基于TRIZ理论的果树深松施肥机创新设计*
2023-11-11 04:02杨涛凌宁李晓晓吴柏强张海燕孙付春
中国农机化学报 2023年10期
杨涛,凌宁,李晓晓,吴柏强,张海燕,孙付春
(1.成都农业科技职业学院机电信息学院,成都市,611130; 2.成都大学机械工程学院,成都市,610106;3.成都海逸机电设备有限公司,成都市,610199)
0 引言
TRIZ是由阿奇舒勒在分析大量发明专利的基础上提出的系统性的创新设计方法,至今已经发展成为一套服务技术创新的成熟理论和方法体系,为创造性地发现和解决问题提供了系统的方法工具[1]。专家学者们利用TRIZ理论进行创新设计,并就如何将TRIZ理论与农业装备设计研发有效融合进行了探索[2-3],目前,TRIZ理论已经在农业装备研发中发挥了重要作用。张毅等[4]运用TRIZ理论冲突矛盾矩阵分析以及抛弃与修复的发明原理,完成机器人结构创新设计,实现苹果采摘收集一体化;桓源等[5]运用矛盾冲突解决理论设计苹果分拣套袋装置,减轻果农劳动强度;李金凤等[6]运用TRIZ理论对豌豆割晒机进行创新设计,取得较好的作业效果;付敏等[7]应用物—场模型、技术矛盾、物理矛盾等TRIZ工具求解马铃薯薯土分离输送装置创新方案,设计一种具有双抖动单元和降运抖动筛面的薯土分离输送装置。由此,也掀起一场基于TRIZ理论的农业装备创新设计研究热潮,有效促进了创新方法在中国的应用与发展。
果树施肥机械一直是果园机械研究领域的重点研究方向,常见的果园开沟施肥机械施肥深度一般不会超过40 cm,而成龄果树根系深度通常可达50~80 cm[8]。也就是说,传统开沟施肥机施肥深度相对较浅,不利于树体的抗寒、抗旱、抗病虫害[9]。可见,合理施肥可有效促进土壤中水、肥、气、热的循环,改良土壤环境。果树生长期深层土壤松土追肥对于提升果品产量与品质有重要作用,已然成为果园土壤改良的必然发展趋势[10]。当前,在果树深松施肥方面普遍采用人工挖坑作业或利用手持式钻穴机钻穴作业,不仅作业效率低、劳动强度大,还带来了较高的人工成本。总体上,还尤为欠缺高效率、低成本、易操作的果树根部深层土壤松土施肥机械。基于此,本文运用TRIZ理论提出果树深松施肥创新方案,再基于“冲突解决原理”解决锤击式打穴破土机构中的矛盾冲突,并对深松施肥机气爆发生装置、精量施肥装置等关键结构进行创新设计;最后采用数字模型仿真与样机试验的方法,验证创新设计方案的合理性和可行性,以期为果园深松施肥装备研发提供设计思路与参考。
