终端区交通拥堵识别及其时空演化特性分析
2023-12-28 02:53李善梅王雨鑫雷青蕾宋思霓王超
交通运输系统工程与信息 2023年6期
李善梅,王雨鑫,雷青蕾,宋思霓,王超
(1.中国民航大学,空中交通管理学院,天津 300300;2.浙江省通用航空产业发展有限公司,低空飞行服务中心,杭州 311600)
0 引言
目前,空中交通拥堵相态的识别主要依靠管制员的经验认知,复杂交通情况下拥堵识别的准确性难以保障。如何从科学角度,利用实际交通数据和管制员认知,准确识别空中交通拥堵,并在此基础上,挖掘复杂空中交通现象背后隐含的交通拥堵时空演化规律,成为亟需解决的问题。终端区是空中交通运行的主要瓶颈区域,终端区内的交通流具有高密度性和强汇聚性等特点,易引发交通拥堵,严重制约着整个空中交通运行的顺畅。因此,准确识别终端区交通拥堵状态,是制定有效拥堵管理措施的前提。
以往有关终端区交通流特性的研究多集中于理论建模与仿真分析。陈勇等[1]提出终端区容量建模的基本假设,并据此推导出终端区的基本容量模型。黎新华等[2]建立终端区交通跟驰模型,并提出基于跟驰稳定的终端区容量评估方法。张洪海[3]提出基于航迹运行(Trajectory Based Operation,TBO)模式下截点直飞方式与融合点方式进场交通流优化模型。MENON等[4]建模描述了空中交通环境中自定义的流量计数空域系统要素,建立空中交通流欧拉模型。张洪海等[5]运用Netlogo 仿真系统推演空中交通流基本参数变化趋势。IDRISSI 等[6]利用时间分离、进近阶段速度调整和点合并系统(PMS)保证交通流畅通。由于空中交通系统是一个复杂的开放系统,交通运行受天气、军航活动及通信导航监视(Communication,Navigation,Surveillance,CNS)设备等不同因素的影响,建模仿真方法难以将所有因素均加以考虑,并且,在建模仿真过程中需设置理想的假设条件,导致模型仿真结果与实际运行存在一定偏差,影响研究结果的准确性,难以体现真实交通流的运行状况。
随着空中交通数据采集越来越便捷,越来越多的航迹数据可以获取得到,而这些数据正是实际交通系统在多种影响因素综合作用下的真实反映。因此,基于数据驱动的空中交通流特性研究,越来越受到人们的关注,并取得了一定的研究成果。TAN 等[7]从复杂网络角度提出一种深度学习方法,用于识别拥塞情况。许炎等[8]结合交通流参数关系基本图与终端区空中交通运行方式和管制规则划分交通流相态,并建立交通流模型。ZHANG 等[9]利用测地线距离度量飞行轨迹相似度,采用改进的谱聚类算法对轨迹样本进行分类,并利用基于最小生成树的改进算法提取典型交通流。HU等[10]计算离散时间损耗队列的流量保护方程的净量变化,进一步确定流量与密度之间的关系。JIANG 等[11]从复杂网络的角度描述空中交通状况,使用独立分量分析(ICA)在线监测空中交通拥堵。
现有数据驱动的空中交通拥堵识别方法主要为聚类方法,此类方法完全从航迹数据出发划分交通状态,未考虑管制员的经验知识,因此,识别结果存在不被管制员接受的情况。近年来,核密度估计方法越来越广泛地应用于各领域的类别划分问题中。通过采用核密度估计将航迹数据和管制员经验相结合,不仅考虑数据分布情况,同时,将管制员对于交通态势总体认知经验考虑进来,使识别结果更容易被管制员接受。
