基于分子力场的网联自主车辆跟驰安全特性及模型
2023-12-28 02:53曲大义孟奕名王韬宋慧陈意成
交通运输系统工程与信息 2023年6期
曲大义,孟奕名,王韬,2,宋慧,陈意成
(1.青岛理工大学,a.机械与汽车工程学院,b.土木工程学院,山东青岛 266520;2.淄博职业学院,人工智能与大数据学院,山东淄博 255314)
0 引言
智能网联交通系统深度融合人车路环境等多维要素,异质车群感知与交互呈现复杂的动态特性;系统描述网联自主车辆内在“自驱动粒子”特性及其运行态势演化规律,是网联自动驾驶安全和车群稳态运行的关键所在。
车辆的人工势场理论最早应用于路径规划[1]。Guldner 等[2]介绍了一种用于跟踪人工势场梯度的滑模控制策略。Petar 等[3]将一个奇异点的势场分析为同源性的最简单情况。Ge 等[4]考虑由人工驾驶车辆和网联车辆组成的异质队列中的各种连接结构,表明将一些具有适当设计的增益和延迟的网联车辆插入车流中,可以提高车流稳定性。Treiber等[5]提出智能驾驶员模型(Intelligent Driver Model,IDM),对微观和宏观交通模型进行了对比和解释。杨龙海等[6]建立分子相互作用势函数及壁面势函数,并构建改进分子动力学的车辆跟驰模型(Modified-Molecular Dynamics,M-MD)。Tian 等[7]提出由速度适应和随机效应之间竞争引起的交通震荡,并发现在车辆跟驰中速度差比间距起着更重要的作用。Lee等[8]用随机过程模拟多车道高速公路上的跟驰行为,并建立了一个多车道随机连续跟驰模型。Makridis等[9]提出一种以驾驶员和车辆特性为输入的跟驰模型。秦严严等[10]建立协同自适应巡航控制(Cooperative Adaptive Cruise Control,CACC)车辆跟驰模型,并分析不同CACC比例下的混合交通流通行能力。车辆跟驰模型对于解析微观车车交互与宏观交通现象之间的关系起到了巨大作用,通常的跟驰模型研究侧重于跟驰车辆与前车的相对速度及距离,而对跟驰场景中动态要素的考虑相对较少。随着自动驾驶等技术的发展,智能网联汽车跟驰行为建模成为研究热点之一。
伴随智能网联交通技术的迅速发展,网联自主车辆的跟驰安全至关重要,同时也应兼顾合理性与高效性。智能网联汽车的跟驰行为具有自主性与动态性。因此,考虑系统相似性,将微观车辆比拟为分子力场中的自驱动粒子,深入分析网联自主车辆的分子力场跟驰特性,基于分子力场势函数构建智能网联汽车的跟驰模型,实现网联自主车辆的安全交互和高效运行。
