
振动式有机肥排肥装置设计与试验*
2023-10-09 12:10刘信鹏焦静牛钊君杜嵇华黄小红李尊香
中国农机化学报 2023年9期
刘信鹏,焦静,牛钊君,杜嵇华,黄小红,李尊香
(1. 中国热带农业科学院南亚热带作物研究所,广东湛江,524091;2. 湛江市热带作物秸秆高效循环利用工程技术研究中心,广东湛江,524091; 3. 中国热带农业科学院农业机械研究所,广东湛江,524088)
0 引言
甘蔗作为我国南方热区的主要经济作物之一,其种植面积占我国糖料种植面积的85%以上,其产糖量占食糖总量的90%以上[1]。根据甘蔗种植过程中需要开沟、施肥、排种、淋水、覆土、盖膜、镇压等农艺要求[2],国内主推的甘蔗种植机有整杆式、实时切种式和预切种式;这3种种植机在田间作业过程中普遍施用颗粒肥,长此以往会破坏土壤结构,使土壤酸化导致土壤养分大量流失,造成连作障碍、土传病害严重,农产品质量与产量降低等问题。因此,需要通过减少化肥投入,增加有机肥施肥量,改善土地肥力,提高农作物品质,保障消费者身体健康,保护生态环境。
甘蔗有机肥机械化施肥是提高生产效率、减少化肥施用量、降低作业成本的有效技术措施。目前根据肥料排肥特点,排肥装置分为链板式、螺旋式、液压背推式等[3];这3种排肥装置应用在固体颗粒肥料的施肥效果较好,但对含有一定水分的有机肥作业效果不佳,施肥作业过程中存在排肥不均匀、结拱、作业效率低等问题。
针对以上问题,结合有机肥含水率高、黏性大、易结拱等特性,以螺旋排肥装置为扰动排肥基础,对排肥箱、导肥槽、螺旋转轴转速等关键部件进行设计分析,并结合电磁振动梳理单元进行电磁振动辅助排肥,对有机肥耦合电磁振动螺旋排肥装置进行单因素、多因素试验[4],验证有机肥排施装置的排肥性能。
1 排肥装置结构和工作原理
电磁振动螺旋排肥装置如图1所示,主要由排肥箱、螺旋绞龙、齿轮旋转轴、链条、变速箱、电磁振动单元等组成。

图1 电磁振动螺旋排肥装置Fig. 1 Electromagnetic vibration screw fertilizer discharge device1.导肥槽 2.驱动链 3.电磁振动单元 4.排肥箱 5.变速箱 6.机架 7.驱动轮
排肥装置固定在机架上,通过三点悬挂与拖拉机连接,并由拖拉机的动力输出轴,将动力输送到机具的变速箱,驱动机具变速箱运转,带动排肥箱底部的螺旋排肥轴单向匀速旋转,对有机肥进行排肥。电磁振动器通过固定频率振动排肥箱外壳,增加扰动力,将结拱在排肥箱内的有机肥,振落到排肥箱底部,辅助螺旋排肥装置进行排肥作业。
2 排肥装置主要部件设计
2.1 排肥箱设计
