无人智能中药柜系统设计
2023-11-02 12:34谢观义刘宝华
计算机应用与软件 2023年10期
谢观义 张 浩 刘宝华
(燕山大学机械工程学院 河北 秦皇岛 066004)
(燕山大学河北省并联机器人与机电系统重点实验室 河北 秦皇岛 066004)
0 引 言
目前,国内的中药柜存在以下几点问题:中医为病人抓取中药的效率低,常常让病人等待很长的时间[1],造成了病人对于医疗服务的体验感差;传统中药的存储管理方式不当,导致很多中药材药性流失,从而造成了一些不必要的浪费[2];另外,对于药材的存储量,使用记录以及存放年限在实际工作中往往缺少监管[3],对药品的管理造成了不必要的麻烦;在药房的取药、管理药品、出售药品这一连串流程中需要比较多的人力资源,人力成本过高。故本文设计了一种无人智能中药柜管理系统,较为完美地解决了以上这些问题。
1 无人智能中药柜系统业务流程分析
无人智能中药柜管理系统是一套通过计算机技术、智能控制技术、信息化技术和自动控制技术与控制设备,检测设备以及计算机进行无缝对接,从而实现药品的管理、存储、分配和监控并向智能化以及自动化方向进行发展。无人智能药柜管理系统自动根据患者医嘱和处方进行抓药,并传送药品到患者手中。
在传统的业务模式下,药品的流转过程是从医生下医嘱开始,随后护士进行医嘱的转抄,再发到药剂科的药品管理系统,药剂师根据医嘱进行抓药,再分时分批配送到病区,最后由护士根据配送单把药品分发到患者的手中。在这种模式下,药剂师抓药和配送具有一定的延时性。护士对于医嘱的转抄具有一定的抄错风险,并且在药品加急和退药的过程中加重了药剂科的工作负担和处理风险。
无人智能中药柜管理系统的使用,使得这一传统的药品分发模式得到改变,成为一种智能的分发模式。在这种模式下,药剂科可以实时掌握智能药柜内的药品库存以及药品的使用记录,药材年限和药品的存储温湿度、药品的运送状态、运送位置。无人智能药柜系统设计的业务流程如下:
(1) 对每一种药材进行编号,将药材按从左往右从上往下的顺序依次放入药柜中。
