基于EDEM的气吸播种单体设计与试验*
2023-11-11 04:01曹现超杨东山杜新武金鑫王建华黄文龙
中国农机化学报 2023年10期
曹现超,杨东山,杜新武,金鑫,王建华,黄文龙
(1.河南科技大学农业装备工程学院,河南洛阳,471003;2.第一拖拉机股份有限公司,河南洛阳,471004)
0 引言
精量播种是精准农业的重要环节,是指依据农艺要求的播种密度,按照一致行距、粒距和播深将种子播入土壤并准确定位。作为农作物机械化种植的主要方式,被广泛应用在玉米、棉花和蔬菜等大宗农作物生产中[1-5]。
精密排种器作为实现精密播种技术的核心部件,是国内外学者研究的重点与热点[6-10],史嵩[11]将排种器型孔与种子搅拌装置相融合,设计了一款气压组合孔式玉米精量排种器,并阐述了正压气流与导种槽相结合提高充种性能的原理;丁力等[12]针对气吸玉米排种器重播指数高,清种机构设计不合理等问题,优化设计了气吸式排种器清种机构,并建立了清种过程数学模型,分析了清种过程的运动机理,分析了影响清种机构形状的关键因素为种子尺寸和种盘型孔位置,并进行了DEM-CFD耦合仿真与对比试验。也有部分学者对播种机的导种管及相关技术进行研究;刘立晶等[13]采用Geomagic Design软件三维逆向工程设计了弧形导种管,并进行了对比试验,说明了导种管提高了播种质量。上述研究主要集中在排种器充种性能提升、导种管结构优化等方面,对种子在导种管中的运动研究则较少。
本文以2BMQ-8气吸精量播种机为对象,利用高速摄像机对玉米种子在透明有机玻璃导种管中下落过程进行试验记录,根据试验数据分析建立种子在导种管中的运动模型,并在EDEM中完成投送仿真验证,探究播种株距不均匀的根本原因,实现播种机的优化及验证。