鉴于此,本文将交通数据与管制经验相结合,提出一套基于交通流基本图理论与核密度估计算法的空中交通流拥堵识别方法,在此基础上,挖掘终端区交通拥堵的时空分布规律。首先,基于终端区实际航迹数据识别空中交通流;接着,基于基本图理论挖掘表征交通流状态的特征参数,分析各参数之间相互关系;然后,将核密度估计方法应用于交通流基本图当中,采用数据与经验双重驱动,获取交通流相态划分结果;最后,挖掘不同相态下的航迹分布特征及交通拥堵的时空分布规律。与现有空中管理人员凭借经验对空中交通相态进行分类相比,本文工作有助于提升空管人员对终端区交通相态掌握的科学性和准确性,以便采取更有效的空中交通拥挤管理措施,降低管制员工作负荷,提升空中交通运行效率。
1 空中交通流识别
终端区为航空器起降的繁忙区域,其内部交通具有交通结构复杂和航空器密度高等特点。受不确定因素的影响,航空器在飞行过程中,管制员会对其速度、高度及航向进行调整,导致其飞行航迹并非严格按照终端区内部事先划定的进离场飞行程序飞行,航迹空间分布较为散乱,导致无法直接提取终端区内各条交通流的航迹数据。因此,需要识别终端区交通流,以便后续继续挖掘空中交通流的演化特性。
航迹聚类是目前交通流识别的主要手段,其目的为从混乱的轨迹数据中将相似航迹归为一类,其中,轨迹的相似性度量为航迹聚类的关键基础。常见的度量方法有:欧式距离和hausdorff距离等。不同数据结构需选择相适应的相似度度量满足聚类要求。由于终端区交通密度大,航迹具有强机动性与差异化等特征,基于欧式距离的度量方法可以较好地适应轨迹数据结构。同时,DBSCAN(Density-Based Spatial Clustering of Applications with Noise)聚类算法可以对任意形状的数据集进行聚类,而K-Means 等聚类算法一般只适用于凸数据集;且DBSCAN聚类结果没有偏倚,而K-Means等聚类结果对初始值较为敏感。故本文选用基于欧氏距离的DBSCAN聚类方法对重采样后的航迹样本进行交通流聚类划分。依据航迹聚类的划分结果,可将样本中所有航迹划分为t个类别,每一类别视为1条交通流。
采用2019年10月13日~26日北京终端区进场航迹数据,对航迹数据进行插值及重采样等预处理工作,通过线性插值将原航迹数据填充为1 s 时间间隔的航迹点序列,通过重采样工作将各条航迹转变为具有相同航迹点数据的航迹,便于后续航迹聚类时计算各航迹之间的距离。在此基础上,使用基于欧式距离的DBSCAN 聚类方法,对终端区内部约9483 条重采样后的航迹P={p1,p2,…,p9483} 进行聚类操作。DBSCAN算法步骤如下。
Step 1 初始化参数,设定邻域半径(ε)和最小邻居数(κ)。
Step 2 选择一个未被访问过的航迹pi。
Step 3 查找pi的ε-邻域内的所有航迹,即与pi欧式距离小于等于ε的航迹,若ε-邻域内的航迹数量大于等于κ,则将pi标记为中心航迹,并将其ε-邻域内的航迹添加到一个新的类中;否则,将pi记为噪声数据。
Step 4 对于新簇中的每条航迹,如果其邻域内还有未被分配到任何类的航迹,则将其添加到当前类中。
Step 5 重复Step 2~Step 4,直到所有航迹均被访问过。
北京终端区进场程序如图1 所示,有5 条进场程序,故设定航迹聚类数目为5,聚类结果如图2所示。得到5 条交通流,其走势和程序图基本一致,不同颜色代表不同交通流。
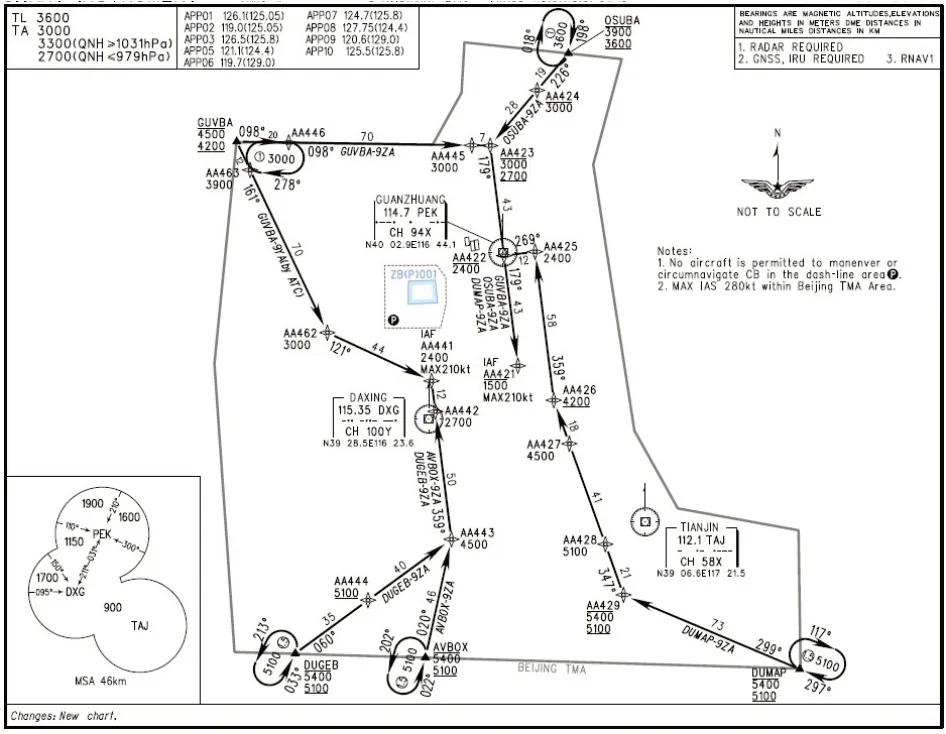
图1 北京终端区飞行进场程序Fig.1 Beijing terminal area flight approach procedure
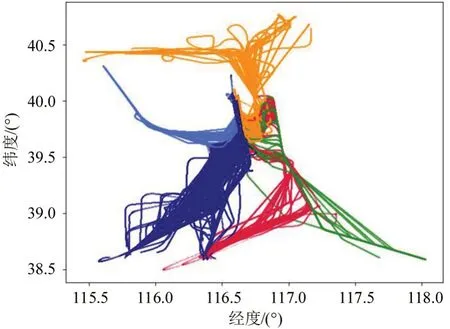
图2 航迹聚类结果Fig.2 Trajectory clustering effect