肥料箱是存放有机肥的重要结构,其结构尺寸参数决定有机肥的载重量与排肥作业面积。根据有机肥黏性大、易结拱的特性,结合热区甘蔗种植的农艺要求,选用有机肥螺旋排肥器,肥箱材料选用厚度为3 mm的304不锈钢,按长度为800 mm、宽度为600 mm、高度为1 100 mm对排肥装置的肥料箱进行设计,并在箱底排肥槽内置长度为800 mm、宽度为230 mm的旋转螺旋叶,同时在排肥槽的末端焊接长度为850 mm、宽度为240 mm、高度为100 mm的导肥槽,并将导肥槽左右对称焊接在肥料箱的机架上,如图2所示。
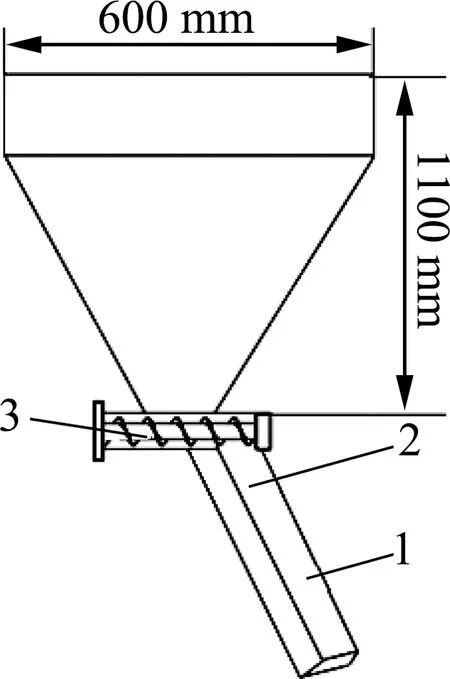
图2 螺旋排肥机构Fig. 2 Spiral fertilizer discharge mechanism1.导肥槽 2.排肥口 3.旋转螺旋
在无润滑条件下,为使肥料箱排出的有机肥全部掉落到旋转螺旋叶导肥槽内,在肥料箱内置表面摩擦系数μ为0.4的304不锈钢作为倾斜锥形导肥板,为保证其倾斜角α大于有机肥颗粒群体的休止角,将有机肥颗粒群体定义为小圆体颗粒,对其进行受力分析,如图3所示。

图3 肥料箱倾斜导肥板有机肥力学分析Fig. 3 Mechanical analysis of organic fertilizer on inclined guide board of fertilizer box
由图3可知,摩擦力
f=mgsinα=μmgcosα
(1)
式中:m——肥料质量。
因此,有机肥颗粒群体滑动的临界条件为:倾斜导肥板面的最小倾角α=arctanμ=arctan0.4=21.8°,所以倾斜导种板α取30°。
为了保证旋转螺旋叶能连续排肥,运用Jenike理论[5],计算肥料箱底部螺旋圆形排肥口的尺寸,方便肥料箱下料。
H(δ)=(1+M)+0.01(0.5+M)δ
(2)
(3)
(4)
式中:B——排肥口宽度,mm;
Bmin——最小排肥口宽度,mm;
γ——容积密度,kg/m3;
fc——开放屈服强度,MPa;
H(δ)——肥箱半顶角函数;
M——肥料箱形状系数;
δ——正应力,N;
I——变形区长度,mm;
h——肥箱材料厚度,mm。
其中轴对称方形倒锥螺旋肥料箱M=1,平面对称楔形肥料箱M=0,计算可得B≥180 mm,即最小螺旋圆形排肥口对角结构尺寸为180 mm。
2.2 排肥机构螺旋转轴转速分析
有机肥颗粒群体经螺旋排肥口拨落到导肥槽向种植沟内排肥,肥箱内有机肥颗粒群体以重力mg均匀分布在螺旋叶和旋转轴上,与螺旋叶摩擦力和螺旋叶旋转产生的离心力相互作用,随着螺旋旋转轴转速n持续增大,打破有机肥颗粒群体与螺旋叶之间的静摩擦力相对静止状态,有机肥颗粒群体以螺旋叶旋转方向为导向,从着落点M1沿轴向以速度v0运移至排肥口M2点,并以速度v1平抛掉落到导肥槽导肥板上,如图4所示。

