西洋参双排播种机设计与试验*
2023-11-11 04:01张心久刘尊超王铭张良龙王方艳连政国
中国农机化学报 2023年10期
张心久,刘尊超,王铭,张良龙,王方艳,连政国
(青岛农业大学机电工程学院,山东青岛,266109)
0 引言
西洋参又名花旗参,属多年生草本植物,医药保健用途等同我国人参。随着西洋参种植业的迅速发展,我国西洋参产量仅次于美国和加拿大,且山东省产量约占全国产量的40.18%。虽然西洋参种植广泛,但机械化种植技术及装备落后。尤其是西洋参窄行密植的种植模式和山东弧面垄的种植农艺,增加了机械化播种的难度,限制了西洋参种植产业的发展[1-2]。
国外对西洋参的种植较早,机械化程度较高,大多采用通用播种设备,如德国生产的ED系列气吸式精密播种机。由于种植模式及种植农艺差异,国外已有设备无法在我国推广使用。我国西洋参产业的机械化作业起步晚,整体机械化技术及装备水平低。其中,西洋参窄行密植的播种环节,存在劳动强度大、种植难度高等问题,限制了西洋参规模化种植的发展。当前,西洋参种植仍以人工点播为主,少部分地区采用人工辅助作业的开穴设备。受山东西洋参宽幅弧面的种植模式等因素影响,高效的播种机具有较大的需求市场[3]。支帅等研制了一款气吸针式西洋参播种机,排种器采用曲柄滑块式的排种针机构,可以有效清洁吸嘴、减少堵塞。廖宜涛等[4]研制了一款自走式西洋参播种机,其配备了4.1 kW的发动机,采用了联行星轮点播式全约束导种装置及气吸式排种器。现有半机械式播种机,相比人工点播效率有所提高,但存在播量稳定性差、效率低、劳动强度大等问题。因此,研制出一种新型的西洋参播种机,可推动西洋参机械化作业、规模化生产,促进西洋参产业的快速发展。基于此,本文设计一款西洋参双排播种机,采用纯机械多连杆式取种、投种、播种装置,无需配备风机、发动机等动力装置。
1 整机结构及工作原理
西洋参播种机主要包括机架、种箱、取种机构、连杆机构、推种机构、开穴器、导种管等组成,如图1所示。其中,摇臂、种勺、勺架和电机构成取种机构;桁架和推种舌组成推种机构。
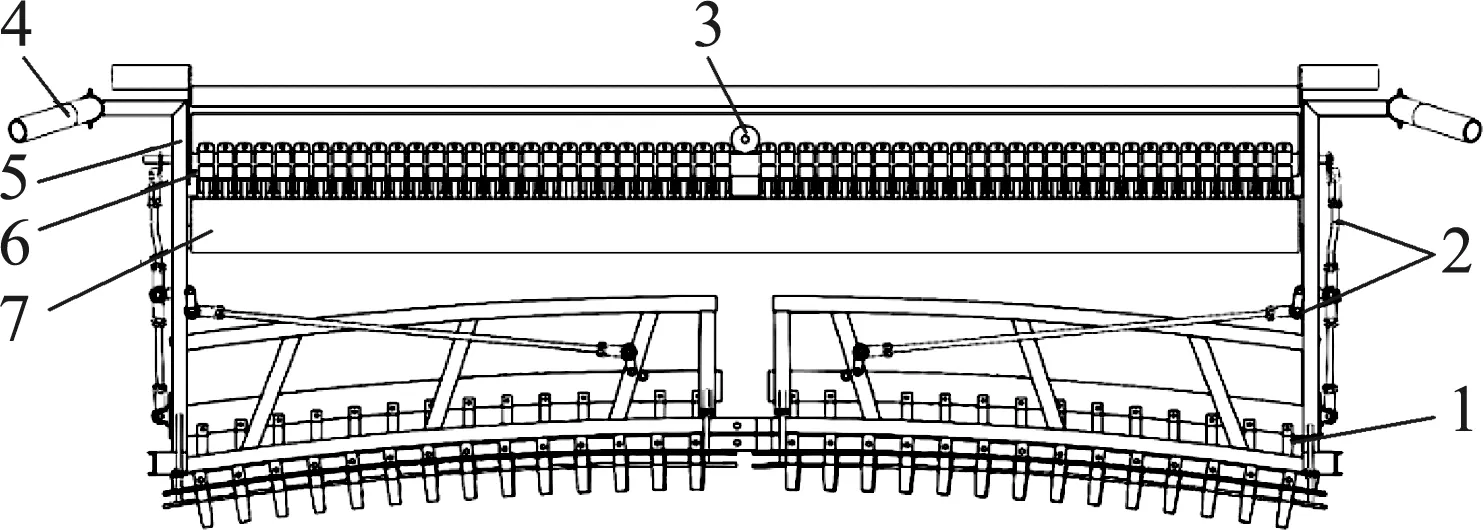
(a) 主视图