1 果树施肥存在的问题与TRIZ创新设计流程
1.1 果树施肥存在的主要问题
果园施肥存在的主要问题有:(1)我国果园大多位于丘陵地区,地形地貌复杂多变,要求施肥机械小巧灵活,不利于机械化的发展;(2)现有果树施肥机械存在开沟深度浅,肥料都在土壤上层,使果树根部得不到良好的养分,而开沟过深容易伤害到树根,进而影响到水果产量与品质;(3)长期使用化肥导致果园土壤出现板结现象,而且土壤长期未松动坚实度较大,土壤生物与有机质骤减,不利于果树根部呼吸与营养吸收;(4)未出现成熟的果园松土施肥机械应用案例,传统的手持式钻穴机或锤击式的打穴机构均存在噪声较大、用户体验差等不足。总体上来看,果树人工施肥效率低、劳动强度大;传统开沟施肥机开沟深度浅、易损伤果树根系;长期不当施肥已造成土壤板结,影响果树生长等问题。由此,需要在保证作业效率与不伤害果树根系的同时,一次性完成松动土壤与施肥。
1.2 TRIZ创新设计基本流程
对具体的待解决研发问题,TRIZ解决问题的流程可分为问题描述、分析问题、确定解题方向、解决方案与方案评价几个过程,如图1所示。
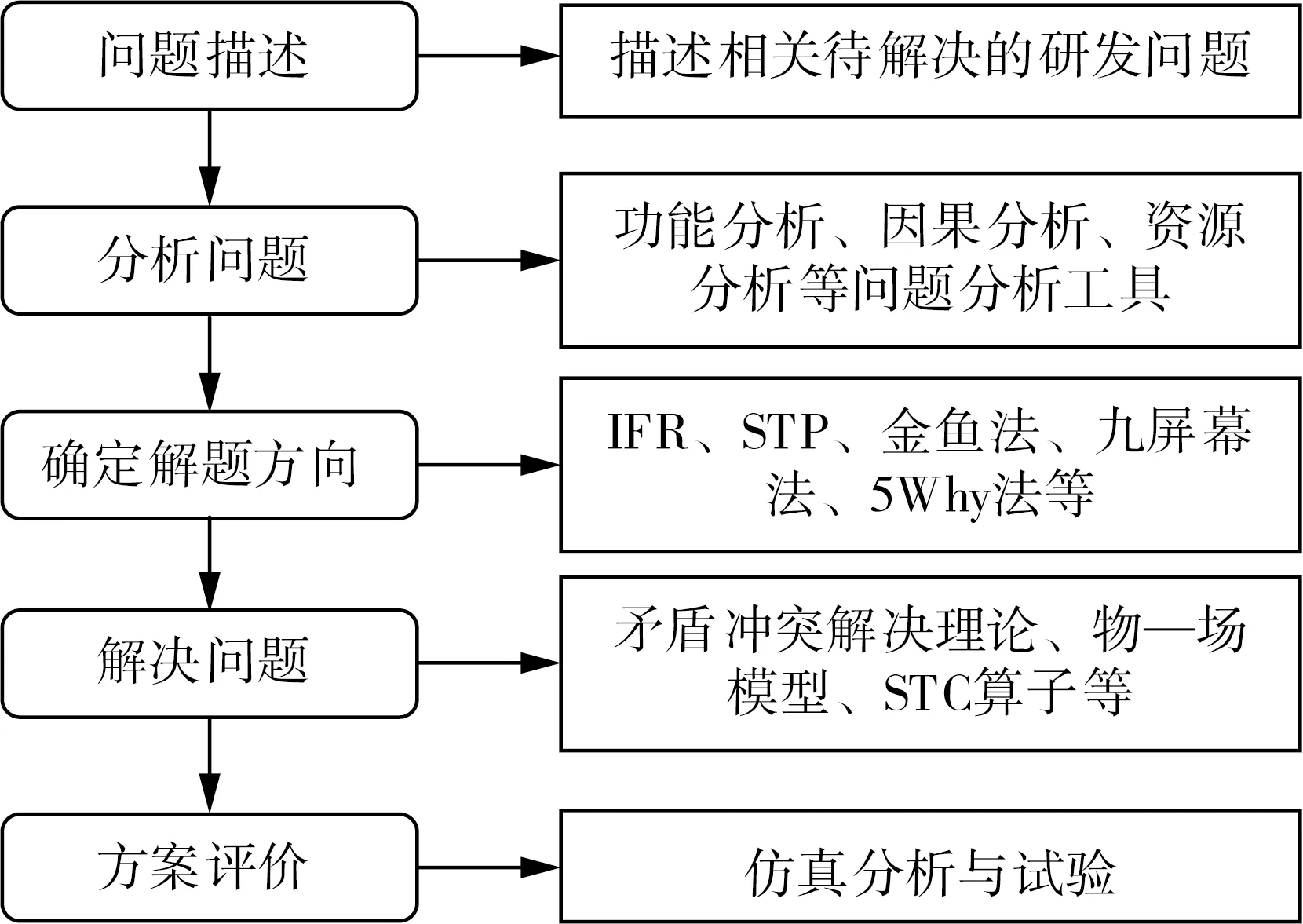
图1 基于TRIZ的创新方案求解流程
1) 问题描述:描述系统功能、工作原理、存在的问题以及解决问题的限制条件等。
2) 分析问题:采用功能分析、因果分析、资源分析、根源分析、鱼骨分析等问题分析工具,分析问题产生的根本原因,找出解决问题的切入点,明确解决问题可利用的资源。
3) 确定解题方向:应用最终理想解(Ideal Final Result,IFR)、技术进化法则、九屏幕法等方法确定问题的解决方向。
4) 解决问题:应用冲突矛盾解决理论、39个工程参数、40个发明原理、STC算子等工具进行方案求解。
5) 方案评价:依托相关仿真分析技术手段,从可行性、经济性、先进性等方面对概念方案进行评价,筛选出最终实施方案。
2 深松施肥机创新设计方案
2.1 应用TRIZ思维问题求解
一方面,需要将一定量的肥料直接输送到果树根部,即施肥深度≥400 mm;另一方面,希望从土壤内部产生一个力,迫使土壤松动或表面出现明显裂纹。针对上述问题,应用TRIZ工具中的最终理想解法与小人法对深松施肥机构进行设计。
2.1.1 基于最终理想解的问题求解
