交通事件下路段通行能力多层模糊估计方法
2023-12-28 02:53王嘉文孙晨晨赵靖杭佳宇
交通运输系统工程与信息 2023年6期
王嘉文,孙晨晨,赵靖*,杭佳宇
(1.上海理工大学,a.管理学院,b.智慧应急管理学院,上海 200093;2.常州大学,机械与轨道交通学院,江苏常州 213000)
0 引言
路段通行能力是路段服务水平评估的重要参数,在交通规划、设计与管理等多个重要任务中起着关键的作用。根据《公路通行能力手册》(Highway Capacity Manual,HCM)第7版,路段通行能力定义为“在现行道路、环境、交通和控制条件下,在给定的时间段内,合理预期人员或车辆通过道路的统一路段的最大可持续小时流率”[1]。该定义意味着通行能力受许多可变因素影响,如天气条件、道路条件或驾驶员特征等。因此,在交通流不稳定,受到外部扰动的动态影响条件下,实时估计通行能力是极具挑战性的任务,而交通事件即是最典型的此类场景。在城市道路交通系统中,交通事件是指“影响(或可能影响)道路通行能力,阻碍交通流顺畅运行并导致道路使用者额外延误的事件”[2],其中,交通事故、车辆停滞、道路施工、货物倾覆为主要的交通事件类型[3]。各类交通事件的频发会造成交通拥堵,严重影响城市交通系统的运行效率。据统计,高密度城市道路网络中超过50%的交通拥堵是由交通事件导致的,交通事件是造成通行能力降低的主要原因[4]。因此,交通事件下的路段通行能力是研究交通事件导致交通拥堵发生、消解规律的基础问题,实时、准确地估计路段通行能力,可为动态化、智能化的交通管理与控制策略提供关键输入,同时,对研究交通事件相关交通流运行规律起到重要作用。
当下,交通事件下的通行能力难以估计,这主要有以下原因:①交通事件的多样性,交通事件种类繁多,包括交通事故、施工、车辆故障、自然灾害等,各类事件对通行能力的影响特征难以量化;②交通事件影响因素复杂,不同类型交通事件对通行能力的影响强度,与交通事件物理距离、交通事件范围等多种因素相关,呈现出较为复杂的非线性关系;③事件下交通参与者行为难以量化,交通参与者的行为会影响通行能力(如经过交通事件区域时减速旁观等行为),但难以预测和量化此类行为的影响。因此,在交通事件下估计路段通行能力具有困难性,研究交通事件下的通行能力估计方法具有较强应用价值。
关于交通事件对道路通行能力的影响,国内外学者已展开一定研究。Aidin等[5]基于HCM的建议和校准后的微观模拟模型,调查了事件下通行能力下降与路段间的相互作用对通行能力的影响。Almotahari等[6]利用事故和交通流量统计数据集研究了事件导致通行能力减少的随机性,并讨论了通行能力的降低对延误估计的影响。何雅琴等[7]基于水波学原理,利用交通影响系数概念,融合分位速度对交通事件下的通行能力等级进行了划分。郑宣传等[8]采用改进的K-means聚类方法对城市轨道交通突发事件进行了量化分级,并从事件类型、持续时间、影响程度等方面分析了各种类型事件的特征规律。上述研究多采用定量的确定性参数分析交通事件影响。然而,交通事件影响因素较多,各影响因素具有复杂关联,具体的影响难以量化,具有模糊性和复杂性,且难以定量分析[9-10]。此外,事件影响下的驾驶行为、道路条件等参数难以量化,历史数据亦难以满足统计学建模需求,导致事件下路段通行能力实时估计难以实现,研究较少。引入多层模糊方法是解决这一问题的可行思路。