(2) 患者通过手机App上位机软件对就诊时间进行预约。
(3) 病人就诊完成后,中医在计算机端开完处方发送到药柜端,药柜管理系统根据药柜编码找到该药柜的抽屉端。二维平面定位系统自动定位到所指定药柜的抽屉端,同时抽屉端的电磁铁门打开并控制抽屉中的步进电机转动,带动摆杆将药物通过一个小孔推送到传送带上,同时使用压力传感器实时测量药物的重量,当推送出的药物重量达到处方所规定的药物重量时,则步进电机停止转动并关闭电磁铁门。
(4) 传送带上的药材通过全自动打包机进行打包处理。
(5) 打包完成后,药品通过传送带传送到柜台上。
(6) 抓药成功后,计算机端会收到反馈信息并将抓药记录上传至数据库中保存,同时控制打印机打印处方清单。
无人智能中药柜的应用,减少了药剂科和护士的工作量,保证药品使用的安全、有效、经济、适当[4],同时减少了病人的等待时间和抓药师抓药时出错的概率和风险。
2 智能中药柜系统概念模型
2.1 智能中药柜系统的结构组成
智能中药柜系统的组成可以分为硬件部分和软件部分。
2.1.1硬件部分
智能中药柜系统采用以STM32F407ZGT6芯片作为单片机的主控芯片,结合步进电机、涡轮减速机、同步带、同步轮、编码器、传送带、自动打包机、压力传感器、温湿度传感器、Wi-Fi模块、蜂鸣器、继电器、电磁锁控制技术等外围设备组合而成。
药柜中的每个抽屉均采用STM32单片机作为主控制器。每个抽屉内放入一种药材,其底部安装有压力传感器,顶部有温湿度传感器和蜂鸣器。
二维平面定位系统采用STM32单片机作为主控制器,结合步进电机、涡轮减速机、同步带、同步轮、编码器、传送带、继电器、变压器等设备组合而成。
2.1.2软件部分
下位机运用Keil uVision5软件使用汇编及C语言混合编写运行在STM32单片机上。
上位机运用Visual Studio 2019软件使用C#语言编写计算机上位机软件运行在计算机上。运用Eclipse软件使用Android语言编写手机App上位机软件运行在手机上。
2.2 系统功能设计