最终理想解法(IFR)是在系统最小程度改变的情况下能够实现最大程度的自服务。依据IFR解题的流程设计深松施肥解决方案如下。
1) 设计的最终目标是什么?肥料能够送入到土壤深处;对土壤施加一个自下而上的力,迫使土壤松动或产生较为明显裂纹。
2) 最终理想解是什么?在不损害果树根系或少破坏表层土壤的情况下,肥料能够自动地进入到土壤深处被果树根部吸收;从土壤内部自动产生一个力,来松动土壤。
3) 达到理想解的障碍是什么?肥料本身不具备运动能力,表层土壤会阻碍肥料的运动,致使肥料无法直接到达果树根部;机械手段难以从土壤内部施加力,以松动土壤。
4) 出现这种障碍的原因是什么?要求提高深松施肥效率、降低劳动强度而不肆意破坏表层土壤,不伤害果树根部。
5) 不出现这种障碍的原因是什么?肥料借助外力直接输送到土壤深处。
6) 创造这些条件时可用的资源是什么?肥料、机械场、重力场、气动场等。
显然,根据可利用的资源中的重力场与机械场,提出概念方案1:预先设置施肥管道,肥料可以依靠自身重力,通过相应的施肥管道进入到土壤深处。
2.1.2 基于聪明小人法的问题求解
概念方案1虽然部分解决了肥料直接送入到土壤深处问题,但是土壤从内部松动问题还未有良好解决方案,而且对于黏重肥料易造成管道堵塞、妨碍肥料吸收等问题。进一步地使用一组能运动的小人来代表问题模型,即小人法进行问题求解。聪明小人法(Smart Little People,SLP)是指当系统内的部分物体不能实现必要的功能和任务时,就用多个小人分别代表这些物体,而不同小人表示执行不同的功能或具有不同的矛盾,重新组合这些小人,使它们能够发挥作用,执行必要的功能[11-12]。
1) 建立问题模型。用不同形状的小人表示各系统组件,构建问题模型,如图2所示。肥料小人在沿施肥管道向土壤深处跑去。该方案还存在问题描述:肥料小人易造成拥堵且无法松动土壤。原因1:没有其他小人来组织肥料小人运动;原因2:肥料小人力气较小,推不动四周土壤。
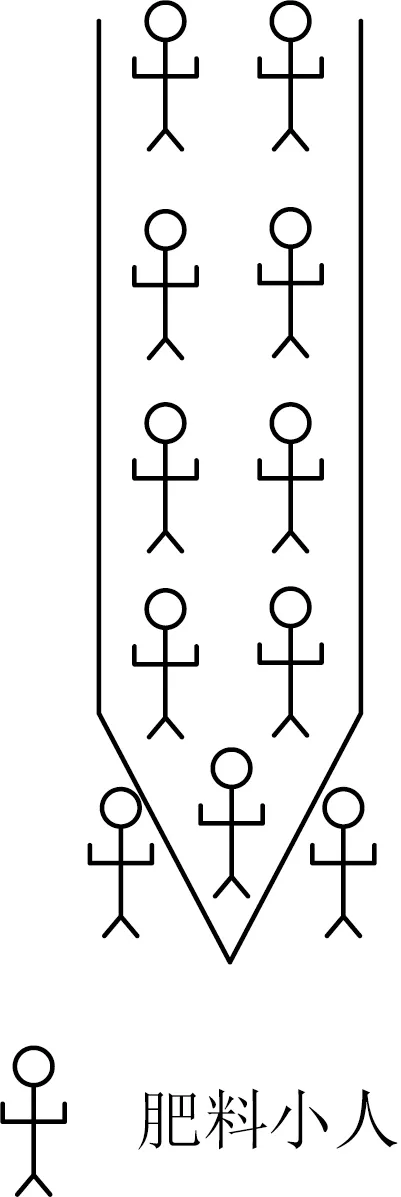
图2 问题模型
2) 建立目标模型。增加输送小人,将肥料小人沿管道运送土壤深处;同时输送小人在管道出口处进入土壤向四周扩散,松动土壤。
3) 建立方案模型。根据目标模型提出方案模型,如图3所示。增加了输送小人,将肥料小人沿管道运送土壤深处;同时输送小人在管道出口处进入土壤向四周扩散,松动土壤。