运用模糊估计系统研究通行能力估计方法时,需引入交通事件因素作为输入条件。针对这些因素的模糊性、不确定性特征,目前主要有贝叶斯统计、灰色系统理论、模糊逻辑等研究方法。其中,模糊逻辑是一种基于模糊数学的逻辑系统,于1965年由Zadeh提出[11]。相比于贝叶斯统计和灰色系统理论,模糊逻辑方法可以更有效地处理难以用精确数值描述的模糊信息,且其灵活性较强,可以根据实际问题进行调整和优化。除此之外,基于该方法的数学模型具有较强的鲁棒性,易于设计和实现,因此适用于解决交通问题,如交通分配、事故分析、事件预防、道路交叉口控制和交通信号控制等。如:刘佳佳等[12]基于模糊逻辑和遗传算法,建立了交叉口信号灯的模糊控制及优化方法,有效减少了车辆的平均延误时间;仝秋红等[13]针对自动驾驶车辆行驶状态评判不确定性特点,建立了一种新的模糊评判方法来确定智能车辆的行驶状态。Shirvani等[11]使用模糊逻辑控制器确定了各阶段的实时绿灯时间,解决了交叉口动态不确定性问题。Toan等[14]设计了一个多级模糊控制器,通过预测交通状况,实现了对事故下的高速公路的交通控制。由此可见,引入模糊逻辑方法是应对交通事件对驾驶行为影响主观性、模糊性和不确定性问题,实现交通事件下路段通行能力实时估计的可行路径。
因此,本文采用模糊逻辑方法来解决交通事件下通行能力难以实时估计的问题。首先,基于驾驶模拟、微观仿真与历史数据,本文分析了各类交通事件影响通行能力的因素,将多样的事件影响归纳为交通事件物理范围、道路条件变化、驾驶员行为变化、事件车道与目标车道距离这4 项主要因素并作为模型输入,使多层模糊估计方法适用于多种事件类型。进而,从事件导致通行能力下降的源头——交通事件对通行能力的直接影响及间接影响出发,构建3 个模糊判别层,将复杂问题转化为多层模糊问题。最后,研究引入模糊逻辑方法,将事件车道车速降低率、相邻车道车速降低率等可量化指标与道路条件变化、驾驶行为变化等模糊量关联起来,通过模糊规则推理实现通行能力估计。
综上,本文提出交通事件城市路段通行能力多层模糊估计方法,将交通事件对驾驶员行为的影响、事件下道路条件的变化、交通事件物理范围等因素纳入模糊估计系统,并结合驾驶模拟、微观仿真、历史数据,构建并标定了通行能力多层模糊估计模型,以实现路段通行能力的实时估计,并在典型场景中验证了模型有效性。本文具有重要理论意义与实践价值。在理论意义方面,本文引入模糊数学理论应对交通事件影响的模糊性和复杂性,将交通事件下的驾驶行为、道路条件等影响因素纳入输入集,实现了交通事件下道路通行能力的实时估计,研究成果拓展了通行能力估计理论与方法在非常态交通条件下的应用。在实践价值方面,交通事件下的道路通行能力是非常态交通流组织优化、动态控制优化、交通网络韧性分析等重要应用的基础数据输入,交通事件下道路通行能力的准确估计对解决非常态交通管理问题具有重要实际意义。
