
Lévy飞行的正余弦乌燕鸥混合算法及应用
2023-02-09 01:22孙珂琪陈永峰
机械设计与制造 2023年1期
孙珂琪,陈永峰
(陕西铁路工程职业技术学院铁道装备制造学院,陕西渭南 714000)
1 引言
近年来,工程结构优化设计问题变得越来越复杂。传统数值方法在求解这类复杂问题时,很难获得理想的优化解,为克服传统方法的缺点,元启发式优化算法得到了较大的发展,这些算法可以用来解决高维复杂带有非线性约束的工程结构优化设计问题。如海鸥优化算法(SOA)[1],灰狼优化算法(GWO)[2],正余弦优化算法(SCA)[3],蜻蜓优化算法(FA)[4],飞蛾火焰优化算法(MFO)[5]等。乌燕鸥算法优化算法(STOA)[6]是最近比较流行的一种新型智能优化算法,它在求解一些工业工程优化问题能够提供较好的结果,但是存在收敛精度低、种群多样性弱、易早熟等缺点。为改善该算法的性能,文献[7]提出了一种混合优化算法STOA−GA 增强了STOA 算法的局部搜索能力,并成功应用于求解同步优化特征选择的问题。
就工程实际应用而言,元启发式算法被广泛应用于解决主梁优化问题,文献[8]基于DOE和狼群算法对桥式起重机主梁进行了轻量化研究。文献[9]提出了DA_PSO算法来对主梁进行结构优化设计。文献[10]提出了改进的萤火虫算法,对主梁结构进行优化,取得较好的优化结果。文献[11]将混行策略引入GA与AFSA算法中,实现了主梁的轻量化设计。文献[12]将LSTBSVM与BAT混合优化算法用来解决主梁结构优化设计问题,并取得了较好的结果。中心引力算法用于解决箱型的起重机主梁优化设计问题,达到了在满足性能要求的情况下,质量最优的目的[13]。虽然这些优化方法能够成功地解决主梁结构优化问题,但是求解过程中依然存在稳定性差,误差较大等问题。
鉴于此,为克服标准的STOA算法的缺点,提高算法的性能和实际应用能力,这里提出了一种混合正余弦算法和Lévy飞行的自适应乌燕鸥算法(SLSTOA)。
改进的算法主要贡献有:(1)在STOA 算法的乌燕鸥攻击行为中,借鉴正余弦算法SCA的搜索方式,同时采用非线性递减自适应正弦因子w,来增强STOA算法的全局与局部探索能力。(2)在迁徙行为阶段,引入Lévy飞行机制,对乌燕鸥个体进行变异,扩大搜索空间,增加其多样性,改善陷入局部最优情况,增强全局探索能力。(3)迭代后期,对最优乌燕鸥个体Lévy飞行变异,提高其全局探索能力。(4)为验证所提算法的有效性,将其应用于解决32t/22.5m的桥式起重机主梁优化设计中。
2 乌燕鸥算法
乌燕鸥算法主要包括两种乌燕鸥群体智慧行为即迁徙行为和攻击行为。
(a)迁徙行为
在迁徙阶段,首先应该避免相邻乌燕鸥个体之间发生碰撞,可以用式(1)来表示。

式中:Ct(Z)—指乌燕鸥不碰撞当前位置;Pt—指乌燕鸥当前位置;S—在[2,0]内的线性递减因子,可以用式(2)计算。

其中,z=0,1,2,...,Maxiteration,Cf=2。
其次在满足不碰撞的条件下,乌燕鸥个体向最佳搜索方向移动,可以用式(3)表示。

式中:Mt—指不同的乌燕鸥位置Pt(z)朝着最佳的乌燕鸥位置Pbt移动;C2—是一个随机全局调节因子。
可以由式(4)计算。

式中:r—是一个[0,1]内的随机数。
最后,乌燕鸥个体的位置由式(5)来更新。

式中:Dt—指根据乌燕鸥当前位置和最佳乌燕鸥的位置确定的。
(b)攻击行为
在迁徙过程中,乌燕鸥个体采用螺旋方式来攻击猎物,可由式(6)来描述这种攻击行为:

式中:r—每个螺旋的半径;i—在0 ≤k≤2π 里的任意角度;u和v—螺旋形状的相关常数;e—自然对数的底数。乌燕鸥个体的位置由式(7)确定。

标准乌燕鸥算法的步骤流程图,如图1所示。

图1 标准乌燕鸥算法的步骤流程图Fig.1 Flowchart of STOA
3 混合正余弦算法和Lévy飞行的自适应乌燕鸥算法(SLSTOA)
3.1 自适应正余弦策略
在标准的STOA算法,乌燕鸥个体随着迭代次数的增加,乌燕鸥个体的搜索空间逐渐减小,易造成乌燕鸥群体的种群多样性降低,陷入局部最优。为克服此问题,在乌燕鸥攻击行为中,借鉴正余弦算法SCA的搜索方式,同时采用非线性递减自适应正弦因子w,在迭代初期,w取值较大,可以增强其全局探索,在迭代后期,w取值较小,可以增强其局部勘探能力。
标准的STOA算法的攻击阶段,乌燕鸥个体的位置更新由改进的时式(8)和式(9)确定。

式中:r1—[0,1]内的随机数。
3.2 Lévy飞行策略
在标准的STOA算法迁徙行为中,当乌燕鸥个体不断向最佳个体移动过程中,随着迭代次数的增加,在最优解附近邻域内的乌燕鸥群体多样性在减弱,使得乌燕鸥个体不易跳出局部最优。为此,在迁徙行为阶段,引入Lévy飞行机制,对乌燕鸥个体进行变异,扩大搜索空间,增加其多样性,改善陷入局部最优情况,增强全局探索能力。在迁徙行为阶段,改进后的乌燕鸥个体位置更新方式由式(10)~式(12)确定。Lévy飞行可以由式(10)和式(11)确定[5]。

其中,Γ(x)=(x−1)!
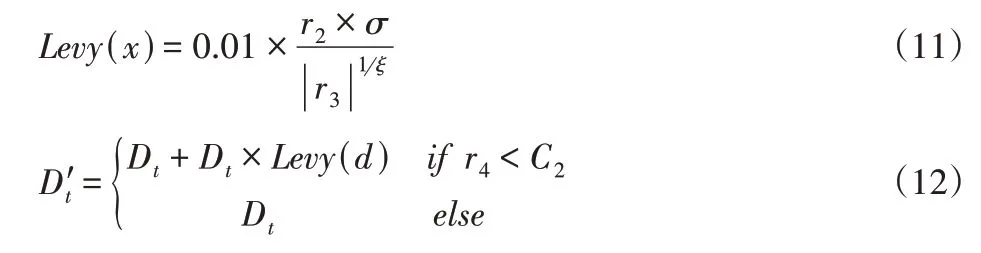
式中:r2,r3,r4—[0,1]内的随机数;ξ—Lévy飞行系数,一般取值为1.5。
同时,对最优的乌燕鸥个体采取Lévy 飞行机制进行变异。如式(13)所示。