无人智能药柜系统的功能设计可以分为硬件功能设计和软件功能设计。
2.2.1硬件功能设计
该系统的硬件功能是通过主控芯片连接其他控制模块实现的。智能中药柜控制系统原理,如图1所示。
Wi-Fi模块可以实现STM32单片机与计算机之间的数据信息交互,使单片机能够控制电磁锁的开启和关闭,并将压力传感器、温湿度传感器的数据信息发送到计算机上。
每个抽屉的后面都安装有电磁铁门,只有当相应的抽屉接收到指令时,才会打开电磁铁门。
抽屉中的压力传感器通过测量抽屉中的药物重量能够计算得到摆杆推出药材的重量。
温湿度传感器监控的温湿度范围用户可以自己设定[5],如果测得的温度或湿度的两个值之中有一个超过其设定范围,蜂鸣器会自动报警。
STM32单片机通过控制步进电机实现摆杆对药材的推送、二维平面定位系统的自动定位功能、传送带对药材的传送。
编码器可以实时测量步进电机的转速,实现单片机对步进电机的闭环控制。
2.2.2软件功能设计
计算机上位机软件主要包括药柜信息管理、处方管理、抓药记录查询、系统设置等功能。采用MySQL数据库,用户通过计算机上位机软件可以对数据库进行信息存储、检索等操作。
中医在计算机端提交药方后,中药柜端接收任务,通过Wi-Fi模块将抓药信息发送到单片机,单片机接收到抓药指令后,控制抽屉中的摆杆、传送带、同步带以及自动打包机进行抓药。抓药成功后,计算机端收到反馈信息,将抓药记录保存到数据库中进行后续管理,同时控制打印机打印出处方清单。软件工作流程如图2所示。
图2 软件工作流程
3 系统功能实现
智能中药柜系统的功能实现可以分为硬件功能实现和软件功能实现,具体介绍如下。
3.1 硬件功能实现
STM32单片机是由STM32F407ZGT6芯片、Wi-Fi模块、蜂鸣器、压力传感器、温湿度传感器、电磁锁、晶振、电阻、电容、发光二极管、继电器、排针组成。
通信功能实现:STM32单片机使用ESP8266芯片作为Wi-Fi模块的主芯片,STM32单片机作为Wi-Fi STA站点,计算机作为Wi-Fi AP站点,Wi-Fi模块通过路由器连接局域网,计算机通过局域网实现与单片机之间的信息交互。
