改进的晶圆测距图像清晰度评价方法
2023-12-21 15:35梁汉濠张雷
宜宾学院学报 2023年12期
梁汉濠,张雷
(江苏理工学院 电气信息工程学院,江苏常州 213000)
基于机器视觉的半导体晶圆测距定位方法可以提高晶圆自动化生产效率和产品质量,日渐成为智能制造领域的关键技术之一.机器视觉的核心是数字图像处理技术,晶圆测距定位使用数字图像处理技术实现自动聚焦,其关键步骤是有效的图像清晰度评价[1].理想的清晰度判价函数所得到的图像应是最高峰值的两侧呈现单调下降的趋势,有无偏性、单峰性、灵敏度高、下降趋势明显、高效性等特点[2-3].目前,常用的图像清晰度评价函数有很多,大致可以归结为: ①灰度梯度函数[4-7],主要利用正焦图像比离焦图像的边缘更锋利,灰度变化更明显等特征,包括绝对方差函数、Roberts 梯度和函数、梯度向量平方函数、Brenner 函数、Laplacian 函数、Tenengrad 函数和Variance 函数等;②熵函数,主要利用正焦图像的信息熵比离焦图像多的特征;③频域函数[8-11],主要利用傅立叶变换、小波变换等方法,通过比较正焦图像与离焦图像的高频分量,高频分量较多的是清晰图像.基于这些评价函数得到的图像清晰度评价算法成为实现自动聚焦和解决晶圆自动化加工定位的关键.
传统的图像清晰度评价方法大多基于图片整体,对于晶圆自动化加工过程中的针尖图片清晰度的判断并不准确,并且最清晰图片与其他图片的差异性并不明显,产生双峰极值相近的状况,这种状况会导致对最清晰点的判断不准确,且容易受到其他因素的干扰,降低设备整体的准确性和重复性.本文拟在此基础上改进清晰度评价算法,通过对高亮区域识别,以高亮面积的中心为起点,向外采用双阈值分隔的方法得到每隔一个像素点的像素灰度值,最后计算不同阈值内像素点的灰度值差异,同时计算高亮部分的面积并作为评价物体是否在准确位置的一个重要参数,在计算清晰度时采用多通道计算,增加整体结果的抗干扰性.
1 传统的清晰度评价函数
传统的清晰度评价算法多是基于图像整体灰度值提出的,包括灰度值函数法、统计函数法以及频谱函数,区别主要是对灰度信息的利用方式不同.
1.1 灰度梯度评价函数
灰度梯度评价函数主要针对图像灰度来套用指定的卷积模板以表征图像的清晰度.假设图像I的尺寸为M×N,图像I中某像素点(x,y)的灰度值为f(x,y).常用的灰度梯度函数如下.
能量梯度函数计算公式为:
其中:I为当前图像,I(x,y)为图像中像素点(x,y)像素值.
Tenengrad 梯度函数采用Sobel 算子[12]提取水平和垂直方向上的梯度值,图像清晰度计算公式如下:
其中:T为边缘检测设好的阈值,Gx和Gy分别是像素点(x,y) 处Sobel 水平和垂直方向边缘检测算子的卷积.
有时清晰聚焦的图像有着比模糊图像更大的灰度差异,所以可以将绝对方差函数作为评价函数,计算公式如下:
其中f(x,y)为图像每个像素对应的灰度值,u为图像的灰度值的平均数.该函数对噪声较敏感,图像噪声越小,所得到的值越小.
灰度值算法的一般流程是:先遍历图中每个像素的灰度值,然后根据公式将每个灰度值代入计算,最后均值化得出图片的清晰度.
1.2 统计函数
传统统计函数法多是基于灰度直方图中灰度带的变化大小反映清晰度,图像清晰度量化值通常定义为一个Range函数:
其中Hk表示灰度级为K的直方图的值.
统计函数算法的流程为先选取相同灰度值的灰度带,然后根据灰度带极大值与极小值之间的差异来得出图像的清晰度.