图3 方案模型图
2.2 创新设计方案
果树深松施肥方案既需要完成施肥,又要完成深层土壤松土的任务。根据TRIZ理论分析得出直接施肥到土壤内部的果树深松施肥概念方案2,如图4所示。
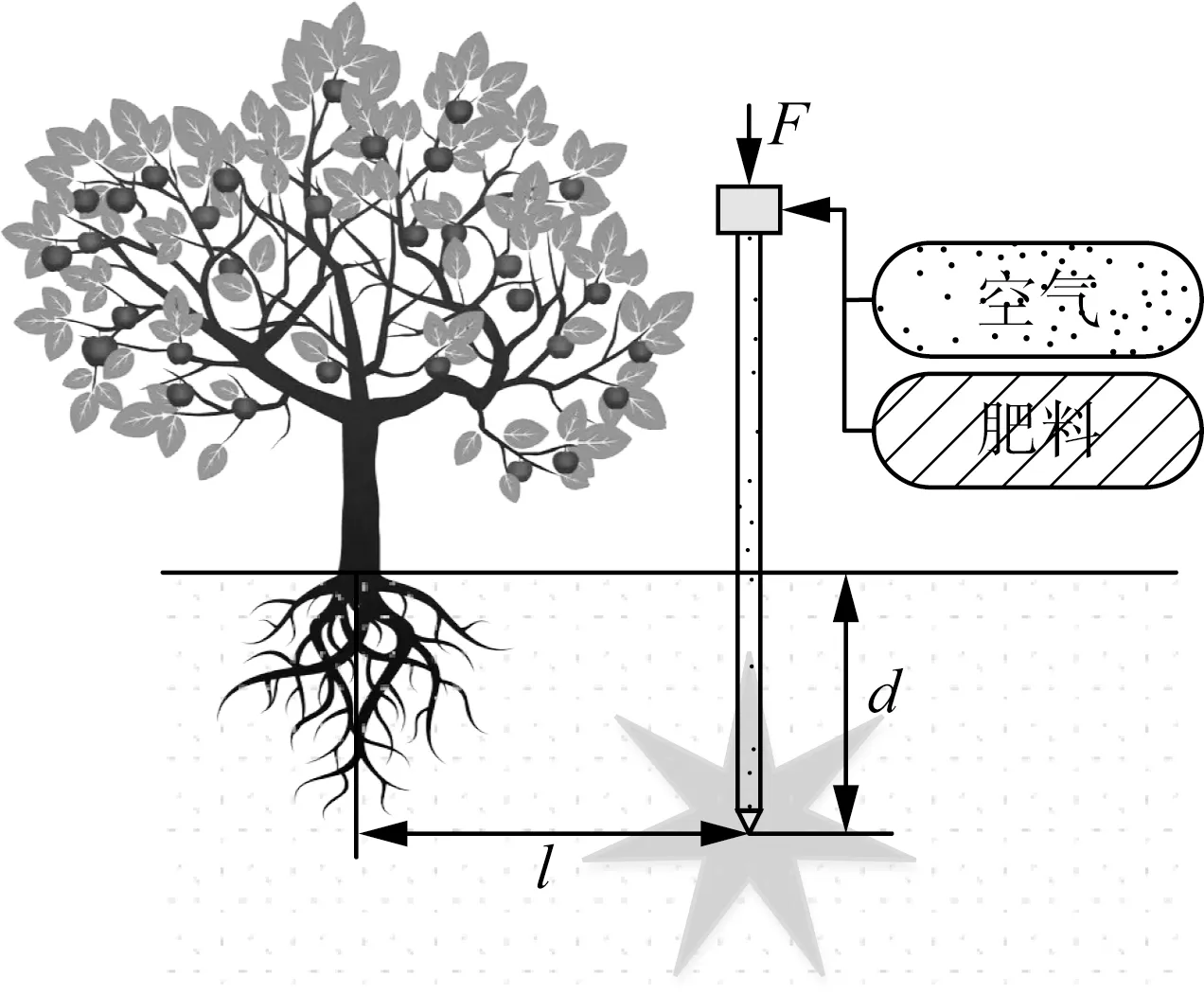
图4 果树深松施肥概念设计方案
首先,使用一根空心的管状物(插管),竖直向下插入土壤指定深度;然后,使用空压机将一定压力的空气从该管状物内部喷入土壤深处,形成气体爆炸以达到松土的目的;最后,将固体肥料沿着相同的路径喷入土壤深处,以达到深施的目的。另外,在高压气流的作用下也可有效防止肥料堵塞的情况。肥料直接施在果树根部,有效防止了肥料的流失,同时高压气流也使得深层土壤松软,有利于果树根部吸收。由此,可认为该设计方案是有效、可行的,能够解决现有施肥机械施肥深度浅、土壤板结等问题。
3 深松施肥机关键部件创新设计
借助TRIZ理论设计的果树深松施肥创新方案(图4),深松施肥机首先需要打穴破土,接着精量取肥,然后高压空气将定量肥料输送到果树根系并依靠高压空气释放过程中产生的震动松动土壤,从而完成一次深松施肥作业。那么,深松施肥机的核心部件由打穴施肥装置、气爆松土装置与精量排肥器构成,以实现果树定点打穴、松土、施肥等功能。
3.1 打穴机构分析
根据创新设计方案,打穴是深松施肥的关键。通常需要较大的力,才能够将插杆插入硬质土壤,同时还要插杆始终保持垂直状态打入和拔出土壤。果树根部土壤常年未翻动,坚实度较大,传统的锤击式破土装置不仅存在破土困难的问题,还存在噪声大、效率低的不足。于是,借助TRIZ矛盾冲突解决理论,对深松施肥机打穴破土机构进行创新设计。
3.1.1 应用TIRZ的问题求解
根据计算冲突理论明确改善和恶化要素,将其转化为TRIZ理论中的39个通用工程参数,然后查阅技术矛盾冲突矩阵找出相应的发明原理解决技术冲突。打穴破土机构需要改进自动化程度低、效率低、噪声大等不足,但是随之而来的是使得施肥机尺寸变大、装置复杂程度增加。应用TRIZ理论的创新设计流程,将矛盾归纳为:NO.-11应力或压力(将锤击的间歇力改变为持续施加的连续力)、NO.-36装置复杂度与NO.-12形状、NO.-36装置复杂程度之间的矛盾。利用TRIZ冲突矩阵定位交叉单元,确定发明原理,如表1所示。
