基于网络云的船舶机舱多人协作训练评估系统
2023-11-02 12:33徐飞翔卢佳音林叶锦石泽宇赵思博
计算机应用与软件 2023年10期
徐飞翔 卢佳音 林叶锦 石泽宇 赵思博
1(大连海事大学 辽宁 大连 116026)
2(大连海智科技有限公司 辽宁 大连 116026)
0 引 言
《STCW公约马尼拉修正案履约指南》做出了公约附则条款的强制性标准,从机舱轮机员与管理工作方面,对工作计划、人员协调、时间、顺序安排上有了严格要求,并要求通过轮机部门多人协作实操,完成有效的机舱资源管理[1]。然而,用传统的轮机模拟器培训时,具有训练模式单一,训练受到时间、区域限制,训练者缺乏情景意识和不能以团队协作方式训练等问题。
文献[2]开发了基于帧同步网络模型的多人协作轮机虚拟实验室,可进行多人异地协同操作,主要基于MIMIC屏和控制箱完成系统的训练操作,系统缺乏三维动态模拟效果。文献[3]依据船舶舵机原理建立了舵机数学逻辑模型,并将其融入到三维仿真系统中,且实现了虚拟舵机室中舵机的交互操作,训练操作场景只包括舵机室。系统的开发主要为了拓宽虚拟现实技术在不同船型的不同舱室中的应用。文献[4]为满足机舱资源管理评估的特殊需求,提出了基于驾机联动的任务型协作训练模式和基于遗传算法优化的机舱协作智能评估方法。建立不同需求下的优化目标函数,采用熵权法和历史评估数据调整指标的权重,经多重模糊综合评判得出结果。最后让高级轮机员在局域网环境下,使用该系统进行训练效果验证。文献[5]针对传统机舱训练评估方法不能反映团队内部协作性问题,结合了基于层次分析法的模糊综合评价方法和Dice、Tversky集合相似度系数,对团队任务完成度和协作能力进行评估,这种协作式评估方法可以体现团队协作性存在的细节问题。文献[6]开发了基于互联网的三维虚拟实验室,实现了第一人称视角漫游及基本的模拟操作。系统中仅有主机虚拟模型,不利于训练者的机舱情景意识的形成和实践技能的提升。文献[7]通过德尔菲法得到评判的最初云滴,利用逆向云发生器生成原始评价权重云,然后构建评价云矩阵,并进一步计算各评价因子的云权重。最后通过三个相关示例验证了云模型理论引入模糊综合评价方法中的有效性。