称重功能实现:采用HX711称重传感器采用将抽屉中的药材重量发送给单片机,单片机根据接收到的数据变化进行作差处理,药材推出之前的重量减去药材推出之后的重量即为所抓出药材的重量,并将数据实时传输到计算机端。
温湿度监控功能实现:采用DHT22温湿度传感器,将其固定在抽屉内的顶部,用杜邦线与单片机相连。单片机对所测数据与用户设定的温湿度值进行作差运算,如果结果超过设定范围,单片机就启动蜂鸣器报警。
推送药品功能实现:无人智能药柜系统中设计的药柜抽屉如图3所示。

图3 药柜抽屉
抽屉的内部结构为1/4圆形结构内仓,在使用时,第一步:将圆形内仓7装满药品,步进电机和减速机2的转动轴端安装摆杆4。第二步:计算机端提交处方后,电磁门1打开,步进电机和减速机2转动摆杆3将药品从孔8处推出。摆杆4只能在位置3和位置5之间进行摆动,摆动角度为0~90度。为了安全,分别在位置3和位置5两边的外侧安装限位开关,一旦摆杆触碰到限位开关,步进电机直接断电并进行报警。第三步:当推送出去的药品达到所需要的药品重量时,步进电机和减速机2停止转动,同时电磁门8自动关闭。第四步:摆杆4从位置5运动到位置3处后,需要进行重新归位即返回到位置5处。在其返回的过程中为了防止摆杆3被药品卡住,在位置6处设计一个小孔使得多余的药品落到抽屉9中进行存储以备下次使用。
自动取药功能实现:无人智能药柜系统的总体设计结构如图4所示。
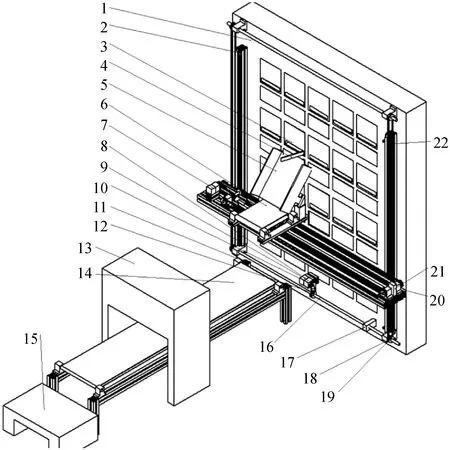
图4 药柜系统的总体设计结构
二维平面定位系统的设计:药柜1的左右两端分别安装滑块导轨2和滑块导轨22,滑块导轨的两边又分别安装同步带和同步轮。步进电机8和涡轮自锁减速机9带动同步轮10转动,同步轮10通过同步带带动传动轴16上的同步轮12和18转动,同步轮18带动同步带19移动。同步带19与滑块导轨22上的滑块、机架20,三者固定连接在一起,滑块导轨2旁边的同步带与导轨2上的滑块、机架20,三者固定连接在一起,从而能带动机架20进行上下移动。