混合驾驶环境下交叉口空间资源动态控制方法
2023-12-28 02:53蒋贤才徐慧智
交通运输系统工程与信息 2023年6期
蒋贤才,徐慧智
(东北林业大学,土木与交通学院,哈尔滨 150040)
0 引言
美国市场研究机构勒克斯研究报告显示,预计2030 年全球范围内将出售约1.2 亿辆自动驾驶汽车,中国约占35%,人机混合驾驶时代即将来临。自动驾驶也为解决交通拥堵问题提供了一种途径,但道路交通拥堵疏解的关键在交叉口。
近年来,基于CAV (Connected-automated Vehicle)轨迹的可控性和CHV(Connected Humandriven Vehicle)速度的可诱导性,人机混合驾驶环境下交叉口时空资源优化配置已成为国际交通控制方向的研究前沿和热点问题。优化对象从传统的信号相位及配时(Signal Phase and Timing,SPaT)优化转变到CAV轨迹与SPaT的分阶段优化或联合优化,同时优化目标呈现多样化,如交叉口通行效率、CAV轨迹的平滑性、能源效率、环境效益等,但核心问题归结为CAV 的轨迹优化。如Guo 等[1]提出一种基于动态规划法和启发式算法的优化方法,以在混合CHV和CAV环境中获得接近最优的信号控制方案与CAV轨迹;Pourmehrab等[2]提出一种基于车辆轨迹控制的实时算法,旨在协同优化车辆的轨迹与信号控制参数;Yao 等[3]提出孤立交叉口交通信号和车辆轨迹的联合优化框架,以减少汽油消耗和交通排放;李柏[4]基于多车初始位置、行驶目的及约束条件,对多车的轨迹进行求解;并研究了集中式MVMP(Multi-Vehicle Motion Planning)的大规模复杂约束与求解效率;王润民等[5]以智能网联汽车与网联人工驾驶汽车混行的交通场景为研究对象,提出基于滚动优化的交通信号—车辆轨迹协同优化控制方法;刘天天等[6]构建智能网联环境下交叉口混行车队通行模型;刘春禹等[7]以自动驾驶车辆燃油消耗最小、通行效率最大为目标,构建人机混合驾驶环境下自动驾驶车辆轨迹优化模型,以对车辆进行动态轨迹规划和控制;庞明宝等[8]提出不妨碍公交车优先通行,满足换道动机和换道安全条件的智能网联车借道公交车道的控制策略。
现有研究中,既有将CAVs 与CHVs 在交叉口进口车道中分离行驶的,如Rey 等[9]提出通过专用车道将CAVs 与CHVs 分开,在现有信号相位上设置一个仅供CAVs 使用的蓝色相位,在蓝色相位里通过优化CAVs的轨迹和进入交叉口的时间以防止冲突车辆碰撞;也有将CAVs 与CHVs 平等对待混合通行的,如Niroumand等[10]基于Rey和Levin的思想提出白色相位及其信号控制方法,当多个方向均出现CAV领头的车队时,插入一个白色相位,通过优化带队CAV 的行驶轨迹,使各个方向的车队安全通过交叉口,但该方法无需CAV专用车道,CAVs与CHVs 在进口车道混合通行。在优化配置CAV专用车道方面,除宗芳[11]通过交通仿真界定不同CAV 比例、进口道车道数、交通量和信号配时方案组合情况下交叉口进口CAV专用车道的设置条件外,其他研究鲜有涉及CAV专用车道的适用条件,且已有研究对CAV 专用车道的配置都是静态的。面向实时交通需求和交叉口几何条件的多样性,建立一种通用且动态的交叉口CAV专用车道优化控制方法,对完善交叉口信号控制理论、提升人机混合驾驶环境下交叉口时空资源利用效率具有重要的实用价值。