1 问题描述
交通事件发生后,根据事件类型不同,事件对所在车道通行能力有直接影响,对邻近车道通行能力有间接影响。根据前文对交通事件的定义和数据调查,本文以交通事故、车辆停滞、道路施工、货物倾覆这4 类交通事件为研究对象。本文要解决的问题是:如何在仅具备交通事件特征作为输入的条件下,实时估计事件对路段通行能力的影响。
如图1 所示,记交通事件发生路段为单向,通行方向共有车道n条,根据交通事件特征输入,将车道标记为事件车道L0和目标车道L1~LN,编号由事件车道L0向两侧对称标记。其中,N为目标车道距事件车道的横向间隔车道数,L1为相邻车道,事件直接影响长度和宽度记作lr和wr,事件对车道的影响强度表现为车速降低率,记作p。交通事件下路段各参与要素已在图中标注。
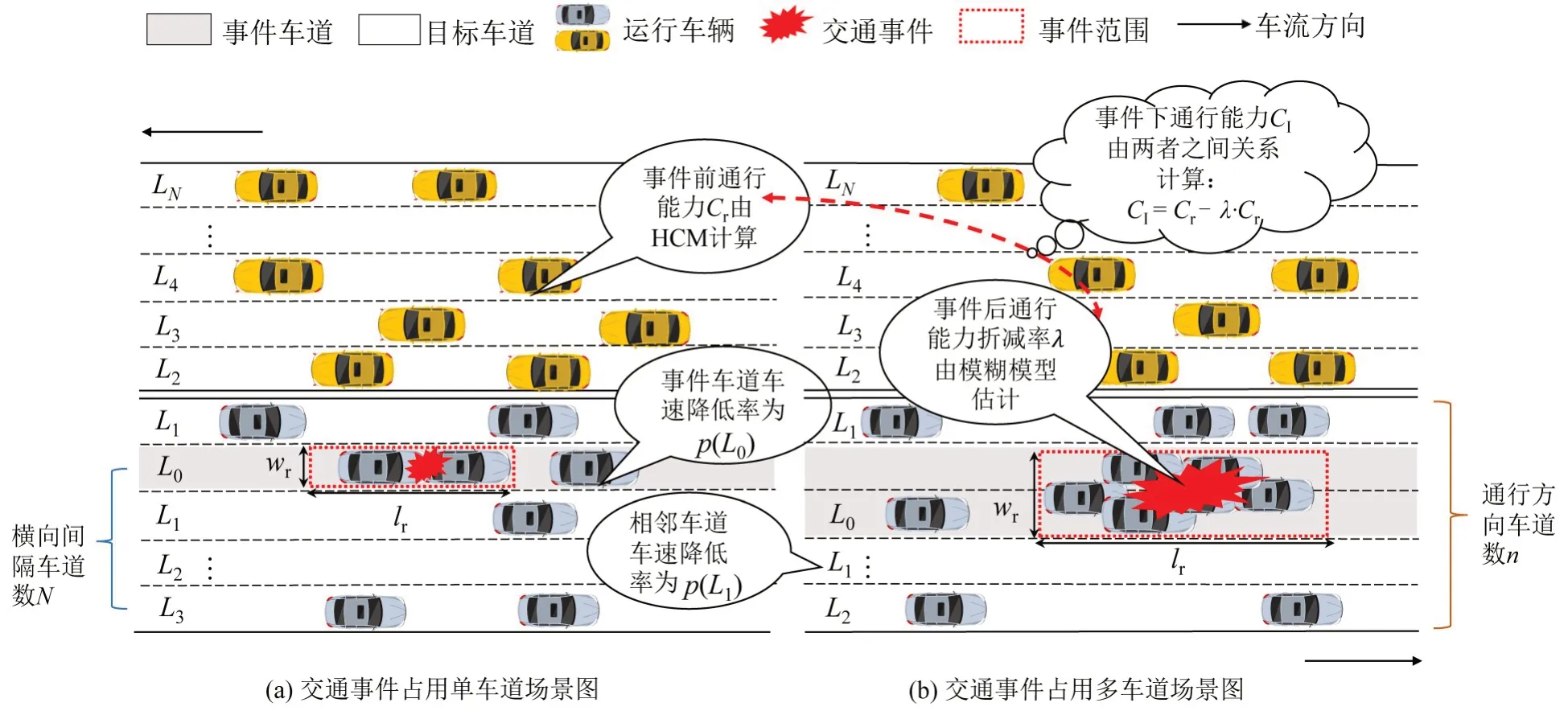
图1 交通事件下通行能力估计示意Fig.1 Illustration of capacity estimation method under traffic incidents
研究对象为道路路段,且不考虑交叉口、进出口、车辆类型及比例对路段通行能力的影响。
2 参数定义
本文使用主要参数的定义和说明如表1所示。
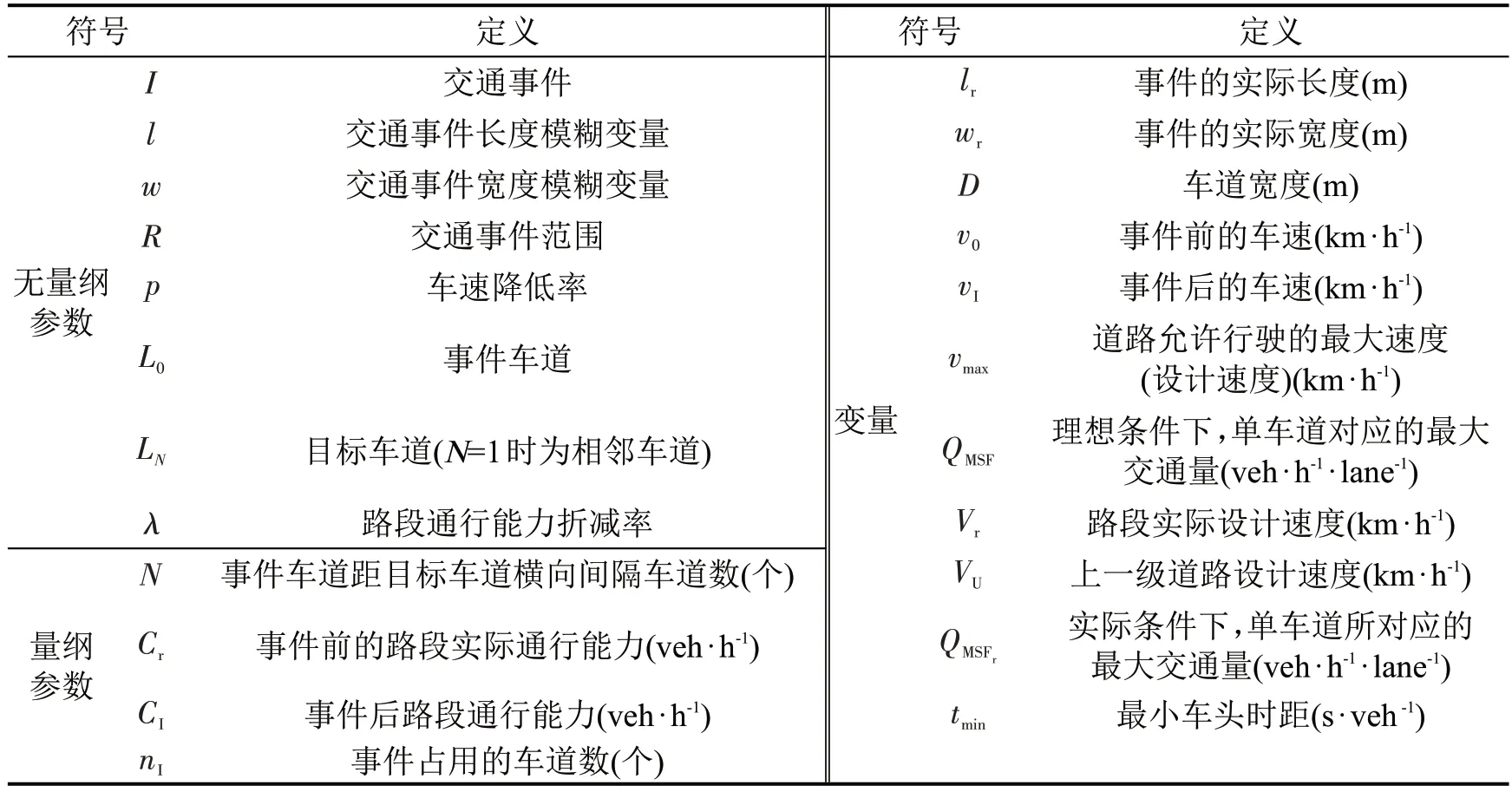
表1 参数说明Table 1 Parameter definitions
3 交通事件下路段通行能力估计多层模糊模型
3.1 多层模糊模型框架
从交通事件对通行能力的直接影响(如事件所在车道通行能力下降)以及间接影响(如相邻车道由于驾驶行为受事件影响导致通行能力下降)出发,对4项主要因素进行模糊判别,分别构建以影响因素为输入,各因素影响程度为输出的模糊子系统,并形成交通事件物理范围、事件影响强度、通行能力折减率这3 个模糊判别层,实现多种复杂、模糊因素的量化表达。根据相互耦合、因果互联关系组合模糊子系统,构成交通事件下路段通行能力估计的多层模糊模型框架,从而实现路段通行能力估计。本模型是多输入单输出(Multiple Input Single Output,MISO)模型,可输出路段通行能力折减率。模型分为3个层次:
(1)交通事件范围模糊判别层
输入交通事件的长度和宽度,模糊判别交通事件范围。
(2)事件影响强度模糊判别层
输入交通事件范围、事件车道影响程度和驾驶员行为影响程度,估计事件影响强度(包含事件直接影响与间接影响)。
(3)通行能力折减率模糊判别层
输入事件直接影响与间接影响模糊判别值,输出事件车道与各目标车道通行能力折减率。
上述多层模糊模型结构如图2所示。
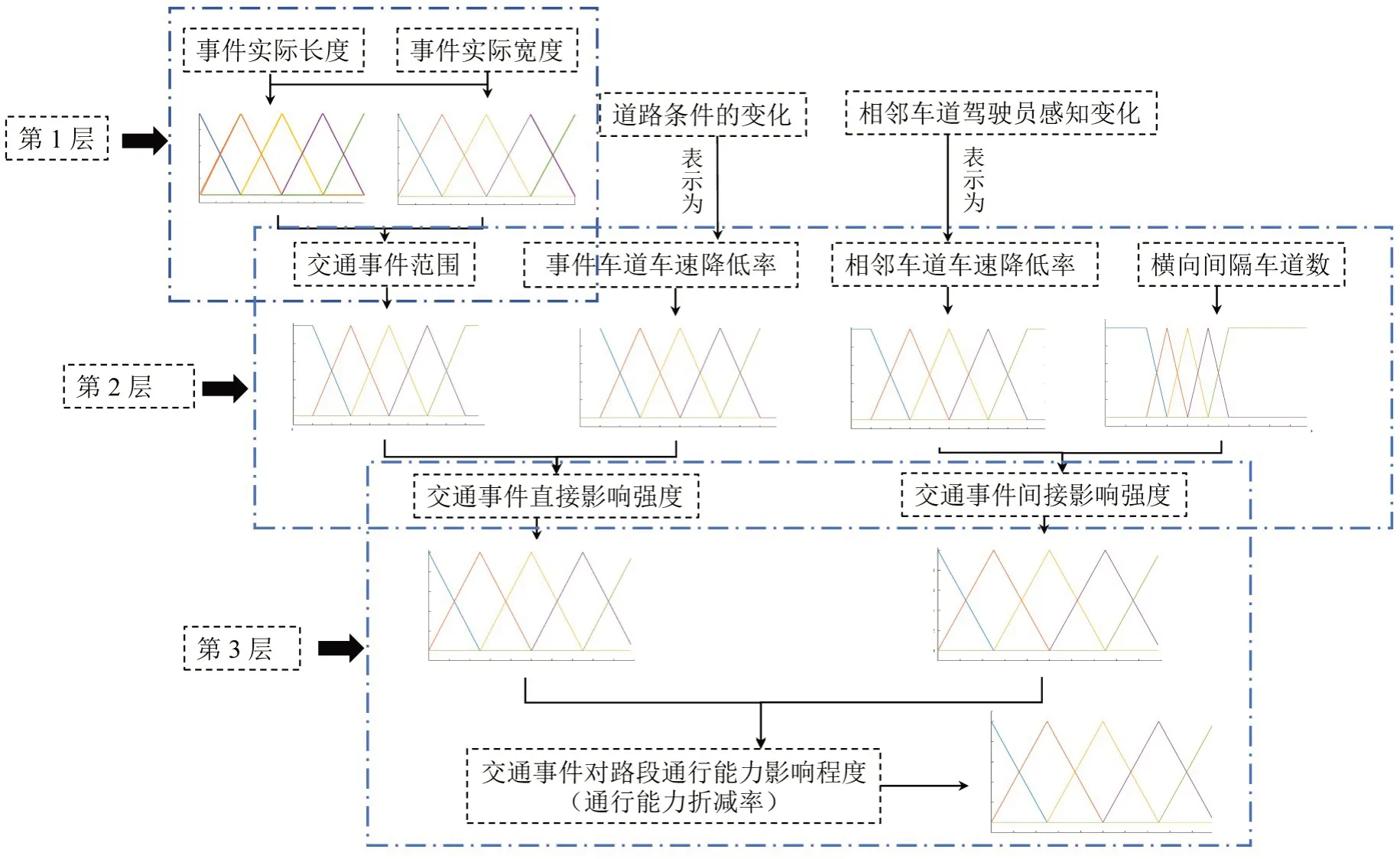