2 基于基本图的空中交通流三参数挖掘
2.1 空中交通流特征参数提取
交通流特征是构成交通流的各条航迹基本属性的集体表现。当进入终端区的航空器数量较多,交通处于拥堵情况下,终端区管制员经常会减慢航空器的下降速度,实行雷达引导,拉开航空器之间的间隔(导致航空器在终端区内飞行距离变长,从而相对速度降低)。基于上述管制行为特点,考虑采用流入交通量、相对速度和高度变化率表征空中交通流状态。
首先,挖掘单条航迹的基本属性,具体如下。
(1)航迹时长tji
tji为第j条交通流中航空器i,自进入终端区的起始航迹点至飞离终端区的末端航迹点之间的飞行时间。
(2)航迹距离dji
dji为第j条交通流中航空器i,自进入终端区的起始航迹点至飞离终端区的末端航迹点之间的飞行距离。
(3)相对速度vji
vji为第j条交通流标称航迹距离(航空器所属交通流中心航迹的长度)与该交通流中航空器i航迹时长的比值。
(4)高度变化率hji
hji为第j条交通流中航空器i,单位时间内上升/下降的距离。
然后,基于上述单个航迹的基本属性,定义交通流的特征向量ej(t)=[Nj(t),Hj(t),Vj(t)],具体含义如下。
(1)Nj为统计间隔t内第j条交通流中流入终端区的交通流量,即
式中:Ii为0-1 变量,航空器i在时段t之前不在终端区内,在时段t内进入终端区时,Ii=1;否则,Ii=0。
(2)Hj为统计间隔t内第j条交通流中航空器的平均高度变化率,即
(3)Vj为统计间隔t内第j条交通流中航空器的平均相对速度。
2.2 空中交通流基本图分析
基于第1节交通流聚类结果,以终端区西南方向DUGEB 入口交通流为例,进行空中交通流的基本图分析。基于该方向交通流2788 条航迹数据,统计每30 min该交通流的流量、平均相对速度和平均高度变化率,绘制三参数时序图,如图3 所示。可以发现,平均高度变化率与平均相对速度具有较强的波动性,而流量特征序列呈现出较强的周期性。下面进一步分析不同特征间的相关关系。
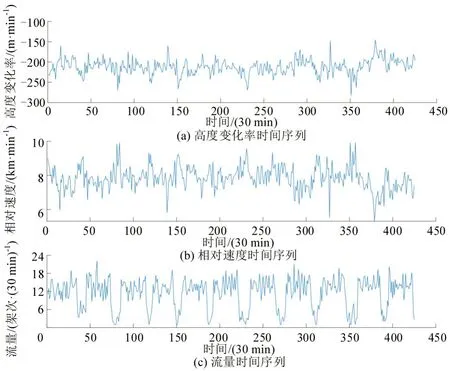
图3 三参数时序图Fig.3 Timing diagram for three parameters
绘制交通流三参数的基本图,如图4 所示,图4(a)~图4(c)为流量、相对速度与高度变化率的关系图。为便于对空中交通流基本图的解释,图4(d)给出了经典的交通流基本图。
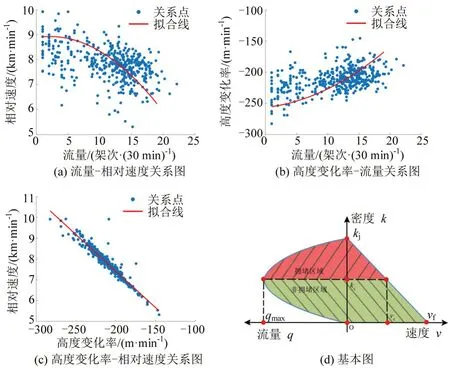
图4 空中交通流基本图Fig.4 Fundamental diagram of air traffic flow
(1)从图4(a)可以看出:流量和相对速度近似服从抛物线关系,随着流量的增加,平均相对速度整体呈下降趋势,交通趋于拥挤,数据点密度增加;当流量较小时,相对速度较大,数据点分布较分散。
(2) 从图4(b)可以看出:流量和高度变化率也近似服从抛物线关系,随着流量的增加,高度变化率呈上升趋势,交通趋于拥挤,数据点密度增加;当流量较小时,高度变化率绝对值较小,且数据点分散。可见,对于空中交通流基本图,较难发现如同交通流基本图呈现出的抛物线右半部分非常拥堵情况。这是由于终端区内部航空器的运行完全由管制员进行全局性质的管理,在扇区内,航空器过多或飞行态势过于复杂时,管制员往往提前采取限流措施,避免严重拥堵情况的发生。
(3)从图4(c)可以看出:平均高度变化率与平均相对速度呈现较为严格的线性关系,随着交通拥堵程度的增加,平均相对速度和高度变化率均呈现下降的趋势,且中间部分数据点分布集中,两端较为分散。
