深基坑自动化测斜技术应用研究
2022-11-15 01:53邵长庚
经纬天地 2022年5期
邵长庚
(济宁市勘测院,山东 济宁 272000)
0.引言
随着我国城市化进程的日益加快,土地资源的规划利用已达到了瓶颈,地下空间的开发利用逐渐成为近年来我国主要发展方向[1]。基坑作为城市地铁、隧道等重点交通枢纽的基础工程,其安全性是整个工程项目的重中之重。随着基坑开挖深度的不断增加,对基坑安全监测的要求也逐渐提升,围护结构作为深基坑工程基础性结构,受基坑开挖的变形程度直接影响了基坑工程的安全性[2]。围护结构深层水平位移(墙体测斜)能够直观反馈基坑的变形情况,在基坑施工期间持续对其进行监测,获取围护结构变性信息,能够指导基坑安全施工。
围护结构深层水平位移普遍采用人工监测方法,监测人员采用测斜仪对每个测斜孔进行正反向测量,然后利用测斜数据处理软件对监测数据进行分析处理,与初值对比获取围护结构深层水平位移变量。基坑开挖期间普遍为一日一测,工作量大,作业强度高,监测数据有一定的滞后性[3]。为解决传统人工测斜的弊端,越来越多的学者投入围护墙深层水平位移自动化监测研究中去。在本次研究过程中,通过对传统人工测斜原理进行分析,以物联网传感技术为基础,结合边缘解算、无线通讯、机械自动化等技术,并采用低功耗设计,研发推出基坑维护结果深层水平位移自动化监测设备,并与传统人工测斜数据进行综合比对,对自动化测斜技术的可靠性进行验证,实现了基坑围护结构深层水平位移的实时监测,为深基坑工程的安全施工提供科学指导。
1.测斜原理
在基坑施工开挖或降水过程中,围护结构容易受到侧向土压力的影响,从而产生一定位移变形,当位移超过设计值或发生较大突变时,会造成一定的安全隐患,进而造成安全事故,故需要对基坑围护结构深层水平位移进行安全监测[4]。传统测斜方法采用滑动测斜仪进行监测,测斜仪包括传感探头、读数仪和线缆,如图1所示。传感探头具有上下两个导轮结构,在现场监测时,首先将高导轮朝向基坑,沿测斜管导槽下放至测斜管底,静置10分钟,待探头适应测斜管底温度后再进行上拉测量,每间隔0.5 m进行一次读数,直至测量到管口为止,然后低导轮朝向基坑再次进行测量。测量完成后将测量数据传输至计算机,利用数据处理工具进行数据处理,获取所需监测数据。

图1 测斜仪
测斜仪的本质是利用内部的高精度应变传感器所测得的应变差值转换为角度差,然后换算为水平位移量,通过累加处理,从而得到测斜管管形[5]。由测斜仪测得第i测段的应变差Δεi,换算得该段的测斜管倾角θi,则该测段的水平位移δi如式(1)和式(2)所示:

其中,δi为第i测段的水平位移(mm);li为第i测段的管长,通常取为0.5 m;θi为第i测段的倾角值(°);f为测斜仪率定常数;δi为测头在第i测段正、反两次测得的应变读数差之半Δεi=(εi+-εi-)/2。
测斜管管底存在一定量的位移时,可以管顶作为基准点,通过墙顶水平位移实测值δ0,并由管底向上计算第n测段处的总水平位移,如式(3)所示:

由于测斜管在埋设时不可能使得其轴线为铅垂线,测斜管埋设好后,总存在一定的倾斜或者挠曲,因此,各测段处的实际总水平位移Δi'应该是各次测得的水平位移与测斜管的初始水平位移之差,采用管口修正得到成果,如式(4)所示:

式(4)中,θ0i为第测段的初始倾角值(°)。
2.自动化测斜
近年来,自动化测斜技术的研究始终是基坑工程中的重要课题。较为常用的自动化测斜技术为串联固定式测斜仪,将固定式测斜仪通过刚性连接杆件进行串联,逐节逐段下放至测斜管内,测深间隔为1m;管口采用固定装置将测斜仪固定,并将所有线缆接入数据采集箱,接入电源,进行测斜数据自动化监测[6]。该方法实现较为简单,但存有较多弊端。首先,固定式测斜仪自身较重,再加上刚性连接杆件,串联较多测斜仪时,整体重量较大,需要多人操作,极为不便;且串联后测斜仪自重较大,导致监测结果相对真实位移偏小,数据可靠性较差。
2.1 柔性测斜绳作业原理
为解决串联固定式测斜仪现存问题,在本次研究过程中,采用柔性测斜绳对围护结构深层水平位移进行自动化监测[7]。柔性测斜绳又被称为阵列式柔性测斜仪,主要由MEMS加速度计、解析电路板、标准测量单元以及外保护装置等构成,如图2所示。柔性测斜仪工作原理是通过MEMS微机电系统测量重力加速度在不同轴向上的数据来计算对应轴与重力方向的角度,通过角度的变化计算对应测量单元的位移量。

图2 柔性测斜仪
每个测量单元安装有三个加速度传感器,通过测量传感器的加速度值来计算对应轴与重力方向的夹角θ,通过夹角θ来计算对应测量单元的位移量,如图3所示。每个测量单元长度为L,则第i个测量单元在重力方向的坐标系中对应的坐标长度为d=L×Sinθi,对应的第i个测量单元在整体坐标系中的坐标为第1个测量单元到第i个测量单元的累加值如式(5)所示:

图3 柔性测斜仪作业原理

其中,d为三维轴线(X、Y、Z)中单个测量单元相对基准的变形值;L为单个测量单元的长度0.3 m、0.5 m、1 m;θ为单个测量单元对应轴与重力方向之间的夹角。
2.2 自动化测斜优势
采用柔性测斜仪对围护结构深层水平位移进行自动化监测,仅需外部供电,即可实现监测点的高频次自动化监测工作[8]。该系统集前端数据采集、边缘解算、无线传输于一体,所有监测数据均通过云端网关进行检校,由云平台进行可视化展示。相较于传统人工测斜以及串联固定式测斜仪,柔性测斜仪主要有以下优势:
(1)高频次。传统人工测斜多为一天一测,自动化测斜可依据工程需求设置监测频率,默认监测频率为1次/小时,可灵活调整,便于加密监测。
(2)实时性。自动化测斜不受工程施工和天气环境的影响,能够实现围护结构深层水平位移的实时监测,可通过电脑、App等方式对监测成果进行实时查看,可视化程度较高。
(3)可靠性。自动化测斜从人工测斜原理出发,将数据采集、解算等过程实现自动化[9],可靠性较高;自动化测斜设备一次性安装,监测过程无需人工干预,从而避免了人为误差的影响,监测成果准确度较高。
(4)便捷性。相较于串联固定式测斜仪,柔性测斜仪更为轻便,安装较为简捷,仅需一根RS485总线即可实现数据采集全过程;且柔性测斜仪在测斜管内紧密挤压,自重相对较小,测量成果更为可靠。
(5)经济性。自动化测斜技术能够大幅度降低人工成本,降低人工监测压力,设备可实现多项目循环利用,具有较高的经济性。
3.实例探究
3.1 项目概况
本次研究以某地铁车站深基坑为试验对象,基坑尺寸为362 m×22 m,开挖深度为21.5 m~25.0 m,由于车站位于市区,周边环境较为复杂,保护性建筑较多,故监测意义重大。在本次试验过程中,针对重要风险点进行自动化监测,自动化监测项目包含三维形变、围护结构深层水平位移、潜水水位、支撑轴力,本文重点对围护结构深层水平位移自动化监测成果的可靠性进行分析研究。
3.2 数据分析
本项目为基坑自动化监测试点项目,依据工程现场实际情况,对P34测斜监测点采用自动化监测,在自动化测斜设备安装前,监测人员采用美国新科测斜仪对该测斜孔进行人工初值采集,便于后续与自动化监测数据对比;并将自动化监测数据与两侧的P33和P35以及对面的P45人工监测点进行对比,分析自动化测斜数据的准确性。
3.2.1 数据稳定性分析
自动化测斜设备的安装需要现场具备一定安装条件,本工程项目施工现场较为复杂,安装自动化测斜设备时,现场第3层土方已经开挖完成,进场时间较为滞后。测斜自动化监测周期共计2个月,共采集到935组数据,平均每天不低于15组数据,监测频率较高;自动化监测数据中不可避免地存在一些噪点数据,由于该系统集成了数据去噪过滤算法,能够对显著异常数据进行有效过滤,未成功过滤的噪点数据共有3组,噪点率为0.32%,故表明数据采集成果较为可靠。
稳定条件下监测数据自身会有一定波动,但施工期间,数据波动同样会包含围护结构深层水平位移的真实形变量,故对自动化监测数据的稳定性进行分析,需选择未施工期间的连续数据进行分析研究。由于本次试验进场时间较晚,没有获取到项目前期未施工期间的数据,故选取连续6天凌晨未施工期间的数据,分析自动化监测数据的稳定性,如图4所示。
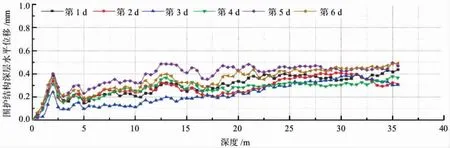
图4 自动化测斜数据波动分析
对图4进行分析可知:在未施工期间,自动化测斜数据波动大小随测量深度的增加而加大,其原因为采用管口起算形式,测量误差持续累加,致使管底数据波动较大,但最高不超过0.6 mm,故表明基于柔性测斜仪的围护结构深层水平位移自动化监测,数据成果重复精度较好,有较高的稳定性。
3.2.2 数据可靠性分析
柔性测斜仪安装完成后,无法对该测斜孔进行人工复测,故在安装前采用人工测量方式对该测斜孔进行初值采集,在自动化监测设备拆除后再进行一次人工测量,与自动化测斜数据成果进行对比,分析自动化测斜成果的准确性,如图5所示。通过对比发现,基于柔性测斜仪的自动化监测数据与人工测量数据基本一致,曲线重合度较高,从而表明采用柔性测斜仪进行单测斜孔的自动化监测,具有较高的可靠性。