机舱轮机管理工作中实践技能和团队合作是重要部分。轮机操作和突发事件的处理体现了高级轮机员的反应能力,但这种能力并不是与生俱来的,而更多的是通过后天学习和训练的结果。机舱操作任务具有种类多元、步骤复杂、模式分化的特点,航海类学生使用传统培训方式接受任务实操训练受到时间、空间和教学成本的限制[8],而在协作虚拟环境中进行模拟操作,可有效培养航海类学生机舱情景意识和团队合作意识,提升学生对突发紧急事件的应对处理能力。为此本文开发了基于网络云的船舶机舱多人协作训练评估系统,网络云为轮机全任务多角色协作培训提出了一条新途径。在云训练模式下,每个用户经由网络向数据库上传虚拟交互数据,数据库中数理模型进行数据计算和图形处理任务后,将运算后的结果数据发送给用户,即完成多人协作虚拟操作任务。最后系统采用基于熵权法的模糊综合评估方法对学生的学习效果进行评估考核,并显示评估指标和对应的实际数据值。
1 系统总体框架结构
综合运用虚拟仿真技术,以VLCC油轮为虚拟对象构建高逼真度的虚拟机舱场景,多名训练者可同时在共享协作虚拟场景中进行轮机任务协作训练,在故障、安全事件模拟情景中提升故障诊断和应变处理能力,这对于解决在机舱中由于人为误操作引起的安全事故,突发紧急重大事故不可重现、不可逆,拓展轮机理论知识深度与广度,提高机舱高危事件教学效果,锻炼航海类学生实操和应急能力等意义重大[3]。基于网络云的船舶机舱多人协作训练评估系统的框架如图1所示。
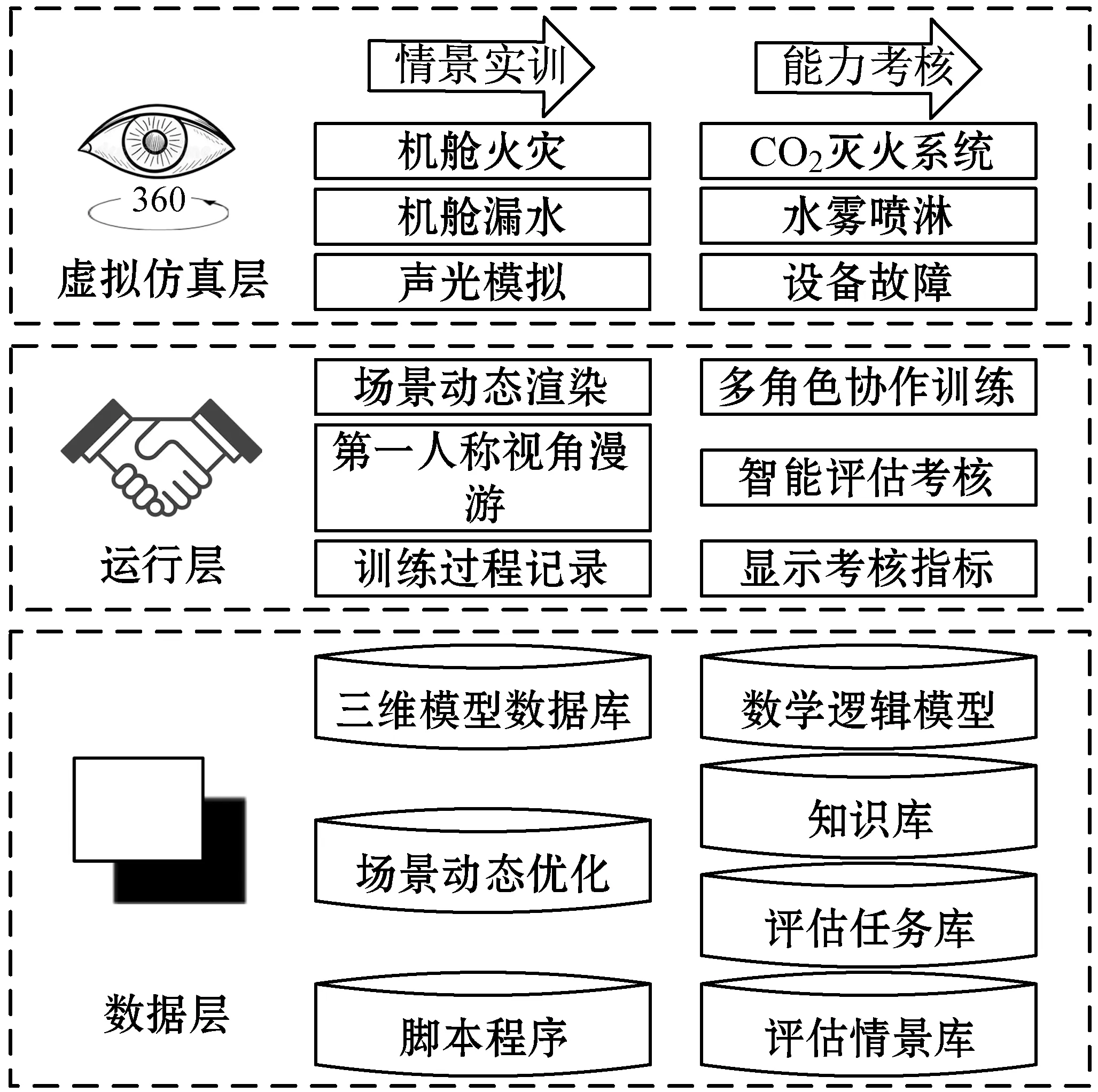
图1 船舶机舱多人协作训练评估系统框架设计
(1) 数据层。数据层用于存放和管理仿真系统中的各种数据,并完成数据的运行处理,是系统的灵魂部分。主要包括三维模型数据库、场景动态优化、程序脚本、数学逻辑模型、知识库、评估任务库、评估情景库。
(2) 运行层。运行层主要包括场景动态渲染、第一人称视角漫游、训练过程记录、多角色协作训练、智能评估考核、显示考核指标。系统运行时,训练者通过程序接口从数据层中读取和往数据层中写入训练过程记录数据、多角色协作训练数据、智能评估数据和考核指标数据,这部分数据的读取和写入功能由运行层完成。
