
一种随机变论域Fuzzy控制器在医疗头盔中的实现
2023-03-16 12:06王月赵辉张元乌伦华
哈尔滨理工大学学报 2023年5期
王月 赵辉 张元 乌伦华

摘 要:目前的自适应模糊控制方法在实际问题中难以达到良好的效果。針对这一问题,提出一种随机变论域Fuzzy控制器。首先,基于原有的伸缩因子设计一种简单、精准的随机伸缩因子,并通过仿真对比验证其性能;接着,以实际前后圈梁伸缩的长度与理想状态下前后圈梁伸缩的长度期望值的误差和误差的变化作为输入变量,引起旋钮转速变化的多少作为输出变量,设计随机变论域Fuzzy控制器;最后,使用仿真实验对比响应曲线图分析得到,设计的模糊控制器性能明显提升,并且整个控制过程中超调小、稳定性高、响应时间有明显的缩短,实现了医疗头盔的治疗效果。
关键词:随机变论域;伸缩因子;随机变论域Fuzzy控制器;医疗头盔
DOI:10.15938/j.jhust.2023.05.019
中图分类号: TP273+.4
文献标志码: A
文章编号: 1007-2683(2023)05-0150-09
Implementation of a Random Variable Universefuzzy Controller in Medical Helmet
WANG Yue1, ZHAO Hui1, ZHANG Yuan2, WU Lunhua1
(1.College of Science, Harbin University of Science and Technology, Harbin 150080, China;
2.School of Mechanical and Power Engineering, Harbin University of Science and Technology, Harbin 150080, China)
Abstract:The current adaptive fuzzy control methods was difficult to achieve good results in practical problems. Aiming at this problem, a fuzzy controller with a random variation domain was proposed. Firstly, a simple and accurate random scaling factor was designed based on the original scaling factor, and its performance was verified by simulation comparison; Then, the error and error change of the expected value of the actual front and rear ring beam expansion and contraction and the length expectation of the front and rear ring beam expansion and contraction under ideal conditions are used as input variables, and the number of knob speed changes are used as the output variable, and the random variable domain Fuzzy controller was