
基于BP神经网络PID控制的风机风量控制研究
2023-12-11 12:54张春雨
安徽科技学院学报 2023年6期
周 爽, 张春雨, 陈 伟
(安徽科技学院 机械工程学院,安徽 凤阳 233100)
目前,国内学者对堆肥通风控制已有一定的研究,大多采用曝气通风控制系统对污泥、污水的发酵实现通风量的控制[5-6]。中国作为农业大国,好氧堆肥历史悠久,但对通风设备的配套装备控制技术的研究较晚,与发达国家相比差距较大。污泥堆肥的原料、通风方式等与畜禽粪污堆肥方式有一定差异,粪污堆肥风机风量始终是非线性等变化,同时严重滞后[7],采用常规PID实现对风机风量的控制存在一定问题,不能满足对此类复杂系统进行控制,导致堆肥自动化程度低,生产周期长。
因此,为进一步优化好氧堆肥通风控制系统,本研究基于Matlab软件平台,利用BP神经网络优化PID学习算法,实现PID参数的在线自整定,对控制系统实现风量的实时调节,可提高好氧堆肥通风机的运行效率,增强鲁棒性和容错能力。
1 好氧堆肥通风控制系统组成与原理
好氧堆肥通风方式分为自然通风、定期翻堆通风、被动通风和强制通风[8]。自然通风是指直接将预处理的发酵物料在特定的地面堆成条垛状,借助自然风实现氧气与物料的自然接触,该发酵方法不仅会致使肥料转化率低、堆肥周期长,而且会严重影响环境。