因此,SLSTOA算法的步骤流程,如图2所示。
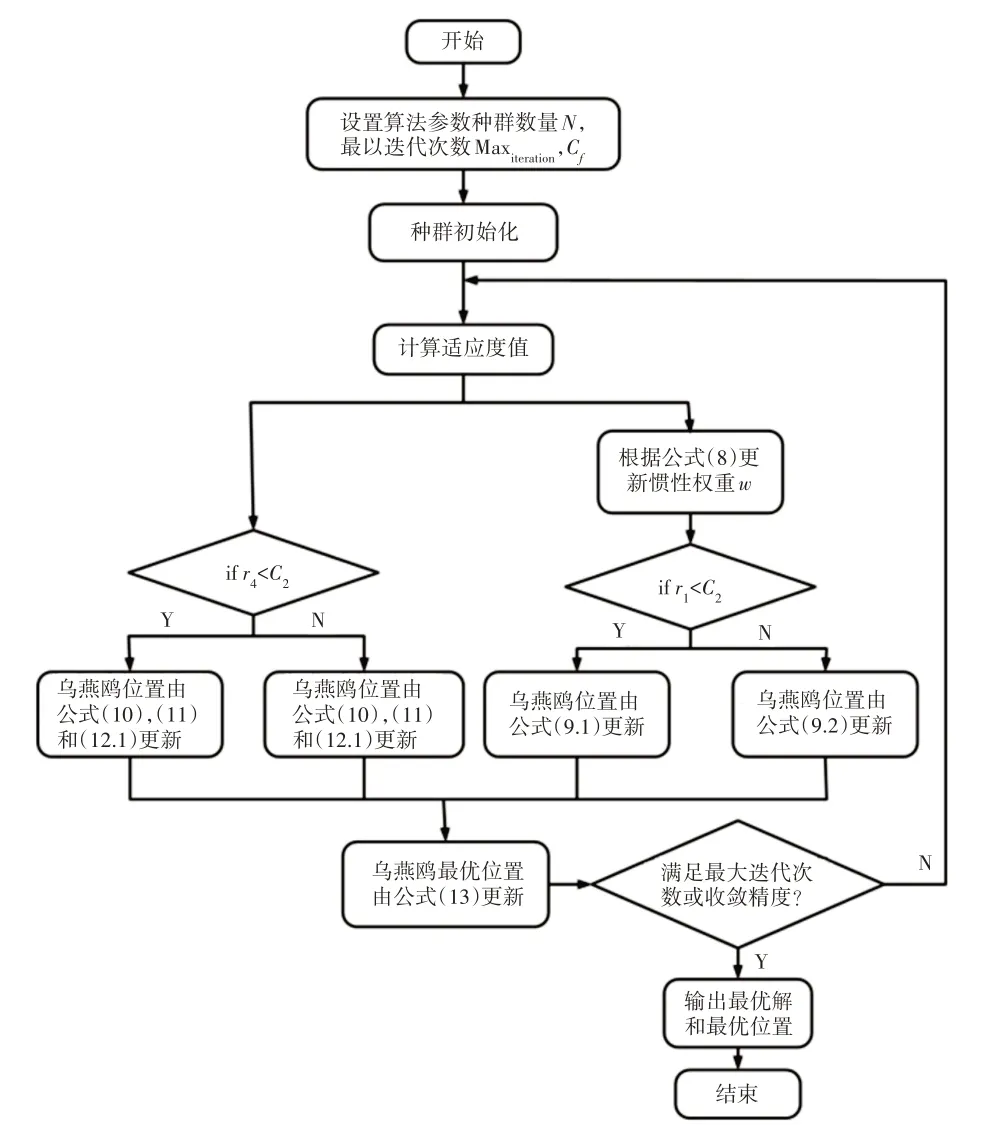
图2 混合正余弦算法和Lévy飞行的自适应乌燕鸥算法流程图Fig.2 Flowchart of SLSTOA
4 SLSTOA算法性能评价
为验证SLSTOA算法的有效性和鲁棒性。通过选取四种先进的算法SOA,GWO,SCA和MFO和5个测试函数来对SLSTOA算法的性能进行分析。算法参数设置,如表1所示。5个测试函数(包含单峰和多峰函数,高维和低维函数),如表2所示。所有算法均在相同的实验环境下(即Windows 7 64位系统,8G内存,处理器为Intel Core i7,2.3GHz,仿真软件为Matlab 2019b)独立进行30次计算,实验结果选取30次结果的平均解,标准差和耗时。
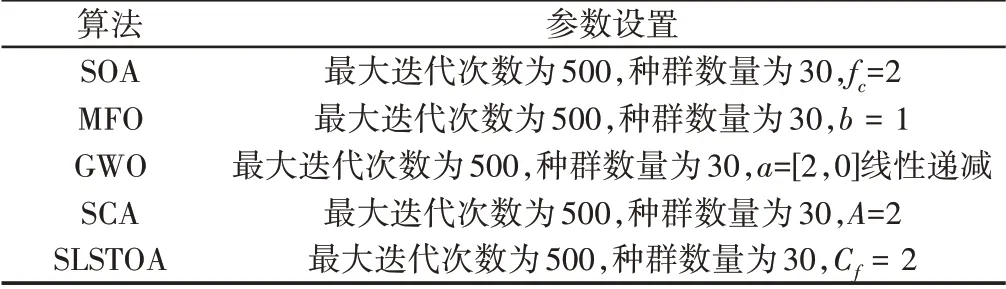
表1 算法参数设置Tab.1 Parameter Settings of Algorithms
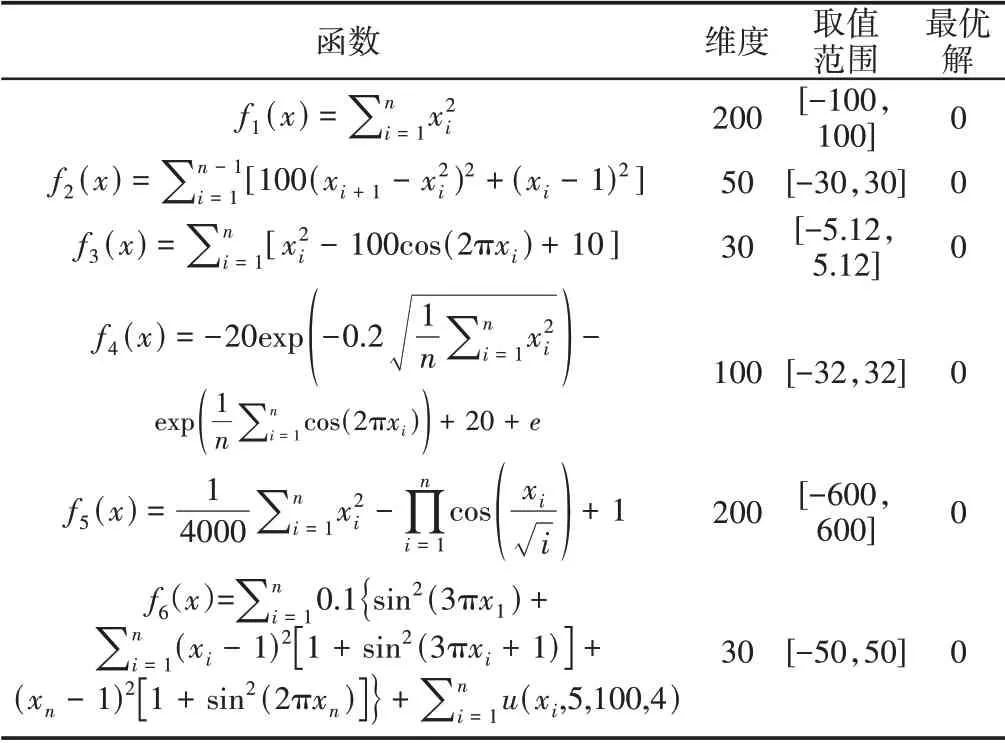
表2 测试函数Tab.2 Test Functions
4.1 结果分析
不同测试函数下,各种算法的实验结果,如表3所示。由表3可知。从平均解来看,对于F1,SLSTOA算法可获得全局理论最优解0。GWO算法的收敛精度可达1E−08。SLSTOA算法收敛精度明显高于其他四种竞争算法。