designed; Finally, the performance of the fuzzy controller of the design was significantly improved by comparing the response curve of the simulation experiment. And the entire control process is small, high stability, response time has been significantly shortened, to achieve the treatment effect of medical helmets.
Keywords:random variable domain; telescopic factor; stochastic variable universe fuzzy controller; medical helmet
收稿日期: 2022-04-02
基金项目: 四川省科技计划项目(2016JZ0014-1);黑龙江省自然科学基金(A201214).
作者简介:
王 月(1996—),女,硕士研究生;
张 元(1966—),男,教授,博士研究生导师.
通信作者:
赵 辉(1963—),男,教授,硕士研究生导师,E-mail:mathwindow@163.com.
0 引 言
模糊控制是一种非线性控制,在工业制导、航天、机器人方面拥有着广泛的应用[1]。1974年英国马丹尼首先设计了模糊控制器,应用于锅炉和蒸汽机的控制,取得了成功。由此,模糊语言控制器、模糊控制论、模糊自动控制等概念,就从此开始诞生了。此后被很多国内外学者进行了更深入的研究。后续为了使控制器达到更高的精准度,1995年李洪兴教授首次提出变论域模糊控制器,
其实质是插值器,并且根据维数的不同给出了相应的插值函数,克服了传统模糊控制器的不足之处[2]。例如,2000年,雷德明设计了一种新型模糊控制器——进化模糊控制器,其规则库由整数编码遗传算法在线调整,仿真结果验证了设计的合理性与有效性[3]。随后,李洪兴教授在变论域模糊控制器的基础上进一步提出了变论域自适应模糊控制器[4],文[5]和文[6]表明变论域自适应模糊控制器本质上是随着伸缩因子的加入使论域发生扩大或缩小的改变。文[7]研究了输入输出论域发生变化时对伸缩因子会有怎样的影响,其性能是否会有所改变。在对机械手的跟踪中通过伸缩因子的改变,及仿真实验结果验证了变论域自适应模糊控制器的有效性[8]。例如,2013年,谭兵文等分析了函数形式和模糊推理,两种选择变论域伸缩因子的方法,并对此进行改进,提出了使用误差分级的方法选择伸缩因子,最后进行仿真实验比较,得出使用误差分级选择伸缩因子性能更优、鲁棒性更好的结论[9]。随着伸缩因子的形式发生改变其论域也发生变化,这样能不断提高控制器的精度[10]。文[11]根据提出的一种混合型伸缩因子对三关节机械臂实现了精准的跟踪。文[12]实现了自吸泵在论域发生改变的情况下精度和性能的提升。
医疗头盔是一种药物输送,治疗类似于阿尔茨海默症的仪器被广泛应用在医疗方面,从古代发展到现代,大量学者对进行更深的研究,并将其应用到生活各个领域[13]。瑞典曾推出一种治疗抑郁症的头戴式头盔,目前已经在英国发售,美国FDA也审核通过了治疗抑郁症的新型医疗头盔。在我国例如,2011年,张亚君等[14]研制出了分布式可控制医疗制冷头盔,解决了一些由于温度产生的影响头盔性能的因素;2017年,王彦杰等[16]研制的芳纶针织增强体头盔,表明耐热性,阻燃性能更好极大的体现了头盔的性能;2021年,郑韵等[16]在对畸形婴儿头颅重塑方面提出了矫形头盔,治疗康复了畸形婴儿并且疗效较明显,且畸形程度越轻头颅形态越容易得到矫正。