定期翻堆通风是借助自然风的前提下进行定期翻堆,实现定期局部供氧的目的,但翻抛过程中产生的恶臭气体对环境造成了严重的危害,与生态发展理念不符;被动通风是通过空气进入堆体内的通风管实现的近似于自然通风的一种方式,但由于该方法无法准确控制通风量变化而不被采纳;强制通风是由风机和通风管道通过机械通风系统对堆体强制通风实现供氧,且可以实现对供氧风量的控制,该方法可除湿降温且发酵完全,一定程度上可减少臭气分子产生[9]。
本研究采用的强制通风方式的控制方案如图1所示,系统硬件组成包括氧气等各类传感器、信号变送器、可编程逻辑控制器(PLC)、变频器、风机、上位机,系统中通过比较氧气浓度的设定值与实际测量值的偏差量,采用BP神经网络PID算法实现参数自整定,由PLC作为控制核心发出指令控制变频器,进而实现控制风机风量的目的。控制系统结构包括传统PID控制器和神经网络两部分,通过神经网络的自身学习能力与加权系数的调整实现对传统PID三个参数调整的过程,并得到最佳的控制规律。
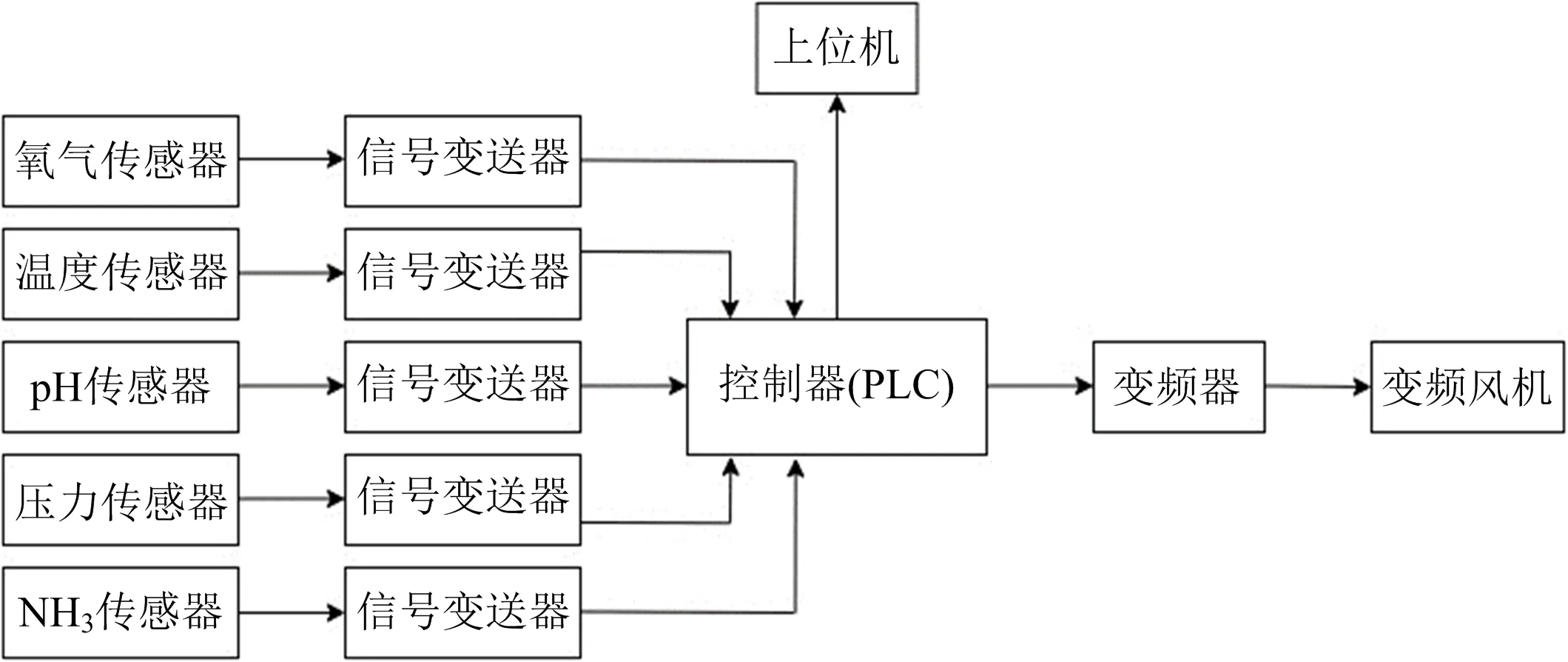
图1 通风控制系统Fig.1 Ventilation control system
2 传统PID算法
PID控制是通过调整比例、积分和微分等3个参数以取得满意的控制效果[10],在具体控制时,需要根据不同的控制对象选取不同组合,因其具有原理简单、稳定性强等特点,被广泛应用于无法准确建立被控对象数学模型的工业控制中。图2为传统PID控制原理图。然而在不同的频段PID控制器的作用不同[11],低频段,PID积分部分可以提高系统性能稳定性;中频段,PID微分部分显著增加系统的动态特性;高频段,PID 微分部分则显著增加系统高频增益,从而大大降低系统的耐高频干扰能力,关于这一缺点,可以通过调整其他参数来避免。