表3 实验结果Tab.3 Experimental Results
对于F2,SLSTOA和GWO算法获得平均解精度可达1E−01,且高于GWO,SCA,SOA 和MFO 算法。对于F3,SLSTOA 算法获得全局理论最优解0。收敛精度明显高于GWO,SCA,SOA 和MFO算法。对于F4,SLSTOA算法获得全局理论最优解0。收敛精度明显高于GWO,SCA,SOA 和MFO 算法。对于F5,SLSTOA算法同样可获得全局理论最优解0,明显优于GWO,SCA,SOA和MFO算法。
对于F6,SLSTOA 算法的收敛精度可达1E−03,明显优于GWO,SCA,SOA和MFO算法。总之,不管是高维还是低维,单峰还是多峰的测试函数,相比其他算法,SLSTOA 算法可以获得较好的平均解,说明SLSTOA 算法具有较好的寻优能力和收敛精度。从标准方差来看,对于F1,F2,F4和F5,SLSTOA算法的标准方差为0。
对于F3和F6,SLSTOA算法获得的标准方差明显小于其他4种算法。因此,对于所有的测试函数,SLSTOA 算法的标准差数值较小充分说明了在寻优过程中,SLSTOA算法具有更强的鲁棒性。从平均耗时来看,对于所有测试函数,SLSTOA 算法耗时低于MFO算法,与SOA算法接近,高于GWO和SCA算法。这表明了SLSTOA算法是一种高效的全局搜索方法。
4.2 收敛曲线对比分析
测试函数的收敛曲线,如图3所示。从图3可以明显看出,对于所有的测试函数,与GWO,SCA,SOA 和MFO 算法相比,SL‐STOA 算法的收敛曲线一直位于其他算法的下方,表明SLSTOA算法收敛速度更快,并且可获得更小的最优解,求解精度更高。SLSTOA算法的收敛曲线较大的拐点较少,可以很快地跳出局部最优。总之,对于所有测试函数,SLSTOA 算法能够表现出更佳的收敛性能。