本论文主要是根据模糊控制器的发展历程,及性能影响而产生的精度降低、鲁棒性不稳定、适用范围不广泛、时间超调等问题进行更深一步的研究。因此,本文根据实际情况等其他方面要求设计一种伸缩性能更好、更简单且稳定性更高的伸缩因子[17-20],并提出一种控制效果更显著的新型随机变论域Fuzzy控制器,将其应用到控制医疗头盔旋钮转速上,通过仿真实验分析验证本文设计的变论域模糊控制器的有效性与可靠性。
1 随机变论域伸缩因子算法
1.1 一种新型随机变论域伸缩因子的设计
首先基于文[4]给出李洪兴提出的伸缩因子的概念。
定义1 称函数α:X→[0,1],x
MT ExtraaA@ α(x)为论域X的伸缩因子,X=[-E,E],如果满足条件:
1)对偶性:(x∈X)(α(x)=α(-x));
2)保零性:α(0)=0;
3)单调性:α在[0,E]上严格单调增;
4)协调性:(x∈X)(|x|≤α(x)E);
x∈X,
记X(x)α(x)X[-α(x)E,α(x)E]{α(x)x′|x′∈X},
称X(x)为X上的变论域。
5)正规性:α(±E)=1。
设0<τ<1,置α(x)=|x|Eτ,则α(x)为满足定义1的伸縮因子,其中x为误差输入的精确值,E为误差输入的最大值。
以上李洪兴给出的伸缩因子需要进行复杂的运算,计算时间较长,对控制精度要求高。因此,应该选择一类精度高,且符合实际情况要求,较为简单的伸缩因子形式。下面根据文[13]提出一类改进的简单函数形式的伸缩因子。
定义2 已知α(x)是一种变论域伸缩因子,输入论域为X,[-xe,xe]为随机变论域,E[-xe,xe]为随机变论域的期望,则称α*(x)=α(x)+φ,为随机变论域伸缩因子。其中φ~N(0,σ2),E(α*(x))=α(x)。需满足如下条件:
1)对偶性:x∈X,E(α*(-x))=E(α*(x));
2)避零性:当|x|=0时,α(0)≠0,E(α(0))≠0;
3)单调性:E(α*(x))在[0,xe]上严格单调递增,在[-xe,0]上严格单调递减;
4)协调性:x∈X,|x|≤α*(x)xe;
5)正规性:E(α(±xe))=1。
具体形式如下:
α*(x)=1-11+kx4+φ
其中:x为误差的精确值;k为充分大的正数;φ~N(0,σ2)为随机变量。
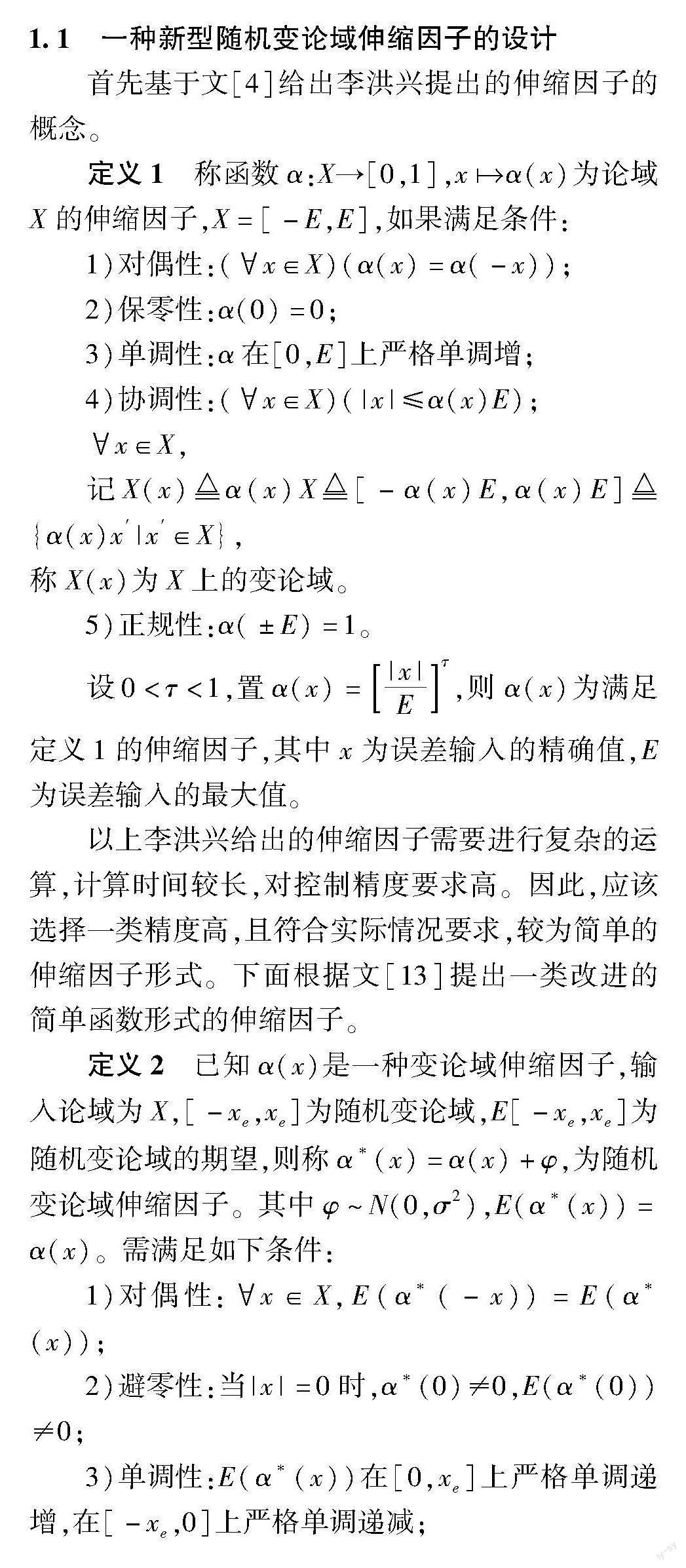
由于伸缩因子的变化引起论域的收缩或者扩张,假设初始论域为[-E,E]通过伸缩因子α*(x)的“伸缩”论域变为[-α*(x)E,α*(x)E]。图1为论域随伸缩因子α*(x)变化的图。
下面对上述所设计的伸缩因子满足定义2的5条性质进行稳定性分析。
1.2 新型变论域伸缩因子稳定性分析
对偶性:x∈X,有
Eα(-x))=E(1-11+k(-x)4+φ=E1-11+kx4+φ=E(α(x));
避零性:当|x|=0时,有α(0)=1-11+kx4+φ≠0,
则E(α(0))≠0;
