基本无明显的电压和功率波动,考虑现场实测环境对铝空气燃料电池系统工作的影响,实验室系统的现场实测结果与仿真实验结果基本吻合,也进一步验证了该控制策略的可行性和动态响应较好。
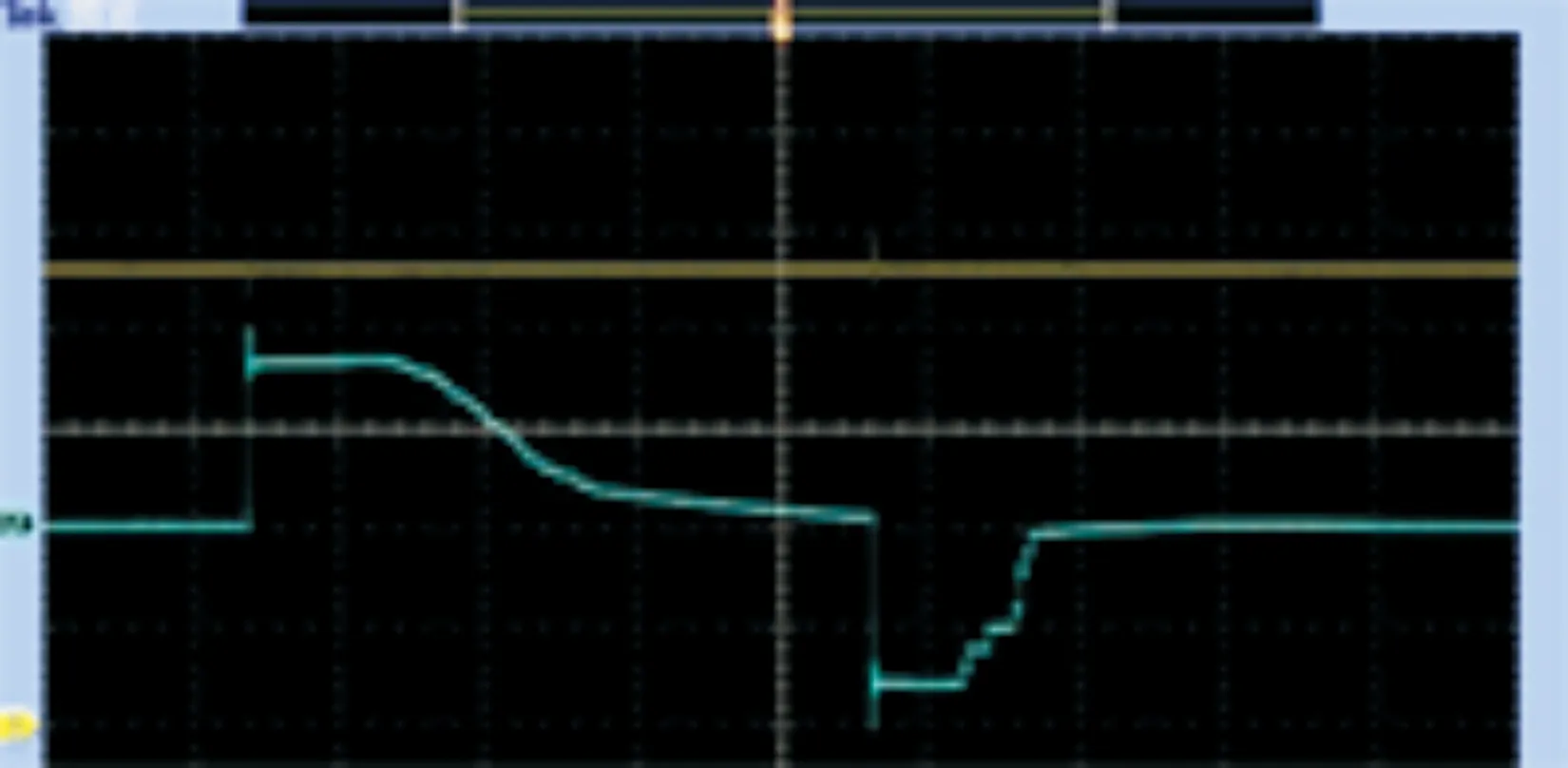
图12 2种方法实测结果图Fig.12 Comparison of the actual measurement results of the two methods
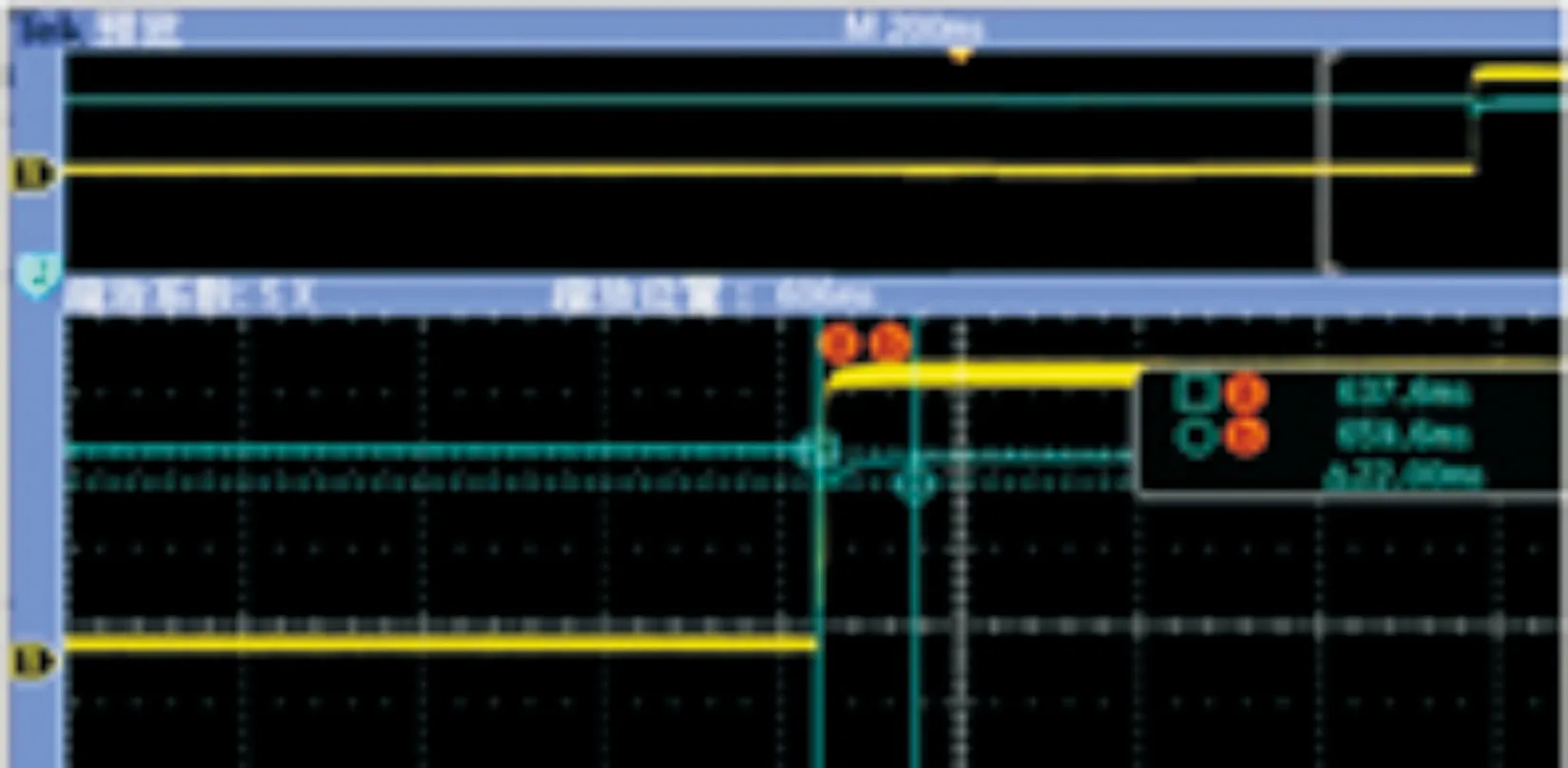
图13 负载突加载实测结果图Fig.13 Load burst loading measurement results

图14 负载突减载实测结果图Fig.14 The results of sudden load shedding measurements
6 结论
铝空气燃料电池的放电特性遵循一般燃料电池的极化曲线,在欧姆极化区电池端电压与放电电流近似遵循欧姆定律,特性曲线近似呈线性关系,且在欧姆极化区存在MPP,为了最大化地提高铝空气燃料电池高效稳定输出功率的能力,需对其进行MPPT研究。通过仿真分析,相比传统固定步长的扰动观察法,改进型扰动观察法通过自适应调节占空比,明显提高了MPP的跟踪速度,降低了MPP的误判。而后在MPP附近,结合模糊控制方法,在传统模糊控制规则上引入权重系数,进一步提升了工作环境变化时的响应速度和搜索精度。
通过仿真和实测结果,对比传统单一的扰动观察法,基于改进型复合算法在稳定状态和外阻或内阻变化时,MPPT时间最短,有效抑制了功率振荡,提高了跟踪速度和搜索精度。铝空气燃料电池具有普通燃料电池的输出特性,符合燃料电池动态模型,文中所提的基于改进型自适应占空比扰动观察法和模糊控制法相结合的铝空气燃料电池MPPT方法,也适用于其他普通类型燃料电池,具有较强的应用价值。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
语数外学习·高中版下旬(2021年10期)2021-02-18
学校教育研究(2019年15期)2019-12-15
新作文·小学低年级版(2018年3期)2018-04-17
中学物理·高中(2016年12期)2017-04-22
轻兵器(2017年2期)2017-03-10
轻兵器(2016年20期)2016-10-28
中学物理·高中(2016年2期)2016-05-26
中学生数理化·高三版(2016年4期)2016-05-14
轻兵器(2016年9期)2016-05-10