为此,本研究利用BP神经网络自身调节权系数调节PID三个参数,实现好氧堆肥最佳的风机风量控制。
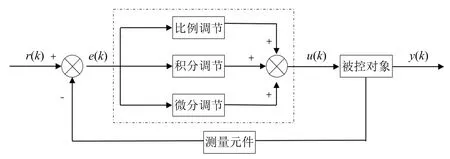
图2 传统PID控制系统Fig.2 Traditional PID control system注:r(k)为系统输入量;u(k)为控制器输出;y(k)为实际输出量;e(k)为实际测量值与设定值的偏差。
将e(k)作为控制器的输入量,则它们之间的关系为:
e(k)=r(k)-y(k)
(1)
在连续系统中PID控制算式为:
在扭矩限制器装配完成后,要求将联轴器装在标定设备上进行标定,如果标定过程中发现实际打滑扭矩与要求值偏差超出允许范围,需要重新调整螺栓的上紧扭矩。
(2)
在计算机系统实现中写成:
(3)
其中,e为风机风量目标值与检测温度实际值的偏差;Kp为比例系数,Ki为积分时间常数,Kd为微分时间常数。
3 BP神经网络PID控制器设计
BP神经网络是一种按误差逆向传播算法训练的多层前馈神经网络,可实现正反两方向的传播,由输入层、隐含层和输出层等3部分组成[12],通过各层节点神经元的传递建立相应的函数关系,各个神经元在处理信息时相对独立,分别接受输入,经过作用后产生输出。正向传播用于数据和信息的处理,逆向传播采用梯度下降法对权值和偏差进行反复迭代训练的自我学习方式达到最初的期望值[13],建立完整的数据分类识别结构来提高结构的稳定性(图3)。