(3) 虚拟仿真层。虚拟仿真层主要包括机舱火灾、机舱漏水、声光模拟、CO2灭火系统、水雾喷淋、设备故障。虚拟仿真层为训练者提供了多种高拟真度的机舱重大故障现象情境,训练者可以在虚拟环境中进行学习、实操练习和综合测试。
2 关键技术
2.1 三维视景设计与实现
三维视景设计信息流程如图2所示。首先创建高精度的模型,渲染烘焙所需贴图,用于让模型呈现更贴近实物的细节。制作火灾、细水雾喷淋、漏水等特效模拟机舱突发紧急情景。分析轮机设备工作原理,利用Maya制作其工作动画。编写脚本实现虚拟交互体的动作或显示功能。虚拟场景效果如图3所示。

图3 虚拟场景效果
(1) 场景搭建与视景优化。本文用3ds MAX创建机舱结构、设备高精度模型,采用纹理映射、UV展开贴图、环境光遮蔽(AO)等方式渲染烘焙输出材质贴图,用于提高模型表面细节和增强光影效果,从而增强沉浸感。使用细节层次控制技术(LOD),根据虚拟人物与模型距离和人物视角信息决定使用不同精度细节模型[9]。采用Drawcall优化算法,同类对象附贴同一种材质,通过批处理技术减少所渲染物体的材质种类。通过视景优化提升系统运行的流畅度。
(2) 机舱紧急情景及故障情景的实现。机舱紧急情景被开发出来。借助Unity3D自带粒子系统,进行机舱漏水、火灾、细水雾喷淋效果的动态模拟。火灾位置在发电柴油机、主机、分油机、焚烧炉、辅锅炉等设备处,火灾场景包括了起火、火势蔓延、轰然、持续燃烧及逐渐熄灭等阶段,通过故障设置后,机舱中模拟发生火灾[10]。同时动态模拟了细水雾喷淋场景,细水雾喷淋过程包括喷头喷水、喷头水雾化、雾化水吸热及冷却灭火[11]。在细水雾喷淋持续灭火作用下,火势逐渐减小直到火熄灭。通过漏水故障设置,机舱固定位置出现室内漏水现象,且水位逐渐升高。在虚拟场景中模拟紧急情景是理论知识的深入拓展,以这种形式代替展示实船中不可模仿的场景,帮助没有实船经验的航海类学生“零距离”学习机舱火灾、漏水、细水雾喷淋灭火,提升学生紧急事故的情景意识和对突发安全事件应急处理能力。