(4) 从图4(d)可以看出:地面交通领域常用流量、密度和速度作为交通流的三参数,并根据其相互关系表征交通拥堵状态。由于地面交通中车辆主要在二维空间沿道路行驶,而终端区内的航空器主要在三维空间运行,具有雷达引导、变高度和变速度等行为。因此,空中交通流的运行特点与地面交通有所不同,不能直接套用交通流基本图理论分析空中交通。通过拟合空中交通流高度变化率、流量和相对速度三参数两两特征间的关系发现,其呈现出与交通流基本图相一致的分布特征,因此,本文采用这3个参数描述空中交通流。
3 基于核密度估计的空中交通拥堵识别
空中交通流相态划分具有一定的模糊性,空管实际运行中,基于经验的相态划分方法具有较大的主观性。现在流行的聚类方法主要从数据驱动角度进行相态划分,识别结果较难被管制员认可。因此,有必要将数据与管制员的经验相结合,即考虑管制员对交通态势的总体认知,提高相态识别结果的可用性。空中交通流相对速度与高度变化率的线性相关性为采用核密度估计方法进行交通相态划分提供了条件。因此,本文拟采用高斯核密度估计方法划分交通流相态。
3.1 高斯核密度估计原理
高斯核密度估计方法属于数据驱动方法,避免了主观经验影响,无需概率密度分布的假设。该方法基本思想为采用平滑的峰值函数(“核”)拟合观察到的数据点,从而模拟真实的概率分布曲线。该方法认为,当已知某事件的概率分布时,若某数值在观察中出现,则可以认为这个数的概率密度较大,这个数值周围数值的概率密度也较大,与该数值相差较多的数值的概率密度则较小。
假设x1,x2,…,xn为n个离散随机样本,xi为第i个观测数据。x为一个具有d维特征的样本点,x∈ℝd,其概率密度函数f(x)未知,则此概率密度函数的高斯核密度估计为
式中:h为带宽(窗宽或平滑系数);n为样本容量;K(·)为核函数,并且满足条件为
式中:u为K(u)中的自变量,即K的参数;μ2为核函数K(u)的二阶矩。
求解MISE 最小化有两种方法。第1 种,采用交叉验证方法,使用部分数据作为训练集估计fh(x),剩余数据作为测试集,用于以某种方式估计MISE。第2种,当N→∞的极限下,寻找最佳带宽的解析公式,MISE为
式中:o为所需的函数项的阶数小于或等于其他已知函数项的阶数。
略去式(8)中的高阶项,则得到渐进积分均方误差 AMISE(Asymptotic Mean Integrated Square Error)为
对式(10)求偏导数可得到使AMISE 取最小值时的带宽,此带宽h 为最优带宽。
3.2 基于高斯核密度估计的空中交通流拥堵识别流程
基于高斯核密度估计原理,建立基于高斯核密度估计的交通流相态划分方法。首先,基于核密度估计获得平均高度变化率H和平均相对速度V联合分布的核密度函数;然后,寻找水平曲线轮廓,将H-V散点划分为两种状态,曲线内部的点为典型状态,曲线外部的点为非典型状态,即分别对应交通流的典型行为和非典型行为。具体步骤如下。
Step 1 核密度函数计算
利用高斯核密度估计算法,计算平均高度变化率与平均相对速度的联合概率密度函数。
Step 2 曲面切割阈值的确定
Step 3 水平曲线分割
基于求解得到的z*值,在z*值处切割曲面(H,V),从而定义一个水平曲线c(H,V),该曲线内点的总数占总体的概率1-α部分,视为典型状态下的点,曲线外的点视为非典型状态下的点。
Step 4 相态划分阈值确定
曲线将数据点划分成不同部分,各部分对应不同相态。由于平均变化率与平均相对速度呈线性关系,因此,可基于曲线划分结果确定平均相对速度阈值,用于后续交通流相态的识别。提取Step 3得到的水平曲线两端端点,分别提取各端点周围最近的n个点(本文以n=10 为例),计算平均相对速度的平均值,作为划分该端点两端相态的阈值。获得平均相对速度的两个阈值,用来将交通流划分为3个相态。