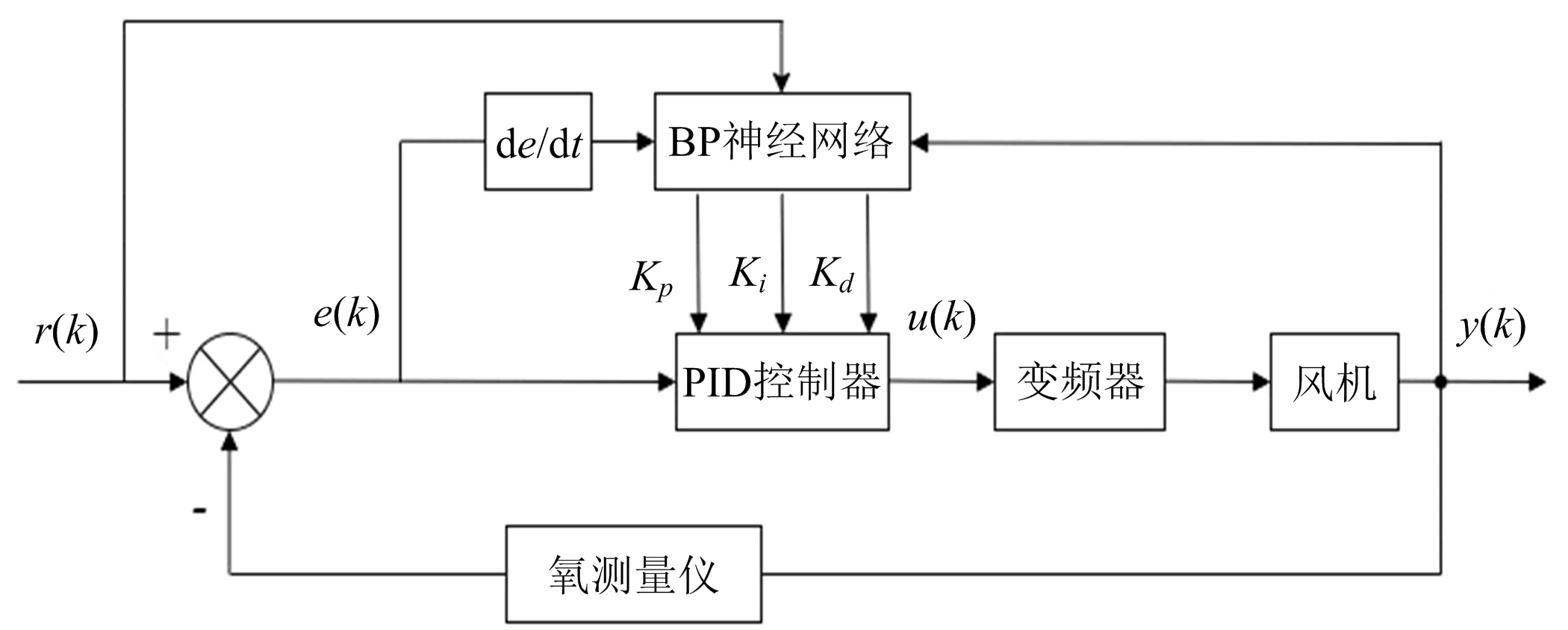
图3 BP神经网络PID控制系统Fig.3 Block diagram of BP neural network PID control system
本研究采用3-5-3的3层BP神经网络结构(图4),由输入层、隐含层、输出层和众多神经元组成,其中i表示输入层神经元节点,j表示隐含层神经元节点,n表示输出层神经元节点,wji(k)、wnj(k)分别表示隐含层权值和输出层权值,r(k)、yout(k)、e(k)分别表示目标输入值、实际输出值和误差值,通过仿真试验对比分析,最终确定隐含层数量为5,根据实际输出值Kp、Ki、Kd确定输出节点数量为3。
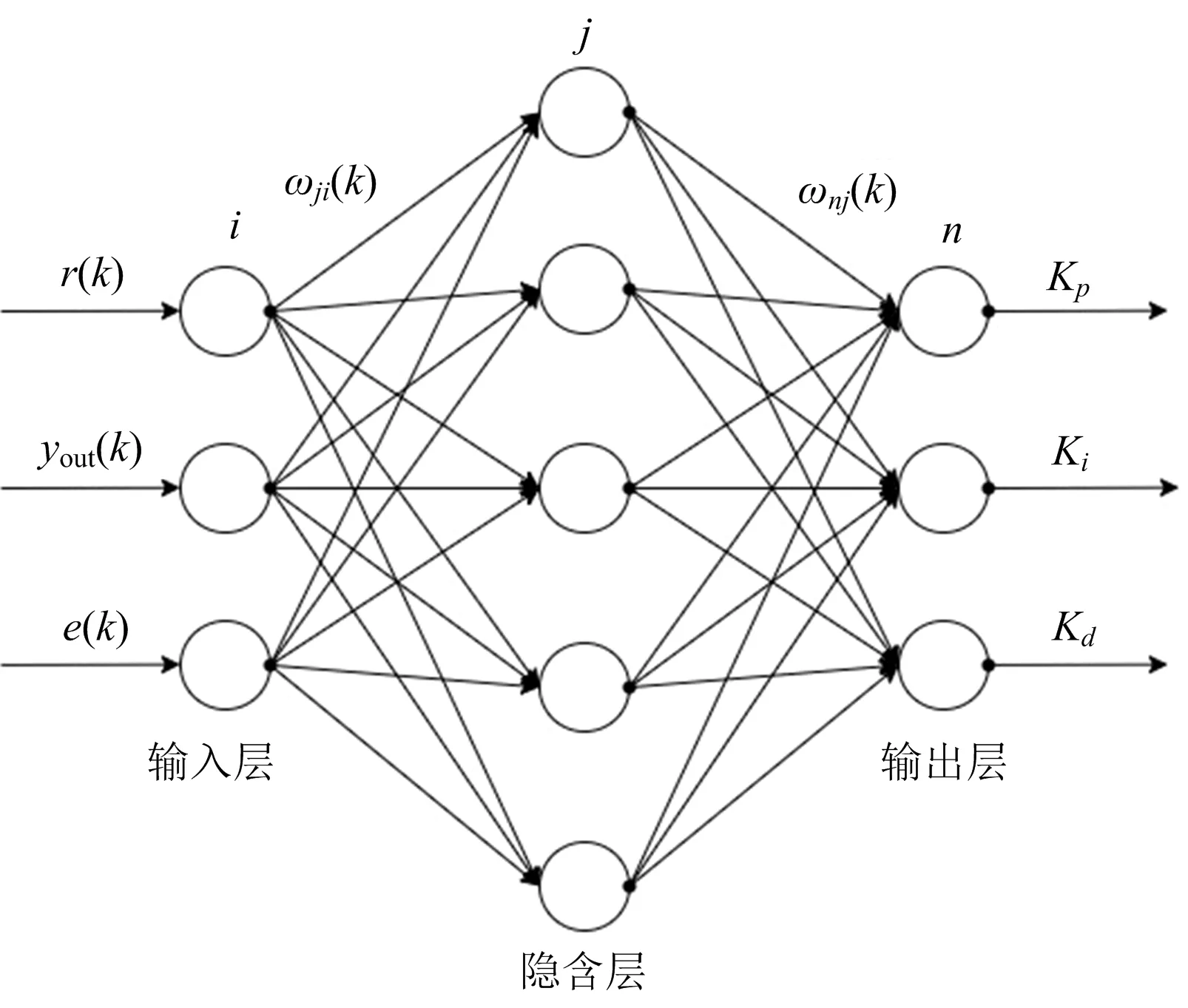
图4 BP神经网络结构Fig.4 BP neural network structure
BP神经网络的输入层输入:
(4)
隐含层网络节点输入、输出:
(5)
(6)
(7)
神经网络输出层的输入、输出:
(8)
(9)
(10)
其中,rp、yp分别表示设定的理想值和实际检测值。按照梯度下降法多次迭代修改网络层权值,同时附加全局极小的惯性项使搜索速度快速收敛:
(11)
(12)
其中,η、α分别表示学习速率与惯性系数。
经典增量式数字PID的控制算法为:
U(k)=U(k-1)+ΔU(k)
(13)