图2 交通事件下路段通行能力多层模糊估计模型结构图Fig.2 Multilayer fuzzy estimation model structure diagram for road capacity under traffic incidents
基于专家知识与当地工程实践经验,各模糊子系统中的隶属度函数与模糊推理规则可提前标定。本文基于交通领域道路通行能力研究方向的5位专家打分意见,专家基于他们在交通领域的专业知识和经验,评估了不同交通情境下的输入变量与输出变量之间的关系,并结合若干历史交通事故数据和实际交通事件案例,共同讨论、分析不同情境下道路通行能力与相关因素之间的关系,统一意见后最终构建默认的隶属度函数及模糊推理规则。规则在工程实践中可根据现场条件进行调整。3.2节将详细阐述各模糊子系统的构建过程。
3.2 交通事件范围模糊判别子系统
交通事件范围是指交通事件占据车道的物理范围大小,包括长度和宽度两个输入变量。交通事件长度越长、宽度越大,造成的事件范围越大,则对路段通行能力影响越大。该子系统的输出为交通事件范围。长度和宽度模糊变量的描述如下。
(1)事件长度模糊变量
事件长度模糊变量为规范事件实际长度的论域值,计算公式为
交通事件的实际长度多为1000 m 以内,且在大于1000 m 后,对通行能力影响不明显[15]。因此,本文设定最大交通事件长度的界限为1000 m。式(1)将交通事件实际长度lr归一化为论域为[0,1]事件长度模糊变量l,当事件实际长度取值大于1000 m 时,事件长度模糊变量l取值为1。将事件长度语言变量定义为{很小,小,中,大,很大},相应的模糊子集为{VS,S,M,B,VB}。
(2)事件宽度模糊变量
事件宽度模糊变量为规范事件实际宽度的论域,事件宽度模糊变量用事件占用车道宽度比例来表示,即交通事件的实际宽度与车道宽度之比。其中,事件的实际宽度包括事件在路面的投影宽度及其造成车辆及货品抛洒物碎片的分布宽度。因此,事件宽度模糊变量公式为
交通事件宽度语言变量定义为{很小,小,中,大,很大},相应的模糊子集为{VS,S,M,B,VB},归一化后,事件的论域为[0,1]。
交通事件长度和宽度的隶属函数均为三角形分布,如图3所示。

图3 交通事件长度和宽度隶属函数图Fig.3 Membership function diagram of traffic incident length and width
根据输入和输出函数的隶属函数以及规则库,制定交通事件范围模糊控制规则,如表2所示。
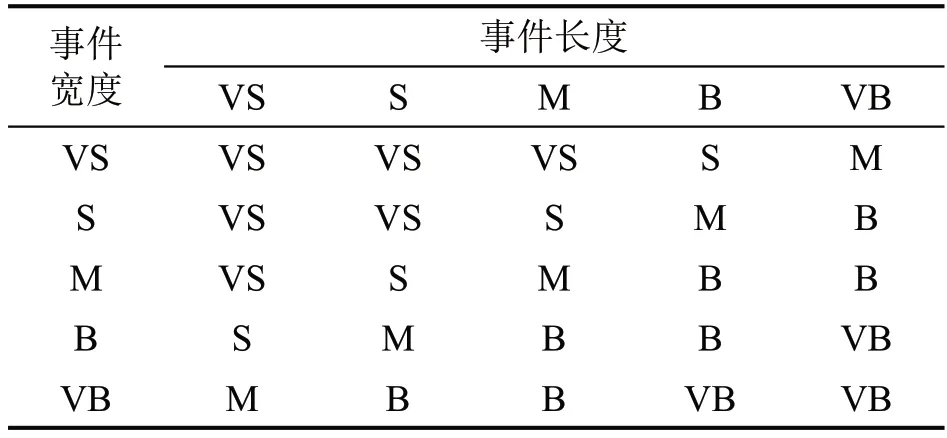
表2 交通事件范围判别的模糊规则Table 2 Fuzzy rules of traffic event range
交通事件范围的基本论域为[0,1],其隶属度函数为三角形分布。采用重心法对模糊集合进行去模糊化计算,可得到事件范围的值。
3.3 交通事件直接影响强度模糊判别子系统