编码器17可以实现对于传动轴17转速的实时监控,从而能精准定位机架20的位置。同理,在机架20上同样安装两个滑块导轨,滑块导轨的两边同样安装同步带、同步轮。通过步进电机和涡轮自锁减速机7带动同步带与同步轮进行转动。机架20上两边的同步带与相邻导轨上的滑块和传送带6的底座之间进行固定连接,传送带6和滑道5之间为固定连接,从而传送带6和滑道5能够进行水平方向上的左右运动。机架20上的编码器21可以实时测得传送带6和滑道5的左右运动的速度,从而能够精准定位传送带6和滑道5的位置。由于传送带6和滑道5固定在机架20上,机架20固定在滑块导轨2和滑块导轨22的滑块上,因此传送带6和滑道5既能够实现水平方向上的左右移动,又能够实现竖直方向上的上下移动。在各个滑块导轨的末端均装有限位开关,能够防止滑块脱离导轨。当滑块运动到导轨末端时,会触碰到限位开关,然后直接对步进电机断电并报警,由于减速机为涡轮自锁减速机,因此滑块不能运动。步进电机均采用STM32单片机作为主控制器。
无人智能药柜系统在使用时,第一步:医生在计算机端开好处方后,直接发送到无人智能药柜端和二维平面定位系统端。第二步:无人智能药柜端根据指令找到抽屉3,同时二维平面定位系统根据指令定位到抽屉3,定位完成后发送反馈信号给该抽屉3的STM32单片机。第三步:单片机收到反馈信号后打开电磁铁门,并控制步进电机带动摆杆将药品推出到传送带6上。推出的药品达到处方所规定的重量时,步进电机停止转动,同时电磁铁门关闭,并发送反馈信号给二维平面定位系统。第四步:二维平面定位系统接收到反馈信号后,停留在停靠点11处,开启传送带6和传送带14,将药品传送到传送带14上。第五步:全自动打包机对传送带14上的药品进行打包,打包完成后通过传送带14传送到柜台15上,完成抓药。
3.2 软件功能实现
3.2.1下位机软件功能实现
下位机抽屉端的STM32单片机的温湿度采集程序流程如图5所示,抽屉端总程序流程如图6所示。
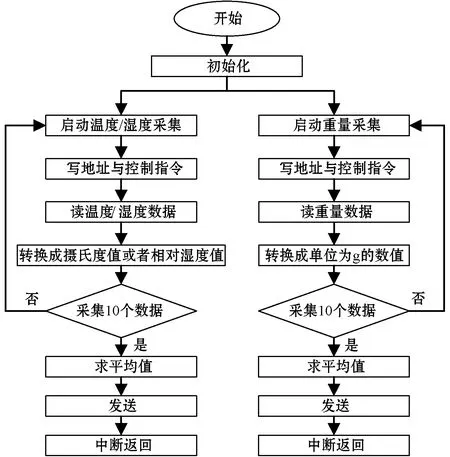