ΔU(k)=Kp[e(k)-e(k-1)]+Kie(k)+Kd[e(k)-2e(k-1)+e(k-2)]
(14)
由式(9)、(14)求得:
(15)
(16)
(17)
进而可以得到输出层权值的学习算法:
(18)

(19)
隐含层加权系数学习算法:
(20)
(21)
其中,g′(Δ)=g(x)[1-g(x)],f′(Δ)=[1-f2(x)]/2。
4 试验仿真
为验证设计的控制器性能,本研究基于2021a版MATLAB Simulink平台对好氧堆肥的通风控制系统进行仿真分析[14-15]。
4.1 建立仿真模型
根据畜禽粪污好氧堆肥的特点,为保证堆肥环境最佳、微生物活性最强、风机风量12 m3/h效果最好,选取12 m3/h作为系统控制的稳态值。根据风量度控制需求,变频器决定电机转速,根据上文分析,针对风机风量控制系统选取1个二阶惯性系统[16],风机与变频器的近似数学模型如下:
(22)
为避免PID控制系统的3个参数为负值,采用Sigmoid函数对神经网络各层输出输入进行计算,根据取值原则以及多次仿真试验,经过优化后的PID参数取值分别为Kp=1、Ki=0.03、Kd=1.2,同时取神经网络的输入采样时间T=0.02、惯性系数α=0.2、学习速率η=0.2,其中神经网络中的每一层权值初始值在[0,1]区间取值,且保证随机性。在MATLAB平台Simulink模块中搭建传统PID、模糊PID和神经网络PID仿真模型,系统模型如图5所示,设定通风速率为单位阶跃信号,仿真时间为600 s,并在系统运行300 s时外加人工干扰,以检验系统的抗干扰性。