(3) UI交互界面设计。虚拟机舱是一个整体的虚拟场景,又以分布式场景进行布局。本文利用UGUI图形用户界面系统设计了系统的主菜单,如图4所示。系统运行后,通过选择不同的分场景,系统加载选择的场景模型,人物视角切换到指定场景中,实现不同舱室场景之间的快速切换。
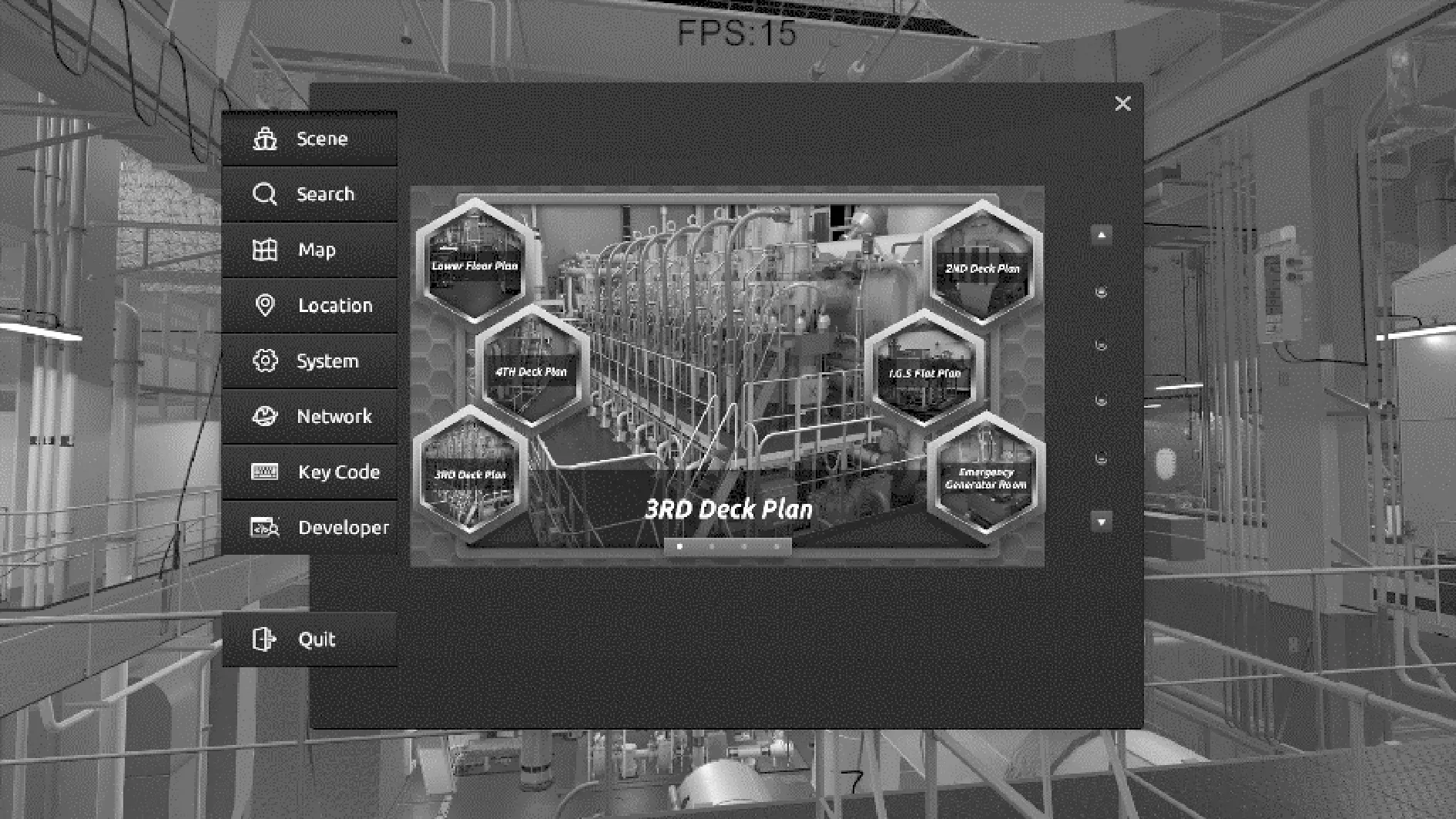
图4 系统主菜单界面
机舱操作流程复杂,交互对象数量庞大且外形相似,对航海类学生或经验不足的培训人员来说,训练时不好区分要操作的交互对象,为此本文利用UGUI图形技术设计了HUD系统以提供良好辅助操纵体验。根据机舱设备详细技术数据,HUD中配置相应的信息,满足培训人员的学习和使用需求。HUD系统的框架如图5所示,包括数据处理模块、显示模块、人机交互模块。经数理模型计算后返回的数据传入数据处理模块,当数据处理计算后,被分发到显示模块。显示模块是一个UI矩形界面,用于显示HUD、设备技术参数及交互对象信息。人机交互模块可以提供不同视角的UI界面,当没有被激活时,UI界面处于隐藏状态。当交互点被检测到交互后,显示交互点详细数据信息和状态参数。HUD显示器效果如图6所示。

图6 HUD显示器效果图
(4) 动画设计。针对机舱设备的繁琐复杂动作过程,难以使用常规仿真技术实现,可以通过三维动画的方式直观地展示出来。首先使用Maya软件创建设备模型,分析设备运动原理后,制作动画的关键帧,指定对象在特定时间内的属性值[12],从而完成设备连续动作动画的制作。然后通过程序脚本控制动画,模拟设备在不同工况下的工作过程。采用三维动画方式展示工作过程的设备主要有船舶主机、发电机、速闭阀、液压泵等。动画模拟方式可以展示工作过程和细节,把枯燥的理论知识生动地展示出来,能够有效地辅助航海类学生对设备工作原理和不同工况下设备状态特点的深入理解,使学生牢牢地掌握轮机原理知识。