3.3 北京终端区交通拥堵识别算例分析
基于上述方法,对北京终端区DUGEB 方向交通流进行高斯核密度估计。采用该交通流的平均相对速度和平均高度变化率数据,绘制其3D 渲染图,如图5 所示。可见,整个分布区域主要集中在两种模式上,即高密度模式和低密度模式,大部分区域属于高密度模式,表明该交通流处在高密度模式下的时间较多。
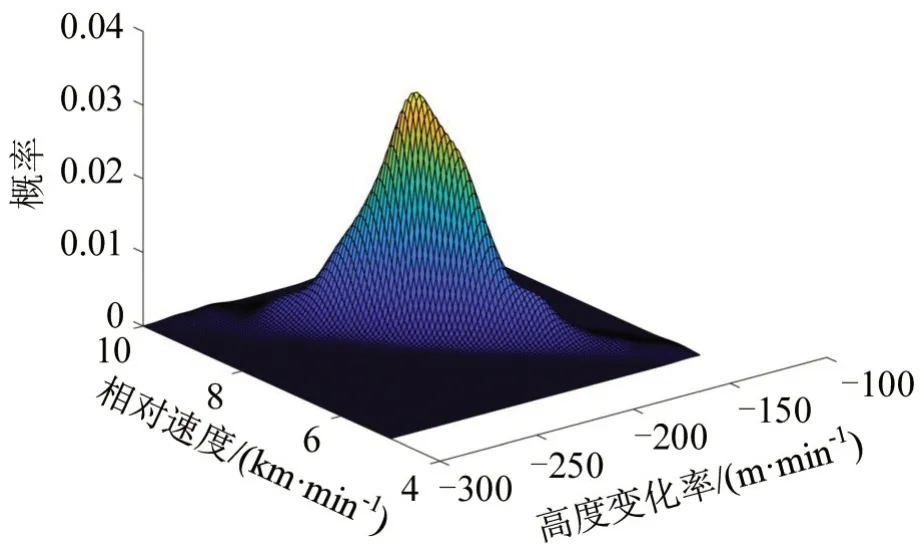
图5 变化率-相对速度联合分布核密度估计Fig.5 Decline rate-relative velocity joint distribution kernel density estimation diagram
依据交通流拥堵识别方法,分别令α等于0.1,0.2,0.3,0.4,0.5,识别交通流状态,并统计不同状态下的平均相对速度,如表1 所示。可以看出,当α越大,自由态平均相对速度越小,拥堵态平均相对速度越大,平稳态平均相对速度范围则越小。
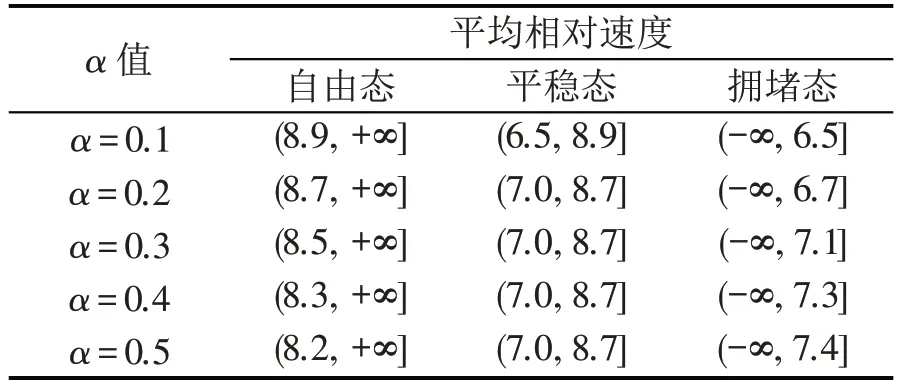
表1 不同α 下各状态的平均相对速度阈值Table 1 Average relative speed threshold of each state under different α
通过咨询北京终端区资深管制员,采用专家打分法让专家基于经验给出不同相态之间的平均相对速度阈值,统计各专家对速度阈值打分的平均值,得到综合评分结果。将专家评分结果与表1中各α值下各相态的相对速度统计结果进行比较发现,当α=0.1 时,聚类出来的各相态平均相对速度分布情况与专家打分最为接近。因此,选用α=0.1的聚类结果进行后续研究。可见,相较于典型统计学确定α阈值方法,结合专家经验的方法使计算结果更好地符合管制员对交通态势的实际认知,聚类结果更易被管制员所接受。
当α=0.1 时,相态划分结果如图6所示。水平曲线将数据点大体分为两类:一类是,圈内的点,相对速度和高度变化率的值处于中等;另一类是,圈外的点,主要分布于圈的左上侧和右下侧,左上侧的相对速度和高度变化率较大,右下侧的相对速度和高度变化率较小。可见,核密度估计法成功地将交通流划分为3个相态:相对速度和高度变化率较高的自由态、相对速度和高度变化率中等的平稳态与相对速度和高度变化率均较低的拥堵态。其中,位于右上方圈外的点,可视为异常点,相态分析时不做考虑。
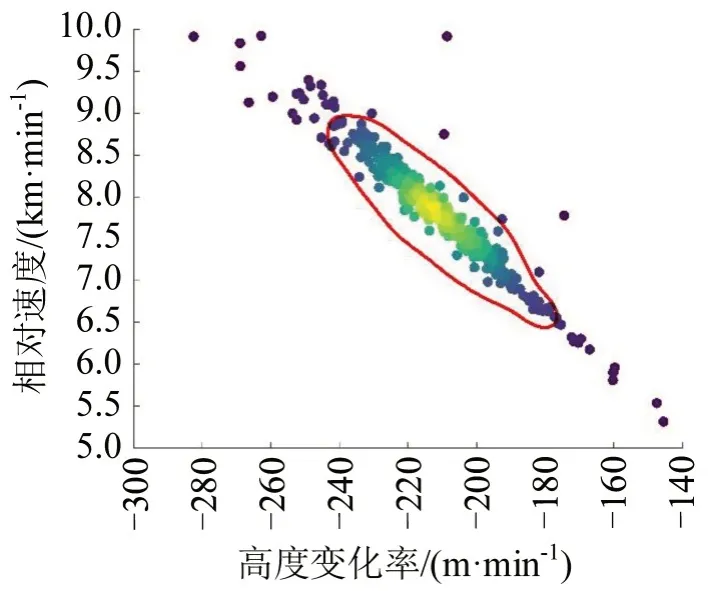
图6 基于核密度估计的划分结果Fig.6 Partitioning results based on kernel density estimation
进一步,确定各相邻相态之间平均相对速度的阈值。自由态与平稳态之间的阈值为8.9 km·min-1,平稳态与拥堵态之间的阈值为6.5 km·min-1。因此,可得到交通流相态判别标准为
4 终端区不同交通相态的航迹分布特性
为挖掘不同相态的交通特征,同时,验证基于核密度估计的相态划分方法的有效性,本文从飞行航迹和管制行为的角度,进一步挖掘不同相态下交通流的微观特征。
提取不同交通流相态下的航迹数据,绘制水平剖面和垂直剖面航迹图,如图7所示。可以看出,3种相态下的航空器航迹具有如下特征。
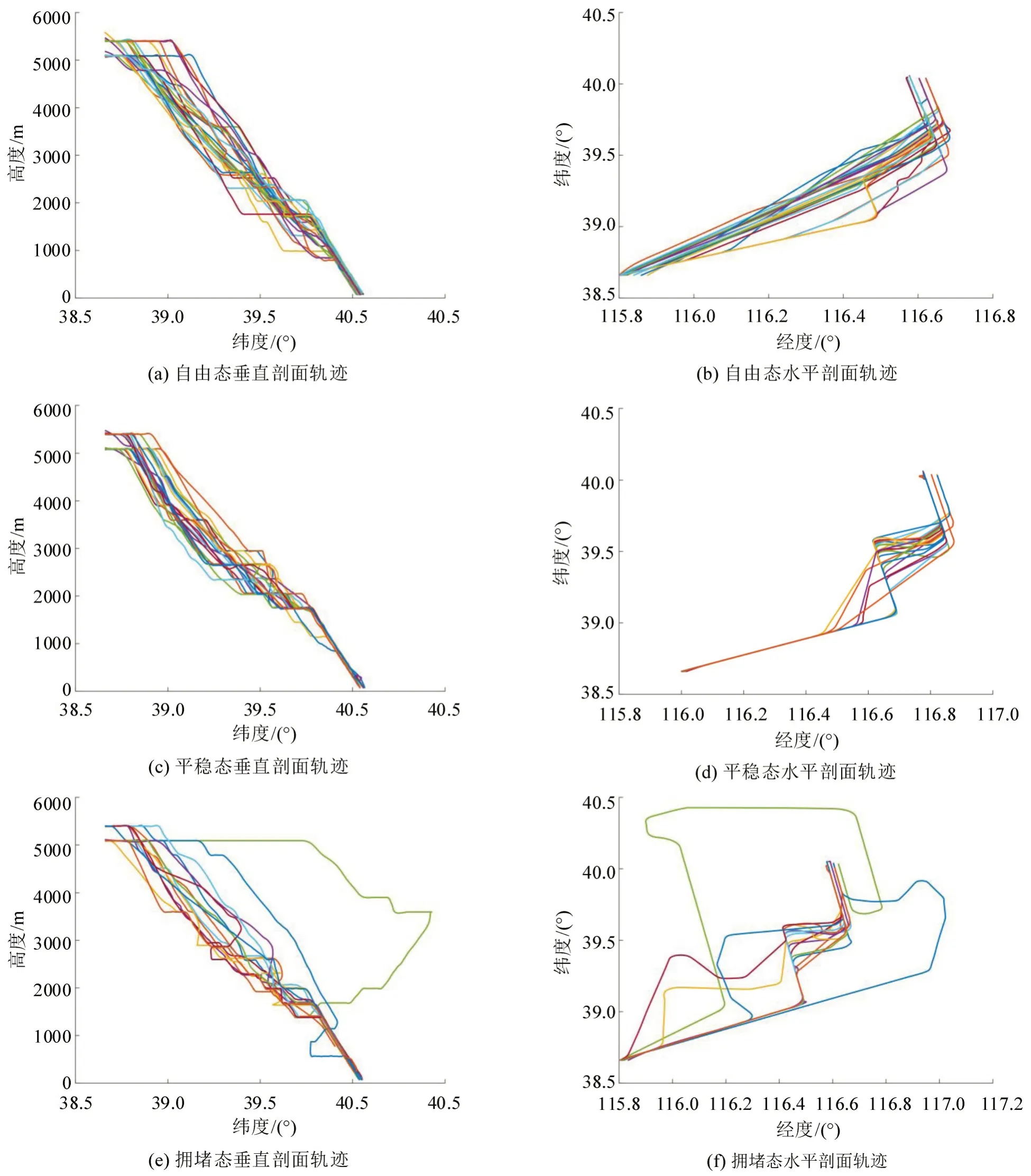