调性:对x1,x2∈[0,xe],当x1 协调性:当k足够大时α*(x)→1,且|x|<1此时无论x发生怎样的变化,都可以保证发生变化之后的论域是不会超过开始时论域的变化范围,因此协调性满足,故|x|≤α*(x)xe; 正规性:E(α(xe))=E(1)=1。 1.3 变论域伸缩因子的伸缩原理及仿真对比分析 伸缩因子的伸缩原理为:误差x减小→11+kx4增大则α(x)减小→变论域伸缩因子的函数值减小→故论域缩小。同理,误差x增大→11+kx4减小则α(x)增大→变论域伸缩因子的函数值增大→故论域扩张。根据单调性可知当x从x1增大到x2,有x2>x1,则 1-11+kx42>1-11+kx41, 论域扩张,由变论域伸缩因子的正规性知,当误差x取得最大值xe时,α(xe)=1,此时变化的论域最大即为[-xe,xe],不能再继续扩大。 为了能更加清晰,直观的分析本文设计的随机变论域伸缩因子的性能,并与文[17]中传统伸缩因子做对比,在Matlab软件中进行仿真,得到当xe=1,k取104时随机变论域伸缩因子的对比函数图像和局部放大图像如图2、图3所示。 由图2和图3可见,本文所设计的伸缩因子在0.81s时已经趋于稳定,与传统的伸缩因子相比缩短了时间。而且稳定性好,具有更强的调节能力。可以看出改进的伸缩因子可以自由的随误差e的变化而变化,有一定的自适应性。这也对下文模糊控制器的应用起着很重要的调节作用。 2 随机变论域Fuzzy控制器在医疗头盔中的应用及仿真 将传统的手动旋转旋钮控制旋钮转速升级为,用随机变论域Fuzzy控制器控制旋钮转速,将医疗头盔发挥到最大的性能,提高了头盔的使用性和工作效率。 2.1 随机变论域Fuzzy控制器医疗头盔仪器的工作原理 医疗头盔整个仪器的工作原理:根据电磁铁输入稳定的动力带动两侧旋钮与顶部旋钮转动,随机变论域Fuzzy控制器自动调节旋钮到最佳转速,之后旋钮带动两侧调节盘与顶部调节盘转动,调节盘再通过定位销带动前后圈梁伸缩,前后圈梁会根据头部大小自动调节到合适位置,当前后圈梁达到头部最佳位置后停止运动,实现在不同条件情况下头盔达到最佳头部的佩戴位置。 图4、图5分别为医疗头盔仪器的结构主视图和整体的三维图。 头盔能否精确的佩戴在人体头部上,取决于随机变论域Fuzzy控制器控制旋钮转速,调节前后圈梁的可伸缩长度的多少,基于在机械实验室实验人员的多次试验结果,本文将选取前后圈梁可伸缩长度产生的误差e和误差的变化ec作为此随机变论Fuzzy控制器的输入,并经过一系列的量化计算后,得到模糊量E、EC。最后,再经过模糊推理、去模糊化得到精確的前后圈梁可伸缩长度f、随机变论域Fuzzy控制器的输出。 2.2 随机变论域FUZZY控制器在医疗头盔仪器中的设计 本文以双输入单输出系统为例进行设计,其工作原理为:随机变论域Fuzzy控制器通过输出的论域伸缩因子来调整自身论域的大小,然后再将圈梁伸缩长度的误差e和误差的变化ec进行模糊化处理,之后做模糊推理和解模糊化,最后计算旋钮转速的输出量。根据随机变论域Fuzzy控制器在医疗头盔仪器的工作原理得到其结构图如图6所示。 根据在机械实验室反复多次试验数据结果显示,圈梁可伸缩长度大概为0~188.7mm。以能否精准控制旋钮的转速作为评价指标,结合相关的实验数据及上述信息,可以设计随机变论域Fuzzy控制器步骤如下: 2.2.1 输入、输出变量的模糊语言描述 综合考虑到动态控制性能以及控制算法的可实现性两个主要方面,本文设计一个二维的模糊控制器,以实际前后圈梁伸缩的长度与理想状态下前后圈梁伸缩的长度期望值的误差E和误差的变化EC作为随机变论域Fuzzy控制器的输入变量,引起旋钮转速变化的多少作为输出变量u。下面给出E和EC及u的论域范围。 E和EC的论域为:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},u的论域为:{-7-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6,7},误差E和控制量u的模糊集为:{NB,NM,NS,O,PS,PM,PB},分别对应{负大,负中,负小,零,正小,正中,正大},误差变化EC的模糊集为:{NB,NM,NS,NO,PO,PS,PM,PB},分别对应{负大,负中,负小,负零,正零,正小,正中,正大}。 