根据交通事件范围和事件车道车速降低率估计交通事件直接影响强度。交通事件范围由交通事件范围模糊判别子系统输出得到。事件车道减速率与事件的直接影响强度正相关,当事件导致车道无法通行时,车速降低率取1;当有左右两条相邻车道时,车速降低率取两条车道上的平均值。事件车道车速降低率越高,交通事件的范围越大时,交通事件直接影响越严重。
(1)交通事件范围
该输入参数为上一层模糊系统的输出,其论域为[0,1]。将交通事件范围语言变量定义为{很小,小,中,大,很大},相应的模糊子集为{VS,S,M,B,VB}。
(2)事件车道车速降低率
为规范事件车道减速率的论域,定义事件车道上车辆穿过事件区域的速度降低率的计算公式为
本文针对各类常见交通事件,事件车道减速率可通过驾驶模拟实验数据、历史事件数据取中位数,实现常见事件直接影响的量化。事件车道车辆减速率语言变量定义为{很低,低,中,高,很高},对应的模糊子集为{VL,L,M,H,VH},pL0越大,事件越严重。显然,归一化后,事件的论域为[0,1]。
输出的交通事件直接影响强度语言变量为{很低,低,中,高,很高},对应的模糊子集为{VL,L,M,H,VH},论域为[0,1]。
交通事件直接影响强度模糊系统输入和输出隶属函数如图4所示。

图4 交通事件直接影响强度模糊判别系统隶属函数图Fig.4 Membership function diagram of fuzzy judgment system for it direct impact intensity of traffic incidents
根据输入和输出函数的隶属函数以及规则库,制定交通事件直接影响强度模糊控制规则,如表3所示。
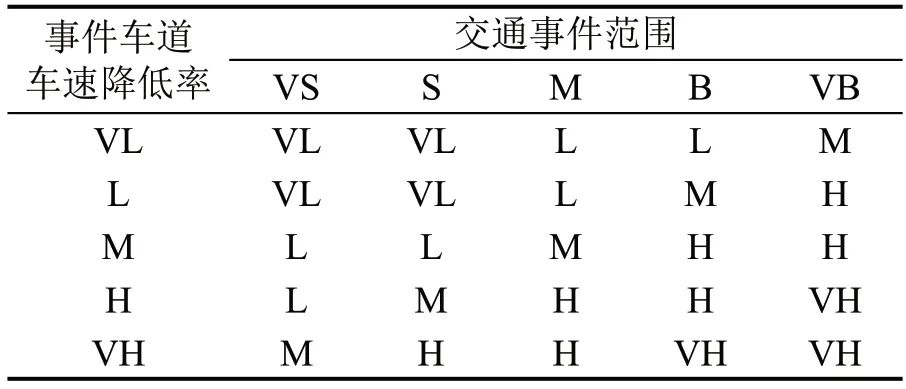
表3 交通事件直接影响强度判别模糊规则Table 3 Fuzzy rules for judging intensity of direct impact on traffic incidents
交通事件直接影响强度的基本论域定义为[0,1],其隶属度函数为三角形分布。计算后可得到交通事件的严重程度受其范围和道路条件影响而变化的值。
3.4 交通事件间接影响强度模糊判别子系统
根据相邻车道减速率和目标车道间距估计交通事件间接影响强度。相邻车道减速率与事件的间接影响正相关,当事件导致相邻车道无法通行时(如油罐车起火,危险品泄露等),车速降低率取1;当有左右两条相邻车道时,车速降低率取两条车道上的平均值。目标车道间距用目标车道中心线与事件车道中心线的横向间隔车道数表示。相邻车道减速率越高,目标车道间距越小时,交通事件间接影响越严重。
(1)相邻车道减速率
采用相邻车道减速率量化交通事件对相邻车道驾驶员行为的影响。为规范其论域,定义发生事件后,相邻车道上相邻车道减速率的计算公式为
相邻车道车辆减速程度语言变量定义为{很低、低,中,高,很高},对应的模糊子集为{VL,L,M,H,VH},归一化后,事件的论域为[0,1]。
(2)目标车道距事件车道的距离