对查询到的发明原理进行分析,了解各发明原理的具体描述,结合打穴破土机构筛选出有价值的发明原理,如表2所示。参考发明原理NO.-19周期性作用、NO.-29气压和液压结构提供的思路,改变打穴破土机构的受力方式,使用液压缸设计多连杆打穴破土机构替代传统锤击式打穴破土机构,不仅能够提升自动化程度与生产效率,还可以降低机器作业时的噪声。

表2 有价值的发明原理释义与应用
3.1.2 多连杆打穴破土机构分析
由此,采用多连杆机构设计了打穴机构,由液压缸、摇臂、升降臂、插杆、滑轨等部件构成,液压缸运动改变了BC杆的长度进而在CE杆的作用下迫使EF杆竖直向下运动以插入土壤中,如图5所示。液压油缸为原动件,其活塞杆伸缩过程中带动油缸BC、摇臂AD分别绕B点、A点做定轴转动,连杆CDE绕支点D运动,插杆EF在导轨的作用下在竖直方向做往复直线运动。
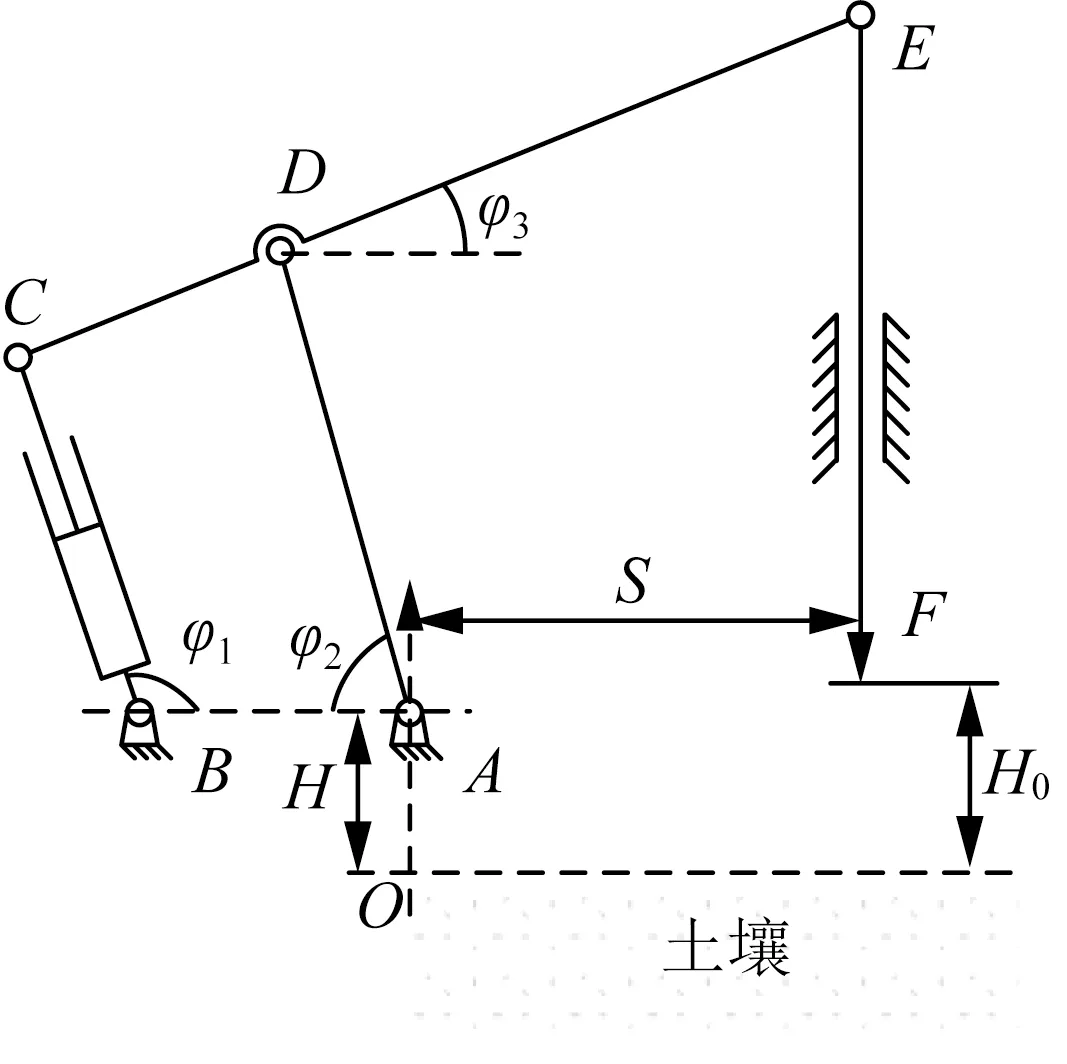
图5 打穴机构运动简图
众所周知,连杆机构中杆件长度是影响其运动规律的关键,为验证打穴机构的运动规律与机构的可行性及打穴深度,就需要计算出各杆件的长度。对打穴破土机构进行运动分析发现,各杆件的运动实际上是由油缸活塞杆伸缩运动引起其他杆件转角、位移等一系列的变化。由此,即可构建相应的函数关系,利用优化设计方法来对目标参数进行优化。以机构中A点为坐标原点,水平方向为X轴,竖直方向为Y轴,由此构建坐标系。那么,A点为支撑点在Y轴上固定不动,水平位移为0,竖直方向上位移为离地高度H,即xA=0,xB=-LAB,yA=yB=H;插杆端点E、F的位移如式(1)和式(2)所示。
(1)
式中:xF——插杆端点F横坐标,mm;
yF——插杆端点F纵坐标,mm;
d(t)——插杆端点F从地面开始打入土壤的深度,mm;
H0——插杆离地距离,mm;
t——打穴入土时间,s;
S——支撑点A与插杆端点F的水平距离,mm。
(2)
式中:xE——插杆端点E横坐标,mm;
yE——插杆端点E纵坐标,mm;
LEF——插杆EF的长度,mm。
图5中支撑点D、C的位移分别如式(3)和式(4)所示。
(3)
式中:xD——支撑杆AD端点D横坐标,mm;
yD——支撑杆AD端点D纵坐标,mm;
LAD——支撑杆AD的长度,mm;
φ2——支撑杆AD与水平方向上的夹角,tanφ2=(yD-H)/xD。
(4)
式中:xC——油缸端点C横坐标,mm;
yC——油缸端点C纵坐标,mm;