1 系统相似性分析
从物理学的角度,场表示为物体对在其周围一定空间范围内的其他物体存在相互作用,这种作用的大小随相对位置不同有所区别。分子力场势函数通过将能量表达为原子核坐标的解析形式,粒子间相互作用力与其间距关系如图1所示。
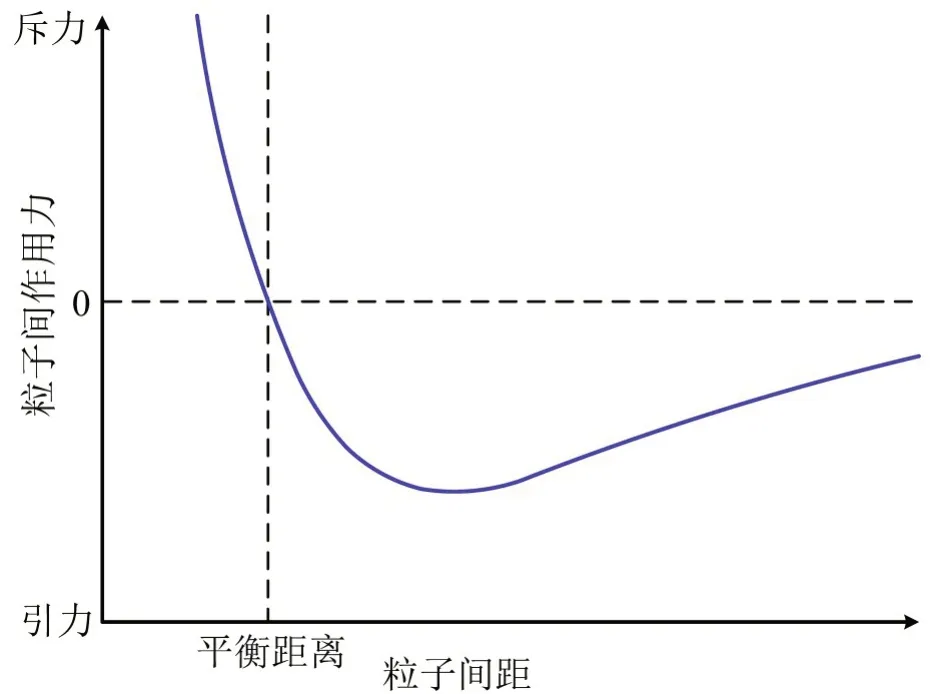
图1 粒子相互作用力与粒子间距关系Fig.1 Relationship between particle interaction force and particle spacing
在复杂交通场景下,如何精准评估车辆周围交通环境情况对于提高道路交通安全性具有重要意义。类比物理学中用场描述物体间的相互作用,车辆间相互作用可表示为车辆坐标的解析形式,道路交通系统中行驶车辆既不过近也不过分远离前车可看作车辆受到周围车辆的作用,即后车在前车作用条件下调整加速度追求跟驰平衡距离。分子力场中,在引力和斥力共同形成的合力作用下,表现为粒子间的相互作用力。通过粒子的实际间距r与平衡距离r0的大小关系可判别粒子间相互作用效果,表现为以下3种状态:r <r0时,粒子间表现为相互排斥;r=r0时,粒子间的相互作用力为0;r >r0时,粒子间表现为相互吸引。在相互作用力的约束下,粒子间距离围绕平衡距离上下波动,即粒子间趋于平衡状态。同理,车辆在行驶时总试图与前车保持动态需求安全距离。当距前车过近时,后车主动增大与前车距离以避免碰撞从而提高安全性,可解释为后车受到前车斥力而远离;当距前车过远时,后车在保证安全性的前提下主动缩小与前车距离以提高车辆通行效率,可解释为后车受到前车引力而靠近。后车通过远离以避免危险或靠近以提高效率,在平衡距离附近安全且高效地完成行驶任务。
2 分子力场理论及模型
2.1 分子力场解析
物体可对一定范围内的其他物体产生影响,其作用效果随着相互位置的不同而改变。场源使得处于势场中的其他物体受到力的作用效果,进而改变其运动状态,如图2所示。

图2 分子相互作用势分布Fig.2 Molecular interaction potential distribution