1 CAV专用车道动态配置方法
Bahrami 等[12]研究表明,混合驾驶车道(CAVs与CHVs 均可使用)的饱和流率受CAV 渗透率影响,即
式中:Sl,1为车道组l中CAV 专用车道的饱和流率(pcu·s-1);Sl,2为车道组l中人工驾驶车道的饱和流率(pcu·s-1);Sl,3为车道组l中混合驾驶车道的饱和流率(pcu·s-1);pbl为车道组l中车道b的CAV渗透率。
从式(1)可以看出,混合驾驶车道的饱和流率并非随CAV渗透率线性增长,将CAV和CHV分离行驶会有助于提高车道组(进而相位)的饱和流率,但需考虑不同类型车道绿灯时间利用率的平衡,否则会降低交叉口的控制效率。
假设所有车辆均为网联车,进入交叉口交通信号控制机通信范围内(5G 在密集的市区可靠通信距离大约在300~400 m),其速度、位置、加速度等信息可实时获取。在混合驾驶车道上,CAV跟驰前车(CHV 或CAV)行驶;在CAV 专用车道上,则优化CAVs 轨迹实现安全、高效通行。CAV 无专用交通信号,绿灯期间,相位内所有CAVs和CHVs均可进入交叉口。进口车道功能指示器用来显示每条车道的功能,安装在交通信号控制机通信范围的边界位置,以便在转换车道功能时,CAVs与CHVs有充足的变道空间。
定义L为交叉口所有车道组的集合,Bl为车道组l中全部车道的集合,Ba,l、Bh,l和Bm,l分别为车道组l中全部CAV 专用车道、人工驾驶车道、混合驾驶车道的集合。Ibl为车道组l中车道b(b∈Bh,l或b∈Bm,l)上的全部车辆集合,Abl为车道组l中车道b∈Ba,l上的全部CAV集合。图1为交叉口示例。

图1 交叉口示例Fig.1 Example of supervising intersection
车道组l中车道变量(bl,1,bl,2,bl,3)的分配取决于未来一段时间CAV渗透率与交通流量的预测结果,信号配时参数(gl,k)由车道组l中全部车辆在时间tibl时的位置(xibl)和速度(vibl)等信息优化得到,加速度(aibl)用来控制CAV的运动轨迹。
1.1 优化目标
以交叉口全部车道组饱和流率最大为目标,同一车道组内不同类型车道流率比均衡为约束,建立的优化目标函数为
当bl,1≠0 且车道组l中的车道条数不小于2时,CAV专用车道、人工驾驶车道、混合驾驶车道由内至外的配置需满足
式中:bl为车道组l中的车道条数;bl,1为车道组l中CAV 专用车道的条数;bl,2为车道组l中人工驾驶车道的条数;bl,3为车道组l中混合驾驶车道的条数;Vbl为车道组l中车道b∈Bl的交通流量(pcu·5 min-1);γl为车道组l中CAV右转车比例;σ为车道组l中评判每车道交通流是否均衡的阈值。
式(2)中,通过合理分配车道功能来实现车道组l饱和流率最大;式(3)用来约束车道组l中不同类型车道上的流率比要均衡,若同一车道组中不同功能车道的流率比不均衡,会导致信号配时参数在满足最大流率比车道的同时,低流率比车道绿灯时间空耗;式(4)为车道数量约束。