LCD——连杆CD的长度,mm;
φ3——连杆CD与水平方向上的夹角,tanφ3=H(t)/(S+xD)。
分别对式(1)~式(4)位移方程对时间求一阶、二阶导数,即可得到图5中点F、E、D、C的速度、加速度方程。
考虑到深松施肥机未作业时需要收起插杆以免碰撞到地面,打穴机构需要安装在履带式底盘上以便于移动作业。也就是说,深松施肥机插杆末端离地距离应大于等于整机最小离地间隙。而且,成龄果树根系发达,要求打穴深度不小于400 mm。那么,根据多杆机构的运动规律与深松施肥作业要求,明确优化目标主要有:(1)插杆最大位移由最大打穴深度与装备最小离地间隙之和不超过600 mm;(2)插杆接触地面时,油缸摆动到最大转角处,即油缸C点运动到最大水平位移处,此时打穴机构安装的最大水平距离不超过800 mm;(3)油缸活塞杆行程小于300 mm;(4)机构运动无任何干涉现象。由此,构建起多连杆机构优化目标函数如式(5)所示。
(5)
式中:ts——开始打穴的时刻,s;
tp——结束打穴的时刻,s;
tc——油缸C点运动到最大水平位移处的时刻,s;
xc——AB杆在水平方向上的投影长度,mm;
LAB——杆件AB的长度,mm;
LBC——杆件BC的长度,mm。
通过SolidWorks建模并做运动分析选择满足机构要求的参数组合,明确各杆件的长度分别为LAB=260 mm、LBC=360~650 mm、LCD=320 mm、LAD=380 mm、LDE=560 mm、LEF=600 mm。另外,考虑到作业效率,要求单次作业(包括打穴入土、施肥、气爆、提起作业)时间小于40 s。那么,就必须在10 s内完成打穴入土作业,也就得到了液压油缸伸长到最大行程过程中的平均速度约为0.03 m/s。再考虑到整机系统的安全性,打穴油缸液压回路最大压力小于等于20 MPa。
3.2 气爆松土装置
气爆松土装置是将空气进行压缩,产生一定的压力以形成高速射流来产生爆破力,以达到松土的目的。气爆松土关键在于利用高压空气瞬时膨胀做功,气爆发生装置如图6所示。
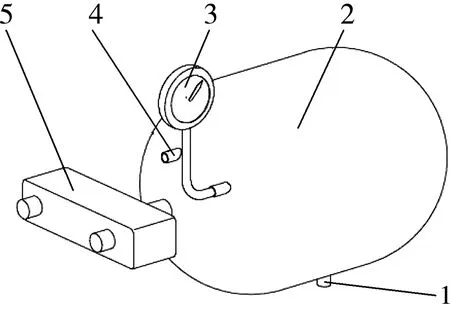
图6 气爆发生装置结构
通过空压机将压缩空气注入高压气瓶内,当高压瓶内达到一定压力时,自动关闭进气阀门,完成充压过程。工作时,操作气爆按钮,放气电磁阀打开,高压气体沿管道瞬间喷出,完成一次气爆过程。高压气体膨胀过程会对周围土壤产生剧烈的震动,从而松动土壤。