为研究车车交互的相互作用关系,交通学者基于势场理论建立了车车交互的定量化模型。曲大义等[11]对车车交互耦合作用的分子动力学特性进行了研究,建立了分子动力学车辆跟驰模型,并通过仿真验证了模型的有效性和精确度;李林恒等[12]建立了基于安全势场理论下的车辆跟驰模型。通常运用势场理论分析跟驰行为假设车辆类型是一致的,而分析网联异质车流跟驰行为的学术成果相对较少。此外,在势场理论的应用方面,分子力场势函数结构清晰合理,模拟贴合实际,因而应用效果好。
学者们通过构建数学模型来描述微观物理粒子之间的相互作用关系,两个微观粒子是彼此受到相互作用力的场源。与一些将引力项和斥力项分别独立表达的势场模型相比,分子力场相互作用势函数将两者统一,将粒子间相互作用视作排斥作用项及吸引作用项的组合,且引力作用与斥力作用皆与粒子间距的多次幂的倒数有关,则分子力场相互作用势函数为
式中:r为两粒子之间的距离;α、β分别为斥力作用项与引力作用项的幂次;A、B为势函数关于r的中间变量。在分子力场相互作用势场中,两个粒子互为受到相互作用力的场源。粒子处于势阱中心时,分子力场势函数对r的一阶导数值为0,即
式中:φ(r)为势能;ε为分子力场的势阱深度;re为处于势阱中心时的粒子间距。将式(1)代入式(3),可得
分子力场势函数可表示为
粒子受力可用势能微分求解,并得出粒子受力表达式为
使用式(6)计算并绘制分子力场势函数粒子间相互作用力与间距关系曲线,通过分子力场势函数描述粒子间相互作用关系,如图3所示。
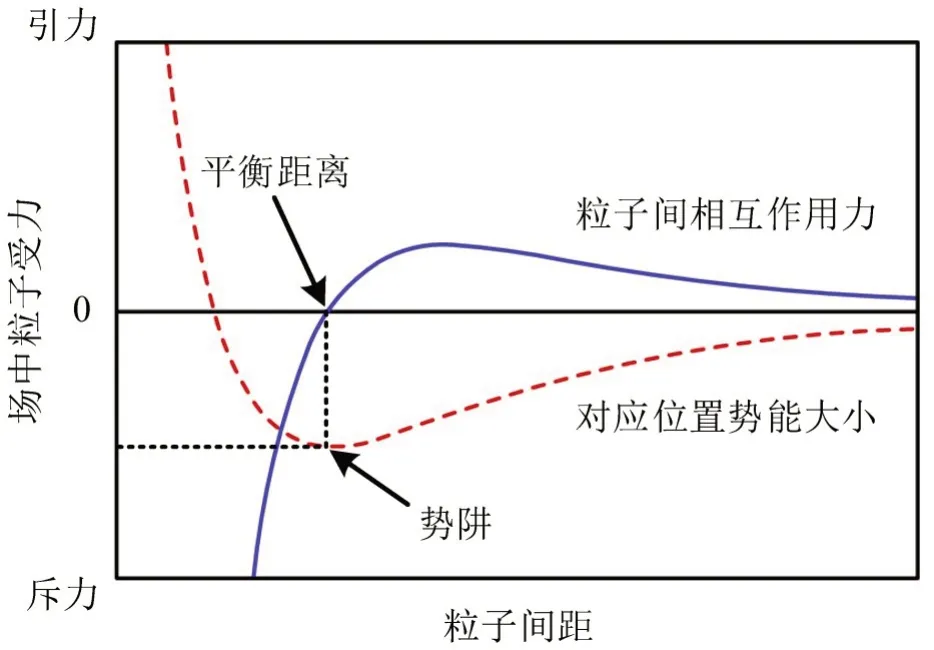
图3 分子力场势函数相互作用力Fig.3 Interaction force of molecular force field potential function
其中,粒子间的平衡距离为场源与势阱位置的距离。分子力场中粒子受力情况与图1 的实际情况吻合,证明分子力场势函数对粒子间相互作用具有较好的模拟效果。
2.2 分子力场车辆跟驰安全特性
随着车路协同技术推动智能网联汽车(Connected Automated Vehicle,CAV)自主决策能力的提升,每辆车都作为影响车辆行驶的分子力场源。基于驾驶行为源自于风险场的假设,采用势函数建立交互模型可广泛应用于车车交互,如图4所示。
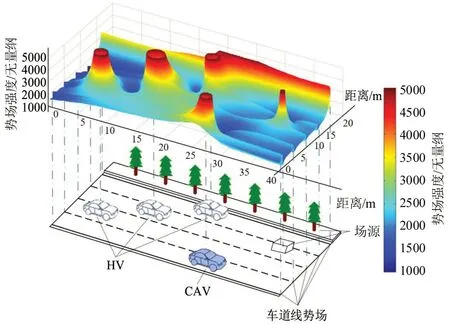
图4 驾驶行为风险场假设Fig.4 Hypothesis of driving behavior risk field