以上论域均采用区间变换的方法使其归属到无量纲的标准论域,均为[-6,6]。下面基于输入,输出语言变量论域的取值,选用三角型隶属度函数如下图7所示: 2.2.2 建立模糊控制规则 对医疗头盔旋钮转速情况可知,已知前后圈梁伸缩长度的误差大或较大时,此时应选择控制量为尽快消除误差变大为主的控制规则;已知前后圈梁伸缩长度的误差小或较小时, 为防止系统有超调趋势,此时应选择的控制量以系统稳定性为主的控制规则。因此根据文[12]的模糊控制规则表进行适当的改进,可以设计出如表1所示56条模糊控制规则的随机变论域Fuzzy控制器规则表: 2.2.3 模糊变量的赋值表和模糊控制查询表的确定 根据上文确定出误差E、误差的变化EC、控制量u的论域与模糊集,下面根据数据的特征、实际旋转情况,给出论域内的元素对于模糊语言变量的隶属度,如表2,3,4所示模糊变量E、EC、u的隶属度。 下面模糊控制规则用if-then语句可以表示为: if E=NB and EC=NB then u=PB, 由Mamdani推理法可得出第一条模糊控制条件语句,以及相对应确定的模糊关系R1,其形式可以概括如下: R1=NBE×NBEC×PBu, 将上述56条模糊控制规则分别与确定的模糊关系R1,R2,…,Ri进行取合运算,可得总的模糊关系矩阵: R=R1∨R2∨…Ri,i=56 因此当误差、误差的变化的模糊值为E和EC时,可以求出输出控制量u1的模糊值为 u1=(E×EC)R1 那么整个输出控制量进而也可以求得,用以下式表示所求得的模糊集合u,即 u=u1+u2+…+u56 最后结合最大隶属原则可以将求得的模糊输出量转化为精确量。 根据以上的计算结果和语言变量论域的量化等级,可以给出模糊控制查询表,如表5所示。 由随机变论域Fuzzy控制器采样时刻,得出控制变量E和EC模糊化的结果,则可根据上述建立的模糊控制查询表,很快地找到与之相对应的控制量u,并且经过反模糊化计算,将其模糊量转化为精确量,最终的精确量作为随机变论域Fuzzy控制器对医疗头盔旋钮施加具体、精准的转速,为实时控制的输出。 2.3 Matlab仿真及结果分析 接下来对设计好的随机变论域Fuzzy控制器做Matlab仿真,伸缩因子选择上述所设计出的鲁棒性较强、伸缩性能较优的伸缩因子。选择以编写S函数形式的方式进行仿真研究。首先,将模糊控制规则表输入到Matlab软件中的Fuzzy运行程序里,并根据输入与输出论域的变化,反复调节最终给出模糊推理系统特性曲图,如图8所示。 将预先设计好的S函数运用到上文所设计好的模糊控制算法中,再加入变论域伸缩因子,保持其他参数不变,并在Simulink模块下进行搭建仿真框图做仿真试验,如图9所示。 由于考虑到医疗头盔仪器和常规的模糊控制器的作用效果方面等情况和系统的响应速度、控制精度之间存在的矛盾,选取上述已设计好的伸缩因子为该随机变论域Fuzzy控制器的伸缩因子,并设 α1(x)=α*2(x)=β(y)=1-11+kx4+φ, 将上述设计好的变论域伸缩因子应用在随机变论域Fuzzy控制器上,并更新上述已编写好的模糊控制算法,再利用Simulink仿真框图进行仿真模拟试验,则可以得到随机变论域Fuzzy控制器在医疗头盔仪器的仿真响应曲线图,如图10所示。 将文[21]中已有的传统型伸缩因子加入到随机变论域Fuzzy控制器中,仿真结果如图11所示。 由图可见,将设计好的伸缩因子和目前已有传统型的伸缩因子分别应用到随机变论域Fuzzy控制器上,仿真结果表明,新设计的伸缩因子超调、稳定性效果明显优于传统型伸缩因子。