工作时,双人抬起机具放到指定位置,借助机具自身重力使开穴器入土,并依托弧板控制开穴深度。通过人工向右侧摆动摇臂至限位装置,带动勺架顺时针转动,种勺进入种箱并与种子充分接触,完成取种;摇臂摆动的同时带动连杆机构运动将推种机构抬升至最高点,开穴器在弹簧的作用下闭合。这一过程结束后,人工向左侧摆动摇臂至限位装置,带动勺架逆时针转动,左侧限位装置装有限位开关,开关闭合,使勺架上的电机高速转动,借助离心锤的离心力激发种勺振动,实现种子的振落,种子通过导种管落入闭合的开穴器中;摇臂摆动的同时带动连杆机构运动将推种机构下压,推种舌克服开穴器的弹簧力顶开开穴器并将种子排出,完成播种作业。西洋参播种机主要技术参数如表1所示。
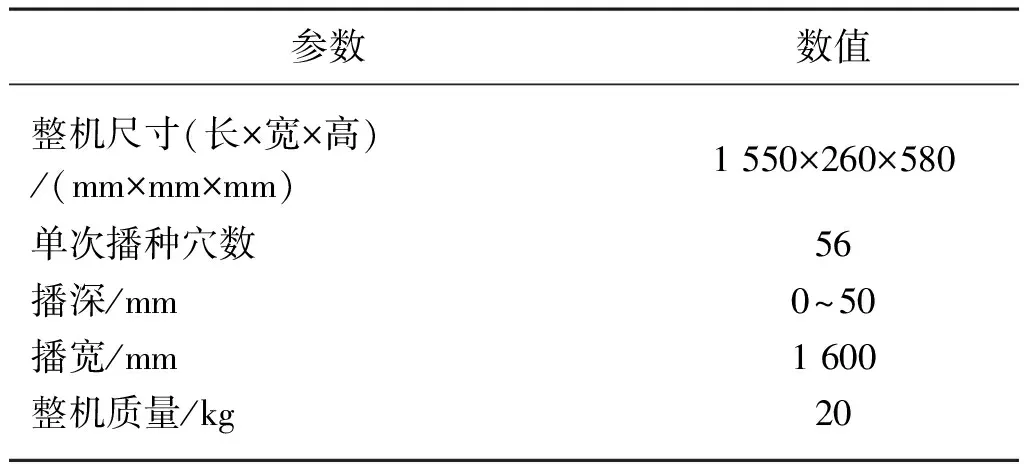
表1 主要技术参数表
2 关键部件设计
2.1 取种机构
取种机构主要完成取种和投种两个动作。取种时,种勺垂直埋于种箱内,种子在重力作用下充入种勺内。随着摇臂的转动,种勺运动到落种槽的上方,并成一定倾角。在电机离心锤产生的高频振动下,种子脱离种勺落入种槽中,并由导种管引导进入开穴器,实现投种作业。在此过程中,种勺型孔结构及倾角控制机构,决定着种子的充种及投种效果,影响着机具的播种质量[5-6]。
2.1.1 种勺参数
种勺是播种机完成取种工作的主要部件,既要保证充种效果,又要实现顺利投种。种勺的结构尺寸尤为重要,应尽量与种子外形尺寸贴合。西洋参种子轮廓为宽卵形,即“D”形[7],经播种催芽后裂口,轮廓形状如图2所示。

图2 西洋参种子轮廓形态
选取西洋参100粒,测定种子尺寸。其长度L为(5.6±0.5) mm,宽度W为(4.8±0.3) mm,厚度T为(3.3±0.4) mm。
为提高播种精度和质量,要求种勺型孔刚好放下一个扁平状态的种子,种勺深度不宜太深,可近似为内凹圆。根据最小势能原理可知,种子在种勺型孔中的稳定姿态多为平躺状态[8],如图3所示。

图3 种子在型孔中的姿态
各参数满足[9]
(1)
式中:Lmax——西洋参种子长度最大值,mm;
Lmin——西洋参种子长度最小值,mm;
Tmax——西洋参种子厚度最大值,mm;
Tmin——西洋参种子厚度最小值,mm;
A——种勺型孔长度,mm;
B——种勺型孔宽度,mm;
C——种勺型孔高度,mm。
为保证西洋参单粒充种和顺利脱离,结合制造工艺及成本,确定种勺型孔为内凹圆形,直径D为8 mm,高度C为4 mm。