CAV在低风险处行驶,利用势函数对其所在风险场情况进行分析,如图5所示。
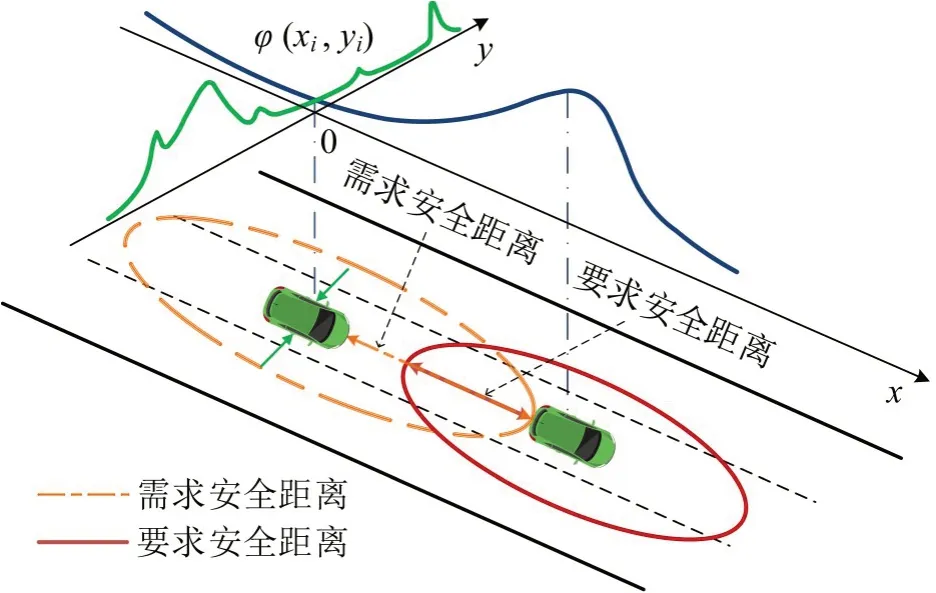
图5 风险场势函数表示Fig.5 Risk field potential function representation
道路上行驶车辆间的相互作用关系与分子力场存在相似性,运动中个体的相对变化可能会引起其他个体的相应变化,这种动态关联性变化是一种交互行为,可视为一种耦合关系。行驶着的车辆间保持既不过近也不过分远的耦合关系,类似于分子力场粒子间的相互作用关系。后车在前车的要求安全距离后沿,前车在后车的需求安全距离前沿,即车辆在行驶时总试图与前车保持动态需求安全距离。车车交互行为的安全动态特性与分子力场中粒子间的力学关系存在异曲同工之妙,分子力场可反映交通因素对车辆间相互作用,从分子力场势函数的角度解析自动驾驶汽车的安全特性,探究微观道路交通系统中智能网联汽车的分子力场跟驰特性,从而保障交通流的安全、高效运行。
2.3 车辆跟驰的分子力场模型
2.3.1 HV跟驰模型
根据动力学特性,车辆在紧急制动过程中产生的位移xn为
式中:vn为后车初速度;an为后车制动时最大加速度。在实际的道路交通场景下,后车减速起初的一段时间里仍保持初始速度行驶,称为人工驾驶车辆(Human-driven Vehicle,HV)的响应延迟τHV(一般取0.7 s),则后车实际位移距离xn为
当前车突然以最大加速度制动,后车驾驶员发现前车制动到后车完成制动过程中,后车与前车产生的位移差Δxretardation为
式中:vn-1为前车初速度;an-1为前车制动时最大加速度。假设所有车辆的紧急制动能力相同且初速度一致(即an-1=an=a1且vn-1=vn=v0),制动过程中前后车位移差ΔxHV为
理想条件下,后车与前车保持ΔxHV距离行驶,紧急制动时恰好不与前车发生碰撞。但实际交通场景下,难以避免出现意外情况,如车辆或行人突然从视野盲区闯入等。因此,跟驰安全距离应适当增加停车安全距离s0-HV(一般取值为2 m),则跟驰安全距离sn-HV为
根据分子力场势函数,类比建立分子力场势函数跟驰模型为
式中:l为前后车实际距离,与粒子间的实际距离r对应。后车受前车作用力所产生的加速度an-HV(l)为