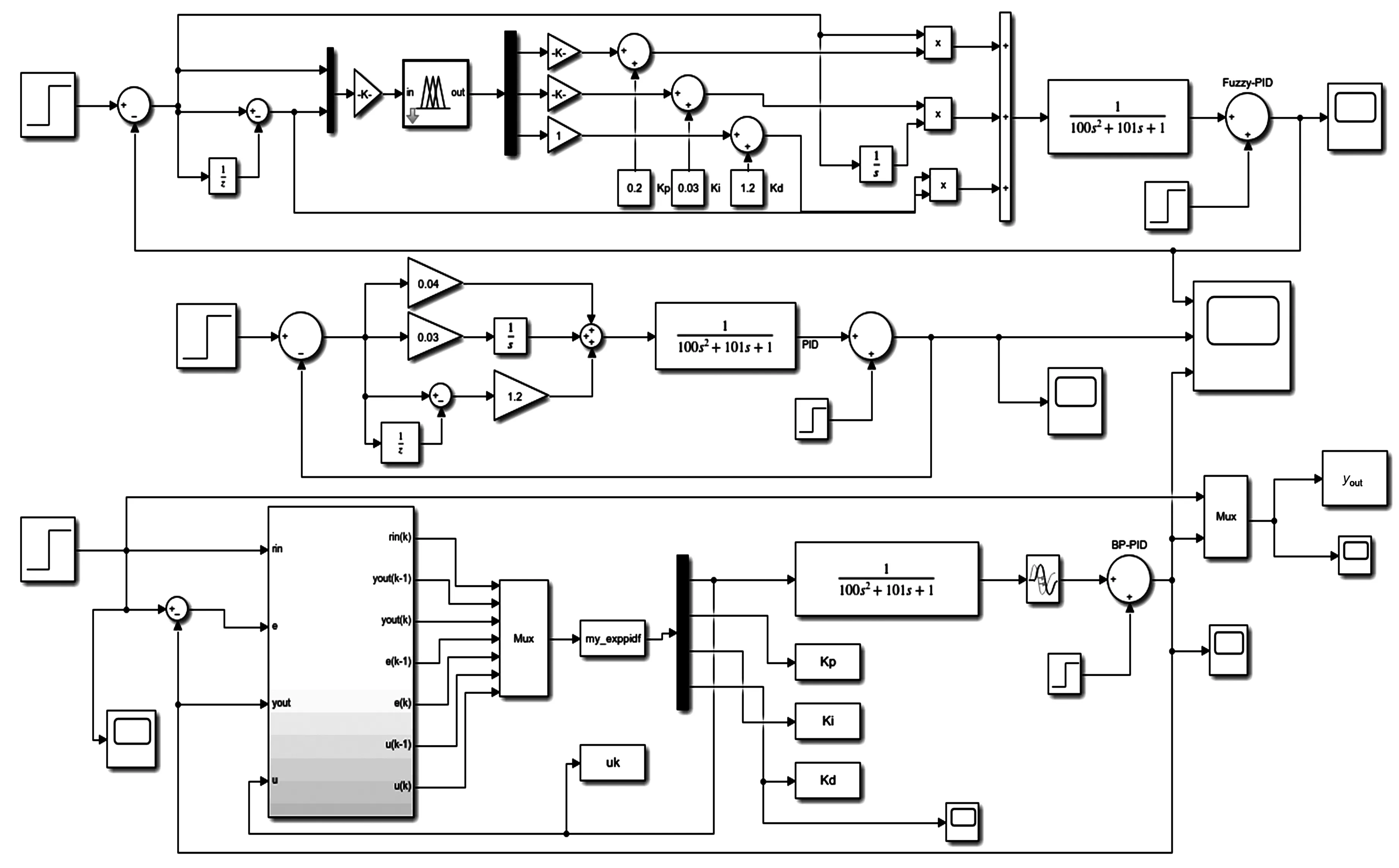
图5 传统PID、模糊PID、BP神将网络PID Simulink仿真模型Fig.5 PID Simulink simulation model of traditional PID, fuzzy PID and BP god general network
4.2 仿真结果分析
通过搭建图5模型得到阶跃响应图(图6)。传统PID控制下的稳态误差σ1≈36%,经过上升时间tr1=102 s,稳态时间ts1=296 s,峰值时间tm1=190 s;模糊PID控制下的稳态误差σ2≈31%,经过上升时间tr2=283 s,稳态时间ts2=296 s,峰值时间tm2=179 s;BP神经网络PID控制下的稳态误差σ3≈23%,经过上升时间tr3=70 s,稳态时间ts3=226 s,峰值时间tm3=131 s。
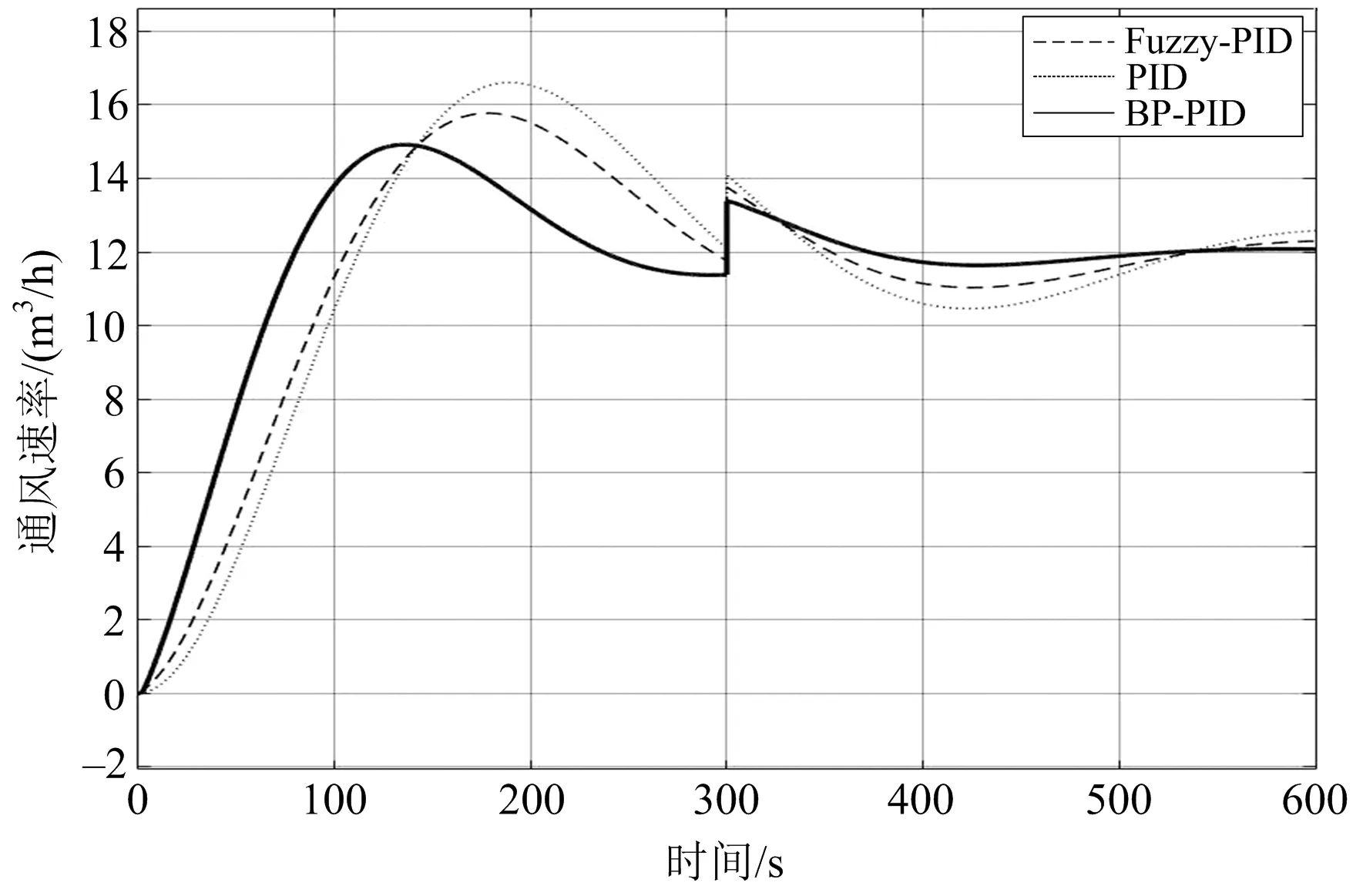
图6 风机风量3种控制方法阶跃响应对比Fig.6 Comparison of step response of three control methods of fan air volume
