三维激光扫描技术的基坑滑坡形变区域分析
2022-11-15 01:53赵笠
经纬天地 2022年5期
赵 笠
(广东省重工建筑设计院有限公司,广东 广州 510670)
0.引言
随着高层建筑、地下空间的不断发展,基坑工程的深度不断增大、规模和结构越发复杂,极易对周围土体产生不同程度的扰动,引起地表不均匀下沉,影响周围建筑、构筑物及地下管线的正常使用,造成严重的工程事故。因此,在基坑施工过程中,为精确了解基坑变形情况、工程的安全性以及对周围环境的影响程度,确保工程的顺利进行,就需要对基坑土体等进行全面、系统地监测。按照国家规范要求,对于深度大于5 m的基坑,必须进行变形监测。滑坡体变形监测作为基坑工程施工中的一个重要环节,对于判定施工对周围环境造成影响的程度、指导设计与施工具有重要意义[1]。
传统监测方式主要是在基坑周围建立基准点和监测点,利用经纬仪、测距仪、GPS来获取测量数据,这种单点监测方式不仅采集效率低、测量成本高,而且由于变形区域采集的特征点数量有限,监测点一旦被破坏会严重影响资料的连续性,难以反映监测范围内滑坡区域的变形情况。此外,传统测量手段对测区环境要求较高,如果监测点和基准点无法在理想区域布设时,也会导致监测信息无法精确反映施工进度下基坑的安全状态。近年来随着测绘技术的不断发展、测量服务领域的不断拓宽,对滑坡灾害变形预警要求也不断提高。三维激光扫描技术高精度、高效率的优势不断凸显,逐渐在建筑物变形监测、滑坡分析等复杂工程建设领域有着广泛应用。本文以某基坑工程为例,应用三维激光扫描技术,采集不同时间段的两期基坑滑坡区域点云数据,通过对比分析获得基坑滑坡情况,研究结果对后期做好构造物改善和边坡稳定具有重要参考价值[2,3]。
1.理论基础
1.1 三维激光扫描理论基础
三维激光扫描系统坐标原点位于扫描仪相位中心,X轴在横向扫描面内,Y轴在横向扫描面内与X轴垂直,Z轴与横向扫描面垂直。首先发射器发出一个激光脉冲信号,内部控制系统旋转反射镜,激光脉冲经物体表面漫反射后,沿几乎相同的路径反向传回到接收器,内部计算系统通过脉冲发出和接收时间,得到目标点到相位中心距离S,再结合脉冲发出时扫描仪水平和竖直方向旋转角α、β,最后通过坐标正算和校正,获得P点坐标,坐标原理如图1所示[4]。
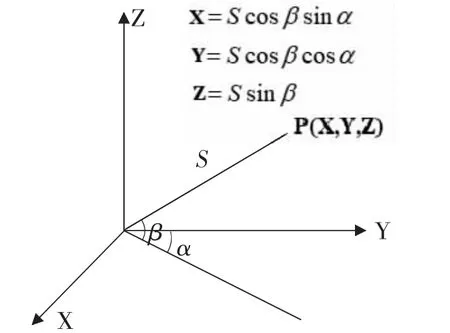
图1 三维激光扫描测量点坐标原理
1.2 算法研究
目前针对三维激光扫描技术在地表变形监测中的监测理论和数据处理方法还不够完善,本文在分析大量参考文献基础上,应用Hausdorff距离法的点云到点云的直接比较和Delaunay模型求差法确定基坑变形区域并计算滑坡变形值。
1.2.1 Hausdorff距离算法
Hausdorff距离算法简单来说就是比较点云之间距离,即对滑坡前后点云数据进行比较。Hausdorff距离算法核心是计算比较八叉树细分层级中的同源格网中比较点集p中的每个点s,到参考点集p'中的每个点s',对应的最近距离,如式(1)所示[5]:

通过式(1)计算出比较点集p到参考点集p'的Hausdorff距离,这个距离值被认为是变形值。
1.2.2 Delaunay模型求差法
Delaunay模型求差法即通过Delaunay算法构建滑坡区域的三角网,使用线性内插,以两期高程差值为Z轴生成的偏差色谱图作为变形监测结果来表示地表的变形信息的方法。该算法线性内插原理是利用不规则三角形顶点的数据点确定一个平面,继而求出内插点的高程值的方法。设内插点为p(x,y),则p点高程的函数表达式如式(2)所示[5]:

参数a0、a1和a2可以根据三个已知点p1(x1,y1,z1)、p2(x2,y2,z3)、p3(x3,y3,z3)计算,如式(3)所示:

2.外业数据采集及预处理
2.1 工程概况
本次实验对象为某大型深基坑,该基坑东西长350 m,南北宽120 m,基坑平均深11 m,由于受到短期强降雨影响,基坑周围地质松软,部分区域出现斜坡上的部分岩土体沿着原有的软弱面或软弱带向下整体滑移的现象,基坑周围施工队伍较多,环境复杂,传统监测方式难度较大。为避免造成人员和经济财产损失,因此需要分析基坑地表变化,对变形大的区域进行加固,避免引发安全事故。受某规划设计院委托,需在短时间内确定基坑滑坡整体变形区域并对变形值进行计算。
为保证观测结果的准确性,整体技术流程如图2所示。首先进行外业数据采集,包括扫描路线设计、踏勘选点、靶标布设、仪器架设、扫描参数设置和数据采集及保存;然后进行内业数据预处理,包括点云数据配准、点云滤波和点云坐标转换;再基于两种方法对基坑滑坡进行分析,包括Hausdorff法点云距离分析和Delaunay模型偏差分析,最后根据计算结果分析两种方法的应用场景。

图2 基坑滑坡变形监测整体技术流程
2.2 外业数据采集
基坑外业数据采集时,为保证数据的完整性,尽量减少不必要的补测和重复测量,首先要踏勘选点,根据测区实际情况进行测站布设。本次主要扫描对象为基坑西侧滑坡区域,为对基坑滑坡情况进行预测分析,两期数据采集间隔为10天,共采集两期点云数据。每期布设4个测站,其中测站1和测站2位于基坑顶部,测站2和测站3位于基坑底部,测站间交错布设,由于基坑底部还有大面积积水,且土质松软,不易布设靶标,因此外业数据采集只架站扫描。基坑外业数据采集方案如图3所示。

图3 基坑外业数据采集方案
2.3 内业数据预处理
内业预处理主要包点云配准、点云滤波、点云精简以及坐标转换:点云配准是将不同视角获取的点云数据进行拼接,获得统一视角的点云数据,本项目采用特征点方式进行点云配准;点云去噪是将偏离主体点云的漂移点、超出扫描区域的冗余点剔除,本项目主要噪声为来往施工人员以及建筑设备等,因此需要删除,防止后期在提取特征时造成误判;点云精简是根据目标点云特点,对点云数据进行压缩,减小计算机负荷,方便数据分析,由于本项目外业数据采集时选择点云密度较小的采集方式,因此不对点云数据进行精简处理。此外,为方便两期点云数据对比研究,还需要进行坐标转换,将两期点云数据坐标统一,方便后续两期数据对比研究[6]。
3.基坑滑坡点云分析
本章主要采用Hausdorff和Delaunay对预处理后的点云数据进行分析点云距离和模型偏差,得到监测周期内基坑变化区域和变化量。
3.1 Hausdorff法点云偏差分析
Cloud compare是一款开源的点云数据处理软件,该软件集成了八叉树结构和Hausdorff距离分析算法,可以直接用于基坑滑坡变形分析。首先将两期数据导入软件内,选择第一期点云数据为基准数据,并设置为绿色;第二期数据为对比数据,设置为红色。两期数据导入后效果如图4所示。