图7 3种相态下航空器水平剖面和垂直剖面航迹Fig.7 Flight path of horizontal section and vertical section of aircraft in three states
(1)自由态
航空器水平和垂直剖面的航迹分布均较为整齐,航空器数量较少,管制员大多指挥航空器直飞到跑道入口。航迹相似性较高,复杂性和冲突态势较低,可实现连续下降。
(2)平稳态
航空器水平和垂直剖面的航迹分布整齐性较自由态有所下降,航空器数量适中,管制员大多指挥航空器有一个较小范围的雷达引导飞行,直飞情况较少,航迹相似性较自由态有所下降,航迹复杂性有所增强。
(3)拥堵态
航空器水平和垂直剖面的航迹分布整齐性在3种相态中最差,航空器数量最多,管制员往往指挥航空器有一个较大范围的雷达引导飞行,基本没有直飞情况。航迹差异性很大,部分航空器存在绕飞的情况,高度剖面上存在多阶段分布下降情况,航空器之间的复杂性最高。
为进一步从定量的角度挖掘3 种交通流相态的航迹特点,分别统计不同相态下航迹的飞行时长、飞行距离和转向次数,并进行对比分析。
(1)飞行时间对比分析
不同相态下,航迹的平均飞行时长、最小飞行时长、最大飞行时长及其方差如表2 所示,并绘制不同相态下飞行时长的箱型图,如图8(a)所示。可以看出,自由态下航空器的平均飞行时间最短,拥堵态的平均飞行时间最长。随着交通流拥堵的严重性不断增强,航空器的平均飞行时间随之增长,自由态的平均飞行时间为1240.9 s,且各航空器飞行时间分布较为集中;平稳态的平均飞行时间为1469.8 s,分布范围较畅通态有所扩大;拥堵态的平均飞行时间为1827.5 s,大约是自由态的1.5 倍,且各航空器飞行时间分布较为发散,方差最大。
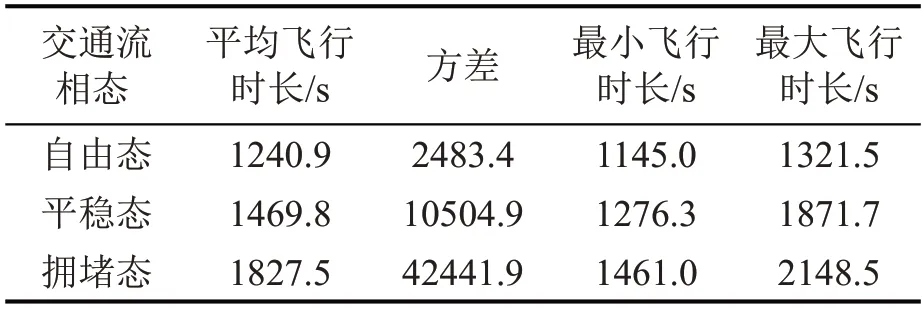
表2 3种相态飞行时间对比Table 2 Comparison of flight time in three states
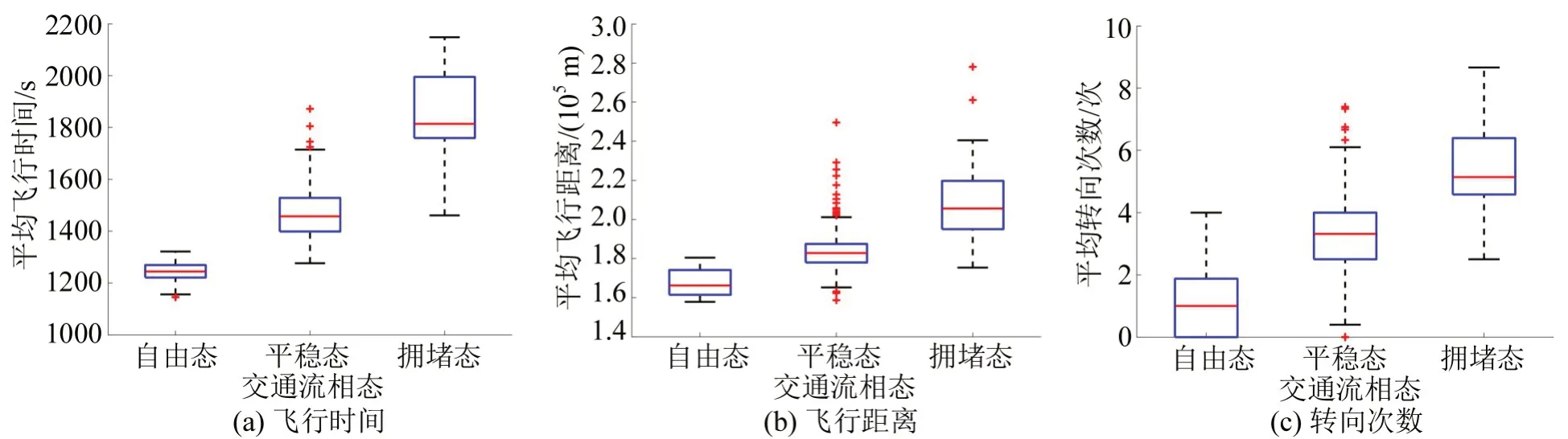
图8 航空器飞行特征箱体图Fig.8 Aircraft flight characteristics box diagram
(2)飞行距离对比分析
不同相态下,航迹的平均飞行距离、最小飞行距离、最大飞行距离及其方差如表3 所示,并绘制不同相态下飞行距离的箱型图,如图8(b)所示。

表3 3种相态飞行距离对比Table 3 Comparison of flight distance in three states
可以看出,自由态下,航空器的飞行距离最短,拥堵态的飞行距离最长。与图7 中呈现出的结论一致,自由态下,航空器直飞现象较为明显;平稳态下,航空器沿进场飞行程序飞行较多;拥堵态下,航空器绕飞现象较为严重。随着交通流拥堵的严重性不断增强,航空器的飞行距离随之增长,自由态的平均飞行距离为167595.9 m,且各航空器飞行时间分布较为集中;平稳态的平均飞行距离为183705.5 m,分布范围较畅通态有所扩大;拥堵态的平均飞行距离为211845.9 m,大约是自由态的1.3 倍,且各航空器飞行距离分布较为发散,方差最大。
(3)转向次数对比分析
统计不同交通流相态下航空器的平均转向次数依次为:自由态,1.2593次,大部分航空器只在由进场方向转向跑道方向时实施1次机动转弯;平稳态,3.5231次,多数航空器实施标准进场程序,在对准跑道方向前进行3次机动转弯;拥堵态,5.4545次,大多航空器的飞行轨迹较为复杂,存在“绕飞”情况,在对准跑道方向前多次实施机动转弯飞行。进一步,绘制平均转向次数箱型图如图8(c)所示,可以发现,自由态下转向次数最低,与图7中呈现的该相态下管制员大多指挥航空器进行直飞相一致;拥堵态下,管制员给航空器发布的雷达引导指令较多,且引导范围较大,因此,该相态下的平均转向次数最多。从箱型图可以看出,平稳态下转向次数的分布最为集中,主要是由于该相态下,管制员大多引导航空器沿进场程序飞行,转向次数较为固定。