图4 有机肥颗粒运移情况分析Fig. 4 Analysis of organic fertilizer particle migration
根据颗粒静止临界条件f′≥γoω2/g,计算旋转螺旋叶最低转速,如式(5)所示。
(5)
式中:g——重力加速度,m/s2;
γo——有机肥颗粒与螺旋中心轴距离,mm;
nmin——最低转速,m/s;
f′——有机肥颗粒与螺旋叶面间的摩擦系数。
当n≥nmin=80 r/min时,旋转螺旋叶将有机肥颗粒群体以螺旋轴向运移到导肥槽导肥板上,在电磁振动、肥料自身重力、肥料运移惯性力、旋转离心力等互相作用下,将肥料排施到导肥槽内。
2.3 导肥槽设计
导肥槽是将排肥箱拨落下来的有机肥定向、有序地向种植沟内进行排肥,主要由底层导肥板和左、右两块护板构成,其结构参数对排肥质量影响至关重要。运用SolidWorks对其建立三维模型,如图5所示。

图5 导肥槽Fig. 5 Fertilizer guide tank
当有机肥在螺旋叶轮的带动下,运移到螺旋排肥口,拨落到导肥槽;有机肥在导肥槽上受到电磁振动、肥料自身重力、肥料运移惯性力的互相作用,沿导肥槽向下滑移,向种植沟内进行排肥。为实现连续排肥,将有机肥颗粒定义为小圆体,运用柱坐标系对在导肥槽导肥板上的有机肥颗粒群体进行受力分析[6-7],根据图6可得有机肥颗粒群体运移速度与导肥槽内导肥板的倾斜角度关系,如式(6)、式(7)所示。
Fx=(ma-Ff)+Facos(90°-θ)/cosθ
(6)
Fy=mg+(ma-Ff)sinθ-Fasin(90°-θ)
(7)
式中:a——有机肥颗粒向下滑行加速度,m/s2;
Fa——有机肥颗粒的支座反力,N;
Ff——有机肥颗粒的摩擦力,N;
θ——导肥槽倾斜角度,(°);
Fx——有机肥颗粒沿倾斜角下滑力,N;
Fy——有机肥颗粒垂直分力,N。
从式(6)和式(7)可知,导肥槽的倾斜角度越大,有机肥在x轴方向的加速度分力增大,y轴方向的加速度分力减小,使y轴方向的摩擦力与有机肥的支座反力之和,小于加速度y轴方向分力与有机肥自身重力之和,导肥槽内导肥板对有机肥的约束变小,有机肥所受到的向下滑力变大,有机肥在导肥槽内的排肥加速度变大,运移速度也越快;当导肥槽倾斜角度变小时,导肥槽对有机肥的约束变大,运移速度相对变小,使排肥速度与施肥机作业前进速度不协调,导致有机肥不能连续排肥,达不到排肥要求。
为了保证导肥槽排肥质量,在导肥槽底板上加有机玻璃片,改变导肥板表面的摩擦系数,调整导肥槽的倾斜角度,避免有机肥与导肥板约束变大;并将有机肥颗粒群体定义为单独小圆体颗粒,对其进行受力分析,如图6所示。
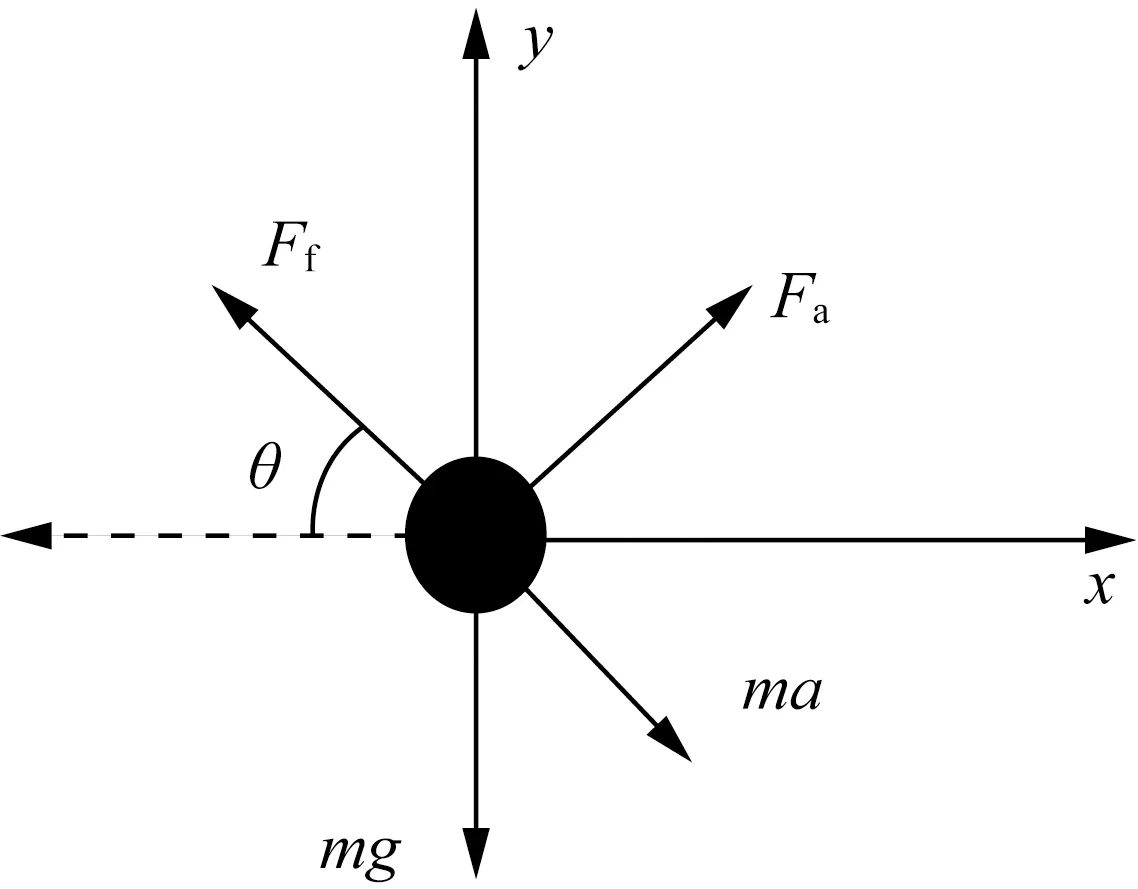