1.3 频谱函数
频谱函数主要依赖于大多数图像细节集中在高频成分的理论依据,依靠采集需要检测图像中的高频分量来评价图像清晰程度.目前提取高频分量的方法有傅里叶变换、拉普拉斯变换或者小波变换.小波分析函数[13]先通过特殊的高通滤波器获得图像的高频信息:
其中:I为当前图像,I(x,y)为I在(x,y)处的像素值,**表示2 维卷积,G0表示相应的空域高通滤波器,计算如下:
然后在全图范围内,对高频信息的能量进行累加即可以得到最后的评价函数:
1.4 熵函数
熵函数基于清晰图像较模糊图像携带更多信息量的事实依据,计算出一幅数字图像的信息熵,然后将其用于评价该图像的清晰度.对于一幅图像,图像能量E(I)和图像熵H(I)分别定义为:
由香农信息理论可知,当E(I)一定时,H(I)越大,则图像越清晰.
2 引入高亮面积要素的清晰度评价算法
传统的灰度算法和统计学算法在晶圆测距的应用上效果并不理想,因为传统算法对于针尖这种只占整体图片中少部分的物体识别出的灰度差异并不明显,并且对于全图的传统算法容易受到其他干扰因素的影响.因此本文在此基础上提出一种基于高亮面积的清晰度评价算法.在基于灰度函数法清晰度评价之前,考虑插入高亮面积要素和使用双阈值分割方法进行图像预处理.
2.1 插入高亮面积要素
由于在实际使用中相机拍摄的针尖图片的面积大小能够在一定程度上反映出针尖的清晰度,并且还能够借此判断针尖是否处在焦距外,因此在清晰度评价算法中插入高亮面积作为一个重要的评价要素十分必要,且提取高亮面积还可帮助确定针尖位置缩小计算范围.
2.2 双阈值分割法
本文提取高亮面积的方法采用简单的阈值分割法,根据图片的特征要素选用规定的阈值筛选出高亮的部分,并测算其面积;同时使用第二次阈值分割去除一些无特征因素的边缘像素值.经过两次阈值分割将图片最关键最有效的部分突显出来单独处理,对两次阈值分割留下来的部分,即在两个阈值中间的像素点采用绝对方差法计算他们的清晰度值.把计算出来的值作为最后清晰度的另一个评价因素,最后将得到的所有值进行图像化平均.公式如下:
其中:d为用来评价图像清晰度的值,a为测算出来的高亮面积,u为双阈值提取出来部分灰度的平均值,x和y为图片的长和宽,f(x,y)为每个像素对应的灰值.
2.3 算法流程
步骤1:对采集到的图片进行第一次阈值分割筛选出图片中的高亮部分.测算高亮部分面积并得出得到它的中心.
步骤2:以已得到的高亮面积中心为圆心取一个半径为10 个像素(由针的宽度确定)大小的区域作为清晰度评价的有效区域.
步骤3:在此区域里进行第二次阈值分割剔除图片中亮度过低的无效像素点,将第二次阈值分割得到的图像和第一次阈值分割的图像做差,去除高亮面积的部分,得到新的区域.因为高亮部分的面积差异值过小,代入计算会影响图片的整体清晰度评价.
步骤4:在新的区域内,对区域里的像素点采用绝对方差法即公式(4)测算清晰度.
步骤5:最后根据公式(10)给出最后的评价值d.
3 基于改进算法的晶圆测距流程
晶圆测距系统主要依靠自动化聚焦方法即借助成像系统的物像共轭关系,通过选择高精度伺服电机控制镜头移动,移动过程中用相机拍摄多张探针图像,人工观察图像会由模糊到清晰再到模糊[14].利用改进的清晰度评价算法对每一幅图像的清晰度进行计算,并与高精度伺服电机控制的机构坐标系相互对应,保证每一张图片对应一个伺服电机运动过程中的位置,因为相机在一般工作状态下的焦距和像距为一个定值,那么通过聚焦测距法测得的最清晰图像对应的物距便是一个确定的值[15].工作流程如图1所示.