1 种子投送过程分析
为了观察2BMQ-8气吸精量播种机株距不均匀根本原因,借助高速摄像机对玉米种子在透明有机玻璃导种管中下落过程进行试验研究,并采用图像后处理方法对玉米种子在导种管中运动过程进行分析。运动轨迹可分为三种情况,如图1所示。
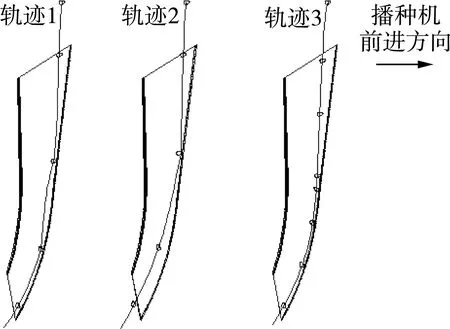
图1 种子在导种管中轨迹示意图
1) 轨迹1:种子与导种管直线段发生碰撞,碰撞入射角较大,种子反射离开导种管壁,并与导种管曲线段发生多次碰撞,随后沿导种管滚滑出导种管,此类轨迹种子占比约72.3%。
2) 轨迹2:种子与导种管直线段发生碰撞,碰撞入射角大,种子反射离开导种管壁,随后在导种管中自由运动出导种管,不与导种管发生二次碰撞,占比约4.1%。
3) 轨迹3:种子与导种管直线段发生碰撞,碰撞入射角小,碰撞后种子沿导种管壁向下作滚滑运动,此类轨迹种子占比约23.6%。
分析种子在导种管中运动时间间隔,发现轨迹1具有不确定性,时间间隔变异系数为38.41%,是导致播种株距变异系数增大的主要原因;轨迹2碰撞次数少,但碰撞位置具有不确定性,反射后轨迹难以总结规律;轨迹3时间间隔变异系数为18.57%,满足播种机性能要求。
2 种子投送工作原理与机理分析
2.1 投送装置结构与工作原理
2BMQ-8型气吸精量播种机投送装置结构如图2所示,主要由排种器后盖、气室盖、种盘、导种管、清种操纵指针、清种刀、种量调节器、排种轴等组成。
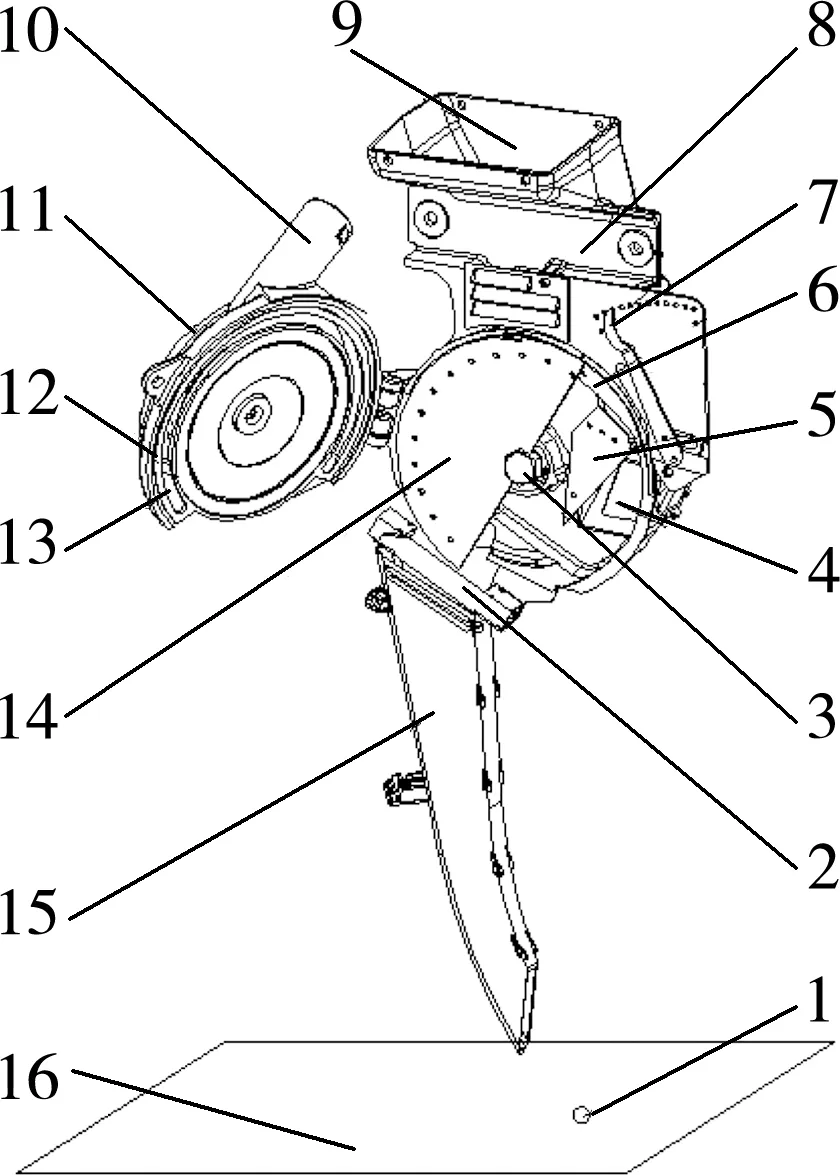
图2 气吸精量播种机投送装置