图5 自动测斜与人工测斜数据对比
通过基坑工程开挖规律,并咨询监测领域专家得知,相邻测斜孔以及对称测斜孔的变形趋势有一定的关联性,故在本次研究中,将P34自动化测斜数据与相邻P33、P35以及对面P45测斜孔人工监测数据进行对比,并与施工工况进行关联,进一步研究自动化测斜成果的可靠性,如图6所示。
对图6进行分析可知:自动化测斜数据累计变形量要小于邻近监测点人工测斜数据,其原因为自动化监测设备进场时间较晚,在监测前该监测点已发生了轻微变形,故自动化监测累计变形量偏小,符合施工工况;自动化测斜与人工测斜数据变化规律基本一致,随基坑开挖深度的增加,最大变形位置也逐渐向深处变化;由于该项目在开挖深度不超过15 m的地方采用伺服钢支撑系统,故前15 m围护墙并没有出现较大变形;在第7层土方开挖期间,由于现场施工影响,基坑开挖和出土速度相对较慢,从而导致围护墙出现了较大位移变形,自动化监测和人工监测均体现了该现象。由此表明,基于柔性测斜仪的深基坑围护结构深层水平位移自动化监测,成果可靠性较高,在工程现场满足安装要求的条件下,完全能够取代传统人工测斜方式。

图6 自动化测斜数据分析
4.结束语
围护结构深层水平位移监测是基坑工程安全施工的重要保障,常规人工监测过程效率较低、作业强度高,故长期以来,自动化测斜技术的研究始终是极为重要的课题。基于串联固定式测斜仪的自动化测斜技术,不论从安装实施还是从数据成果来看,均存在较多弊端,因此本文基于柔性测斜仪作业原理,通过某地铁深基坑项目对自动化测斜数据的稳定性和可靠性进行综合分析研究,验证了柔性测斜仪在深基坑测斜领域能够取代常规人工测量方法,具有较高的适用性。
猜你喜欢
建材发展导向(2021年19期)2021-12-06
建材发展导向(2021年15期)2021-11-05
水利规划与设计(2020年1期)2020-05-25
铁道通信信号(2019年11期)2019-05-21
城市建筑空间(2018年12期)2018-08-26
铁道通信信号(2018年1期)2018-06-06
中国卫生(2015年1期)2015-11-16
振动工程学报(2015年1期)2015-03-01
全球定位系统(2015年4期)2015-02-28
河北工程大学学报(自然科学版)(2015年3期)2015-02-27