(5) 人机交互技术。虚拟机舱交互点数量庞大,为方便管理和节约系统开发资源和成本。首先对模型功能需求进行分析,把相同属性、相同功能的模型划分为一类。再为不同模型行为功能设计各自的行为模型,并用C#语言编写脚本生成通用组件行为模型,实现模型行为的控制。根据实体模型属性选择对应的组件行为模型,并配置不同参数。当虚拟角色通过鼠标、键盘等输入设备交互操作调用请求函数后,实体模型配置的组件行为模块会接收来自数理模型的变量数据,通过调用行为模型中执行函数来控制实体模型的相关动作[13]。
2.2 虚拟人技术
虚拟人物功能的实现包括虚拟人物模型的搭建和行为动作的实现。其主要分为角色模型的建立、人体骨架的搭建、蒙皮绑定、贴图渲染、动画制作和动作控制几个主要部分。选用3ds MAX软件建立场景中虚拟角色模型。创建虚拟角色网络模型和骨骼模型,并将蒙皮和骨骼绑定,完成人物模型构建后[12],通过控制骨骼关节旋转和移动实现虚拟人动作动画显示。本文采用反动力学技术对人物关节进行仿真,以提高对虚拟人物的更高精度的模拟操作。连接着的骨骼关节间夹角为θ,末端骨骼节点位置为X,关系式如下:
θ=f-1(X)
(1)
当操作虚拟人物时,在反向动力学技术作用下,通过IK求解器实现模拟控制虚拟人物的行为动作,然后IK求解器通过改变IK控制柄位置的旋转和平移来实现IK链中对应骨骼关节的移动和旋转,其中IK控制柄是指骨骼起始关节点和末关节点的向量。
图7为人物动作过程的IK控制柄求解流程,图7(a)为初始动作时骨骼状态,当子骨骼BC发生旋转,控制柄向量变为AD,图7(b)为动作更新后的骨骼状态,β表示控制柄向量AC转动的角度,求解如下:

(a) (b) (c)图7 IK控制柄求解流程
cosβ=AC·AD/(|AC|×|AD|)
(2)
当AB父骨骼最后朝反方向旋转β角度后,子骨骼跟随着一起动作,AC向量和AD向量重合,图7(c)为更新后的骨骼状态。基于反向动力学,部分虚拟人动作效果如图8所示。

图8 虚拟人动作
3 通信结构设计
网络云多人协作训练评估系统通信架构如图9所示,系统以数据库服务器、知识库服务器、情景库服务器等为中心,以太网作为关联桥梁,通过数据传输实现多用户联动。仿真系统中包含有知识库、评估情景库和评估任务库。针对评估任务内容,评估任务库中提前内嵌状态参数文件。当训练者选择训练或评估任务后,系统自动加载预嵌入的相关系统参数,训练者在此基础上完成训练或考核任务即可。