1.2 CAV专用车道动态分配方法
定义绿灯时间有效利用率(el)与转换指数(Cl)建立车道组l的动态车道分配方法。
(1)当车道组l中有CAV专用车道时
el用车道组l中CAV 专用车道的绿灯时间有效利用率代替,即
式中:hbl为车道组l中车道b的饱和车头时距(s);gl,k为第k周期车道组l的绿灯时长(s)。
转换指数确立方法为
式中:ε1为低饱和度阈值;ε2为高饱和度阈值。
式(6)和式(7)表明,当车道组l中车道b∈Ba,l的el处于低或高水平时,转换指数加1;否则,转换指数重置为0。式(6)和式(7)用于确定何时重新分配车道组l中的车道。相关研究表明,当相位饱和度超过0.9时,交叉口容易发生交通拥堵[13];而当相位饱和度低于0.6时,进口车道又未得到充分利用[14],这些研究成果同样适用于我国道路交通环境,如在《交通管理与控制》教材中,交通信号优化配时将流率比之和上界限定在0.9。本文中,绿灯时间有效利用率与相位饱和度相当。这表明,el>0.9 时,进口车道交通需求过高,故有必要重新分配车道功能,以增加车道组l∈L的饱和流率来降低el,避免交通拥堵。同时,当el<0.6 时,CAV 专用车道的有效利用率低,也需重新分配车道功能,以均衡不同类型车道的交通负荷。因此,本文中ε1=0.6,ε2=0.9。
当重启服务于未来信号周期的车道功能分配时,需要预测未来一段时间各车道组的交通流量与CAV 渗透率。满足精度要求的预测模型其预测的时间步长一般不小于5 min[15]、大于1 个信号周期。本文采用基于张量的方法(Tensor-based Approach)[16]来预测短时交通流量和CAV渗透率。
为避免在一个时间步长内重复预测,重新开启车道功能分配的时间间隔应不小于预测数据的一个时间步长。因此,本文用3 作为转换指数的阈值。即Cl,1=3 或Cl,2=3 时,车道组l将依据式(2)~式(4)重启车道功能的划分,然后重置Cl,1=0或Cl,2=0。
(2)当车道组l中无CAV专用车道时
el用车道组l中人工驾驶车道与混合驾驶车道的绿灯时间有效利用率代替,即
若该车道组中的车道条数不低于2 且式(9)中Cl=3,则重启车道功能的划分。
按照上述方法确定下一信号周期需变换某一车道组内车道功能时,及时更新车道功能指示器显示内容,至于滞留在车道上的CHVs 或CAVs,因位于同一车道组内,车道功能的转换并不改变交通流的流向和受同一绿灯信号控制的结果,在下一信号周期中清空。
2 CAV轨迹与信号配时参数协同优化算法
2.1 约束条件
(1)信号配时
式中:gl,max为车道组l的最大绿灯时长(s);gl,min为车道组l的最小绿灯时长(s);Il,k为第k周期车道组l的绿灯时间间隔(s);i为车道组l中车道b上的车辆序号;xibl(t)为时刻t车道组l中车道b上车辆i的位置(s);tl,k为第k周期车道组l绿灯开启时刻(s);d1为车道功能指示器与停车线之间的距离(m);hbl为车道组l中车道b上的饱和车头时距(s);Tl为车道组l的启动损失时间(s)。
式(10)为信号周期约束,式(11)为车道组l的绿灯时间范围约束,式(12)用来确保绿灯(gl,k)不小于车道功能指示器与停车线之间排队车辆的消散时间,当人工驾驶车道/混合驾驶车道转变为CAV 专用车道时,清空车道内全部CHVs。