其运行环境为Windows10系统,进行操作。控制响应到平稳的时间从0.50s缩短到0.38s,使得隨机变论域Fuzzy控制器,超调量小而且控制精度高,具有较强的自适应性,能在更短的时间内趋于稳定。结果表明新设计模糊控制器的控制效果明显优于传统的模糊控制器。 3 结 论 1)对新设计的一种随机变论域伸缩因子,验证其稳定性,并通过绘制仿真图对比分析,说明新设计伸缩因子的合理性。 2)将新设计的伸缩因子应用到随机变论域Fuzzy控制器上,并通过最后的对比响应曲线图说明,模糊控制器的精度得到了有效提高,并且在很大范围内解决了鲁棒性不稳定、适用范围不广泛、时间超调等问题。 3)随着新设计的二维模糊控制器精度的提高,使得医疗头盔旋钮转速问题得到了改进,因此,不仅提高了在医学方面的工作效率也极大丰富了控制领域的适用范围。 参 考 文 献: [1] ROBERT Babuska, HENK B Verbruggen. Fuzzy Logic Control: Advances In Applications[M]. SG Singapore: World Scientific Publishing Company, 1999. [2] 李洪兴.数学神经网络(I)──神经网络的插值机理[J].北京师范大学学报(自然科学版),1996(4):452. LI Hongxing. Mathematical Neural Networks(I)-Interpolation Mechanism of Mathematical Neural Networks[J].Journal of Beijing Normal University(N atural Science),1996(4):452. [3] 雷德明.变论域的进化模糊控制器[J].武汉交通科技大学学报,2000(3):244. LEI Deming. Evolutionary Fuzzy Controller with a Variable Region [J]. Journal of Wuhan Transportation University,2000(3):244. [4] 李洪兴.变论域自适应模糊控制器[J].中国科学E辑:技术科学,1999(1):32. LI Hongxing. Variable Domain Adaptive Fuzzy Controller[J]. Science in China Series E:Technology Science,1999(1):32. [5] 储月娥,吕宗伟.模糊控制器的设计原理及其应用[J].自动化与仪表,2005(5):42. [6] 黄丽,胡世凯,李中夫,等.基于标准论域的模糊控制器设计[J].四川大学学报(自然科学版),2010,47(3):441. HUANG Li, HU Shikai, LI Zhongfu, et al. Design Fuzzy Controller Based on Normalized Universe of Discourse[J].Journal of Sichuan University (Natural Science Edition) ,2010,47(3):441. [7] 王艺. 变论域自适应模糊控制器的研究[D]. 西安:西南师范大学, 2004. [8] 杨丽. 变论域自适应模糊控制在机械手轨迹跟踪中的应用研究[D]. 成都:西南石油大学,2016. [9] 谭兵文,李春文.几种变论域伸缩因子选择方法的比较研究[J].