图6 导肥槽内有机肥颗粒受力分析Fig. 6 Force analysis of organic fertilizer particles in the fertilizer guide tank
Ff=mgsinθ=μmgcosθ
(8)
其中有机玻璃表面摩擦系数μ为0.8,导肥槽倾斜面的最小倾角θ=arctanμ=arctan0.8=38.65°,设计取导肥槽内倾斜导肥底板取θ=40°。
2.4 电磁振动分析
电磁振动器通过振动弹簧片分别与衔铁、排肥箱导肥板、导肥槽导肥板连接;铁芯线圈分别固定在排肥箱和导肥槽的导肥板上,其顶端与衔铁底面存在一定的间隙;作业时将一定频率的交流电进行半波整流,加载在固定于导肥板上的铁芯线圈上,使其产生脉动电磁吸力,使衔铁与导肥板产生电磁振动;在导肥板振动过程中,受到振动弹簧片约束,做同频率同相位旋转运动,使导肥板形成复合简谐运动。在电磁吸力产生的一个周期内,排肥箱导肥板与导肥槽导肥板上产生扭摆式简谐振动,导肥板随之运动,有机肥在电磁振动、自身重力、惯性力、离心力等互相作用下,沿旋转螺旋叶轴向运动,拨落到导肥槽内沿导肥板运移到种植沟内,实现有机肥定向连续排肥;其中滑动摩擦力是影响排肥质量的重要因素,根据古典库仑摩擦定律,结合电磁振动辅助排肥技术,得到有机肥颗粒群体运动的滑动摩擦力,即
F′f=μN
(9)
式中:μ——动摩擦因数;
N——接触面正压力,N。
由式(9)可知,滑动摩擦力大小与接触面正压力成正比;在正向压力不变的情况下,滑动摩擦力大小由滑动摩擦系数决定,通过改变有机肥颗粒群体与导肥板接触表面的滑动摩擦系数,达到理想滑动摩擦擦力。
3 关键部件强度校核分析
在螺旋叶运送有机肥的过程中,驱动齿轮通过传递转矩,带动旋转输出轴运动,推动螺旋叶开始作扭转运动,对有机肥颗粒群体进行运送。为了便于分析,运用SolidWorks软件对螺旋叶与旋转输出轴进行三维建模,并将其结构材料分别假定为不锈钢和45#钢的理想状态,同时将螺旋叶与旋转输出轴的固定接触部分作为固定约束,通过simulation的连续体离散化方法,对模型进行网格划分,如图7所示。结合螺旋叶受力分析(图8),进行外载荷添加,运用SolidWorks仿真模块,进行扭转工况分析,得到螺旋叶应力应变等效云图如图9所示。发现螺旋叶的最下端为最易变形位置,应力主要集中在螺旋叶与旋转输出轴的固定接触部分附近,为防止旋转输出轴出现变形情况,需要对45#旋转输出轴进行强度校核,检验旋转输出轴的强度,保证有机肥耦合电磁螺旋排肥装置的三维模型运动[8-9],其应变位移等效云图如图10所示。

(a) 关键部件三维建模

(b) 螺旋叶网格划分

(c) 旋转输出轴网格划分图7 关键部件三维建模与网格划分Fig. 7 3D modeling and meshing of key components