用目标车道中心线与事件车道中心线的横向间隔车道数衡量目标车道距事件车道的距离。当事件占用多条车道时,这些车道均视为事件车道,取目标车道到事件最严重车道的距离为横向间隔车道数。因此,间隔车道数N的取值为0,1,2,3,4,5(取0 时为事件车道)。间隔车道数语言变量定义为{很低,低,中,高,很高},对应的模糊子集为{VL,L,M,H,VH},事件的论域为[0,1,2,3,4,5]。
输出的交通事件对间接影响强度语言变量为{很低,低,中,高,很高},对应的模糊子集为{VL,L,M,H,VH},论域为[0,1]。
交通事件间接影响强度模糊系统输入和输出隶属函数如图5所示。
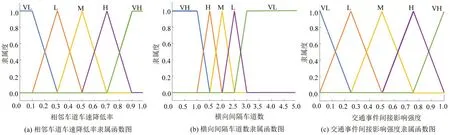
图5 交通事件间接影响强度模糊判别系统隶属函数图Fig.5 Membership function of fuzzy judgment system for degree of indirect influence of traffic incidents
根据输入和输出函数的隶属函数,制定交通事件对通行能力的间接影响程度判别的模糊规则,如表4所示。
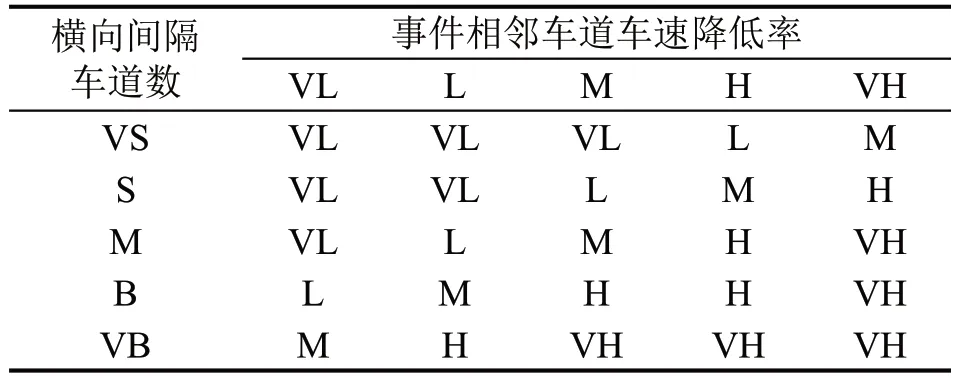
表4 交通事件间接影响程度判别的模糊规则Table 4 Fuzzy rules for judging degree of indirect impact of traffic incidents
交通事件的基本论域定义为[0,1],其隶属度函数为三角形分布。去模糊化计算后,求得事件对通行能力的间接影响强度随相邻车道驾驶员感知和距离变化而变化的数值。
3.5 通行能力折减率模糊判别子系统
根据事件对目标车道的直接影响强度及间接影响强度估计事件下通行能力折减率。将直接影响强度及间接影响强度两个中间变量作为输入,论域皆为[0,1],且隶属函数均为三角形分布。输出参数为事件下路段通行能力的折减率,隶属度函数分布如图6 所示。去模糊化后即可得到事件下路段通行能力的折减率,最终得出事件后的通行能力。
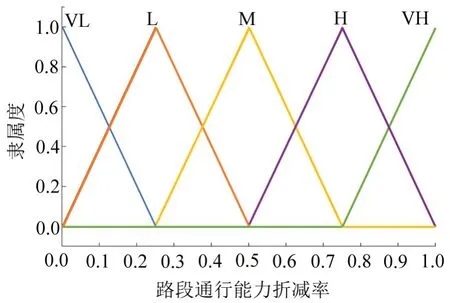
图6 交通事件对路段通行能力影响程度隶属函数图Fig.6 Subordinate function diagram of influence degree of traffic events on road section capacity
4 模型验证与效益分析
采用历史事件的视频案例来验证模型的有效性。数据表明,交通事故、车辆停滞等影响时间较短的交通事件占据道路交通事件80%以上的比例[3,16],故选取交通事故、车辆停滞、道路施工、货物倾覆这4类事件研究对象中最常见的交通事故、车辆停滞两种事件的4个典型场景展开模型验证。
本文基于交通事件发生后的实拍视频,提取交通事件长度和宽度作为模糊估计模型输入。首先,采用HCM中经典方法计算事件发生前路段的原通行能力。进而,提取交通事件类型,采集驾驶模拟实验数据、相同类型的历史事件数据(取中位数),确定相邻车道减速率。在本实证案例中,由于事件类型为交通事故车辆滞留,目标车道减速率均为1。根据上述输入,运用本文提出的模型估计交通事件下通行能力折减率。最后,将原通行能力与通行能力折减率相乘,得出交通事件下通行能力估计结果。