科学技术与工程,2013,13(4):908. TAN Bingwen,LI Chunwen. Compartive Study of Several Selection Methods of the Expansion Factor for Variable Universe[J].Science Technology and Engineering,2013,13(4):908. [10]徐华彤. 随机变论域模糊控制器的设计及其在机械翻书传动系统中的应用[D].哈尔滨:哈尔滨理工大学,2019. [11]王宏涛,蒋汶松.基于混合型伸缩因子的机械臂控制优化研究[J].应用科技,2019,46(5):22. WANG Hongtao, JIANG Wensong. Research on Thec-ontrol of Manipulator Based on Mixed Contraction Expansion Factor[J]. Applied Science and Technology, 2019, 46(5): 22. [12]赵辉,单云霄,姜欣格,等.一种随机Fuzzy控制器的设计及在自吸泵中的实现[J].黑龙江大学自然科学学报,2020,37(1):106. ZHAO Hui, SHAN Yunxiao, JIANG Xinge, et al.Design of a Random Fuzzy Controller and Its Implementation in Self-priming Pump[J].Journal of Natural Science of Heilongjiang University,2020,37(1):106. [13]WEN Juan et al. Effect of Helmet Therapy in the Treatment of Positional Head Deformity[J]. Journal of Paediatrics and Child Health, 2020, 56(5) : 735. [14]张亚君,黄小华,李金新,等.分布式可控制医疗制冷头盔[J].杭州电子科技大学学报,2011,31(2):17. ZHANG Yajun, HUANG Xiaohua ,LI Jinxin,et al. Distributed Control Medical Cooling Helmet[J].Journal of Hangzhou Dianzi Universit,2011,31(2):17. [15]王彦杰,孟家光,张永锋.芳纶针织增强体头盔制作及基本性能研究[J].成都纺织高等专科学校学报,2017,34(1):104. WANG Yanjie, MENG Jiaguang, ZHANG Yongfeng.Production and Basic Properties Study of Aramid Knitted Reinforced Helmet[J].Journal of ChengduTextile College,2017,34(1):104. [16]郑韵,徐开寿,文蕴斯,等.矫形头盔对斜头畸形婴儿头颅重塑的影响[J].中华物理医学与康复杂志,2021,43(6):499. ZHENG Yun, XU Kaishou, WEN Yinsi. et al.The Efficacy of an Orthotic Helmet in Cranial Remodeling of Infants with Deformational Plagiocephaly[J].Chinese Journal of Physical Medicine and Rehabilitation,2021,43(6):499. [17]吴天宇,潘维加,颜帅,等.