5 终端区交通拥堵的时空分布特性
基于交通流相态的划分结果,从时间和空间两个维度研究终端区交通拥堵的分布规律。
5.1 网格划分及参数统计
首先,对终端区进行网格划分,为便于分析,基于航迹分布情况,将终端区人为划分成4×5 的矩形,如图9(a)所示。对划分所得的网格进行编号,从左到右,从上到下,网格编号从1 开始递增,其中,没有航迹信息或者航迹信息较少的网格,属于无效网络,无需对其编号,中间部分(例如,网格3和网格8中间的网格)的航空器趋于落地,基本沿进近程序运行,管制员不再对其有较多调整,大部分航班已移交给塔台管制员管理,故此部分不是终端区管制员的重点关注区域,如图9(b)所示,编号网格区域涵盖了终端区管制员关注的主要区域。
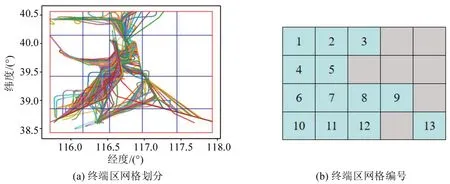
图9 终端区划分结果Fig.9 Terminal area meshing results
然后,计算各网格每30 min为一时间片的平均相对速度V,并根据式(13)得到各网格不同时段的交通相态。
5.2 交通拥堵的时间分布特征
基于各网格拥堵相态的识别结果,统计终端区各时段不同相态网格的比例,并绘制分布图,如图10 所示,发现终端区交通相态具有时间不均衡特性。可以看出,0:00-6:00终端区内各网格均处于自由或平稳状态,并以自由态为主;6:00-9:00 平稳态比例逐渐上升,交通态势由自由态开始向拥堵态过渡;9:00开始,拥堵态比例开始上升,平稳态和自由态比例均有所下降,出现较多拥堵区域,在14:00时,拥堵最为严重。终端区整体交通状况在20:00开始逐渐好转。
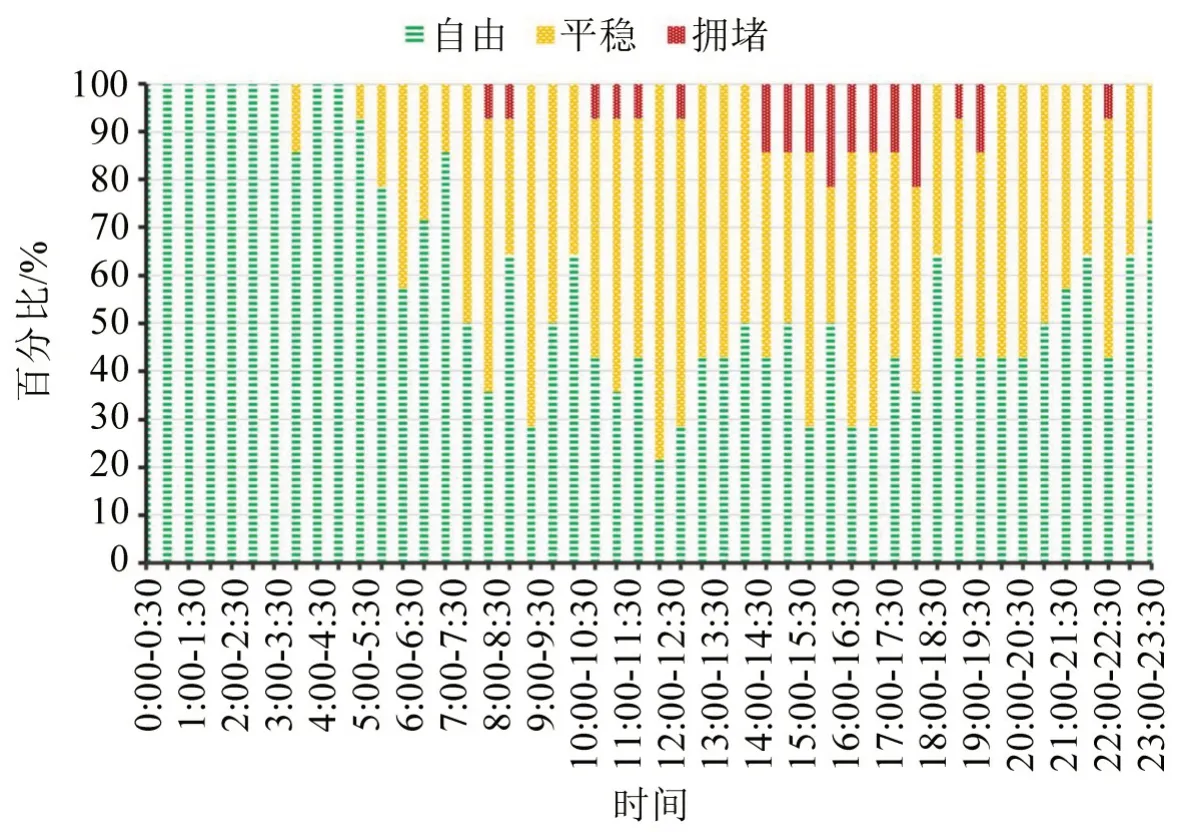
图10 终端区交通各状态时间分布Fig.10 Terminal area traffic states time distribution diagram
进一步挖掘各个网格交通状态随时间的变化情况,以网格3、网格5、网格7 及网格8 为例,给出其交通状态分布情况,如图11所示。可以看出,网格3和网格5的拥堵情况较网格7和网格8严重,基本上,5:00-23:00 均有拥堵现象发生。若按拥堵比例超30%时段视为拥堵时段,则网格3比较严重的时段主要集中在10:30-12:00、14:30-15:30 和16:30-17:00,共3 h。网格5 比较严重的时段集中在11:30-12:00、14:00-14:30、18:30-19:00和19:30-20:30,共2.5 h。因此,当处于15:00-17:00时段时,管制员应重点关注网格3的交通态势;当处于18:00-21:00时段时,管制员应重点关注网格5 的交通态势;当处于10:00-12:00 和14:00-15:00 时段时,管制员应同时关注网格3和网格5的交通态势。
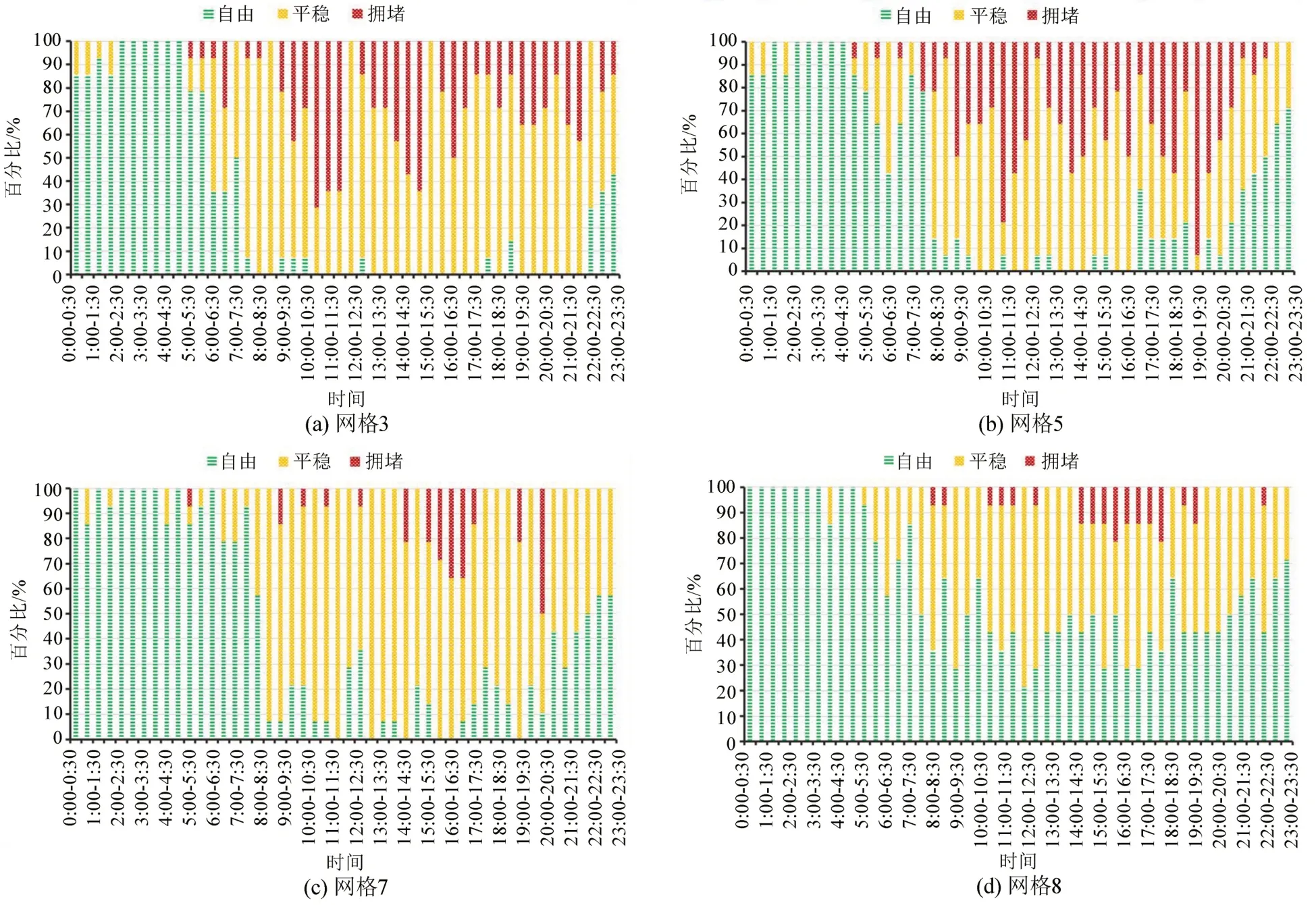
图11 典型网格交通状态时间分布Fig.11 Time distribution of typical grid traffic conditions