(2)车辆轨迹
式中:vibl(t)为时刻t车道组l中车道b上车辆i的速度(m·s-1);aibl(t)为时刻t车道组l中车道b上车辆i的加速度(m·s-2);aacc为最大加减速度(m·s-2);vmax为最大限速(m·s-1);vmin为最小限速(m·s-1);Δt为一个时间单元。
式(13)和式(14)为车辆速度和位置更新遵循的基本运动方程;式(15)和(16)则将CAVs的速度和加速度限制在允许的范围内。
(3)车辆跟驰
Panwai等[17]对Helly建立的跟驰模型进行了改进,以与现实世界的真实交通数据相一致,即
式中:dv为车辆长度(m);ds为跟驰时相邻车辆的安全距离(m);τh为HV/CHV 的反应时间(s);α1,α2为系数。式(17)中,第1 项考虑了前车和跟驰车辆间的相对速度,第2项考虑了连续车辆间的相对距离。本文人工驾驶车道和混合驾驶车道上CHV轨迹则依据式(17)进行更新。
CAV与前车需保持安全距离,该距离是安全车间距ds、车辆长度dv和CAV 反应时间内行驶距离τavibl(t)的函数,即
式中:τa为CAV的反应时间(s)。
2.2 协同优化算法
(1)基于CAVs可控轨迹优化相位绿灯时长
首先,估算CAV专用车道上第i辆CAV抵达交叉口停车线的最短时间,模型为
式中:vcross为通过交叉口停车线的目标车速(m·s-1)。
式(19)表示从时刻tl,k起车道组l中车道b上第i辆CAV 在无前车干扰的情况下从位置xibl(tl,k)到达交叉口停车线所需的最短时间。在式(19)中,第1 种情况对应仅有加/减速或减/加速过程,无匀速行驶阶段;第2种情况,第1部分为加速过程所需时间,第2部分为从匀速到目标速度的减速过程所需时间,第3部分为匀速行驶时间。式(20)中,考虑了前车阻挡情况下第i辆CAV 从位置xibl(tl,k)到达交叉口停车线所需的最短时间,能整合成饱和车队的,CAVs以饱和车头时距相继离开停车线;无法整合成饱和车队的,表明其之前的车辆对该CAV 自由行驶无干扰,式(19)的计算结果即为最短时间。
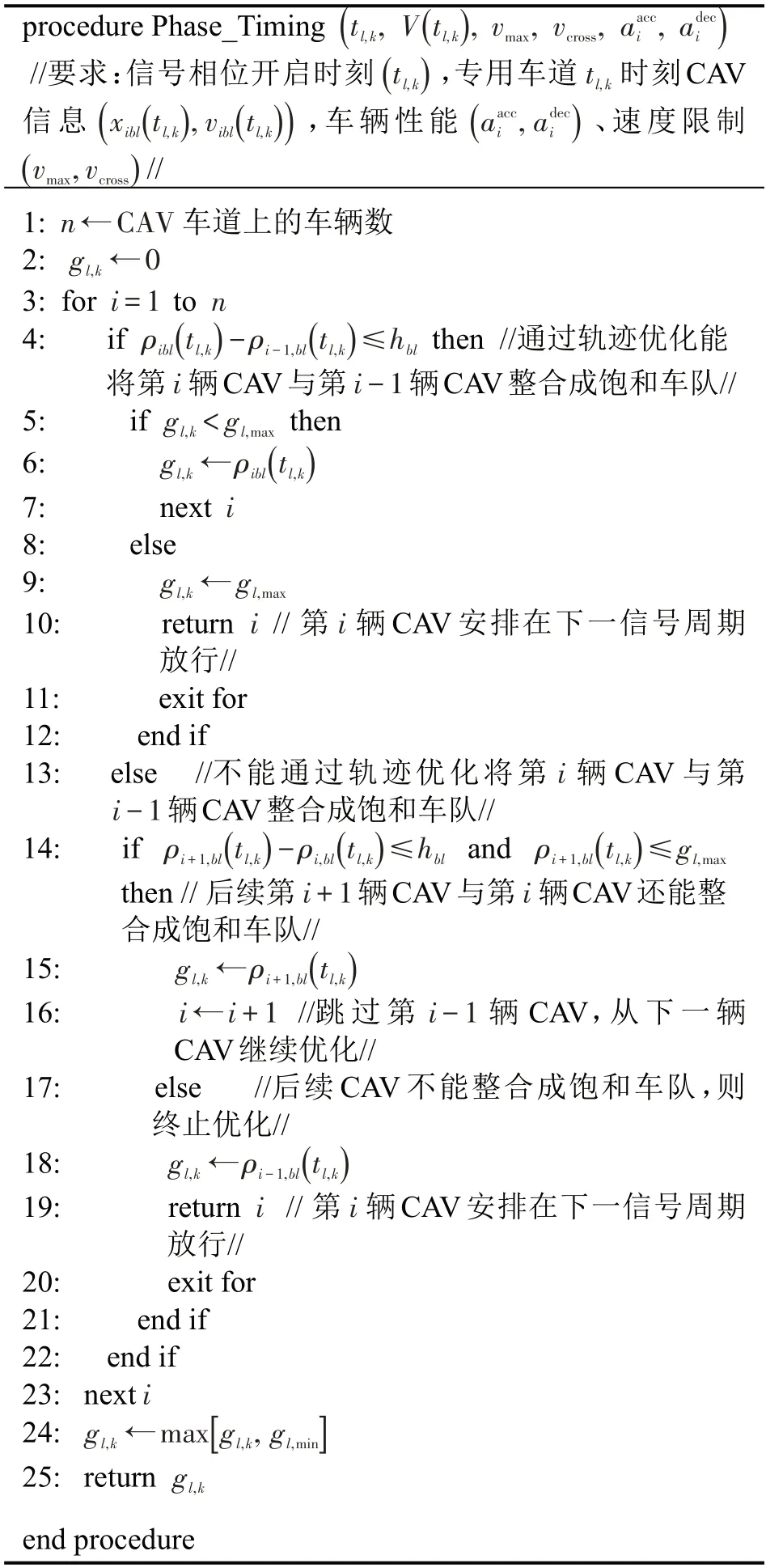
依次计算车道组l在绿灯启亮时刻tl,k车道b上第i辆CAV 与第i-1 辆CAV 各自到达交叉口停车线所需的最短时间。若ρibl(tl,k)-ρi-1,bl(tl,k)≤hbl,则表明能将第i辆CAV 与第i-1 辆CAV 整合成饱和车队,此时绿灯时间延长至ρibl(tl,k),继续考察第i+1 辆CAV 与前车能否整合成饱和车队?若ρibl(tl,k)-ρi-1,bl(tl,k)>hbl,表明不能将第i辆CAV与第i-1 辆CAV整合成饱和车队,此时考察第i辆CAV是否为另一个饱和车队的头车?若是,只要绿灯时间未达到最大绿灯时长,则绿灯时间延长至ρi+1,bl(tl,k),然后从第i+2 辆CAV开始再依次考察能否整合成饱和车队;若不是,绿灯时间至ρi-1,bl(tl,k)结束,第i辆CAV及其后续车辆安排在下一相位放行。以此确定相位绿灯时长的一个选项,同时按“启动损失时间+饱和车头时距×排队车辆数”测算同车道组内人工驾驶车道和混合驾驶车道所需的绿灯时间,取两者最大值作为优化的相位绿灯时长。