由上文知,西洋参种子三轴尺寸为5.6 mm×4.8 mm×3.3 mm,体积近似为88.7 mm3。由于种子要在重力作用下充入种勺,考虑到种子的流动性,决定采用圆底设计,其结构如图4所示。
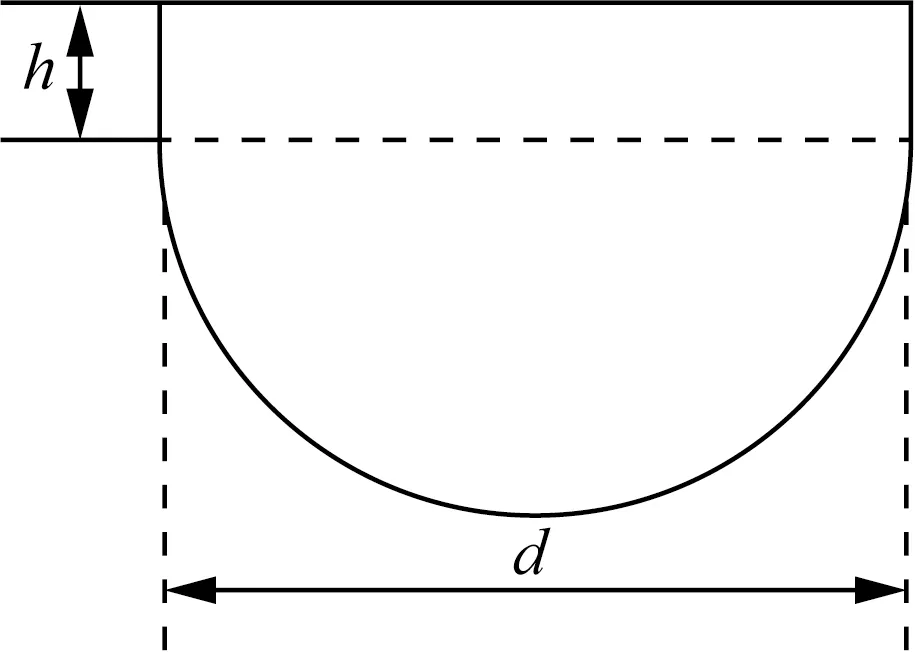
图4 种箱截面
根据各部件的位置特性,种箱截面半径r取50 mm,种箱长度E取1 450 mm,为了满足作业要求,实现连续播0.067 hm2不补种,根据式(2)计算得出,种箱截面矩形长度h约为28.77 mm,为了便于加工取30 mm,因此根据种勺末端行程与种箱的安装距离以及种箱的深度,种勺长度a应该为75 mm,根据种植行距和安装间隙要求,种勺安装座宽度b取40 mm,种勺结构如图5所示。
图5 种勺结构
(2)
式中:d——种箱截面直径,mm;
h——种箱截面矩形高度,mm;
l——株距,mm;
w——垄宽,mm;
m——每行播种穴数。
2.1.2 倾角控制机构
种勺的倾角可直接影响工作过程中种子在种勺中的稳定性。为了便于取种和落种,设计连杆机构控制两个工位中种勺的倾角,如图6所示。
工作时,当摇臂在取种工位时,种勺倾角为0,保证取种过程的稳定。当摇臂转动到另一侧时,在弹簧和连杆的共同作用下,横梁整体右移动并倾斜,使得种勺倾斜。在摇臂处于落种工位时,种勺倾角α>种勺与种子的摩擦角δ,可利于种子的下落。因此,确定种勺倾角为30°[10],则电机更容易将种子抖落,提高落种的成功率。结合结构空间要求,确定横梁长为160 mm,连杆I长为160 mm,连杆II长为210 mm。
2.1.3 电机选型
电机安装在勺架上,摇臂一侧限位装置装有限位开关,当摇臂转动到该限位装置时,电机通电并高速旋转,电机轴上安装有振动锤,其主要作用是产生离心力,带动勺架振动,增强排种性能,使种子顺利掉落。为保证振动锤可带动勺架振动,需要使其产生的离心力大于勺架总成重力。勺架总成质量M约为3 000 g,振动锤锤头质量m0为20 g,锤柄重忽略不计,其重心距锤柄末端距离r0为50mm,根据式(3)计算得出,电机最小转速为1 638.2 r/min。根据式(4)计算得出,电机最小功率为1.68 W,因此选定电机型号为WS-38ZYT64-R直流电机[11],其空载转速为2 000 r/min,输入功率为4.3 W,可以满足使用要求。