种子投送过程如图3所示,密封垫与气室盖形成的气室在种盘型孔两侧形成压差,将种子吸附在型孔上,种子随种盘转动,完成分离过程;清种机构将多余种子清除,当种子随种盘转动至投种点位置时,气流被阻断,种子失去吸附力,脱离种盘,种子以一定初速度,斜抛进入导种管,随后在导种管中发生碰撞等一系列接触后落入种沟,完成排种作业。
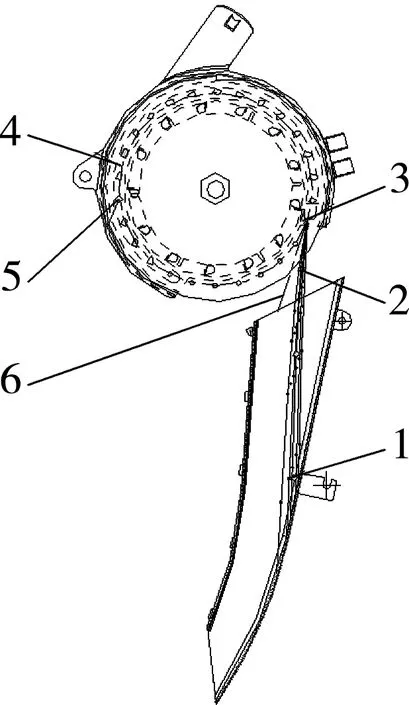
图3 种子投送过程示意图
2.2 投送运移过程分析
种子投送运移过程分为脱离种盘抛出和导种管中运动两个阶段,本文主要对种子在导种管中运动进行研究,根据张建平等[14]研究可知,大部分种子在排种器的同一点,沿吸种孔分布圆切向排出,初速度为v0=ωR(ω为种盘转速,R为半径),仅受重力影响,经测定样机排种器投种点为气室与密封垫末端相贴合处。以该点为坐标原点,建立平面直角坐标系,可列出种子运动的轨迹方程如下。
其中Vx=ωRsinθ,Vy=ωRcosθ。
式中:(x,y)——种子某一时刻的坐标位置;
Vx——速度V在X轴方向分量;
g——重力加速度;
t——时间;
θ——速度V与竖直方向夹角;
Vy——速度V在Y轴方向分量。
通过方程可以得到:(1)种盘转速决定种子投送初速度,不同转速下种子运动轨迹及首次碰撞情况不同,随着种盘转速ω增大,种子运动轨迹向播种机前进的反方向移动越大,种子的首次碰撞点位置越低;(2)排种器与导种管的位置布置影响种子与导种管的首次碰撞位置、碰撞强度、碰撞反射角度,从而影响种子在导种管中的碰撞次数、滑动时间等参数,进而影响播种株距。
3 离散元仿真建模与分析
根据上述分析,以投种点抛出种子为研究对象,借助EDEM模拟种子在导种管中的运动情况,并对种子运动轨迹数据进行分析。本文选取Hertz-Mindlin 无滑移接触模型。
3.1 种子颗粒与仿真参数选定