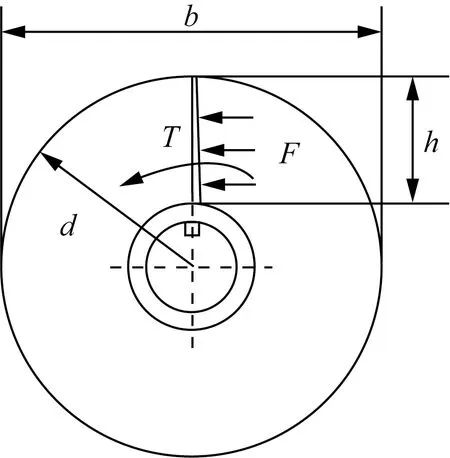
图8 螺旋叶连接受力分析Fig. 8 Force analysis of spiral blade connection
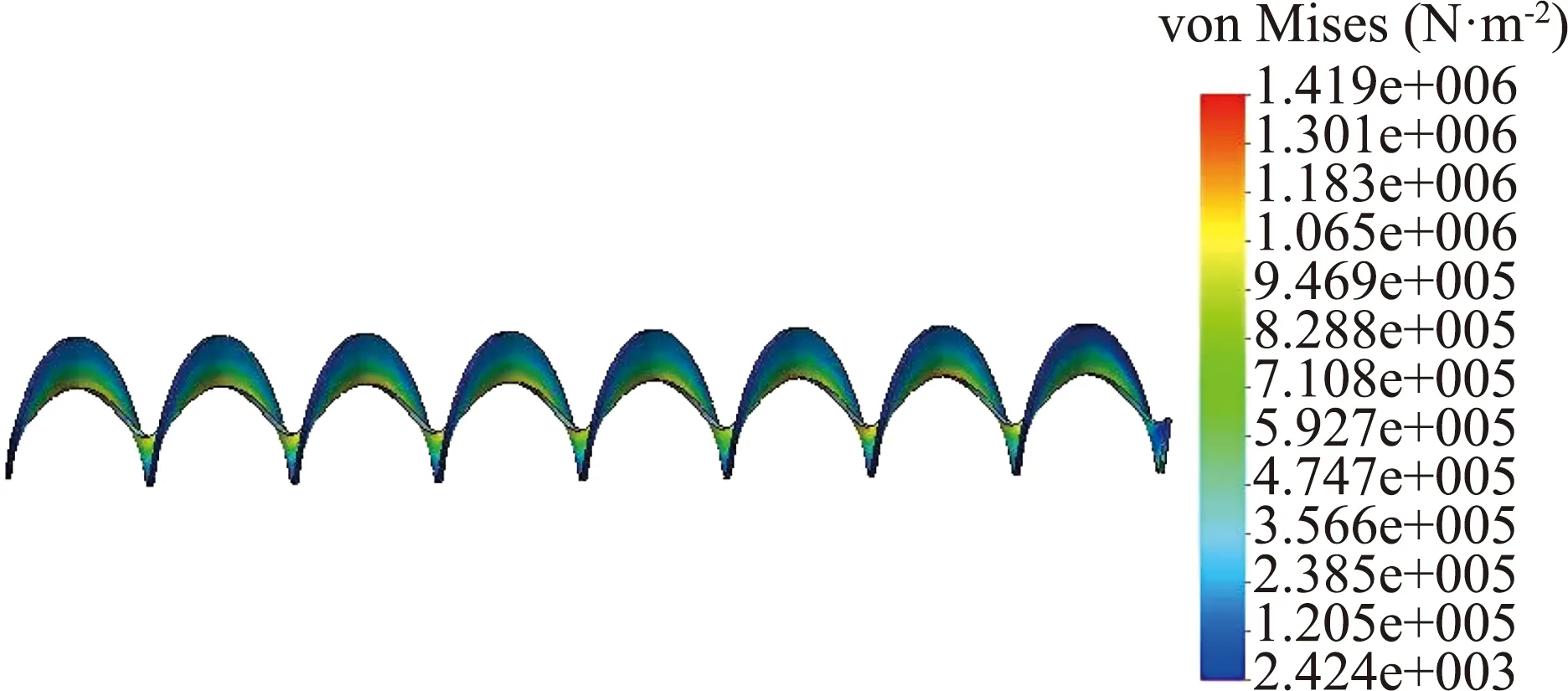
(a) 应力云图
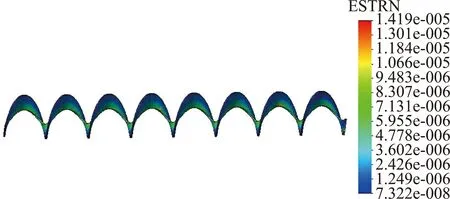
(b) 应变云图图9 螺旋叶扭转工况应力应变等效云图Fig. 9 Stress-strain equivalent cloud image of spiral blade under torsion condition


(a) 应变云图 (b) 位移云图图10 旋转输出轴扭转工况应变位移等效云图Fig. 10 Strain-displacement equivalent cloud image of rotating output shaft under torsion condition
根据式(10)对旋转输出轴进行强度计算,得到旋转输出轴的强度为33.83 MPa,在45#轴的许用扭转切应力[τT](25~45 MPa)范围之内,所以旋转输出轴键槽的强度在工况允许范围内,满足工作性能强度要求。
(10)
式中:τT——旋转输出轴扭转切应力,MPa;
T——旋转输出轴受到的扭矩,N·mm;
WT——旋转输出轴抗扭截面系数,mm3;
n——转速,r/min;
P——传递功率,kW;
d——计算螺旋输出轴直径,mm。
4 样机试验
选用配套动力为90 kW的拖拉机牵引工作幅宽为160 cm的电磁振动螺旋排肥装置,对含水率为30%的粉状有机肥进行单因素试验[10-11],获取排肥机具前进速度、螺旋叶转速、电磁振动频率等试验因素对排肥连续性的影响变化情况。
进行试验前,先通过三点悬挂将排肥机具安装固定在拖拉机上,将有机肥填充到肥料箱。为了避免机具在起步、停止过程中出现加、减速阶段的速度波动,对排肥连续性造成影响,本试验只对机具起步前进20 m后与停车前的20 m之间的区域进行试验样本采集取样;为了减小试验误差,对排肥连续性能的影响,每组试验重复进行3次。
融合甘蔗种植行距1.2~1.4 m,株距75~225 mm等农艺要求,进行有机肥采样标准的划分,当有机肥的排肥距离大于75 mm时,则把该试验样本视为漏施肥样本;当排肥距离小于75 mm时,则把该试验样本视为合格样本,在采集样本时,用卷尺测量取样区间相邻间隔肥料之间的距离,将测量合格的试验样本数据记录。
4.1 单因素试验
根据甘蔗种植生产实际,对排肥装置进行预备试验,来确定排肥机具前进速度、螺旋叶转速、电磁振动频率等试验影响因素对排肥连续性的影响变化范围[12-15],如表1所示。