图4 两期点云数据
为方便进行点云数据对比分析,还需要将目标区域点云数据裁剪出来,减少目标外点云数据引入的外界偏差。点云数据导入后,选择“工具”菜单栏下的“点对点距离对比”功能模块,通过软件内置的八叉树结构层级,计算点云到点云的距离,两期点云对比结果如图5所示。
通过图5两期点云数据对比偏差色谱图可以看出,颜色越接近红色滑坡变形越大,整体来看70%以上的区域滑坡变形量小于0.4 m,可以看出大部分区域未发生明显滑坡,整体来看滑坡区域分散,主要区域为基坑西南靠近拐角位置。通过偏差柱状统计图可以得到,两期数据最大偏差距离为3.2 m,平均偏差0.34 m。

图5 Hausdorff法点云距离对比
3.2 基于Delaunay模型求差分析
Delaunay模型求差分析使用的是Polywork软件,该软件模型求差主要集成的就是Delaunay算法,同样以第一期滑坡数据为参考,内插出第二期数据相同点位置的高程值,第二期数据的高程值减去第一期数据的高程值即为滑坡变形值。首先需要将点云数据拟合成三维模型,建模软件选择的是Geomagic studio逆向建模软件,首先导入点云数据,剔除远离主体的点云数据,通过“封装”工具建立三维模型,后进行“孔洞”修补,建立两期基坑滑坡三维模型。
三模模型拟合完成后,需要进行两期数据偏差分析。首先将两期模型分别导入Polywork软件中,选择第一期模型并转化至“参考对象”,选择“对齐”菜单下的“分割视图”,将设计模型和点云分割成两个视图;再选择“点对”工具,方式选择“多点对”,从两个视图中人工分别选择多个同名点;然后选择“最佳拟合数据对象—数据至参考对象”,设置好迭代次数和限差,将设计模型与实测点云完全对齐;最后选择“测量”工具下的“数据对象偏差”,设置单位为米,建立误差色谱图。效果如图6所示。
通过图6模型偏差色谱图可以看出,在区域滑坡分布上结果接近于Hausdorff距离法,即绝大部分区域未发生明显滑坡,但是部分区域沉降偏差超过3 m,主要滑坡区域与Hausdorff距离法分析结果相似,都集中在基坑西南靠近拐角附近。

图6 两期模型偏差结果
从算法原理上来说,Hausdorff距离法能对地表变形监测信息进行准确表达,由于其主要是应用最近点进行距离计算的原理,如果其中一期点云数据存在缺失或者点云密度较小时,将影响结果精度,因此对点云质量要求较高;而Delaunay模型求差法主要通过内插得到高程值,因此对点云数据质量要求不如Hausdorff距离法高,但是其不适用于坡度较陡的区域,容易产生较大的高程误差;此外,在三维模型重建过程中,由于对点云数据进行拟合引入了二次误差,两种方法都可进行坡度分析,实际作业时可根据待测区域实际情况进行选择。
4.结束语
本文以基坑滑坡为例,首先基于三维激光扫描技术快速、精确获取目标物三维坐标数据,然后利用Hausdorff距离和Delaunay模型求差两种方法对滑坡区域和滑坡量进行计算分析,最后对两种方法产生的结果差异进行研究。研究结果对有效预防基坑滑坡灾害,及时发现和预报险情的发生及险情的发展程度,并针对区域及时采取安全补救措施具有一定参考价值。
猜你喜欢
河北地质(2021年1期)2021-07-21
西部交通科技(2021年9期)2021-01-11
学生天地(2020年6期)2020-08-25
数学年刊A辑(中文版)(2020年2期)2020-07-25
智能建筑与智慧城市(2018年11期)2018-11-28
中国资源综合利用(2017年2期)2018-01-22
北方交通(2016年12期)2017-01-15
中国房地产业(2016年2期)2016-03-01
山东青年(2016年3期)2016-02-28
系统医学(2016年8期)2016-02-20