相位绿灯时长优化算法如下。
(2)基于绿灯时长划分CAVs 队列并优化行驶轨迹
若ρibl(tl,k)≤gl,k且ρi+1,bl(tl,k)>gl,k,则车道组l中车道b上的第i辆CAV 为本相位放行的最后一辆车,优化其行驶轨迹以便能顺利通过交叉口停车线;后续车辆安排在下一信号周期放行,以进入速度运行至停车线后等待。
若车道b上的第i辆CAV 已经是交通信号控制机通信范围内的最后一辆车且ρibl(tl,k)≤gl,k,则下一辆进入通信范围的CAV仍可能满足在绿灯期间通过交叉口停车线的条件。则设ti+m,bl为第i辆CAV 之后第m辆CAV 进入通信边界的时刻,其到达交叉口停车线所需的最短时间为
式中:nl为交通信号控制机通信边界距交叉口停车线的距离,本文取300 m;ti+m,bl为车道组l中车道b上车辆i+m进入通信边界的时刻(s)。
若ρi+m,bl(tl+m,bl)≤gl,k-(tl+m,bl-tl,k)且ρi+m+1,bl(tl+m+1,bl)>gl,k-(tl+m+1,bl-tl,k),则该CAV 为本相位放行的最后一辆车,其轨迹同样需要优化以便能顺利通过停车线。后续进入车道的车辆安排在下一信号周期放行。
为充分利用绿灯时间,CAVs 被控制在距停止线d处的位置排队,如图2 所示,以便在绿灯开启前,CAVs有加速的空间,绿灯亮起时第1辆CAV带领车队正好以目标车速到达交叉口停车线。实际利用了红灯时间来抵消CAVs的启动损失时间。基于上述CAVs 队列划分,绿灯启亮前(式(24)),后续每一辆CAV 以其前CAV 为跟驰目标,根据式(13)~式(18),采取匀加减速度优化其行驶轨迹,使其以目标车速排队离开停车线,如图3所示。

图2 CAV专用车道的排队位置Fig.2 Queued position of CAV-dedicated lane

图3 CAV轨迹控制Fig.3 CAV trajectory control in CAV-dedicated lane
位置d需满足
式中:d0为第1 辆CAV 到达目标车速行驶的距离(m)。
在绿灯亮起前,第1辆CAV提前启动的时间为
式中:a1为车辆期望加速度(m·s-2)。
2.3 求解方法及流程
本文采用分枝定界法求解式(2)。从式(2)可以看出,最有利的解是车道组l中所有车道均为CAV专用车道,这构成了解空间的上限;最不利的解是车道组l中所有车道均为人工驾驶车道,这为解空间的下限。解空间的上下限构成了初始的搜索空间。每次搜索解时,用一个中间解将搜索空间缩小1/2。中间解确立如下:第1 次CAV 专用车道数取车道组中车道条数的1/2(均向下取整),以后每次搜索CAV专用车道数取上一次搜索空间上下限CAV专用车道条数之和的1/2,当搜索空间不再变化时,则搜索空间的下限即为CAV 专用车道的条数;当上下限CAV 专用车道条数之和的1/2 小于1 时,则置CAV专用车道为0,此时车道组l中全部车道均为混合驾驶车道。然后判断中间解是否满足式(3)和式(4)的要求。如果满足,则中间解和搜索区间的上界形成新的搜索区间;否则,新的搜索区间由中间解和搜索区间的下界组成。如此反复,可快速求解式(2)。优化流程如图4所示。