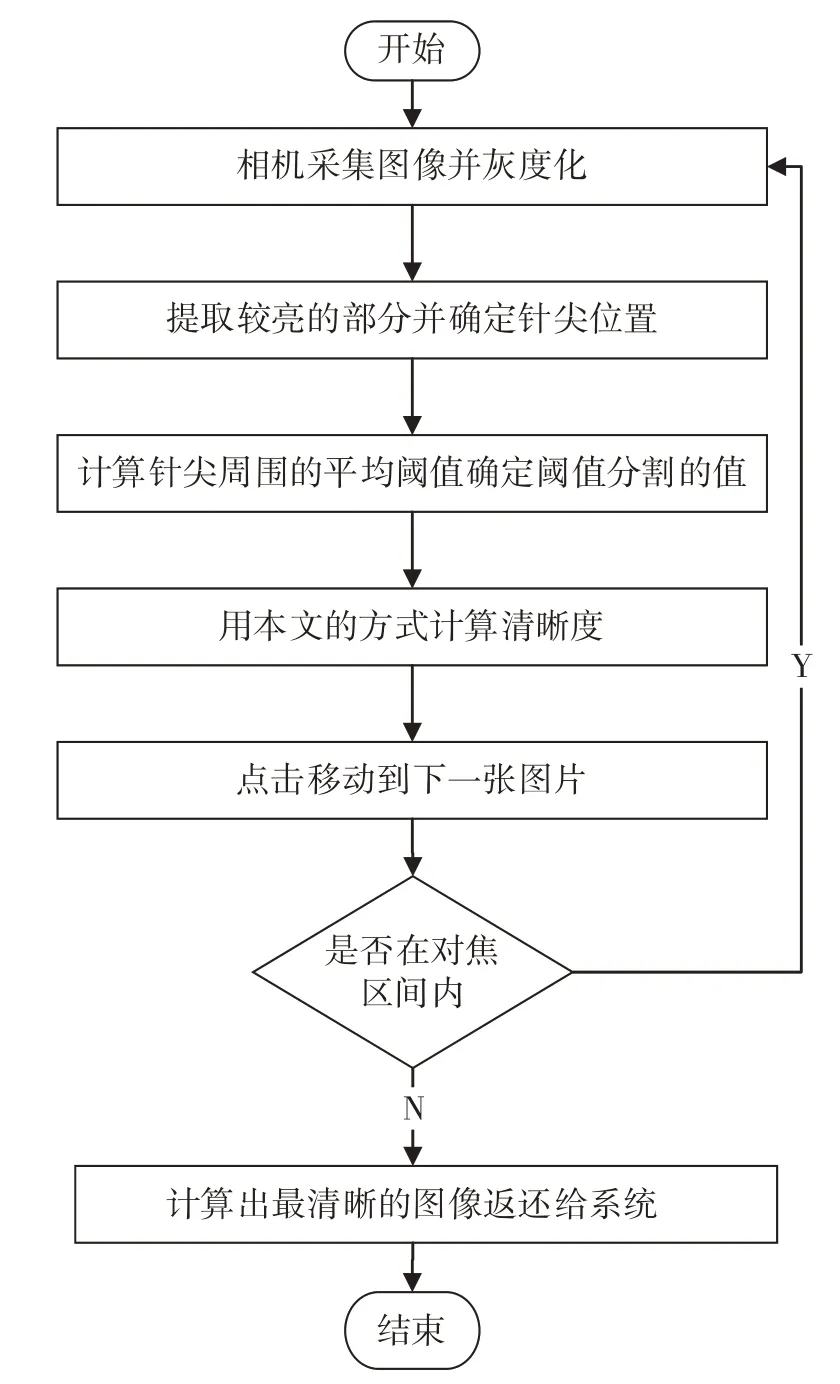
图1 实现的基本流程
测距流程可归纳为:先通过晶圆上的相机采集针尖的图片并灰度化,然后提取较亮的部分确定针尖位置,计算周围的平均阈值确定阈值分割的值,接着通过本文的算法计算图像清晰度值,计算完将数据保存,电机移动拍摄下一张图片.如果当高亮面积提取不到即判定针尖已不在对焦区间停止工作.最后通过之前的数据给出图片清晰度最高的位置,并将其返还给系统.