训练或者评估具有单一或多人协作两种模式,多人协作模式模仿远洋船舶四名轮机员协作完成实际操作的方式。基于以太网的数据传递方式进行多人协作评估时,PC1、PC2、PC3和PC4四名学员实际操作数据均通过以太网发送到服务器,经过服务器运算后的数据反馈给四位学员仿真系统中,使四名学员虚拟场景中各操作状态保持一致,共同完成评估任务。

图9 网络云多人协作训练评估系统通信架构
4 多人协同操作考评系统
4.1 多人协作训练评估原理
如图10所示,基于网络云的多人协作训练评估系统流程步骤如下:运行系统并初始化,然后选择一个虚拟角色登入系统,系统判断用户是否载入系统,是则登入系统,可以进行下一项工作,否则中止考评;然后选择具体的考评任务进行虚拟操作;其他协同操作人员发出加入系统请求,被允许进入系统后,多人在同一系统中协同完成操作。选择完具体考评任务后,系统根据考评项目内容自动加载预制状态参数;用户按照角色职责做与角色匹配的项目操作,在完成了考评项目后,按结束考评按钮,用户在虚拟场景中虚拟训练结果会记录在数据库中。系统考评模型根据实操后获得的参数数据,结合操作变量与数据的匹配度、变量数值和操作步骤顺序,利用熵值法估算评价指标权重向量,再利用模糊数学的模糊矩阵合成算子,得到综合评估得分。最后,系统给出考评分数结果、考评指标具体参数值和正常值范围。
4.2 评价模型建立
1856年,德国物理学家道夫·克劳休斯首次提出熵的概念。熵在热力学中表征物质状态的参量之一,是体系混乱程度的度量。而在信息论中,信息熵是系统无序程度的度量,信息是有序程度的度量,二者绝对值相等,符号相反。熵权法就是根据各项指标的信息熵来计算各个指标权重,熵权值代表着各指标在竞争意义上的相对激烈程度,具有较强的客观性[14]。本文采用基于熵权法的模糊综合评价方法,首先根据熵权法来确定各个评价指标权重,然后建立模糊关系评判矩阵,最后利用模糊数学的模糊矩阵合成算子,得到综合评判集。具体可分为以下5个步骤。