选取濮玉7号玉米品种为研究对象。对种子外形尺寸进行测量,根据测量数据,建立玉米种子颗粒模型,种子外形数据如表1所示,颗粒模型如图4所示。
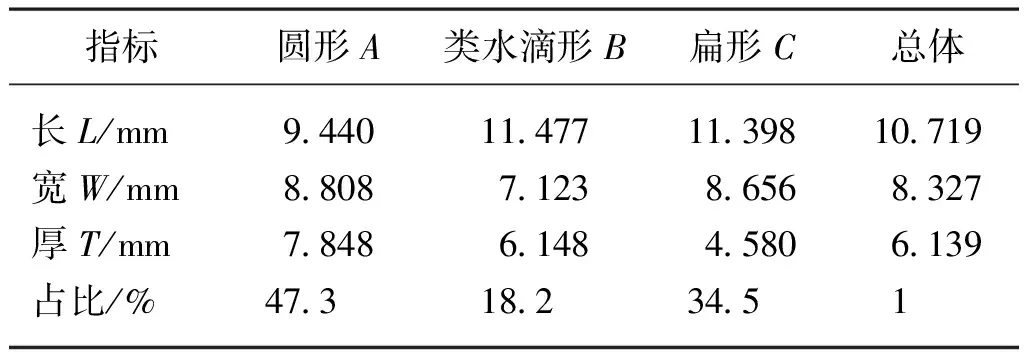
表1 玉米种子外形尺寸数据

(a) 圆形种子
仿真包含玉米种子、导种管两种材质物料,物料力学性能接触参数[15]设定如表2所示。
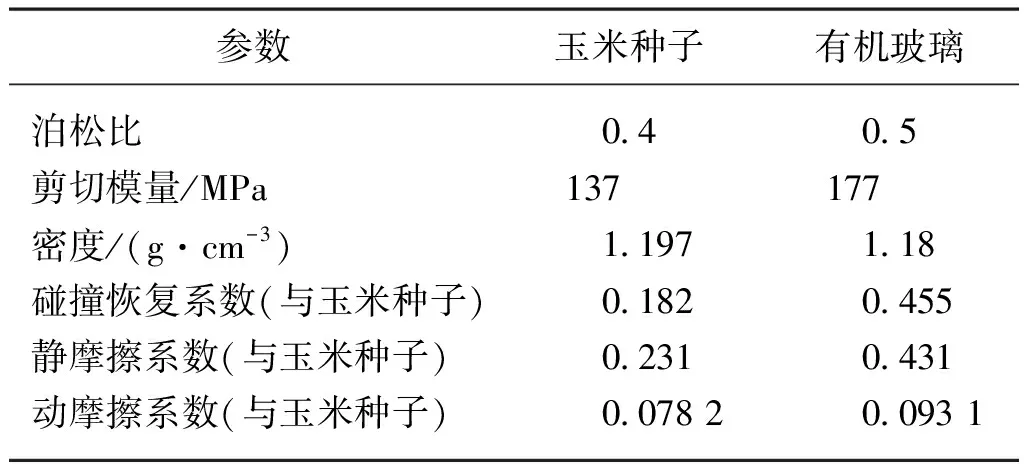
表2 物料力学性能接触参数
为对比分析仿真与试验情况,仿真设定玉米株距26 cm,排种盘转速为19.7 r/min、24.7 r/min和29.6 r/min,对应播种机前进速度为8 km/h、10 km/h、12 km/h,对三类种子分别进行模拟投送,种子投送姿态按竖直1、水平2、反向竖直3三种姿态设定[16],Rayleigh Time Step设置为20%,输出时间步长0.01 s,网格大小2 mm,仿真时间总长20 s,种子仿真运动轨迹如图5所示。

图5 导种管中种子仿真轨迹
3.2 仿真数据与分析
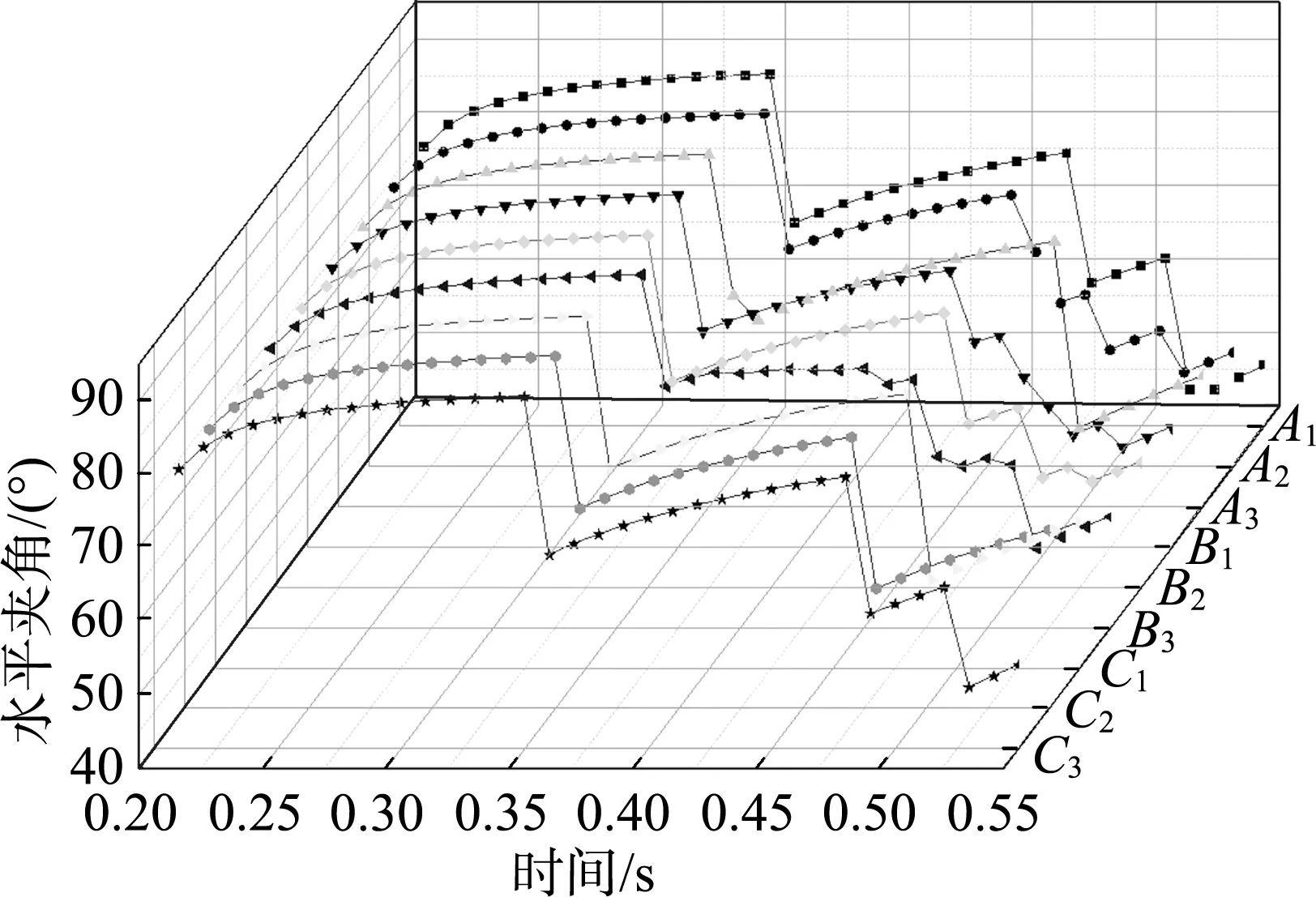
提取并导出仿真运动轨迹数据,数据包含种子质心坐标(x,y,z)及种子运动速度在各坐标分量(Vx,Vy,Vz),运用Origin pro 8对导出数据进行图形化处理,得到种子运动轨迹、速度变化曲线图,如图6、图7所示,其中A1表示圆形种子按竖直姿态投送,A2表示圆形种子按水平姿态投送,A3表示圆形种子按反向竖直姿态投送;B1表示类水滴形种子按竖直姿态投送,B2表示类水滴形种子按水平姿态投送,B3表示类水滴形种子按反向竖直姿态投送;C1表示扁形种子按竖直姿态投送,C2表示扁形种子按水平姿态投送,C3表示扁形种子按反向竖直姿态投送。