图4 求解流程Fig.4 Flow chart describing solution
3 仿真设计
3.1 基本条件
Bahrami 等[12]的研究表明,CAV 专用车道的饱和流率为人工驾驶车道的2 倍及以上。为便于仿真结果分析时标准统一,本文相关参数取值参考文献[2,10,18],具体如表1 所示。基于VISSIM 中COM 组件,依据本文提出的方法开发一套算法用来更新车辆轨迹并在CAV/CHV与信号控制器之间交换信息。在VISSIM中的车道上设置交通流检测器,采集每辆车进入路段的时间和速度,每0.5 s 采集一次,车辆加速度、速度和位置也每0.5 s更新一次。

表1 本文参数值Table 1 Value of parameters in this study
以图1交叉口为例,假设其东南西北各进口路段的长度分别为550,450,400,450 m,小时交通流量如表2所示,CAV的右转率为0.03。初始车道功能配置为1 条混合驾驶左转车道、1 条CAV 专用直行车道、1 条人工驾驶车道和1 条混合驾驶直行与右转共用车道。

表2 小时交通流量Table 2 Traffic volume per hour (pcu·h-1)
3.2 仿真设计
本文设计了4 种仿真方案进行对比分析。方案1为全感应信号控制,车道功能按照本文提出的方法进行优化配置;方案2 同样为全感应信号控制,但所有进口道均为混合驾驶车道;方案3 为本文提出的优化策略。Niroumand等[5]提出的白色相位优化策略,用作既有交通信号与轨迹优化控制的对比研究。基于双环结构确定相位优化方案,全感应信号控制单位绿灯延长时间取2 s,检测器距停车线24 m。
4 结果与讨论
4.1 结果分析
交通仿真结果如表3~表5所示,括号中的百分比为本文提出方法较方案1的变化程度。
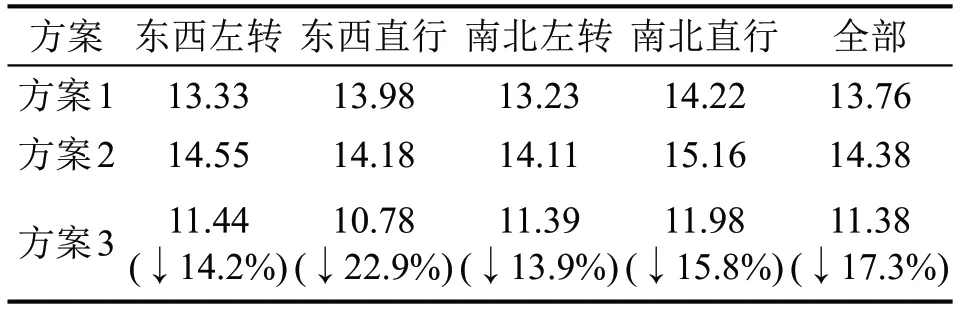
表3 车均延误Table 3 Average delay (s)
从表3 和表4 可以看出,交通条件不变,方案3的车均延误和停车率较方案1分别下降了17.3%和9.2%。原因在于方案3 能根据绿灯时间来动态调整CAVs 的轨迹,可使更多的车辆在绿灯期间驶离交叉口,需要停车等待下一个绿灯的车辆数量减少,因此每相位的平均延误和停车率都有下降,如图5(a)所示。方案3 和方案2 相比,车均延误和停车率分别降低了20.86%和21.59%,这种减少归因于方案3优化了车道分配和CAVs轨迹。CAV专用车道较混合车道的车辆通行效率高,车道组的总饱和流率提高了,在相同的交通需求下,相位所需的绿灯时间缩短。因此,与无车道分配相比,延误和停车率的降低幅度更大,图5(a)和图5(b)表明了这种差异。结果表明,本文提出的优化方法是可行和有效的。
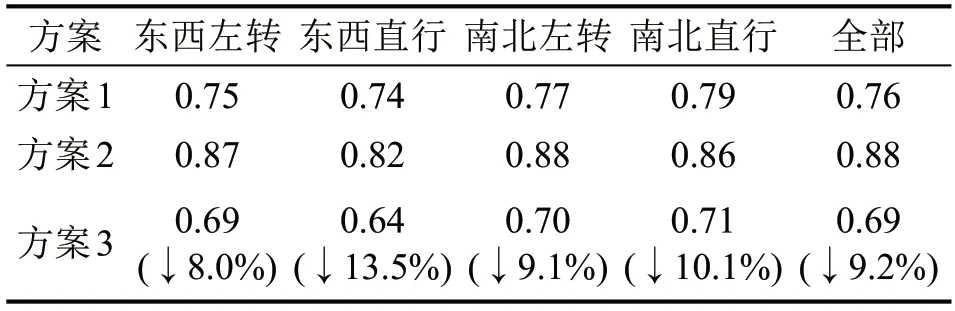
表4 停车率Table 4 Stop rate of vehicles

图5 部分信号周期CAV轨迹的优化结果Fig.5 Trajectory optimization results of part cycles