4 测试结果和算法对比分析
为了说明本算法在对实际的针尖图片清晰度评价方面的优势采用方差法、Laplace 法、Energy 法、Brenner 法以及本文提出的方法对实际测距过程中采集到的10 张图片进行清晰度评价,并将评价的结果制作成图表,进行对比.针尖组图如图2所示.

图2 针尖组图
由图3 五种算法的对比可得:首先本算法和传统算法所得的最清晰图片都是第6 张,可以佐证本算法的正确性.然后本算法与传统的四种方法相比较峰值更加明显,每张图片之间清晰度差异更大,更加利于寻找最清晰图像.其他四种方法不仅有峰值,还会出现局部极值,局部极值的大小和峰值非常接近.因为会有一些不可避免的补光影响,很有可能会导致寻找到的最清晰的图片不是第6 张图.这样的情况会导致晶圆测距时的重复性降低,对后期结果的调试和软件最后作出的补偿有极大的影响.与之相比,本文提出的方法即使面对微小干扰也不会影响峰值的选取,突出的峰值可以很好地保证多次实验的测算的重复性.
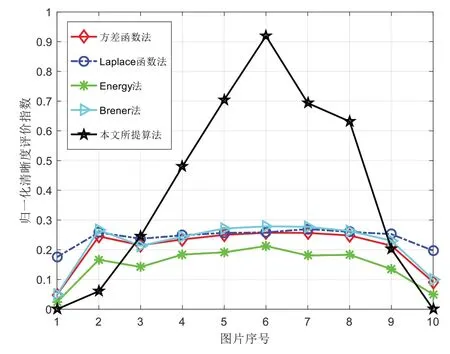
图3 各种方法对比
通过与传统的清晰度算法相对比发现在对针尖清晰度评价方面,引入高亮面积的方法得到的清晰度曲线更加峰值化,单峰性更好,差异性更加明显.并且在此方法中采用了双阈值分割可以让程序自动追踪并划定区域范围大小可以帮助均值化更简单,差异更大.从对比中可以看出清晰度评价方法在晶圆全自动加工的实际应用方面效果更加显著.另一方面整体的结果与传统算法一致,从侧面证明了此种算法的正确性.从传统算法对于针尖清晰度的评定图像中看出各图片清晰度差异不明显,容易出现双峰化,导致极值缺失,测量不出最清晰的位置.就无法保证测距的准确性,双峰化的另一个弊端在于无法保证每次实验的重复性,因为实际工作过程中两个清晰度相近的峰都很容易被作为最清晰的位置.与之相比本文所提出的方法图像清晰度峰值更加明显,极值更加突出,可以表明此方法来实现晶圆自动化加工的测距,更加精准,重复性更好.
在清晰度评价所需时间方面,因为抓住针尖清晰度图片的特性,优先对全图有效的像素点进行了筛选,所以本文所提出方法所需时间将少于其他传统清晰度算法.本文一共测试了五次需要的具体时间,对比如表1所示.

表1 各种方法时间对比
经过五次时间测试,本方法所需要时间远少于传统算法时间,比最快的Energy法快40%左右,进一步提高了自动聚焦的速度.
5 结语
本文针对晶圆自动化加工中的聚焦测距法在实际应用过程中针尖图片具有的有效面积较少、干扰较多的特点,充分利用针尖高亮要素,突出灰度值差异,在此基础上提出引入高亮面积的清晰度评价算法,与传统方法进行了对比.结果表明:本文所提出的方法比传统算法峰值化更明显;在晶圆自动化加工的测距方面能获得更加精准的数据,能够为整个设备的精度提供更好的保障.未来将经过多次实验确定不同针尖的高亮因素影响因子,使得算法更加完善.
猜你喜欢
计量学报(2022年11期)2022-12-20
家庭影院技术(2020年11期)2020-12-28
电子制作(2019年14期)2019-08-20
知识经济·中国直销(2017年11期)2017-11-28
少年文艺·开心阅读作文(2017年7期)2017-08-05
艺术评论(2017年11期)2017-03-29
女士(2016年6期)2016-05-14
学生天地(2016年33期)2016-04-16
声学技术(2014年2期)2014-06-21
华东理工大学学报(自然科学版)(2014年4期)2014-02-27