(3)
式中:g——重力加速度,9.8 m/s2;
F——离心力,N;
ω——角速度,rad/s;
N0——电机转速,r/s。
(4)
式中:P——电机所需功率,W;
T0——电机所需扭矩,N·m。
2.2 开穴器
针对西洋参窄行密植的种植模式,设计开穴式的种植方式,采用顶推式的原理实现开穴器的开合,并避免土壤及种子被带回。开穴器主要由定板、动板、回位弹簧、推种舌等组成,如图7所示。
(a) 落种状态
工作过程中,开穴器做往复运动,且不断与土壤接触。为保证较好的耐磨性,开穴器采用耐磨合金钢加工而成,并安装在机架上。当推种舌位于高位时,种子落于闭合的开穴器中。随着推种舌的运动,开穴器的动板被顶开,种子被推入土中。之后,推种舌回程,开穴器在回位弹簧的作用下闭合。选用适宜的复位弹簧,保障开穴器顺利闭合,减少因闭合不严而导致的漏播、重播。
2.2.1 开穴器
在开穴过程中,开穴器与土壤直接接触,所受阻力受土壤抗剪力、压缩力和摩擦力等影响。通常,开穴阻力与土壤坚实度、接触土壤的正压面积均成正比关系[12]。为减少土壤扰动,形成稳定的开穴结构,结合种子尺寸、播种间距,确定如图8所示的开穴器结构[13]。通过开穴器入土、开合过程分析,确定开穴器开合口I为9.5 mm,因西洋参播种间距为100 mm、株距为50 mm、播深为20~30 mm[14],确定开穴器尖端入土深度S为45 mm,开穴器总高度H为130 mm,铲体宽度G为21 mm。选取活销距入土尖端距离J为105 mm,以确保活销旋转机构处于地表之上,避免旋转机构磨损及破坏。
图8 开穴器工作状态
2.2.2 推种舌
推种舌为播种过程中的重要部件,决定着开穴器的开合状态。推种舌分为直臂和导轨两部分,结构如图9所示。工作中,导轨与动板直接接触,克服弹簧阻力推开动板,完成开穴器的开穴动作。为保障顺利落种、土壤不回流,确定推种舌最低点位为开穴器外10 mm;结合播种深度要求、种子落入开穴器底端的空间需要,确定推种舌最高点位为开穴器内50 mm处。考虑推种舌在开穴器内往复运动,确定推种舌总长p为160 mm、导轨长度z为60 mm。推种舌的底面影响推种效果和压力,决定开穴器的开穴范围和土壤扰动效果,结合经验确定推种舌底面尺寸u×v为7 mm×7 mm。