式中:m为后车质量。为简化模型,令λ=,假设所有车辆质量均相同,则λ仅与ε线性相关,则受到前车作用的纵向加速度模型表示为
后车驾驶员会根据前后车速度关系,动态调整跟驰目标距离,因此引入速度协同项ak-HV,即
式中:μ为速度协同项待定系数。构建引入速度协同项的分子力场HV纵向加速度模型,即
式中:aHV为HV纵向加速度。
2.3.2 CAV跟驰模型
CAV由于搭载网联通信技术,前后车相对位置及速度等运行状态信息为CAV 实时交互提供基础。将采集的车辆运行状态信息实时传递给CAV,提升网联异质车流运行的安全性及高效性,信息获取如图6所示,图中,Ci表示被采集运行状态的第i辆车辆。
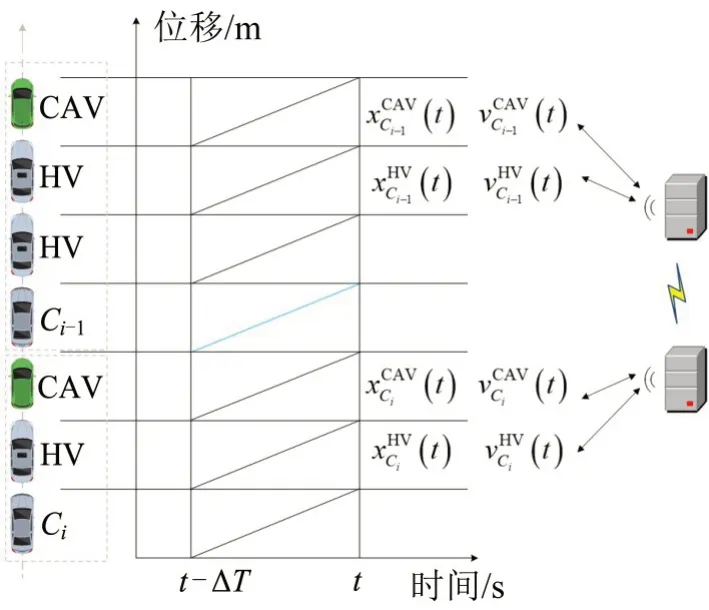
图6 网联异质车辆信息获取Fig.6 Information acquisition of network connected heterogeneous vehicle flow
仅对与HV 组成网联异质车流的CAV 进行研究,通过调整CAV加速度阻断波动传递,避免该车前方不稳定状态向后延展,实现网联异质车群的整体稳定运行,如图7所示。
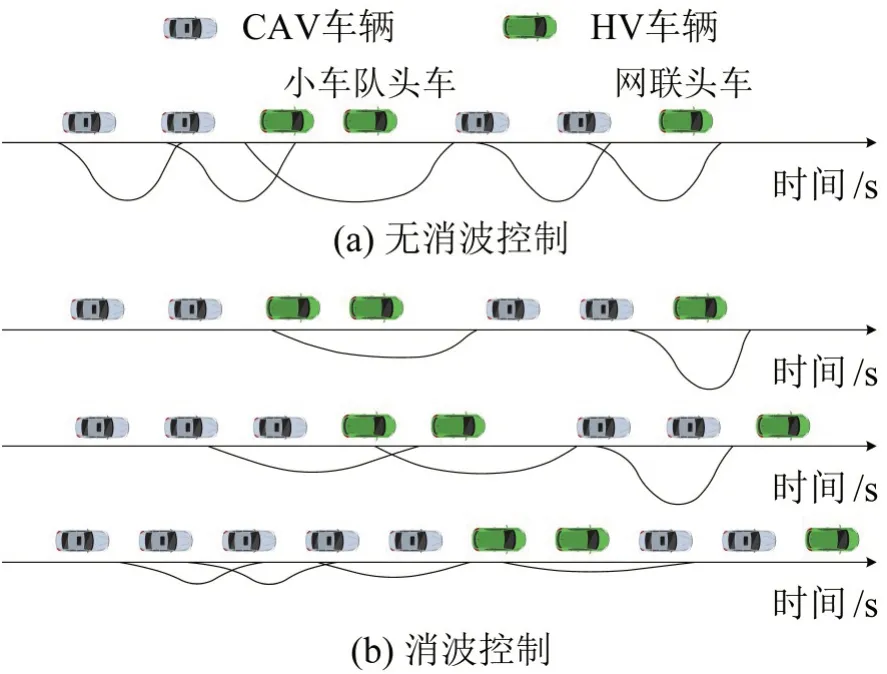
图7 网联异质车群的车辆跟驰状态变化Fig.7 Changes in vehicle following status for network connected heterogeneous vehicle flow
受前车影响而制动的过程中,CAV为避免碰撞的最短制动距离为
式中:τCAV为CAV 响应延迟。适当增加停车距离s0-CAV,CAV跟驰安全距离为
规定跟驰安全距离系数δ,取值范围为(0,1],则式(18)可简化为
基于分子力场的CAV 跟驰模型纵向加速度函数表示为
3 模型参数标定
人工蜂群算法(Artificial Bee Colony Algorithm,ABC)是基于模仿蜜蜂行为而提出的一种优化方法,作为基于群智能的全局优化算法,有着较快的收敛速度,故本文采用人工蜂群算法进行标定,ABC算法流程如图8所示。对德国高速公路High_D数据集进行筛选的相关规则如下:
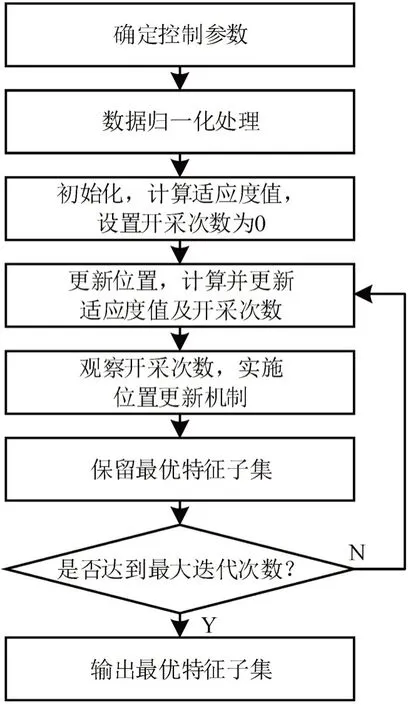
图8 ABC算法流程Fig.8 Flow chart of Artificial Bee Colony Algorithm