4.1 案例背景与参数设置
图7为4起交通事件的场景图。案例①为武深高速发生的一起多车相撞事故,案例②为一城市路段交通流航拍过程中的一起车辆停滞事件,案例③为淄博市龙凤苑东门北100 m 处路段上记录的两起交通事故,分别是车辆驶入绿化带和车辆倾覆。事件均发生在多车道路段,且路段车流量大。
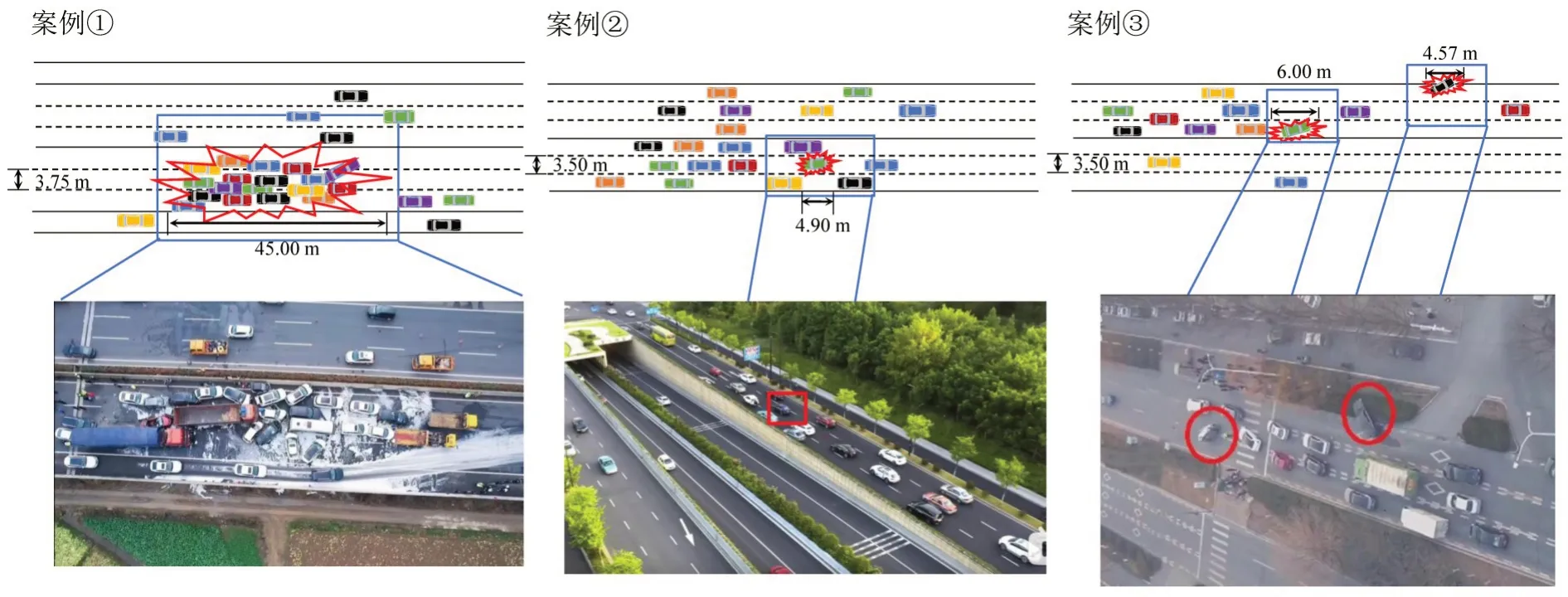
图7 案例场景图Fig.7 Case scenario
分别提取视频案例的道路几何参数和交通流参数,数据处理结果如表5所示。
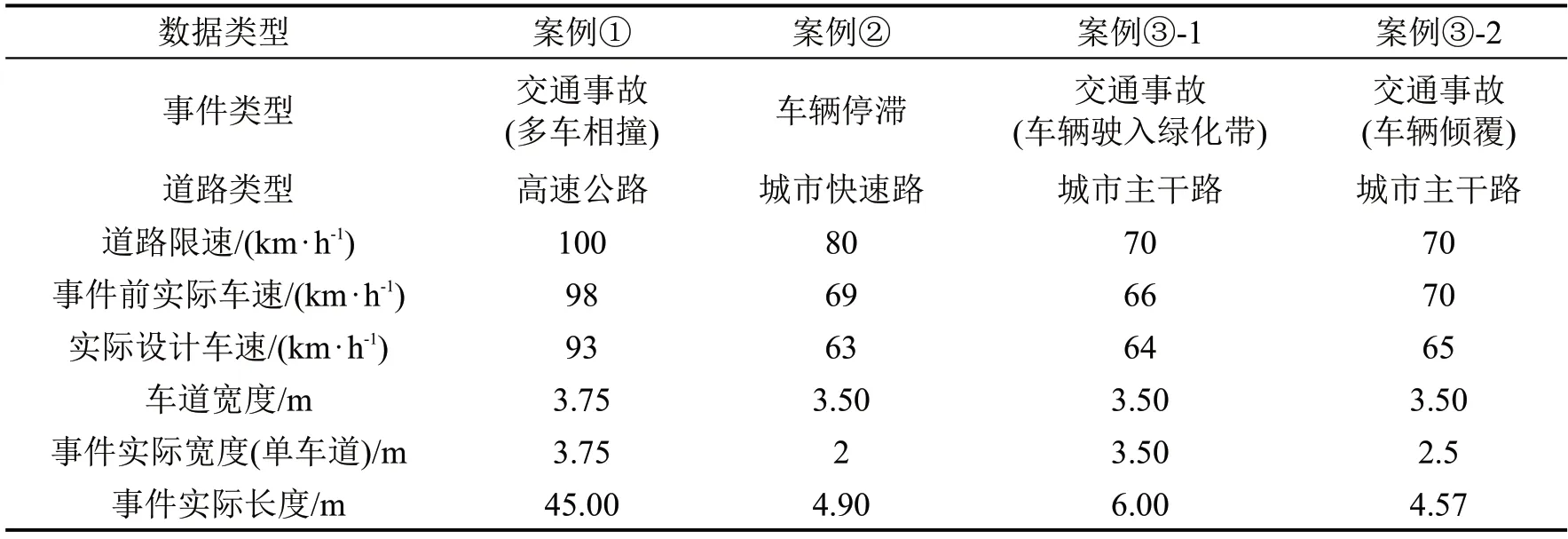
表5 案例交通事件基本参数Table 5 Basic parameter of case traffic events
对于未发生交通事件路段的实际通行能力,使用HCM中实际设计车速下的通行能力计算,即
其中,QMSF、、VU、Vr已由HCM 查表获得。计算结果如表6所示。由于HCM记录的方法要求对各种参数修正,而交通事件的发生会使这些参数受到非常态扰动,难以修正。考虑到工程项目中,常用车头时距计算流率和通行能力,因此,为避免复杂的参数提取和修正,事件后的通行能力实测值为
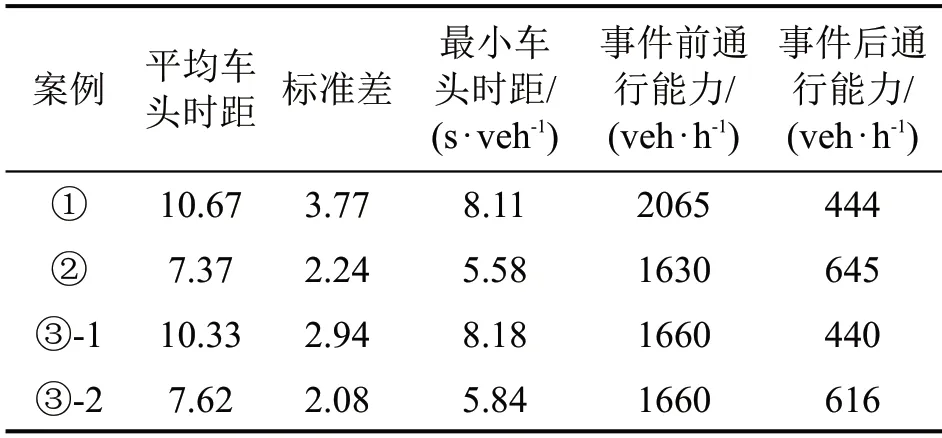
表6 案例分析事件前后的路段通行能力Table 6 Road capacity before and after event in case analysis
本文采集了每个事件相邻车道各20组车头时距,并取95%分位的车头时距值作为最小车头时距。同时,研究统计了车头时距的标准差,以衡量数据的离散和变化程度。其中,案例①取事故车流方向最外侧车道,案例②取事件车流方向靠近中央分隔带的内侧车道,案例③取事故车流方向的中间车道。4个交通事件的平均车头时距、标准差、95%最小车头时距,以及事件后的路段通行能力值如表6所示。
采用本文方法估计事件后的通行能力,相关参数取值在表5参数的基础上计算获得。其中,在各种类型道路路段上车辆正常情况下的行驶速度和发生事件后的行驶速度已由三自由度驾驶模拟器获得。每个模糊子系统对应的规则曲面如图8 所示。依照规则对各输入参数值解模糊计算,得到事件后的路段通行能力折减率。路段通行能力折减率与事件前后的通行能力关系为
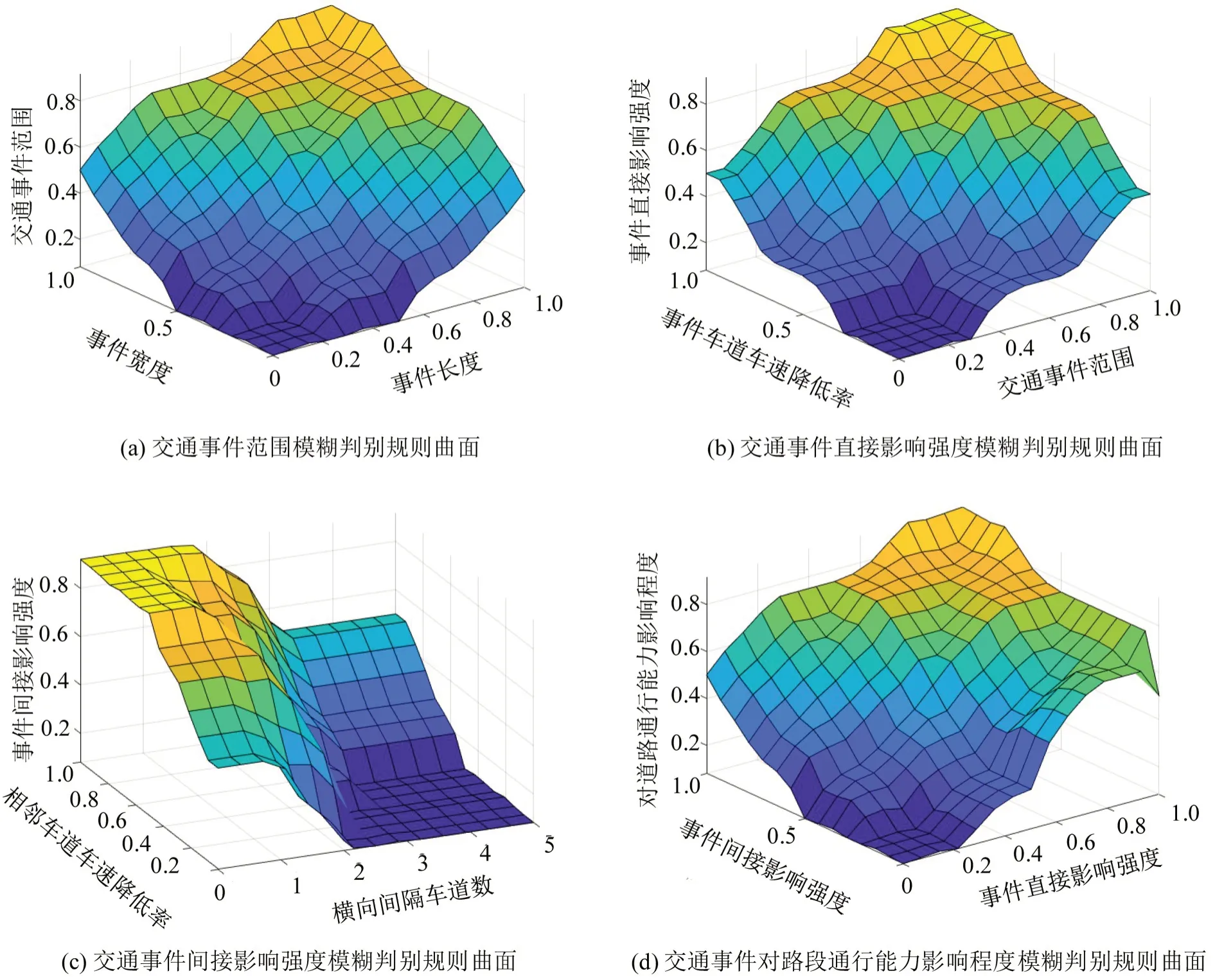
图8 4个模糊子系统对应的判别规则曲面图Fig.8 Surface graph of discrimination rules corresponding to four fuzzy subsystems
根据式(7),可得到模型估计的事件后路段通行能力值。相关参数和本文方法得出的事件后路段通行能力如表7所示。