1) 假设m个评价对象集V={v1,v2,…,vm},有n个评价指标集X={x1,x2,…,xn},其中xij为第i个评价对象第j个指标的最初数值,对其标准化处理后得到评价标准矩阵Y见式(3),矩阵中元素值按式(4)计算:
(3)
(4)
2) 任一评价指标的熵值hj按式(5)计算,其中k为调节系数,与系统评价对象数量有关,k=1/lnm。
(5)
3) 熵权法利用指标信息熵来估算评价指标权重,该指标提供信息量越多,其在综合评价中作用越强,所占权重越大。第j个指标权重wj计算如下:
(6)
4) 将m个评价对象和n个评价指标之间的对应关系通过构建模糊关系评判矩阵表示:
(7)
5) 利用模糊数学的模糊矩阵合成算子,得到综合评判集如下:
B=w∘R
(8)
5 实验结果
5.1 评估结果
选取40名航海类学生,随机分成10个由4人组成的团队。每个团队分别协同操作考评,为了方便数据分析,本文让10个团队完成相同的任务。船舶运营过程中,离港备车是常规协作且最基本的评估情景之一。其中发电机并车操作是很重要的一个子环节,为后续的备车操作提供重要基础。本文选择发电机的手动并车操作任务,每个团队协同完成任务后,获得了相关参数数据,组成了评估指标集,评估指标集包括完成任务时间、频率差值、电压差值、相位差、电压、频率和同步表状态7个指标,用评估指标集X表示:
X={x1,x2,…,x7}
(9)
10个团队完成发电机手动同步并车考评任务后,各个评估指标数据如表1所示。
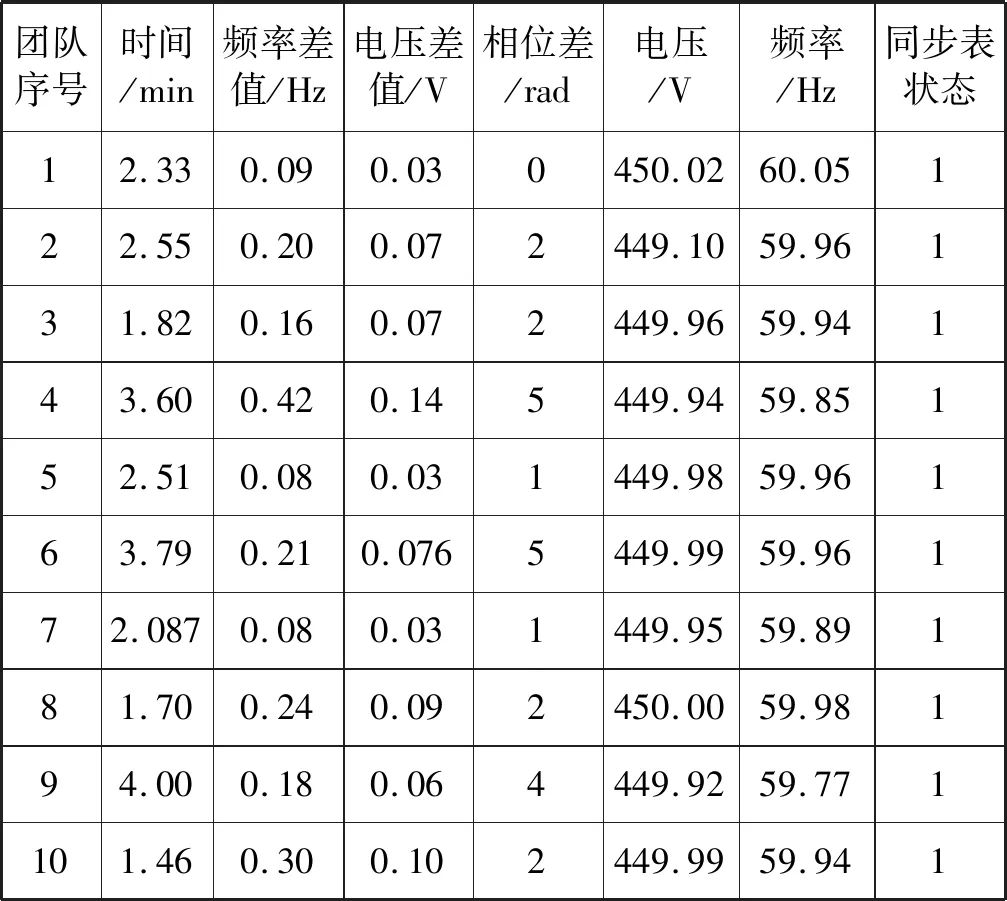
表1 评估指标数据
5.2 评估结果分析
本系统基于熵权法的模糊评估对团队操作结果进行评估打分。首先基于熵权法估算发电机手动同步并车评价指标权重,结果如表2所示。结合评价指标权重,系统通过模糊综合评价,得到最终的分数。此外请5位相关领域专家对10个团队操作结果进行人工评估打分。系统自动评估和专家人工评估的分数如表3所示。

表2 评估指标权重
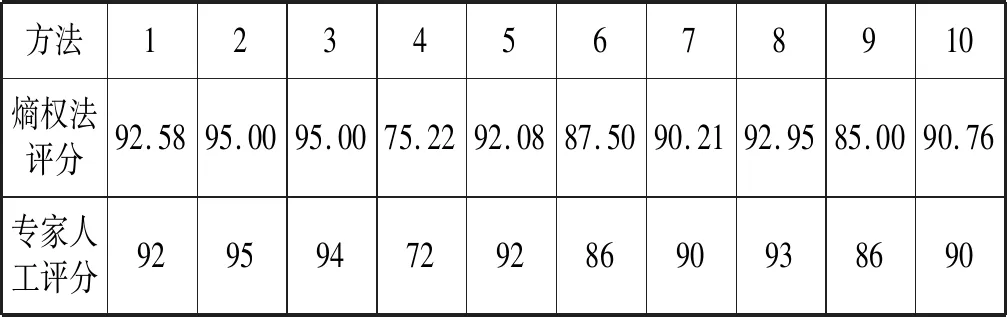
表3 系统自动评估和专家人工评估的分数