(1) 纵向间距l<150 m,避免车辆处于自由流状态;
(2)持续时间t>20 s,保证单个跟驰片段持续20 s以上。
基于上述规则提取2100 个跟驰数据段,经人工校对提取2060个。其中,随机抽取1560个和500个数据段作为标定集和验证集。
设置迭代次数为350次,分子力场跟驰模型中参数的标定结果如表1所示。
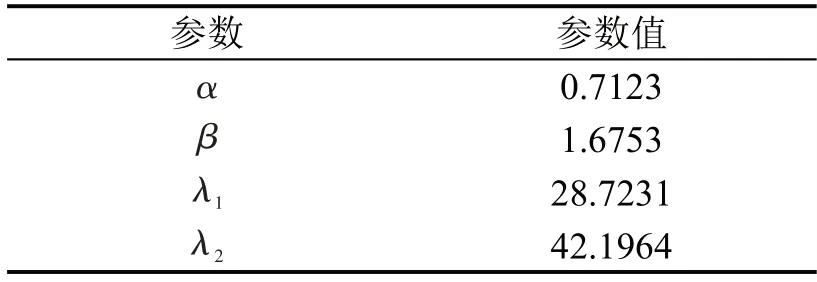
表1 参数标定结果Table 1 Parameters calibration results
由于对CAV 交通流进行实测的条件及数据不足,对比分析传统交通流与CAV交通流的差异,基于HV跟驰行为实测数据,对基于分子力场的CAV跟驰模型进行参数标定。使用3组车辆加速度a、安全距离sCAV、实际跟驰间距l进行求解,即
我国高速公路限制速度为33.3 m·s-1(即120 km·h-1),拥堵状态临界速度为21.67 m·s-1(即78 km·h-1)[13],后者用作参数标定基准速度。CAV响应时间通常小于0.2 s[14],CAV制动时的最大加速度取8 m·s-2,车长5 m。自由流速度(即33.3 m·s-1)的稳定交通流中,CACC 车辆的跟驰距离为26.98 m,CACC 跟驰模型中跟驰安全距离系数δCACC=0.2643;速度为21.67 m·s-1时,CACC 跟驰模型的安全跟车距离为14.09 m[15]。将3 组数值带入式(22),可得α1、β1、μ1的值分别为2.241、0.573、183.912。
4 模型稳定性分析及效果评价
为客观评价本文建立的分子力场跟驰模型的效果,选择M-MD模型与IDM模型进行对比。
M-MD模型公式为
式中:aM-MD为后车加速度;ω1、ω2为待定参数。
根据同样数据集,按照文献[6]使用的方法对M-MD模型进行参数标定,结果如表2所示。
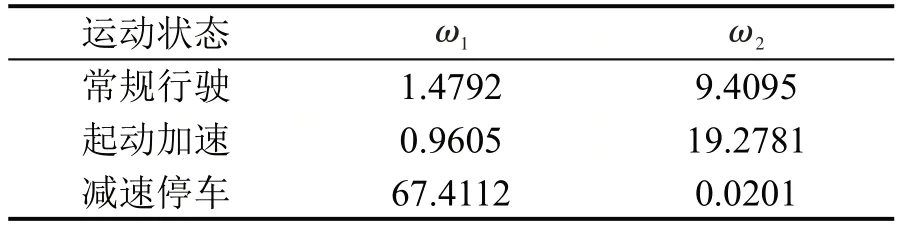
表2 M-MD模型参数标定结果Table 2 Calibration results of M-MD model parameters
IDM模型公式为
式中:aIDM为后车加速度;vd为期望车速;td为跟驰安全时距;amax为制动最大加速度;ac为制动舒适加速度。采用相同数据集对IDM 模型的参数进行标定,结果如表3所示。