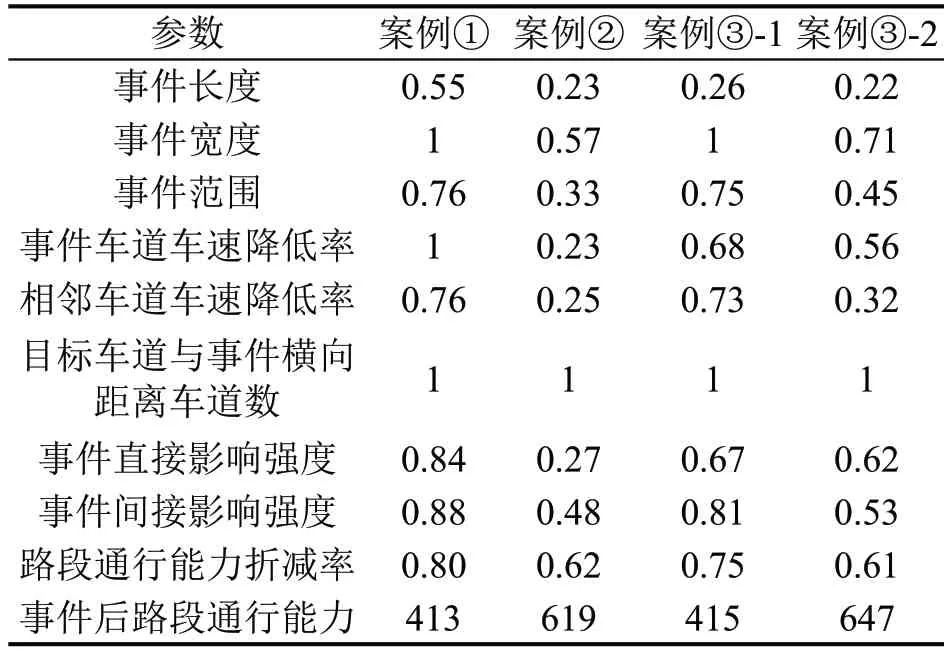
表7 模型参数取值Table 7 Model parameter values
4.2 有效性分析
对比本文提出的估计方法、HCM 折减车道法与案例视频实测值,做误差分析。其中HCM 折减车道法计算公式为
误差分析中,相对误差更能反映估计方法的可信度,误差分析结果如表8所示。

表8 误差分析结果Table 8 Error analysis results
从表8可知,本文提出的多层模糊估计方法的总平均相对误差为5.43%,HCM折减车道法总平均相对误差为52.03%。可见本文提出的估计方法误差在上述案例环境可以满足应用要求,且精度较高。上述案例视频数据的提取及处理严谨有效,包括2 类交通事件的4 个典型场景,平均误差结果分别为6.98%、4.03%、5.68%、5.03%,多层模糊估计方法可应用于多种场景。综上,本文提出的多层模糊估计方法可用于多种道路路段交通事件场景,估计精度可以满足工程应用需求。
5 结论
本文针对交通事件下路段通行能力估算问题提出了一种多层模糊的实时估计方法,得到主要结论如下:
(1)基于模糊逻辑思想搭建的多层模糊模型可以量化交通事件对通行能力的影响。通过构建隶属度函数与规则库,所提方法可以量化不同影响因素对路段通行能力的影响,有效应对交通事件对通行能力影响的模糊性。且隶属函数和规则库可以根据当地工程要求的实际情况不同而做出调整,其灵活性可以适用于多地区不同交通事件下的通行能力估计场景。
(2) 通过实际路段交通事件视频案例验证模型,对比分析交通事件下路段通行能力实测值、HCM 折减车道法与本文方法,本文提出的估计方法总平均误差为5.43%,远小于HCM 折减车道法的估计误差52.03%。验证了本文方法适用于多种交通事件场景,相较传统方法具有优越性,可为交通管理部门制定应急策略提供支持。
目前,本文着重研究了事件下路段通行能力估计这一基础问题,在后续的研究中,将进一步分析交通事件下网络交通流的运行规律,为交通事件管理的理论研究及实践应用奠定基础。此外,本文实证案例选取的交通事故、车辆停滞这2种事件案例的4个典型场景虽已尽可能覆盖更多的事件类型,但由于交通事件的发生具有随机性,案例数据难以获取,数据限制导致本文方法的适用性分析尚有不足。后续研究中,将通过微观仿真结合实际案例的方式实现更多场景实验,对本文方法的适用性及其参数灵敏度展开进一步研究。
猜你喜欢
工会博览(2022年5期)2022-06-30
卫星应用(2021年11期)2022-01-19
中国交通信息化(2021年2期)2021-07-22
科学大众(2021年9期)2021-07-16
成都信息工程大学学报(2021年6期)2021-02-12
中国交通信息化(2020年11期)2021-01-14
建材发展导向(2019年11期)2019-08-24
测控技术(2018年10期)2018-11-25
广东石油化工学院学报(2016年3期)2016-05-17