图9 推种舌结构图
2.3 推种机构
播种机的传动机构为多连杆机构,两侧对称安装,如图10所示。摇臂为主动件,cd杆和fg杆连接推杆器的两侧。当摇臂由取种工位运动到投种工位时,摇臂做顺时针摆动,带动同轴的摇杆ab转动,牵连连杆bc运动,使得cd杆在滑轨内做移动;同时,bc杆带动ce杆做逆时针转动,在ef杆的牵动下,fg杆做顺时针摆动。在cd杆和fg杆的双重作用下,安装着推种舌的推种机构在开穴器内运动,实现播种工作。为了保障推种机构两侧运动距离保持一致,使得推种舌平稳向下运动完成推种动作,ce杆、ef杆和fg杆构成反平行四边形结构,且各杆保障推种舌运动近似为直线轨迹。为了提高工作效率,bc杆分别牵动播种机两侧的推种机构同时运动,实现双排开穴器的同时工作,完成西洋参播种作业。
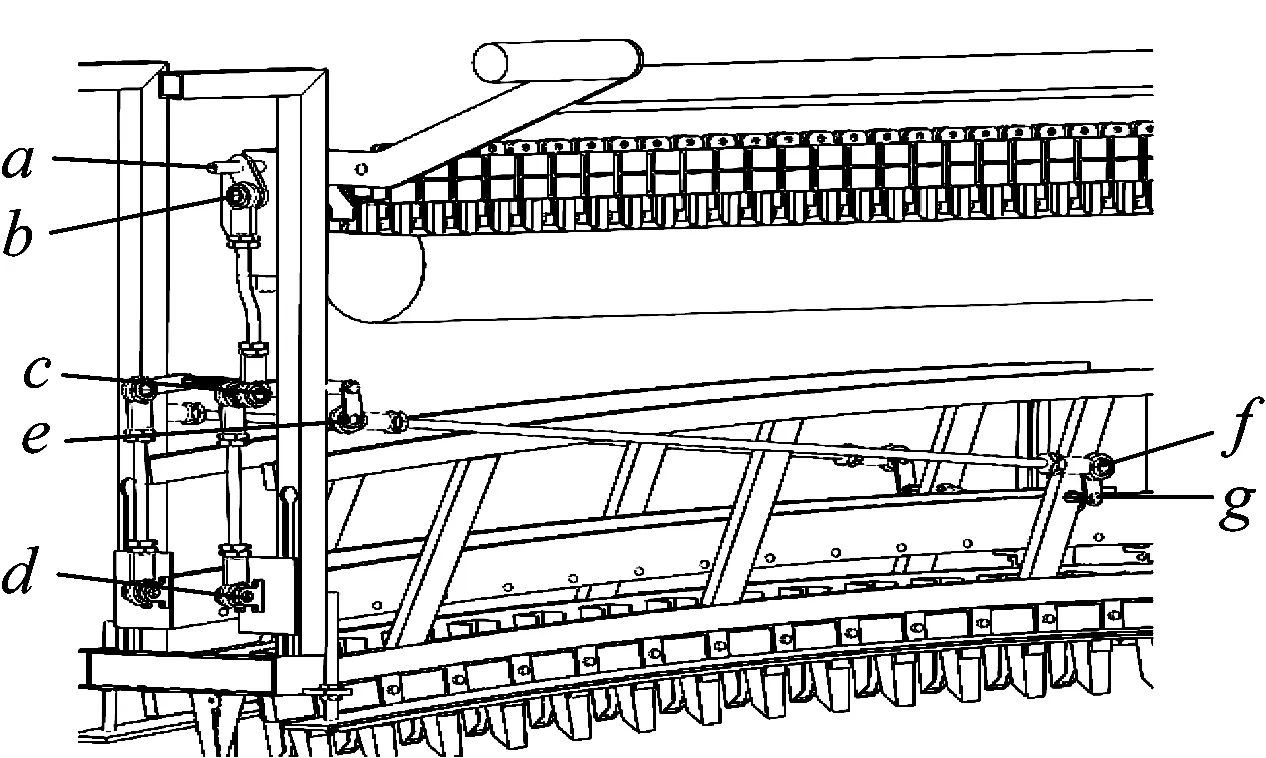
图10 连杆机构
通过空间机构自由度计算办法,确定传动系统的运动轨迹。根据摇臂的运动空间及工位[15],确定ab杆长为25 mm。结合播种机的高度及设计经验,确定bc杆长为175 mm,cd杆长为180 mm。由播种机的工作宽幅及运动空间,确定ef杆长为590 mm,fg杆长为30 mm。
3 田间试验
3.1 试验条件
本文设计的西洋参播种机主要针对山东主产区,试验田长度要大于50 m,垄宽1.6 mm,垄面平整,土壤质地均匀,试验地点选择在山东省潍坊市诸城区树行村西洋参种植区,试验时间为2022年11月15—17日,试验机具为所设计的样机。
3.2 试验方法
作业前,对地块旋耕碎土,并整理垄面,用弧形刮土板沿垄对试验田进行刮土处理,保证作业土壤平整。试验过程由2个人操作机器播种作业10 m,每次试验结束后将种子清除,垄面整平,以进行下一次试验。
由于目前我国尚没有关于西洋参播种机具技术检测的国家标准,参照国家标准GB/T 6973—2005《单粒(精密)播种机试验方法》、农业行业标准NY/T 503—2015《单粒(精密)播种机作业质量》以及农业行业标准NY/T 987—2006《铺膜穴播机作业质量》的试验方法和评价指标,其标准指出,株距为100 mm时,漏播指数不超过25%,重播指数不超过30%,即可记为合格。相关指标计算方法如式(5)~式(7)所示[16]。
合格率
(5)