(a) 播种机前进速度为8 km/h
(a) 播种机前进速度为8 km/h
由图6种子运动仿真轨迹数据及过程可知:(1)种子在下落过程中会与导种管发生多次碰撞,首次碰撞点随着播种机速度增加而后移;(2)种子下落过程中既有滑动也有滚动;(3)种子在种管中碰撞导致运动轨迹各异,下落时间也不一致,下落时间在0.31~0.32 s之间;(4)碰撞情形不同也导致种子从导种管射出位置、角度不同,种子着地点不同,株距发生变异;(5)碰撞会在Z方向上产生位移,这也是株距不均匀的原因之一。
由图7种子速度与水平夹角变化可知:(1)种子下落过程中与导种管发生2~5次碰撞,碰撞使种子水平速度分量增大,有利于形成零速落种,进一步得到种子落地时的速度平均值分别为2.602 m/s、2.623 m/s、2.635 m/s,根据韩广森[17]提出的种子着地角为75°~85°时偏移量最小,可以计算3种速度下零速落种时导种管末端角度在53°~68°之间;(2)种子在导种管圆弧段的碰撞较为剧烈、频繁,分析原因有:第一,种子运动到圆弧部分后速度较大,碰撞较之前激烈;第二,导种管圆弧段角度变小,致使种子碰撞时入射角较直线段增大,反射角也增大。因此,设计时种子与导种管首次碰撞点应处于导种管直线段。(3)随着播种机前进速度的增大,种子着地角减小,这加剧了种子的着地弹跳,即高速作业时播种株距均匀性变差,变异系数增大。
进一步对首次碰撞的入射角、反射角进行研究,定义反射率为反射角与入射角比值的绝对值,A、B、C三类种子3种姿态下运动入射角及反射角数据如表3所示。
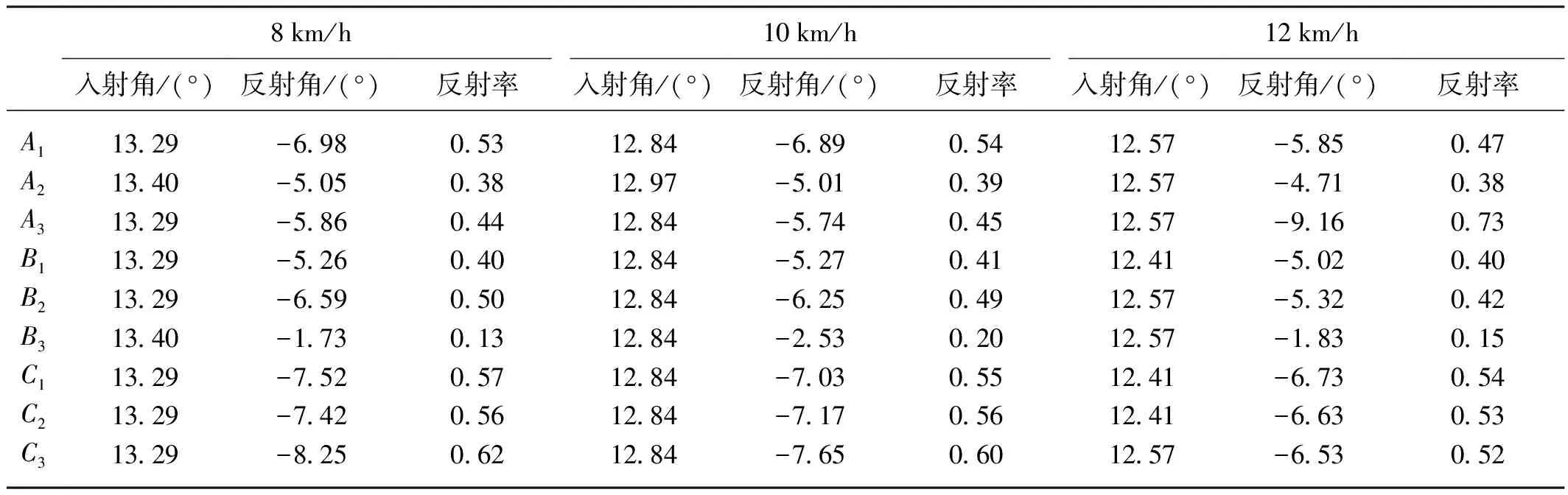