图5 温湿度采集程序流程图
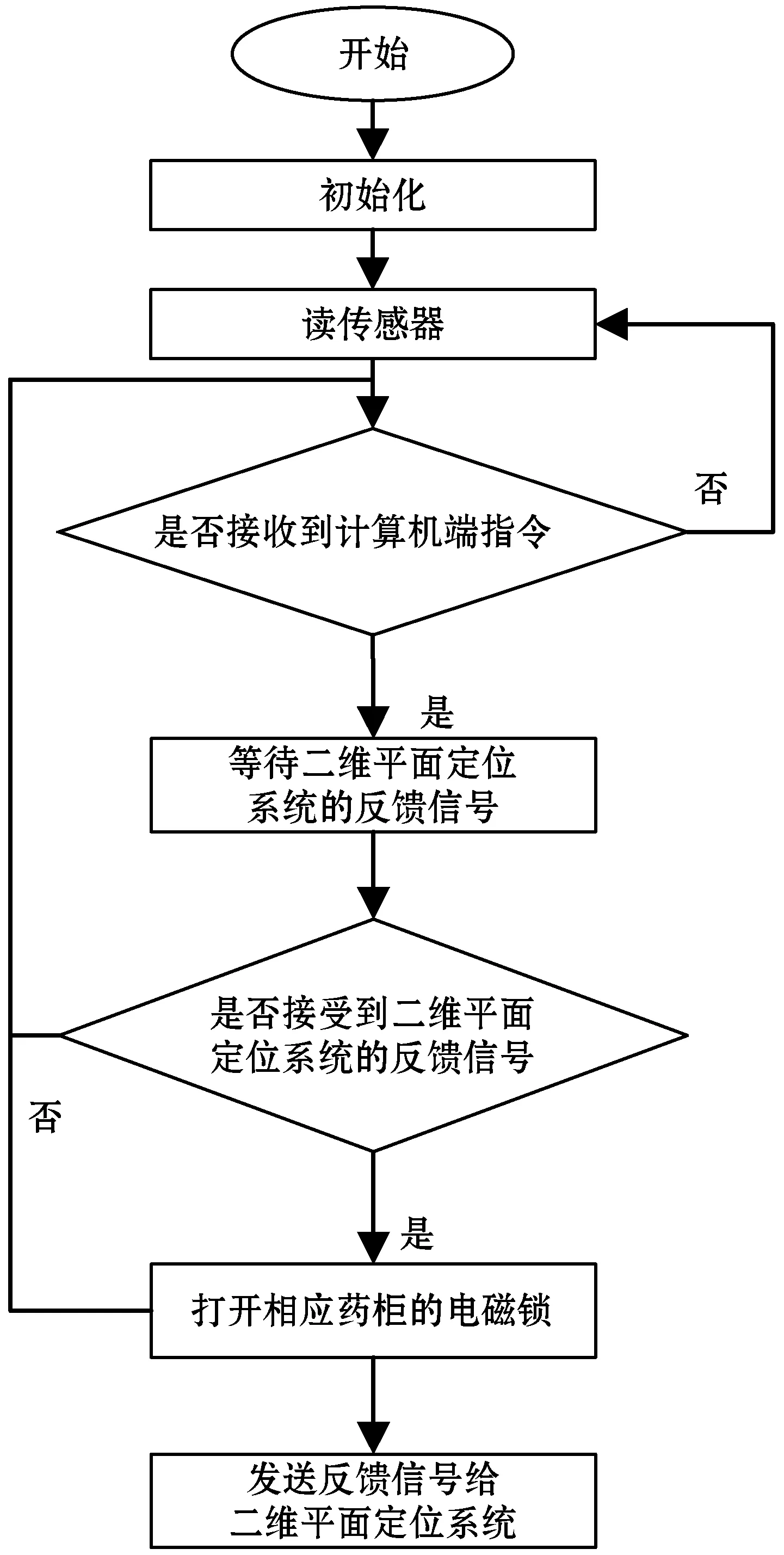
图6 抽屉端总程序流程
下位机二维平面定位系统端程序流程如图7所示。
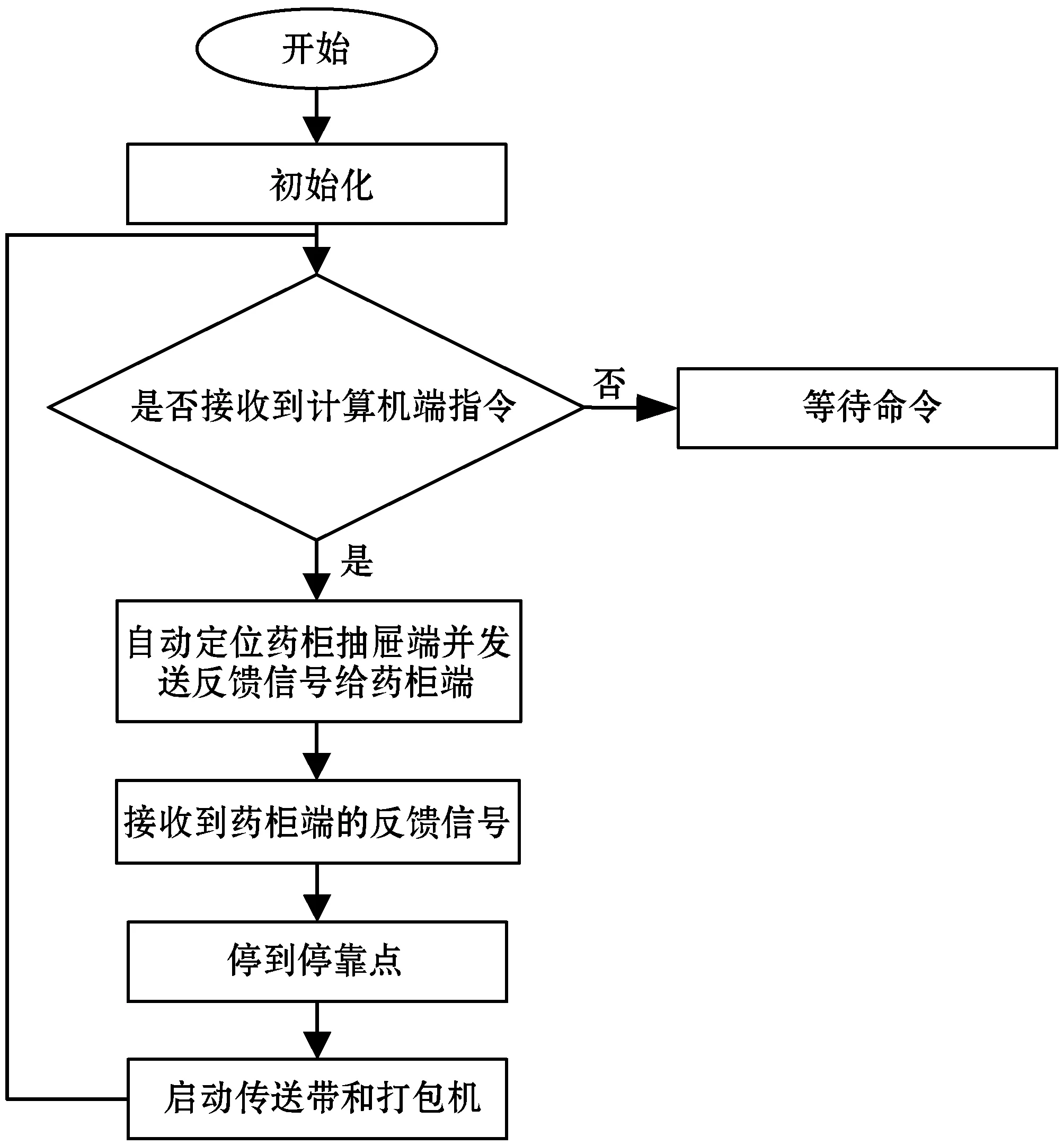
图7 二维平面定位系统端程序流程
二维平面定位系统提前对药柜中的各个抽屉进行位置标定,并与药材编号一一对应起来。药材编号是由柜编号、抽屉编号所组成的,总共4位。每种药品都对应一个药材编号。计算机端发送药材编号到单片机端实现二维平面定位系统自动定位并完成取药。
3.2.2上位机软件功能实现
通过AT指令将STM32单片机上Wi-Fi模块的工作模式设置为STA模式,使其作为Wi-Fi STA站点,路由器作为Wi-Fi AP站点,计算机与STM32单片机均与路由器连接,组成局域网。计算机与STM32单片机之间建立TCP连接,Wi-Fi模块设置为透传模式传输数据,实现计算机对STM32单片机的远程控制。设备连接方式如图8所示。

图8 设备连接方式
计算机端使用AT指令控制STM32单片机。以下为使用到的AT指令语句:
AT+RST
AT+CWMODE=1
AT+CWJAP=“路由器的账号”,“密码”
AT+CIFSR
AT+CIPMUX=1
AT+CIPSTART=“TCP”,“PC端IP”,“端口号”
AT+CIPSTATUS
AT+CIPMODE=1
AT+CIPSEND=5
AT+CIPCLOSE
AT+CIPSTO=时间(单位为秒)
计算机建立MySQL数据库,对STM32单片机所发送的数据信息进行收集、分类、储存。数据库中存有处方记录、药品信息、药品温湿度、药品数量等信息。计算机端软件界面如图9所示。
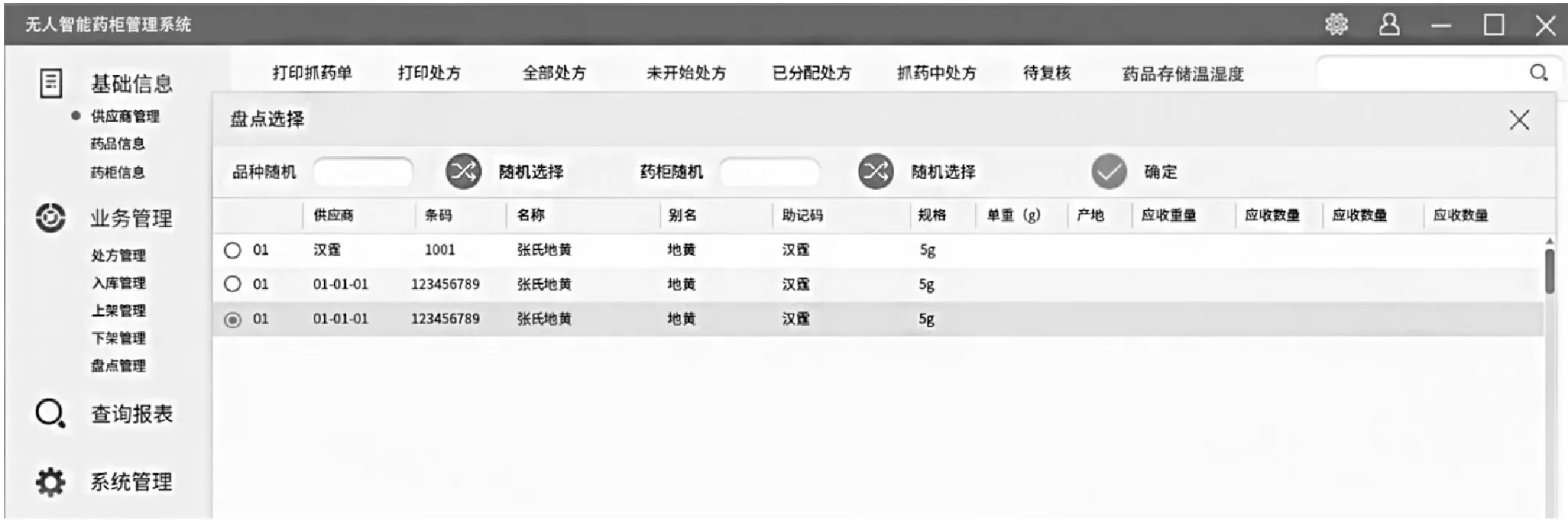
图9 计算机端软件界面