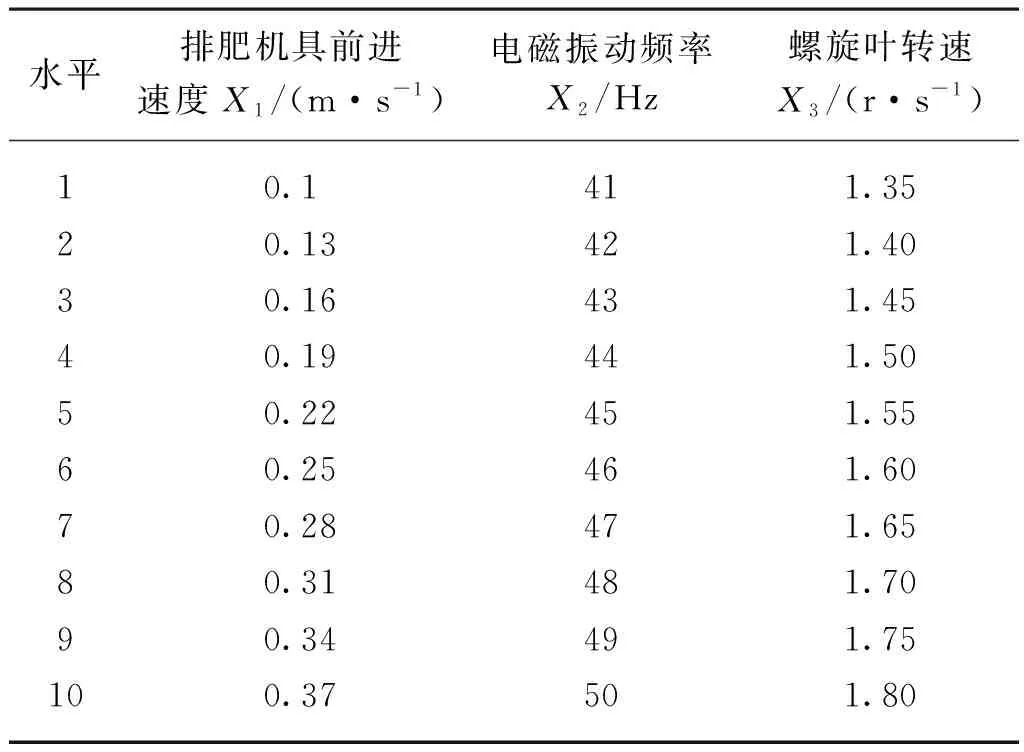
表1 单因素试验影响因素水平范围Tab. 1 Level range of influencing factors in single factor test
根据试验方案中的单因素试验影响变化范围,分别设置排肥装置螺旋叶转速为1.55 r/s,电磁振动频率为45.5 Hz,排肥机具前进速度为0.25 m/s,进行单因素试验分别得到排肥机具前进速度、电磁振动频率、旋转螺旋叶转速与排肥连续性的关系曲线,如图11所示。
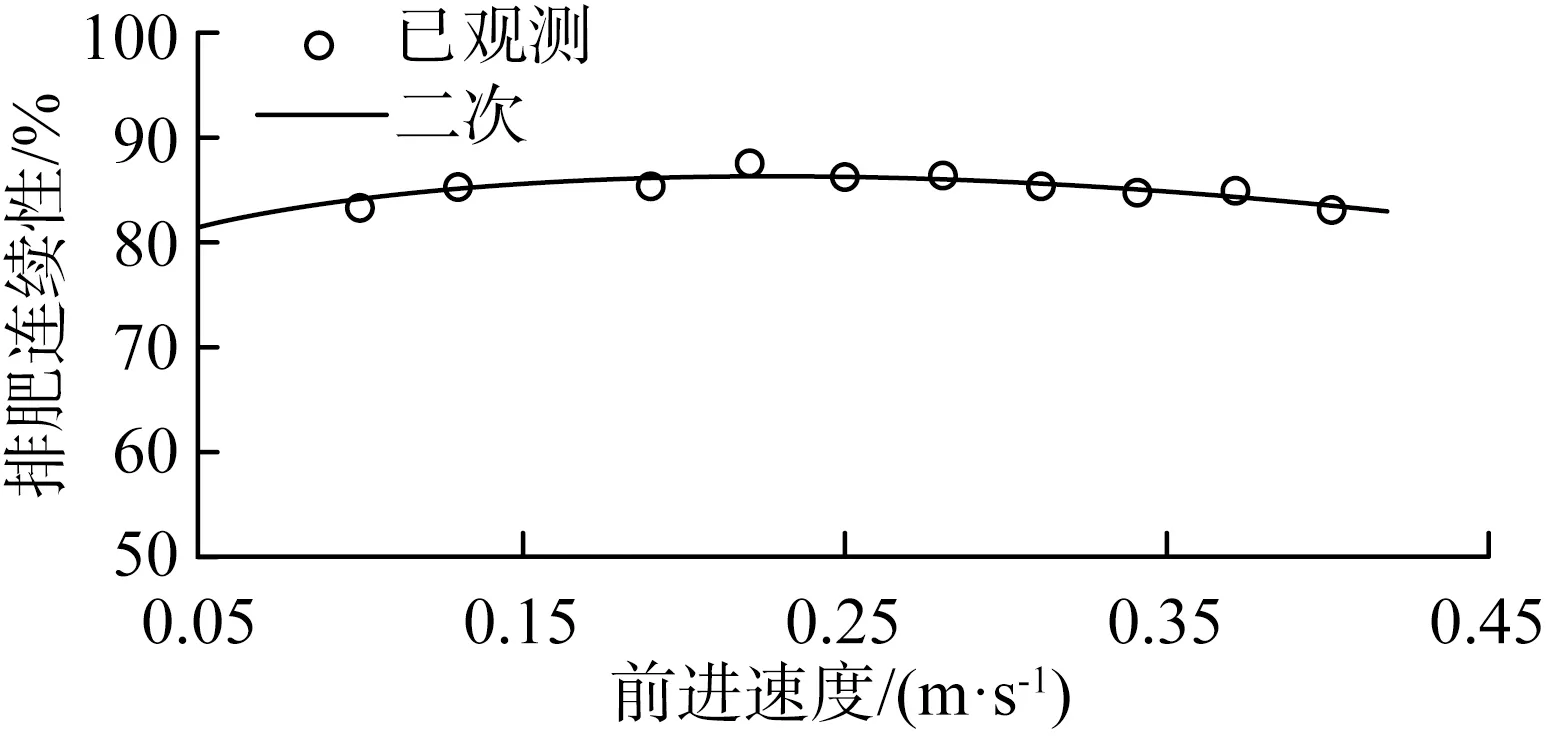
(a) 排肥机具前进速度
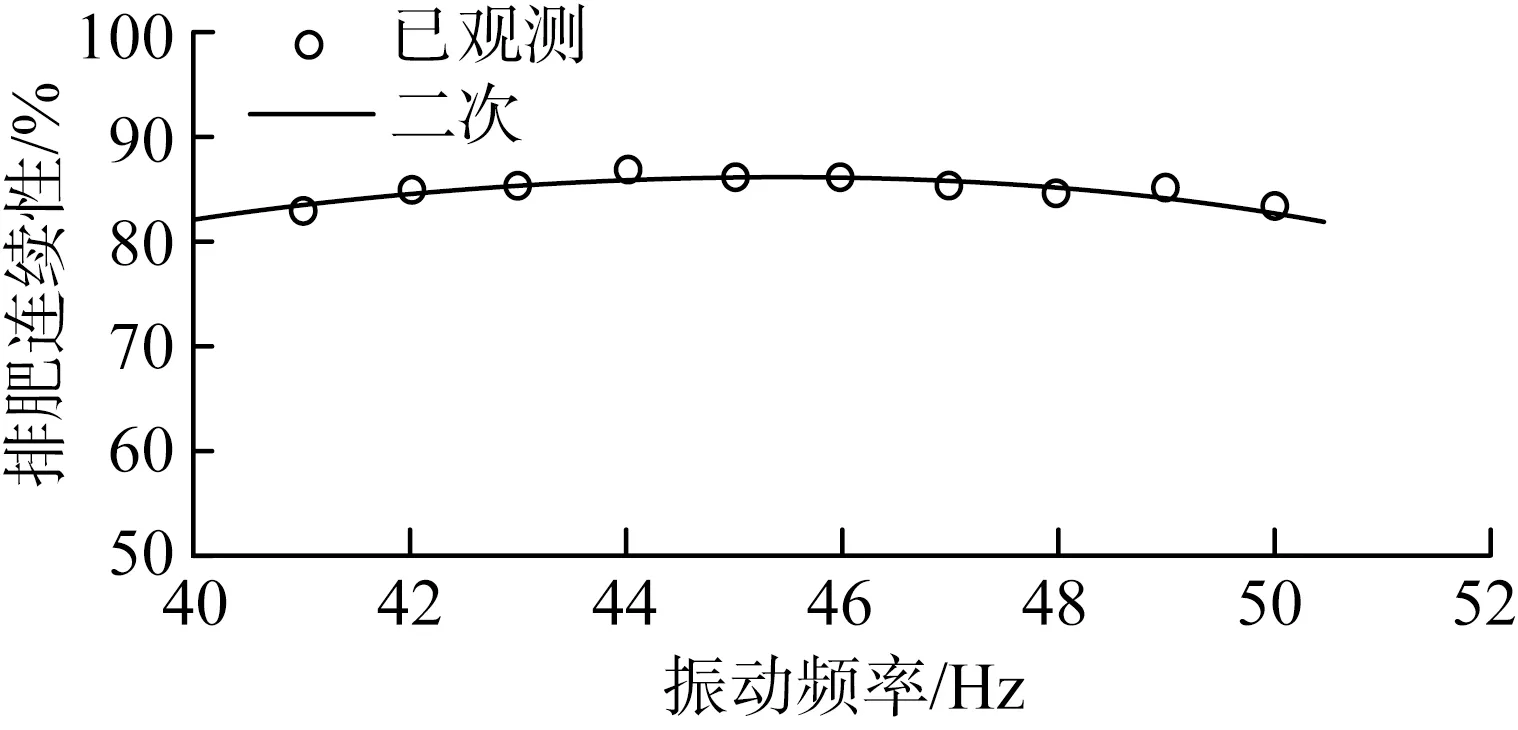
(b) 电磁振动频率
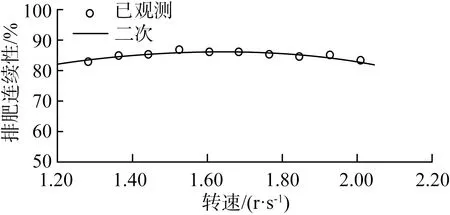
(c) 旋转螺旋叶转速图11 单试验因素与排肥连续性的回归曲线图Fig. 11 Regression curves of single test factors and fertilizer discharge continuity
采用SPSS软件对试验结果进行回归统计分析,建立试验影响因素与排肥连续性的数学模型如下
Y1=-132.165X12+64.697X1+78.39
(11)
Y2=-0.149X22+13.477X2-218.696
(12)
Y3=-59.545X32+186.147X3-59.196
(13)
对以上回归数学模型进行显著性检验可知,P1=0.000<0.05,R12=0.963,P2=0.000<0.05,R22=0.961,P3=0.000<0.05,R32=0.909,表明排肥机具前进速度、电磁振动频率、螺旋叶转速对排肥连续性具有极显著性影响,回归数学模型拟合度较好。
通过上述单因素试验,确定试验影响因素与试验指标的变化范围为:排肥机具前进速度为0.1~0.37 m/s,螺旋叶转速为1.35~1.8 r/s,电磁振动频率为41~50 Hz,排肥连续性均在70%~87%范围内。
4.2 多因素试验
在单因素试验分析的基础结果上,以螺旋叶转速、电磁振动频率、排肥机具前进速度为影响因素,以排肥连续性为试验指标,进行二次回归正交旋转试验[16-18],确定各试验影响因素与排肥连续性之间的定量关系,优化影响排肥连续性因素参数组合。
根据二次回归正交旋转试验的设计进行仿真模拟试验;以各个试验因素取值为自变量,得到以排肥连续性为试验指标的试验结果见表2,方差分析结果见表3。

表2 正交试验结果Tab. 2 Orthogonal test results