漏播率
(6)
重播率
(7)
式中:n1——合格穴数;
n2——漏播穴数;
n3——重播穴数;
N——总开穴数。
播种作业后随机选取每垄的10行作为测量区域,记录总开穴数、漏播穴数、重播穴数,并计算漏播率、重播率、合格率。
3.3 试验结果
试验现场观察,机具各杆件联动平稳、运动连贯,各机构间无干涉、卡顿等现象,电机转动顺畅。播深相比人工播种更加均匀,株距控制良好,播种效率及播种质量明显提高。试验结果如表2所示。从表2可以看出,该西洋参播种机的漏播率为4.58%、重播率为2.66%、合格率为92.76%,符合西洋生播种要求及各技术指标要求。
4 结论
1) 针对西洋参播种劳动强度大、效率低、播种装备匮乏等问题,结合山东省弧面垄的种植农艺和西洋参窄密种植模式,确定了圆形种勺型孔、顶推式开穴器及多连杆传动系统组成的西洋参双排播种机。
2) 通过对西洋参种子特征分析,设计了圆形种勺孔型,其直径与高度分别为8 mm、4 mm,其勺柄长为75 mm,安装座宽40 mm。通过对取种机构总成质量估算及对电机扭矩的计算,选择了WS-38ZYT64-R型直流电机作为振动机构。
3) 通过对开穴器在土壤中的流动性分析,确定了其开口宽度、尖端入土深度、总高度、铲体宽度、开口销距尖端距离,分别为9.5 mm、45 mm、130 mm、21 mm及105 mm;通过对连杆机构运动分析,确定了推种机构中ab杆、bc杆、cd杆、ef杆、fg杆长度分别为25 mm、175 mm、180 mm、590 mm及30 mm。
4) 田间试验测得,该西洋参播种机的漏播率为4.58%、重播率为2.66%、合格率为92.76%,符合西洋生播种要求及各技术指标要求。
猜你喜欢
金属加工(冷加工)(2023年1期)2023-02-04
再生资源与循环经济(2021年7期)2021-04-09
水泥工程(2020年4期)2020-12-18
今日农业(2020年22期)2020-12-14
金桥(2020年7期)2020-08-13
家庭医学(下半月)(2020年3期)2020-05-30
基层中医药(2018年1期)2018-03-01
河南工学院学报(2017年1期)2017-06-07
雷锋(2016年4期)2016-05-30
学习月刊(2015年10期)2015-07-09