表5中,第1列的1、2和3分别表示输入交通量是表2中所列交通量的50%、100%和150%。从表5可以看出,当CAV 渗透率为50%时,白色相位优化策略在中低饱和交叉口的性能优于本文提出的方法,而在高饱和交叉口则相反。Niroumand 等[10]提出的优化策略中,白色相位的数量随交通量由低到高逐渐增加。当交通量低时,白色相位中需要规避的冲突车辆少且相位时长短,各个方向的CAVs 可同时释放,减少了其他相位的停车次数和延误,能有效提高交叉口时空资源的利用效率。而当交通量较大时,白色相位出现频次高,增加了一个相位,其他相位车辆等待时间增长;而且冲突车辆增多,需通过频繁的CAVs轨迹控制进行规避,CAVs的延误也随之增大。
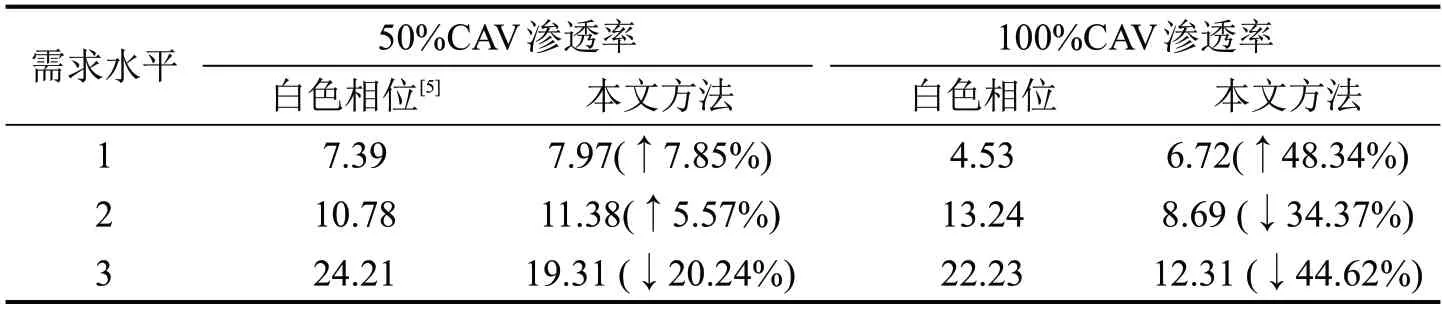
表5 不同CAV渗透率下3种交通负荷下的车均延误Table 5 Average delay for three demand levels with different CAV penetration rates
当CAV 渗透率为100%时,白色相位优化策略与无信号交叉口自动驾驶控制策略相同,但CAVs进入交叉口的时间需要优化。当交通量较低时,CAVs 规避冲突的数量少,因而延误低。随着各个方向交通量的增加,各进口道交通冲突数量快速增加,增大了冲突规避的复杂性,如图6 所示,许多CAVs 需要在路段上减速等待进入交叉口的时间窗,导致延误迅速增加。在白色相位优化策略中,各进口道上的CAVs 以离散形式进入交叉口,而本文中CAVs 以队列的形式进入交叉口,不仅减少了计算规模,也提高了通行效率。因此,本文提出的方法更适合高饱和度、高CAV 渗透率的多车道信号交叉口。

图6 100%CAV渗透率下白色相位的轨迹优化结果Fig.6 Trajectory results of white phase for a 100%CAV penetration rate
4.2 敏感性分析
(1)路段长度对延误的影响
保持信号相位方案、d(d=20 m)、CAV 渗透率和表2中的交通量不变,路段长度从60~300 m连续变化,步长为20 m,仿真结果如图7所示。

图7 路段长度对延误的影响Fig.7 Road segment length on delay
图7 中,随着进口路段长度增长,车均延误在60~160 m范围内快速下降,之后延误在160~280 m范围内下降速度趋缓,最后在280 m 后趋于稳定。当路段长度小于160 m 时,因保留有加速空间d,剩余路段长度空间不够致使排队溢出且CAV轨迹优化困难,导致停车次数快速增加,进而延误居高不下;当路段长度在160~280 m 时,每相位队列划分中可实施CAV 轨迹优化的车辆数逐渐增加,停车次数迅速减少,进而延误逐渐降低;当路段长度大于280 m 时,各相位队列划分中全部CAVs 均能实施轨迹优化,因而延误趋于稳定。由此可见,当路段长度不小于280 m 时,设置加速空间d是有利的。
(2)CAV渗透率对延误的影响
保持信号控制方案、每相位的交通量不变,进口交通流的CAV 渗透率(Pcav)从0~1 连续变化,步长为0.05,仿真结果如图8所示。