表3 种子运动入射角及反射角数据
由表3可知:(1)种子与导种管首次碰撞后反射率为0.40~0.56,种子与导种管入射角为12.41°~13.40°,种子与导种管接触后会发生跳跃离开导种管,并发生多次碰撞,种子轨迹变化,播种株距一致性变差;(2)根据反射率反计算,需将种子与导种管首次碰撞的入射角控制在4°~6.5°,反射角控制在2.5°以下,种子下落轨迹较为理想,此时种子运动轨迹为首次碰撞后沿导种管滚滑下落,不离开导种管。
3.3 播种单体设计改进
根据仿真试验分析可知,2BMQ-8气吸精量播种机株距不均匀根本原因有两点:(1)原排种结构种子与导种管入射角为12.41°~13.40°,超出理想入射角4°~6.5°,入射角过大导致种子与导种管发生碰撞后跃离导种管,进而发生后续多次碰撞,种子运动轨迹差异较大,下落时间不一致,株距变异增大;(2)同时碰撞导致种子从导种管射出位置、角度不同,种子着地点与预期不同,株距产生差异。
基于上述原因,对播种单体进行了两项重点改进:(1)优化导种管布置。使播种单体在常用作业速度下,种子与导种管首次碰撞入射角设计在4°~6.5°,最高速为12 km/h时,首次碰撞点仍处于导种管直线段部分;(2)参考现有指夹播种机产品单体增加压种轮装置。对射出种子快速定位,减小种子着地弹跳带来的差异。
由仿真数据绘制出8 km/h、10 km/h、12 km/h速度下种子轨迹,调整导种管布置,不难发现作业速度越低,种子轨迹与导种管首次碰撞入射角越大,以作业速度为8 km/h时,种子与种管首次碰撞入射角为4°~6.5°为约束条件,计算可得导种管直线段与水平面夹角为82.5°~85°,取值83°,同时以12 km/h速度时种子碰撞点仍处于导种管直线段部分确定导种管安装点距排种器中心高度为140 mm,优化后导种管布置如图8所示。