由于经过网格7 和网格8 的航班量相对较少,其拥堵态势没有网格3和网格5严重。网格7和网格8 在0:00-8:00 大部分时间均处于自由态和平稳态,从8:00 开始有少部分时间出现拥堵现象,8:00-14:00自由态较少,平稳态较多,拥堵态较少,14:00-19:00拥堵情况比较频繁,拥堵情况在19:00以后开始缓解。
5.3 交通拥堵的空间分布特征
基于各网格拥堵相态的识别结果,统计终端区交通相态在空间上的分布情况发现,其具有空间不均衡特性。部分时段各个网格交通状态分布情况如图12 所示。可以看出,交通拥堵相态主要集中在网格2、网格3、网格5、网格7、网格8及网格9,这些区域也是终端区进场交通流汇聚之处,交通态势较为复杂。另外,随着时间的变化,拥堵网格区域也发生着变化。例如,13:30-14:00 时段,网格3 和网格5 为拥堵态,网格7、网格8 及网格10 为平稳态,其余网格为自由态;14:00-14:30时段,网格3和网格5 已由拥堵态转变为平稳态,网格8 和网格10由平稳态转为自由态,网格13 由自由态转为平稳态;14:30-15:00时段,网格3和网格7由平稳态转为拥堵态,网格8 和网格9 由自由态转为拥堵态。可见,管制员应重点关注网格2、网格3、网格5、网格7、网格8及网格9区域,及时发现拥堵的产生,并对其进行疏导,以期提高终端区整体的运行效率。
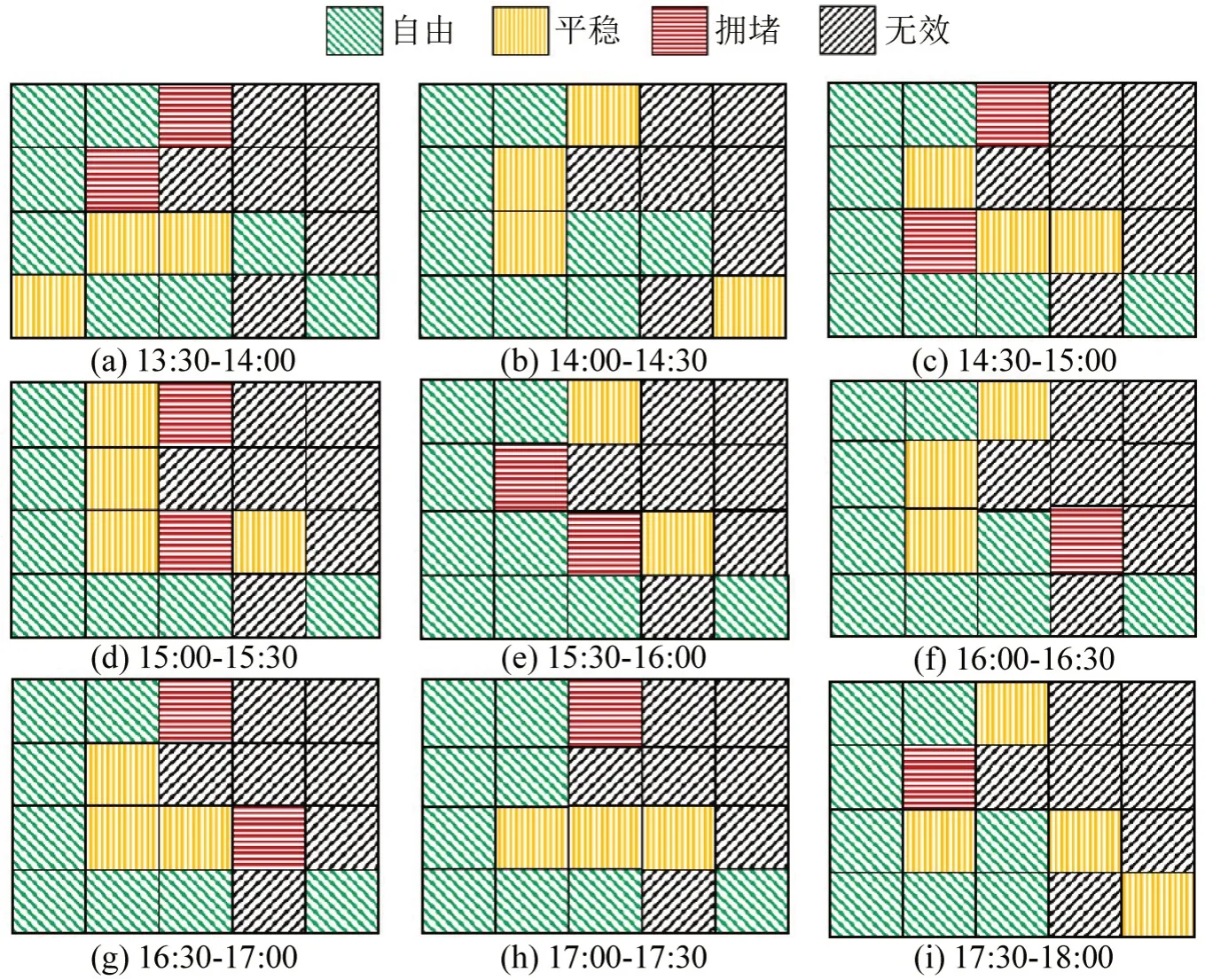
图12 终端区交通状态空间分布Fig.12 Spatial distribution of traffic state in terminal area
6 结论
本文提出一种新的空中交通流拥堵识别方法及其时空演化分析思路。将核密度估计方法和交通流基本图理论与管制员的经验知识相结合。传统方法仅依靠聚类算法划分交通状态,忽略了管制员对交通态势的整体认知,导致识别结果容易受到质疑。本文通过将数据分布情况与管制员的经验相结合,使识别结果更符合实际,易被管制员所接受。此外,本文从航迹分布特征和基于网络划分的拥堵时空分布特征等角度进行分析,揭示了终端区交通拥堵的时空分布规律,提高管制员对交通态势把握的准确性。
研究结论如下。
(1)考虑终端区管制员雷达引导、调速度及调高度等管制行为特点,基于基本图理论挖掘能够表征空中交通流相态的交通流的特征参数:交通量、平均相对速度和平均变化率,且平均相对速度与平均变化率呈现较强的线性关系,可用于识别交通拥堵态势。
(2)将航迹数据与管制知识相结合,基于高斯核密度估计方法识别终端区交通流拥堵状态,得到划分交通相态的相对速度阈值。拥堵相态下的航迹存在雷达引导等复杂管制行为,飞行轨迹、飞行时长、飞行距离和转向次数均较高,说明本文拥堵识别方法的有效性,识别结果更符合管制员认知。
(3)北京终端区交通拥堵具有时间和空间分布的不均衡特性。时间上,该终端区拥堵时段主要分布于9:00、14:00和19:00左右;空间上,拥堵常发区域主要位于中部区域,并挖掘出不同区域易发生交通拥堵的时段。这些拥堵时空分布规律可提高管制员对拥堵态势把握的准确性与科学性。
猜你喜欢
廊坊师范学院学报(自然科学版)(2022年3期)2022-10-11
北京航空航天大学学报(2022年8期)2022-08-31
中国应急管理科学(2022年2期)2022-05-23
科技创新与应用(2021年24期)2021-09-08
科技视界(2021年4期)2021-04-13
消费导刊(2019年12期)2019-08-21
材料科学与工程学报(2016年4期)2017-01-15
高原山地气象研究(2016年3期)2016-02-28
中国塑料(2015年4期)2015-10-14
石油化工应用(2014年11期)2014-03-11