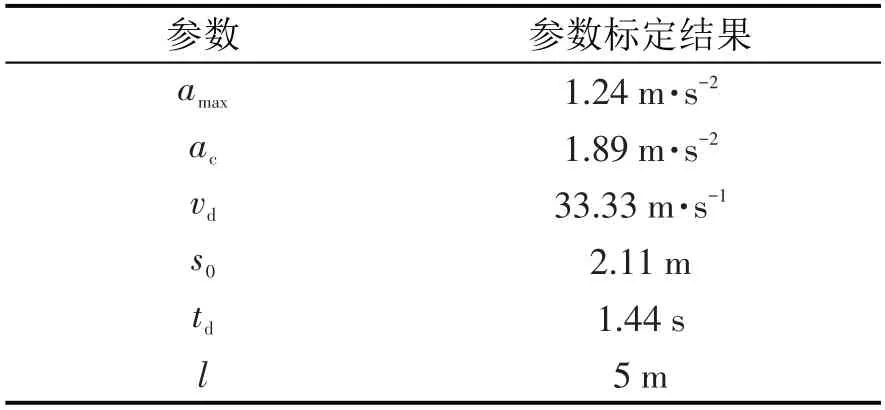
表3 IDM模型参数标定结果Table 3 Calibration results of IDM model parameters
使用MATLAB 搭建仿真场景模型车辆运行,前车设置实测位置、速度、加速度数据,模型仿真后车设置初速度,仿真控制步长0.1 s。根据仿真实验结果,绘制实测数据及模型仿真后车时间-加速度曲线进行对比,如图9所示。
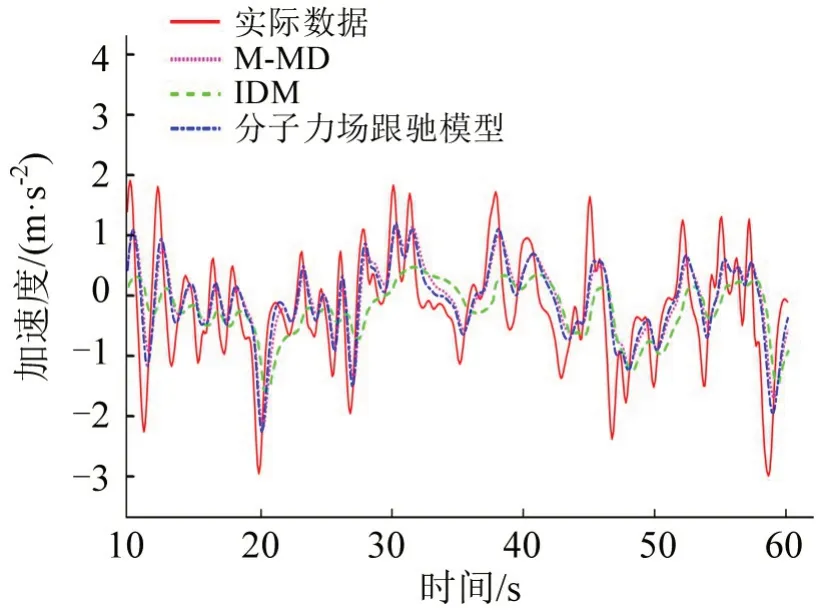
图9 实测数据与仿真实验结果(时间-加速度)Fig.9 Simulation results(time-acceleration)
由实验结果可知,M-MD模型与分子力场跟驰模型能更好捕捉前车的运动状态变化,产生与真实车辆相似的跟驰响应;IDM 模型的加速度-时间曲线相对平滑,响应差异较大,反映了自动驾驶车辆加速度波动小、行驶平稳的特点。
为更直观对比模型与实际交通场景的拟合度,使用平均值绝对误差EMAE(Mean Absolute Error,MAE)和均方根误差ERMSE(Root Mean Squared Error,RMSE)计算模型误差,计算公式为
式中:N为样本数据总量;yi为真实值;为理论值。两者能较为客观地反映模型误差尺度,误差越小,拟合度越高。运用样本容量为2060 的数据对模型输出值进行误差评价,结果如表4所示。
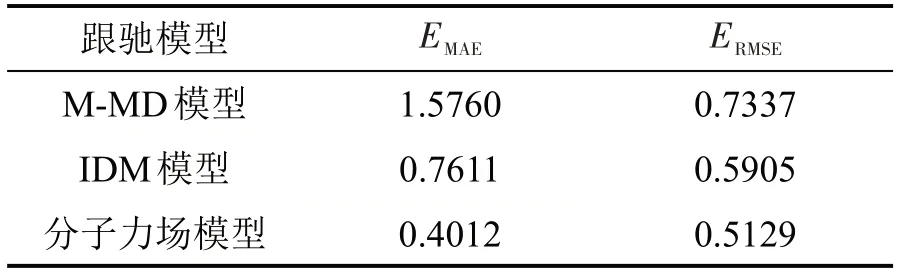
表4 模型拟合误差Table 4 Model fitting error
根据误差评价结果进行分析:模型拟合度方面,分子力场模型优于IDM 模型,IDM模型优于M-MD模型,即分子力场跟驰模型可更好地模拟道路交通场景中车辆跟驰交互行为。
设计仿真实验,施加扰动观测并记录交通流的演化过程。将40 辆车组成的稳态交通流以21.67 m·s-1的初速度行驶,施加的扰动使交通流失稳,观察CAV 运动状态变化情况。仿真步长设置为0.01 s,仿真时长设置为120 s,结果如图10所示。

图10 模型交通流稳定性仿真实验结果Fig.10 Experimental results of model traffic flow stability simulation