图3 测试函数收敛曲线Fig.3 Convergence Curves of Test Functions
综上所述,相比其他算法,SLSTOA 算法通过不同的改进策略,提高了STOA算法的性能,是一种效率更高,收敛精度高和鲁棒性强的元启发式算法。
5 工程案例
本案例选择用偏轨箱型双梁桥式起重机主梁作为优化对象。起重量为32t,跨度为22.5m,工作级别为A5,材料为Q235钢。通过SOLIDWORKS三维建模软件,可以得到主梁结构模型,如图4所示。主梁优化的主要目的在于轻量化,同时需要保证结构的安全可靠性,故综合考虑质量的影响因素和权值大小,选取主梁截面参数作为设计变量。给出了优化设计变量的选取与取值范围,如图5和表4所示。
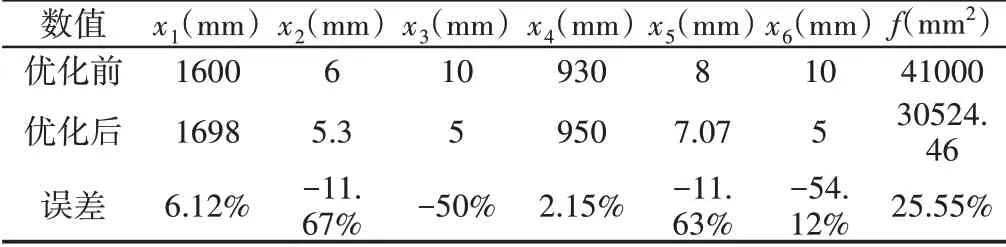
表4 主梁优化结果Tab.4 Optimization Results of Main Girder

图4 主梁结构Fig.4 Main Girder Structure
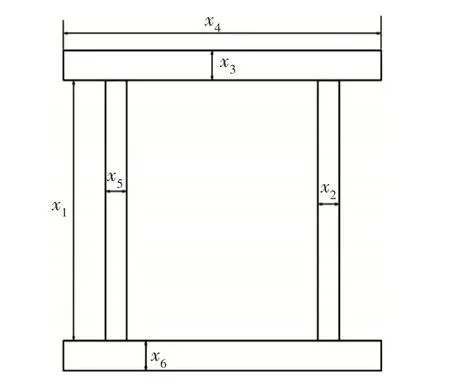
图5 主梁截面参数选取Fig.5 Parameter Selection of Main Girder Section
选取主梁截面面积最小作为优化目标函数,同时主梁结构需满足刚度约束,强度约束和整体稳定性约束等条件。结合起重设计手册。可以建立主梁结构优化的数学模型,如式(14)所示。

采用SLSTOA 算法对主梁进行优化的收敛曲线,如图6 所示。优化前后结果对比,如表4所示。

图6 主梁收敛曲线Fig.6 Convergence Curve of Main Girder
由图6 可知,采用SLSTOA 算法可以快速地实现主梁的结构优化。由表5 可知,主梁优化前截面面积为41000mm2,优化后的截面面积为30524.46mm2,减小了25.55%,达到了轻量化的目的。
为了更好地检验优化后的主梁性能,通过ANSYS Work‐bench对优化前后的主梁模型进行力学性能分析。网格采用Siz‐ing控制,将网格大小设置为50mm,划分之后节点总数为,单元总数为。划分网格之后模型,如图7所示。将小车、起升重量和司机室的重量简化为集中载荷加载在小车轮压位置并且插入加速度载荷模拟主梁自重;边界条件设置为在主梁两端端梁下侧设置位移约束。边界条件设置,如图8所示。优化前后有限元分析结果,如图9所示。由图9可知。