由此可见,在BP神经网络PID控制下,系统超调量减小,与其他2种控制方法相比稳态误差分别减小13%和8%,稳态时间缩短70 s。在系统受到外界干扰时,传统PID控制与模糊PID控制发生明显超调,BP神经网络PID控制可较快恢复到稳态值,同时未发生明显振荡,既能很好地克服风机非线性对好氧堆肥风机风速控制的影响,又能加强稳态特性,提高系统的鲁棒性。
5 结论
本研究为提高好氧堆肥速率,降低臭气产出率,以好氧堆肥通风为研究对象,分析了BP神经网络理论,同时结合传统PID控制算法与BP神经网络,通过神经网络学习算法自整定PID方法仿真分析了BP神经网络PID控制器,MATLAB仿真分析结果表明,与传统PID控制、模糊PID控制相比,基于BP神经网络PID控制算法实现了更优的控制效果,实现稳定的时间更短,系统响应速度快、抗干扰能力强,极大提高了好氧堆肥风机风量控制,为好氧堆肥曝气通风在智能控制的总体设计提供了一定依据,可以考虑作为一种控制策略加以应用。
猜你喜欢
大电机技术(2022年3期)2022-08-06
成都信息工程大学学报(2022年3期)2022-07-21
核科学与工程(2021年4期)2022-01-12
煤气与热力(2021年4期)2021-06-09
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
中华戏曲(2020年1期)2020-02-12
自动化学报(2017年7期)2017-04-18
广西电力(2016年1期)2016-07-18
山西煤炭(2015年4期)2015-12-20
中国设备工程(2014年1期)2014-02-28