表3 排肥连续性二次多项式模型的方差分析Tab. 3 Variance analysis of continuous quadratic polynomial model of fertilizer discharge
对表2中的试验结果,使用Design-Expert软件进行二次回归统计分析,得到排肥机具前进速度、电磁振动频率、螺旋叶转速与排肥连续性的回归数学模型为
y=27.846 05+16.950 23X1+0.889 846X2+
46.470 99X3+0.509 259X1X2-
12.037 04X1X3+0.320 988X2X3-
62.326 39X12-0.017 160X22-17.728 40X32
(14)
由表3可知,回归模型P<0.000 1,表明回归模型高度显著;模型失拟项P>0.05,表明回归模型失拟性不显著拟合程度高。其中排肥机具前进速度的P<0.000 1,对排肥连续性具有极显著影响,电磁振动频率、螺旋叶转速的P值分别为0.042 0和0.000 2,对排肥连续性具有显著影响,试验因素对排肥连续性的影响从大到小依次为排肥机具前进速度、螺旋叶转速、电磁振动频率,模型的决定系数R2为0.988 0与校正决定系数0.972 6均接近于1,变异系数与精密度分别为0.23%和23.38,说明排肥连续性拟合回归模型具有较高的可靠性。
根据回归模型分析结果,绘制试验因素交互效应3D响应曲面图,如图12所示。如图12(a)所示,排肥连续性在83%~87%的变化过程中,随着电磁振动频率增大,有机肥连续排肥率呈现先增后降的趋势;当排肥机具前进速度缓慢增大时,排肥连续率开始慢慢降低;如图12(b)所示,随着螺旋叶转速的增大,排肥连续率呈现先增后降的趋势,当排肥机具前进速度增大时,排肥连续率持续降低;如图12(c)所示,排肥连续率随着电磁振动频率与螺旋叶转速的增大,呈现先增后降的趋势;基于交互效应分析可知,排肥机具前进速度一定时,螺旋叶转速与电磁振动频率增大时,排肥连续性效果显著。
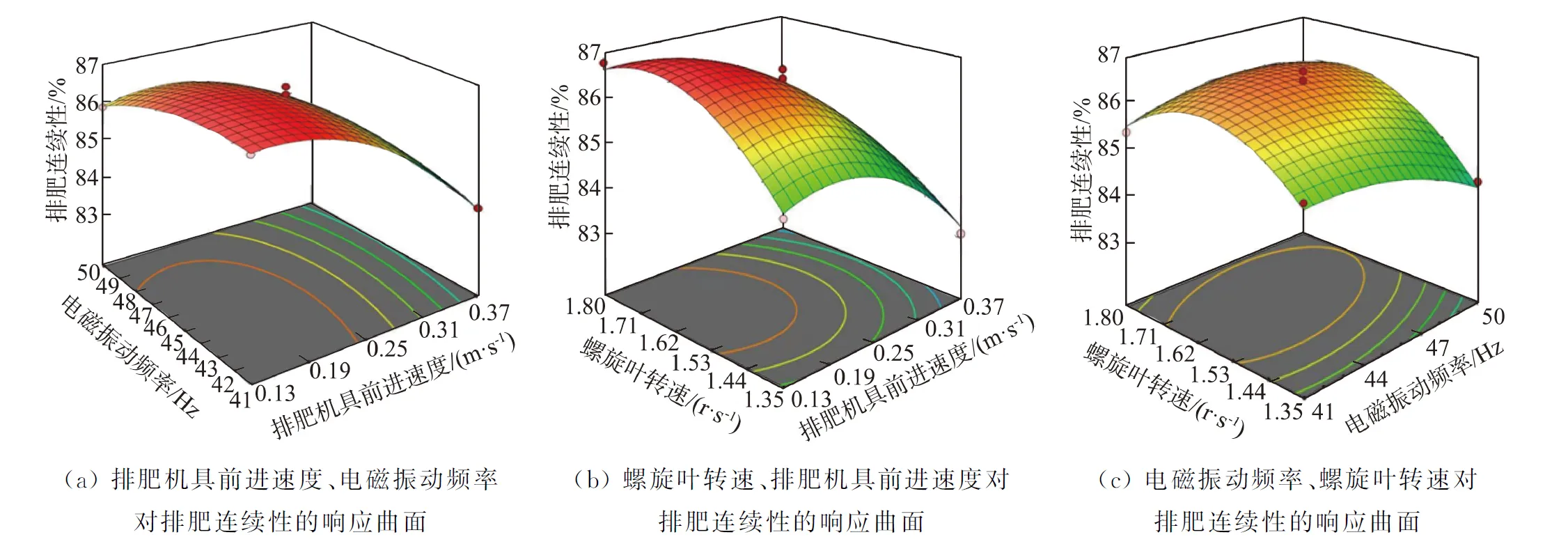
图12 交互效应响应曲面Fig. 12 Interaction effect response surface
4.3 参数优化
为了进一步检验最优参数组合的可靠性,将排肥装置与拖拉机通过三点悬挂形式固定连接在一起,进行田间试验,检验排肥作业连续性能;以排肥连续性为优化目标,结合规划约束条件,运用Matlab数学软件对回归方程数学模型进行参数优化[19-22]。优化求解的最终结果为:排肥机具前进速度为0.25 m/s,电磁振动频率为45.5 Hz,旋转螺旋叶转速为1.55 r/s,此时排肥连续性为86.42%。