队列中的CAV 受到扰动后,速度波动会向后传递且波动程度逐渐降低,与实际场景相符。数值仿真结果显示:两种模型CAV交通流受到扰动后,均能在较短时间内恢复稳定行驶状态,表明两种模型均具有局部稳定性;两种模型CAV交通流在30 s左右队列速度都趋于平稳且车速波动幅度逐渐减小,表明两种模型都具有较好的渐进稳定性;相比于IDM 跟驰模型,分子力场跟驰模型下的CAV 交通流能以较短的时间恢复之前的行驶状态,且车速整体波动性较低,交通流更稳定高效运行。仿真模拟的车辆跟驰场景与实际交通流环境下的跟驰行为基本贴切,根据车辆之间速度与距离提出的稳态控制策略基本符合实际的交通环境,大大减少了驾驶人由于信息感知和处理不及时所造成的车速波动,对于提高驾驶安全性有重要作用。
5 结论
本文以复杂交通场景中的网联自主车辆为研究对象,得到的主要结论如下:
(1)类比人车路环境多维要素约束的网联自主车辆为自驱动粒子,基于分子力场关系分析车辆跟驰行为及安全特性,将动态跟驰行为简化为后车动态寻求需求安全距离的过程。运用分子力场势函数关系,合理规避前期建立的分子跟驰动力学模型所存在问题,平滑排斥作用项及吸引作用项之间的过渡,并引入速度协同项,所建立的车辆跟驰分子力场关系模型具有更好的安全性和稳定性。
(2)对比分析M-MD 模型和IDM 模型,分子力场模型的车辆加速度结果与实际数据的EMAE与ERMSE更低;前车速度发生振荡时,车流整体波动幅度更低。通过与其他模型测试结果对比,分子力场跟驰行为模型具有良好的感知精度及稳定性表现,可有效反映车辆跟随行驶的真实状况。
基于分子力场的车辆跟驰理论可为实现大规模CACC运行提供模型及理论参考,今后的研究将瞄准多维多态的车辆交互行为建模,进一步将分子力场跟驰行为模型扩展到多要素约束的网联异质车群复杂场景,实现网联异质车流的群智协同与安全管控。
猜你喜欢
测试技术学报(2023年2期)2023-04-06
小学生学习指导(小军迷联盟)(2023年3期)2023-03-27
中国音乐学(2022年1期)2022-05-05
数学理论与应用(2022年1期)2022-04-15
原子能科学技术(2021年1期)2021-01-21
图学学报(2019年1期)2019-03-02
物理学报(2018年10期)2018-06-14
数学杂志(2017年2期)2017-04-12
人民交通(2016年9期)2016-06-01
中学生数理化·高一版(2008年6期)2008-11-15