基于改进伸缩因子的变论域模糊控制在两区域AGC中的研究[J].电力学报,2016,31(4):291. WU Tianyu, PAN Weijia, YAN Shuai,et al. Researchon AGC of Two Area Based on Variable Universe Fuzzy Control with Improved Expansion Factor[J]. Journal of Electric Power. 2016,31(4):291. [18]邵誠,董希文,王晓芳.变论域模糊控制器伸缩因子的选择方法[J].信息与控制,2010,39(5):536. SHAO Cheng,DONG Xiwen,WANG xiaofang. Selection Method of the Contraction-expansion Factor of Variable University Fuzzy Controller[J]. Information and Control,2010,39(5):536. [19]王梦莲,徐林森,李开霞,等.一种改进的模糊PI调速算法设计[J].计算机仿真,2018,35(5):313. WANG Menglian,XU Linsen,LI Kaixia,et al. An Improved Fuzzy-PI Algorithm Research on Speed Control System[J]. Computer Simulation, 2018,35(5):313. [20]张蕾,廖绍雯.基于预测双反馈的3D打印机温度优化控制[J].计算机工程与设计,2021,42(7):2094. ZHANG Lei, LIAO Shaowen. Temperature Optimal Control of 3D Printer Based on Predictive Double Feedback[J]. Computer Engineering and Design, 2021,42(7):2094. [21]贺自名,牛江川,张静.基于Smith变论域模糊自适应PID蒸发源温度控制[J].控制工程,2021,28(7):1308. HE Ziming, NIU Jiangchuan, ZHANG Jing. Temperature Control of Evaporation Source Based on Smith Variable Universe Fuzzy Adaptive PID[J]. Control Engineering of China,2021,28(7):1308. (编辑:温泽宇)
猜你喜欢
新型建筑材料(2022年11期)2022-12-06
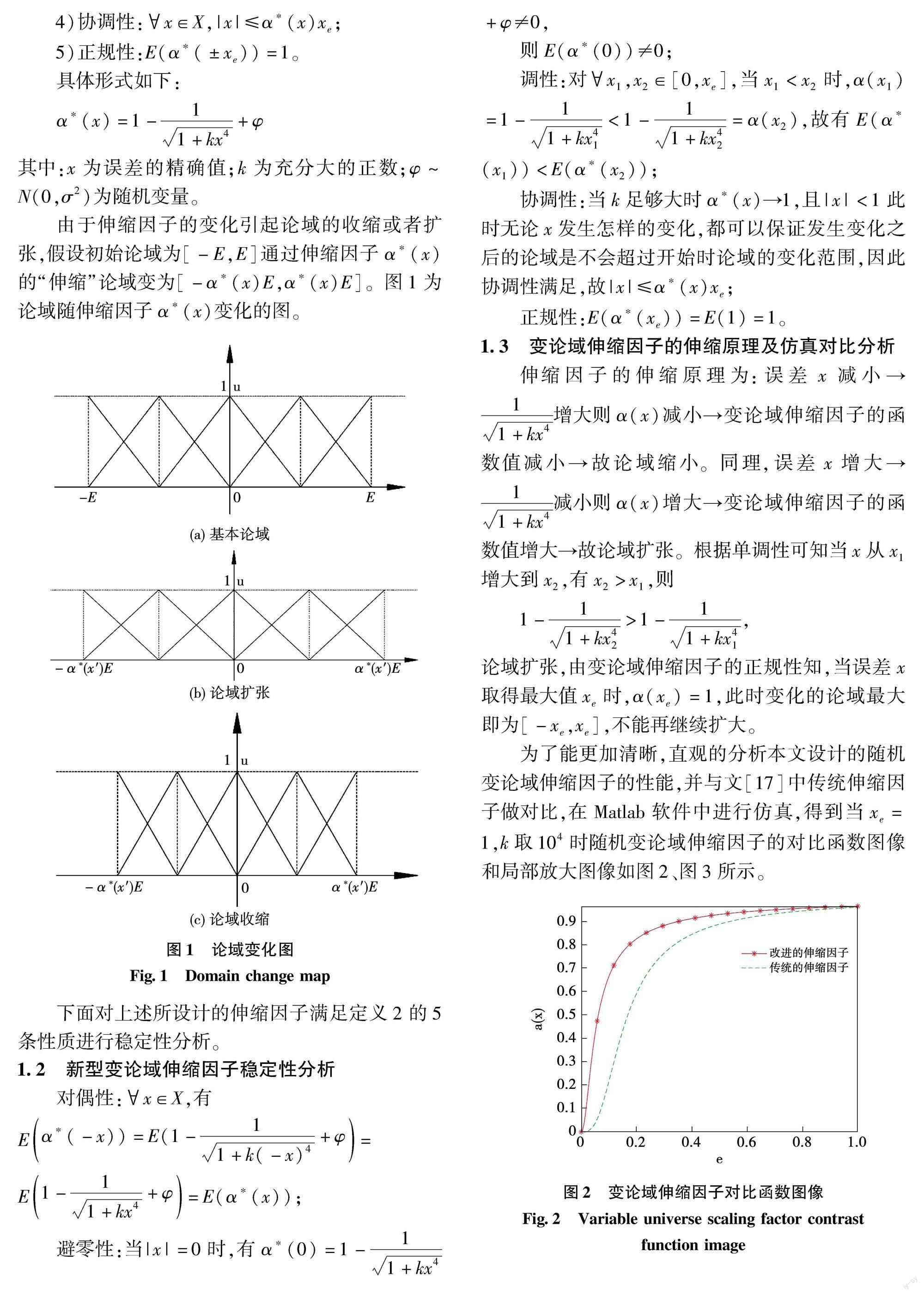
计算机仿真(2022年4期)2022-05-14
日用电器(2021年8期)2021-09-13
日用电器(2021年7期)2021-08-17
成都信息工程大学学报(2021年6期)2021-02-12
测控技术(2018年10期)2018-11-25
广东石油化工学院学报(2016年3期)2016-05-17
电源技术(2016年2期)2016-02-27
华北理工大学学报(自然科学版)(2015年3期)2015-08-05
大众摄影(2015年7期)2015-07-01