其中规划约束条件为
(15)
在最优排肥参数组合的条件下,以排肥连续性为试验指标开展田间验证试验[23-24]。得到的5组排肥连续性田间试验结果分别为86.1%、86.6%、85.7%、86.4%、85.9%;通过计算得到排肥连续性的平均值为86.14%,相对于理论优化结果86.42%,其相对误差为0.28%,在相对误差10%的范围之内,表明优化结果可靠;说明该排肥装置在排肥过程中,达到有机肥连续排肥性能的作业要求。
5 结论
1) 结合现阶段螺旋式有机肥施肥机存在的主要问题是料箱肥料结拱、排肥不均匀、效率低等问题。本文融合有机肥含水率高、黏性大、易结拱等特性,在螺旋排肥装置的基础上,以电磁振动梳理单元为切入点,设计了甘蔗种植电磁振动螺旋排肥装置。
2) 运用Jenike理论,结合肥料结拱临界条件,计算螺旋圆形排肥口的尺寸B≥180 mm;通过有机肥颗粒静止临界条件,计算旋转螺旋叶最低转速为80 r/min;运用柱坐标系对在导肥槽导肥板上的有机肥颗粒群体进行受力分析,得到导肥槽倾斜面的最小倾角为40°;通过simulation的连续体离散化方法,对模型进行网格划分,结合螺旋叶受力分析,进行外载荷添加,进行静力学分析,检验螺旋输出轴与螺旋叶的强度,在工况允许范围内,满足工作性能强度要求。
3) 通过对该排肥装置进行单因素、多因素试验,运用Spss、Design-Expert软件对试验结果进行分析,确定各试验因素对排肥连续性的影响变化范围;建立回归数学模型,进行优化分析,得到影响排肥连续性的最优参数组合为:排肥机具前进速度为0.25 m/s,电磁振动频率为45.5 Hz,螺旋叶转速为1.55 r/s,排肥连续性为86.14%。
4) 遇到复杂的田间作业环境时,仅仅通过调节电磁振动频率、螺旋叶转速、排肥机具前进速度等试验影响因素,排肥装置作业时还会出现肥料结拱、排肥不连续的现象,因此就如何在电磁螺旋器排肥过程中出现间断排肥还需要进一步研究,本试验为后续有机肥连续均匀排肥装置的优化设计提供了依据。
猜你喜欢
蜜蜂杂志(2021年10期)2021-12-06
蜜蜂杂志(2021年11期)2021-02-18
数学年刊A辑(中文版)(2020年2期)2020-07-25
新世纪智能(语文备考)(2019年12期)2020-01-13
中国生物医学工程学报(2019年4期)2019-07-16
铁道通信信号(2018年11期)2019-01-19
中学生数理化(高中版.高二数学)(2017年1期)2017-04-16
厦门理工学院学报(2016年1期)2016-12-01
中学生数理化·七年级数学人教版(2016年4期)2016-11-19
新农业(2016年14期)2016-08-16