当交通量不变时,延误随Pcav的增大而逐渐减小。车道优化分配能提高相位的饱和流率,进而降低流量比,如图9 所示,并使得车均延误下降。选择3 种车道分配方案进行数值仿真,验证Pcav在不同车道分配方案的变化,结果如图10所示。

图9 Pcav 对流率比的影响Fig.9 Pcav on flow ratio

图10 3种车道分配方案下Pcav 对延误的影响Fig.10 Pcav on delay under three-lane allocation schemes
当Pcav<0.33 时,无CAV 专用车道的车道分配方案延误最小;当Pcav分别介于[0.33,0.76]和(0.76,1.00]时,分别在设置1 条和2 条CAV 专用车道时,延误最小;当Pcav>0.33 时,分配CAV 专用车道是有利的。Pcav越高,CAV 专用车道需求数量就越多。
(3)最大车速对延误的影响
在式(19)和式(21)中,最大速度是每相位CAVs队列划分的关键参数,会影响到优化结果。保持相位方案、CAV 渗透率和交通量不变,最大速度从44~64 km·h-1连续变化,步长为2 km·h-1,仿真结果如图11所示。
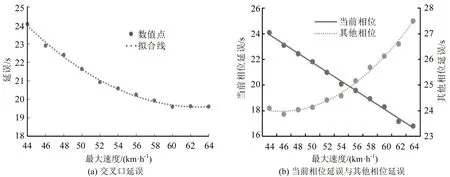
图11 最大速度对延误的影响Fig.11 Maximum speed on delay
由图11(a)可知,最大速度增大会使相位CAV队列划分的范围变大,有更多的车辆可在当前相位通过交叉口,从而延误降低。图11(b)为东西直行相位和其他相位延误随最大速度增大的变化情况。可以看出,随着最大速度增大,本相位延误线性减小,而其他相位延误增长率逐渐增加,当本相位延误减少量不足以抵消其他相位延误增加量时,继续增大最大速度无意义。
5 结论
(1)本文提出一种人机混合驾驶环境下CAV专用车道的动态设置方法,并构建CAV 轨迹与信号控制参数协同优化算法。仿真结果表明,与全感应信号控制方案相比,交叉口车均延误下降了17.3%。同时研究表明,当CAV 渗透率超过0.33时,有必要配置一条或多条CAV 专用车道来分离CAVs 与CHVs 的通行,以提高交叉口的通行效率。与Niroumand等的优化策略相比,本文提出的方法更适合高饱和度、高CAV 渗透率的多车道信号交叉口。
(2) 本文仅解决了CAV 专用道的优化配置问题,尚未涉及CAV专用车道利用效率提升的问题,如左转CAVs 与直行CAVs 共享CAV 专用车道,以及预留空间d引起的燃油消耗问题等。
猜你喜欢
城市轨道交通研究(2022年4期)2022-04-16
广东通信技术(2021年9期)2021-10-12
山东科学(2021年3期)2021-06-10
安庆师范大学学报(自然科学版)(2021年1期)2021-03-14
泰山学院学报(2018年6期)2018-12-18
专用汽车(2018年10期)2018-11-02
城市道桥与防洪(2016年7期)2016-11-18
上饶师范学院学报(2016年3期)2016-08-02
专用车与零部件(2016年6期)2016-03-13
专用汽车(2015年8期)2015-03-01