图7 主梁网格划分Fig.7 Main Girder Mesh
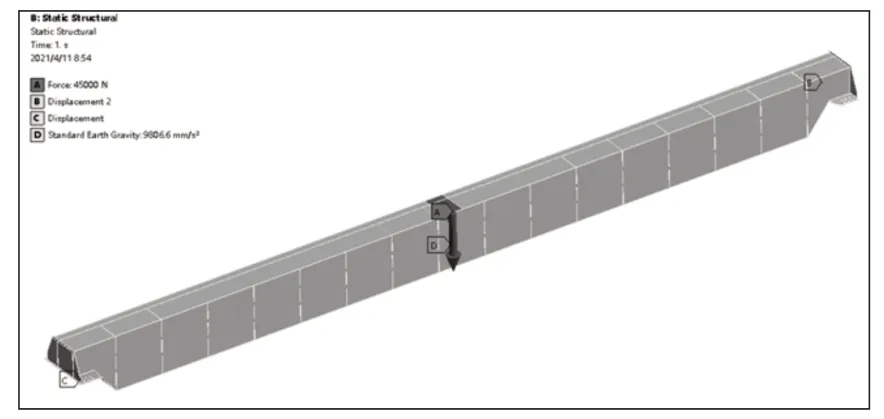
图8 主梁约束条件设置Fig.8 Constraint Condition Setting of Main Girder
由图9(a)、图9(b)可知,主梁优化前的最大应力大小为148.43MPa,优化后主梁的最大应力为156.24MPa,虽然最大应力有所增加,但是仍然小于其许用应力[σ]H=175MPa。满足强度要求。
由图9(c)、图9(d)可知,主梁优化前的最大变形为6.4024mm,优化后主梁的最大变形为6.9075mm,最大变形增加了约为0.5mm,小于其许用垂直变形。满足刚度要求。
由图9(e)可知,优化后的主梁一阶固有频率为5.6906Hz,沿水平方向的摆动,大于其许用自振频率[fv]=2Hz。

图9 有限元分析结果Fig.9 Finite Element Analysis Results
采用SLSTOA算法可以实现桥式起重机主梁的结构优化,达到轻量化的设计目的。也同时说明了SLSTOA算法具有较强的工程实际应用性能。
6 结论
为克服STOA算法的缺点,提出混合正余弦算法和Lévy飞行的自适应乌燕鸥算法(SLSTOA),并通过测试函数对SLSTOA 算法性能的进行了评价。并将SLSTOA算法应用于解决桥式起重机主梁优化问题中,验证了其实际应用能力。
得出以下结论:
(1)在STOA 算法攻击行为中,采用融合非线性递减自适应正弦因子与正余弦算法位置更新方式,同时在STOA算法迁徙行为中,引入Lévy飞行机制,改进了STOA算法迁徙位置更新方式和对乌燕鸥最优个体扰动,增强了STOA算法的全局与局部探索能力。
(2)通过测试函数对比分析,结果表明,与SOA,GWO,SCA和MFO算法相比,SLSTOA算法具备更好的优化性能,具有较高的求解精度,稳定性和鲁棒性。
(3)通过桥式起重机主梁优化实例分析,主梁的截面面积减小约为25.55%,达到了轻量化设计目的。
由此可以看出SLSTOA算法具有较强的实际应用能力,同时将来可以将SLSTOA 算法应用于其他领域如特征选择,故障诊断,车间调度等。
猜你喜欢
太原科技大学学报(2022年1期)2022-02-24
计算机仿真(2021年1期)2021-11-18
铁道建筑技术(2021年3期)2021-07-21
计算机工程与设计(2020年4期)2020-04-23
铁道通信信号(2019年8期)2019-10-10
通信产业报(2018年15期)2018-06-23
环球时报(2017-08-14)2017-08-14
物联网技术(2017年5期)2017-06-03
中学数学杂志(高中版)(2016年6期)2017-03-01
福建中学数学(2016年7期)2016-12-03