显然,出气口的排气冲击力会直接影响到松土的效果与施肥的范围。为提升深松施肥机的作业效果,就要确保高压气瓶排气口具备较高的理论冲击力。依据工程热力学原理,忽略高压气瓶排气过程中压力变化,高压气瓶积蓄压力能后绝热放气过程最大冲击力与高压气瓶出口喷射速度分别如式(6)和式(7)所示。
(6)
(7)
式中:D0——高压气瓶排气口截面直径,m;
P0——高压气瓶内压力,Pa;
P——管道内压力,Pa;
k——空气绝热指数,k=1.4;
ρ0——高压气瓶内空气密度,kg/m3。
在常温25 ℃条件下,计算出高压气瓶内空气密度进而得出气流喷射速度v=500 m/s。再通过式(10)计算出理论上的最大冲击力F=5 600 N。考虑到喷射管道长度以及弯道会对气流产生较大衰减,要求高压气瓶排气口的最大理论冲击力大于6 000 N,才能保证插杆喷口对土壤有足够的冲击压力,进而保障了深松施肥机的作业效果。
3.3 精量施肥装置
精量施肥技术是精准农业重要的组成部分。深松施肥机精量施肥装置采用螺旋送料器,如图7所示。由电机带动螺旋推杆转动,肥料在螺旋轴的作用下逐步运动到出料口,经单向阀暂存储于计量室,高压气流流经计量室时,会把计量室中存储的肥料运送到土壤深处,从而完成一次施肥过程。计量室容积依据常见果树需肥量和气力输送能力确定,计量室注满肥料后即达到单次最大施肥量,查询《粉粒体气力输送设计手册》可知,螺旋送料器的输送量如式(8)所示。

图7 螺旋送料结构
Q=47D2Lsnρφψ
(8)
式中:Q——输送量,t/h;
Ls——加料段螺距,m;
D——加料段螺旋直径,mm;
n——螺旋轴转速,r/min;
φ——送料器倾斜时修正系数;
ψ——物料填充系数;
ρ——物料堆积密度,t/m3。
从式(4)可以看出,在物料、螺旋轴已经确定的情况下,调整电机的转速即可改变螺旋送料器的输送量。由此,即可依据果树实际需要动态调整施肥量,满足果树实际施肥量与用户个性化需求。
4 方案评价与试验分析
对果树深松施肥概念方案进行科学评价,进一步验证有效性。仿真分析与试验是最为常见的创新方案评价方法,仿真结果合理即可进一步采用试验方法验证创新设计方案的有效性和可行性[13-14]。为验证气爆式果树深松施肥机的作业效果,联合成都某企业生产了样机并在崇州市现代农业创新创业科技示范园内梨树种植区选取了10余棵梨树作为试验对象。