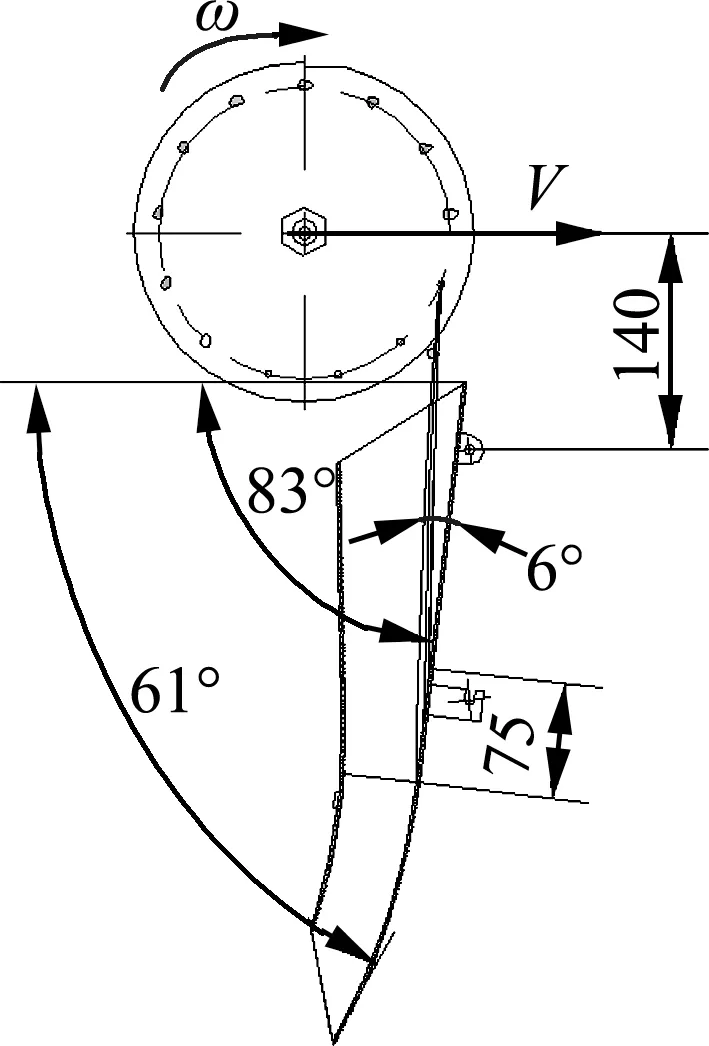
图8 优化后导种管布置图示
对改进后排种系统进行仿真,以作业速度为10 km/h为例,改进前后种子运动轨迹对比如图9所示,改进后种子沿导种管壁下滑,并在导种管末端沿圆弧段切线方向射出,平均射出速度为1.289 m/s,种子在导种管内经停时间一致,均为0.30 s。
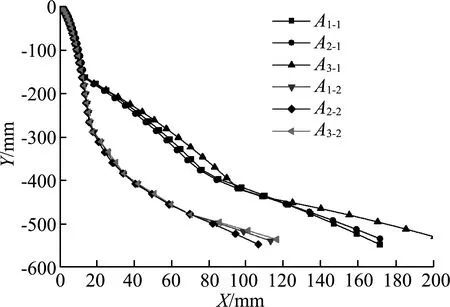
图9 优化前后种子运动轨迹对比
4 田间试验
4.1 试验设计
为验证仿真分析结果,对2BMQ-8型气吸精量播种机单体进行改制并试验验证,试验地点洛阳孟津试验场,如图10所示,配套动力为LF1304拖拉机,前进速度为8.9 km/h、10.55 km/h,调定播种株距26 cm,试验用种子濮玉7号,种子千粒重388.4 g,种子含水率13%,试验依据GB/T 6973—2005《单粒(精密)播种机试验方法》。

(a) 整机
4.2 试验结果与分析
将改进前后试验数据进行对比,结果如表4所示。
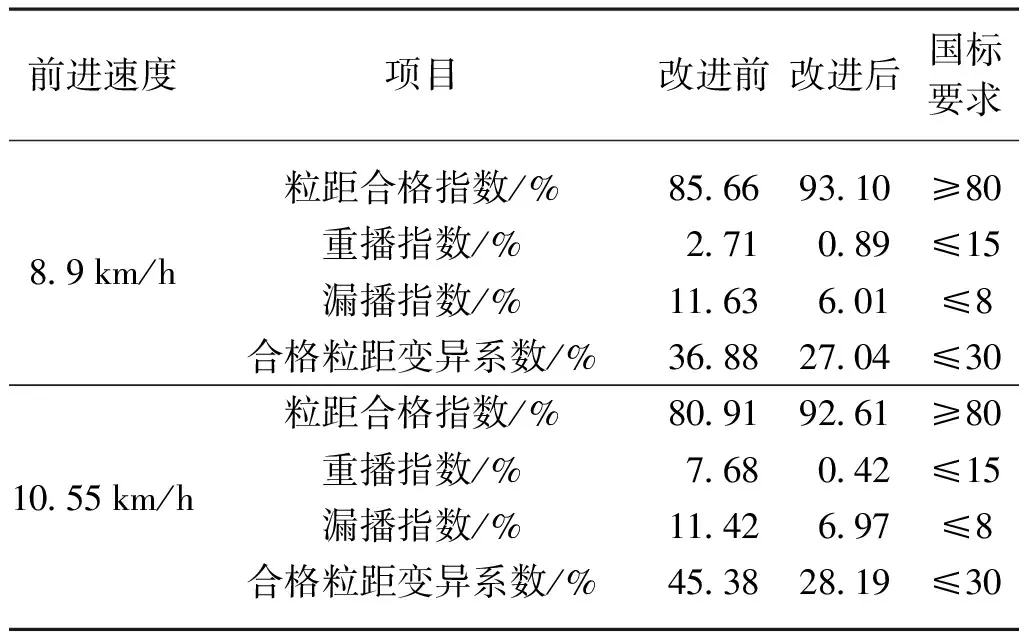
表4 改进前后试验数据
由试验数据可得:(1)优化导种管与排种器布置后的播种单体,播种粒距合格指数提升7%~12%,达到92%~93%,性能指标提升明显。(2)重播指数下降至1%以内,漏播指数下降5%左右,满足国标要求。(3)合格粒距变异系数小于30%,粒距精准性、稳定性有较大改善。田间试验结果表明改进后播种机作业性能指标有明显提升,达到国标要求,改进有效。
5 结论