本文基于熵权法的模糊综合评估和专家评估方法得到的结果对比如图11所示,系统给出评估结果样例如图12所示。本文系统评估结果和专家的结果误差很小,两种结果最大误差为4.28百分点,最小误差为0.08百分点,系统评估结果达到了和专家评估一样的精度,同时也得到专家们的一致认可。调查访问参加考评的学生表示经过训练考评后,他们的协作实操能力和团队合作意识有了大幅提升,对他们以后工作有很大的帮助。

图11 两种方法的评估结果对比
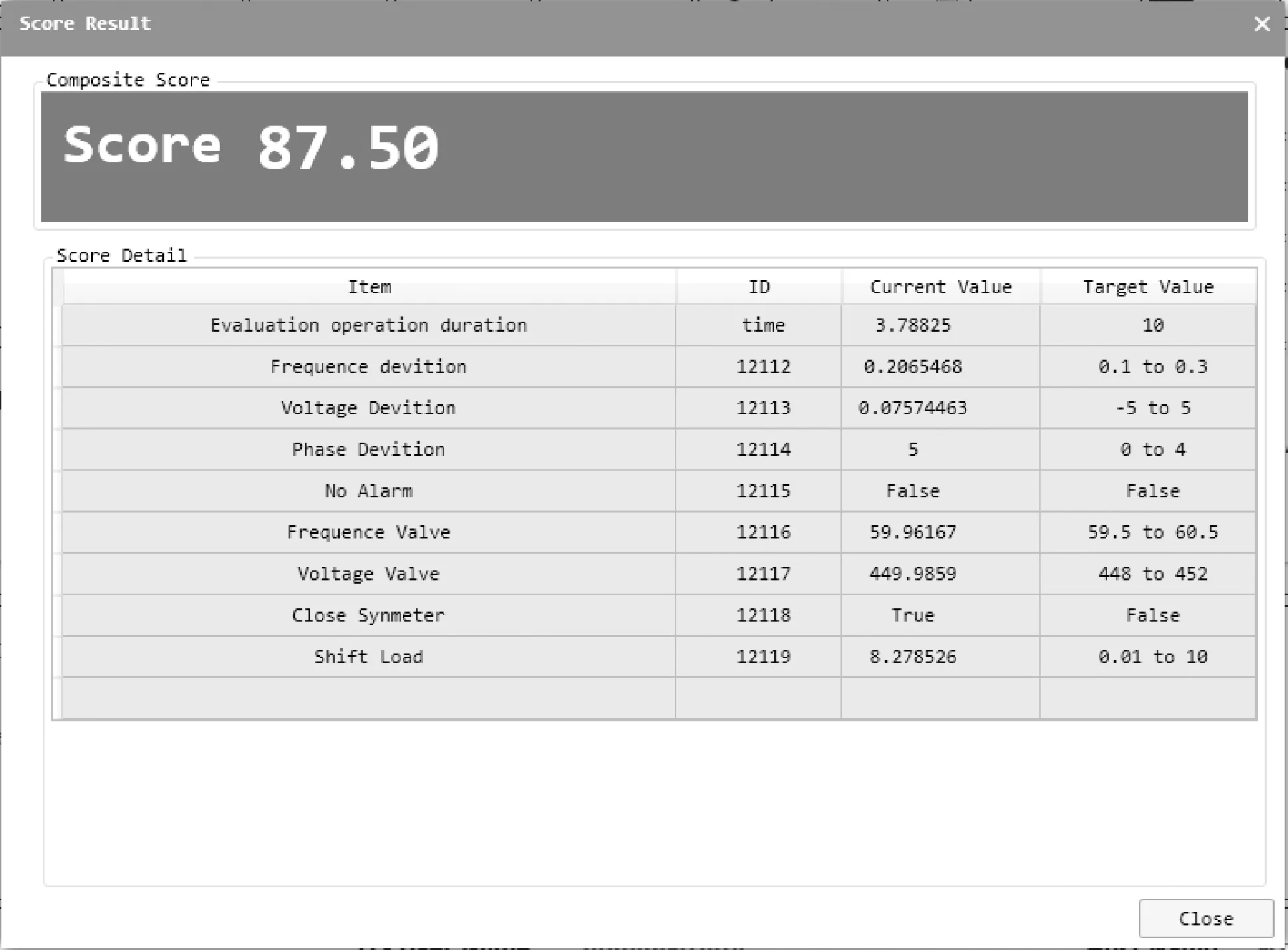
图12 本系统评估结果
熵权法计算权重的过程中,权重分配时克服了人为赋值引起的主观误差,极大程度降低了人为干预的影响,保证了评价结果的客观、合理。现阶段该方法只能在确定权重的过程中使用,适用范围有限。
6 结 语
本文开发的基于网络云的多人协作训练评估系统,为训练者提供了一个贴近实船的虚拟共享三维环境。只要有网络,就可以实现在这个共享的三维环境中,多人可同时在线远程学习、远程训练和远程考评操作。此外利用虚拟现实技术,系统中融入了机舱火灾、机舱漏水等紧急情景,辅助没有实船经验的学生深刻理解实船无法演示的故障现象,提升学生的紧急情景应对能力。最后可以通过模糊综合评估方法对学员的学习效果进行客观评估,同时请5位专家对这评估结果进行了对比,表明本系统评估方法与专家评估方法计算出的结果高度一致,也得到了专家的一致认可。基于网络云的多人协作训练评估系统旨在提供一个“训练-评估”的多人在线协同学习、考评平台,改变了传统船员考试模式,提高了航海类教学质量,也增强了航海类学生的协作能力和团队的合作意识。
猜你喜欢
水上消防(2022年2期)2022-07-22
水上消防(2021年3期)2021-08-21
水上消防(2020年5期)2020-12-14
作文成功之路·小学版(2019年8期)2019-09-18
读者(2017年14期)2017-06-27
读写算(下)(2016年9期)2016-02-27
船舶标准化工程师(2015年5期)2015-12-03
质量与标准化(2015年9期)2015-07-10
电子工业专用设备(2015年4期)2015-05-26
浙江人大(2014年5期)2014-03-20