试验需要记录打穴深度,以验证施肥深度,保证肥料直接被输送到果树根部,减少流失;还需明确空气压力以验证土壤松动效果。试验中,可以观察插杆上的刻度记录打穴深度从而得到施肥深度。要求每次打穴深度必须大于等于400 mm所在处的红线。另外,结合园区果园土壤结构、坚实度等实际情况与空气爆炸在土壤内部形成的气穴和土壤表面的裂纹等现象来看,以土壤表面是否出现两道以上明显可见裂纹或裂纹宽度大于等于4 mm来判定土壤是否松动[8-9]。试验结果如表3所示。
试验测试了样机打穴深度、气爆松土效果、施肥效果等,均达到了设计要求,基本满足果树深松施肥的要求。另外,试验中验证了深松施肥机在成都及周边地区常见果园中作业时空气压力大于0.6 MPa即可取得较好的松土效果。
5 结论
1) 分析TRIZ理论解决工程问题的具体流程,运用IFR与SLP法提出了果树深松施肥机械创新设计方案,借助冲突矛盾矩阵解决锤击式打穴破土系统技术矛盾,查询冲突矛盾矩阵表,得到周期性、气压和液压结构两个有价值的发明原理,基于此设计了多连杆打穴破土机构,较好地解决了传统锤击式打穴破土机构效率低、人力劳动强度大、噪声大等不足。
2) 进一步地完成了深松施肥机气爆发生装置、精量施肥装置等关键部件详细设计。深松施肥机可在免耕情况下一次性地完成松土、施肥作业,大幅提升作业效率。通过建立SolidWorks三维数字模型仿真分析与样机试验分析,以打穴深度≥400 mm、土壤表面明显可见裂纹数量≥2道或裂纹宽度≥4 mm为评价指标对创新设计方案进行评价,验证设计方案的可行性与合理性。试验结果表明,深松施肥机在成都及周边常见果园中作业时空气压力大于0.6 MPa即可实现较好的深松施肥效果。为果园深松施肥机械研发与土壤改良奠定了技术基础。
猜你喜欢
小猕猴智力画刊(2023年4期)2023-10-10
今日农业(2022年1期)2022-11-16
农业工程学报(2022年1期)2022-03-25
机械工程与自动化(2022年1期)2022-03-15
装备维修技术(2021年42期)2021-03-15
今日农业(2020年23期)2020-12-15
机械工程与自动化(2018年3期)2018-06-04
山西农业大学学报(自然科学版)(2017年4期)2017-05-16
农家科技中旬版(2016年12期)2016-04-16
江苏农机化(2015年6期)2015-12-07