以排种器及导种管共同组成的种子投送系统为研究对象,对种子投送过程进行理论建模,对气吸精量播种机株距均匀性指标进行了仿真研究,探究了影响种子运动轨迹的主要影响因素,对2BMQ-8型气吸精量播种机单体进行改进。
1) 对种子在导种管中运动进行分析,指出影响种子运动轨迹的主要因素:种盘转速、排种器与导种管布置等,并简要分析了各因素影响种子运动轨迹机理。
2) 利用EDEM软件对种子在导种管中运动进行仿真,得到种子在导种管中的运动轨迹,并指出匀速作业时,株距的均匀性取决于相邻种子在到导种管中的运动时间是否一致,种子射出导种管位置及角度是否一致,即株距的均匀性主要受种子运移系统及着地弹跳影响。
3) 根据对种子运动轨迹、运动速度夹角、运动入射角及反射角等数据分析,得出种子与导种管首次碰撞的理想入射角为4°~6.5°,碰撞后种子沿导种管滚滑下落。
4) 对优化单体后播种机进行仿真与田间试验验证,结果显示种子运动轨迹为沿导种管壁下滑,并在导种管末端沿圆弧段切线方向射出,粒距合格指数达到90%以上,合格粒距变异系数小于30%,改进有效,播种机性能得到较大提升。
猜你喜欢
湖州师范学院学报(2023年8期)2023-10-17
今日农业(2020年22期)2020-12-14
弹箭与制导学报(2018年3期)2018-08-28
农业工程学报(2018年8期)2018-05-13
石油地球物理勘探(2017年2期)2017-11-23
雷锋(2016年4期)2016-05-30
学习月刊(2015年10期)2015-07-09
中国水利(2015年19期)2015-04-20
农家顾问(2014年6期)2014-06-30
新疆农垦科技(2014年10期)2014-02-28