在计算机软件界面端,医生可以进行处方管理,药品的入库管理、上架管理、下架管理、盘点管理、查看药品温湿度等操作。同时,医生还可以在计算机端查看药品的运送状态和具体的运送位置通过记录竖向步进电机和横向步进电机的转速和运行时间,从而计算得到药品的竖直方向和水平方向的具体位置,建立二维平面坐标图,对药品的位置进行打点记录。图10所示为药品位置图。
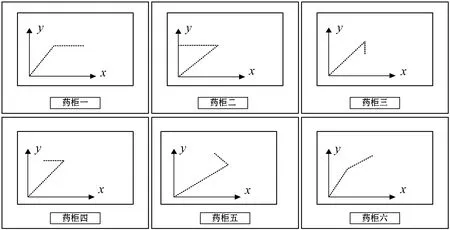
图10 药品位置图
在云服务器端创建数据库,计算机端通过宽带连接云服务器端的IP地址,与云服务器之间进行数据的双向传输。在云服务器端创建数据库可防止药品数据资料的丢失,同时通过云服务器可以实现多台计算机或者手机对无人智能药柜的远程访问和控制。
手机App上位机软件连接云服务器端的IP地址,能够与云服务器之间进行数据的双向传输,并通过云服务器将信息发送到计算机端。用户在手机App上位机软件中可以实现预约挂号、个人账户充值、查看药品信息和订单等多种操作。手机端界面如图11所示。
图11 手机端界面
4 结 语
无人智能中药柜系统对中医院的用药模式进行流程再造和流程优化,提高了药品管理效率,节约了人力资源,降低医嘱执行时间,确保患者用药安全,使医护人员有更多的时间投入到患者医护工作中,并且能有效降低药物退还数量,减轻药品退还而耗费的低效劳动力,使医护人员能够从繁重复杂的基数药品人工清点与记录中解脱出来,极大缩减了药师用于药品管理的时间,提高了药师的工作效率,更好地为患者服务[6-9]。
猜你喜欢
现代仪器与医疗(2022年1期)2022-04-19
都市(2022年1期)2022-03-08
现代信息科技(2021年21期)2021-05-07
小学生学习指导(高年级)(2021年4期)2021-04-29
中学生数理化·高一版(2021年1期)2021-03-19
小学生学习指导(低年级)(2020年6期)2020-07-25
紫禁城(2020年4期)2020-05-20
数学大王·趣味逻辑(2018年2期)2018-01-27
中学教学参考·理科版(2016年11期)2017-06-08
保健文汇(2017年7期)2017-02-02