考虑风浪影响下的船舶节能航线优化
2023-12-28 02:54计明军胡寒霖高振迪方婉薇
交通运输系统工程与信息 2023年6期
计明军,胡寒霖,高振迪,方婉薇
(大连海事大学,交通运输工程学院,辽宁大连 116026)
0 引言
原油贸易在全球经济中扮演重要角色,其高能量密度和良好储存性使其成为现代社会不可或缺的能源。然而,原油分布不均衡,全球原油主要集中在东半球和北半球。中东波斯湾、北非和墨西哥湾地区的原油储备超过了世界总量的1/2。由于海运具有大运量和低运费的经济特点,现已成为原油的主要运输方式。VLCC 船是该领域主要的运输工具,但VLCC 船体形态庞大,受到的环境作用力更加显著。因此,针对VLCC船进行节能航线优化对节能减排至关重要,也成为航运领域研究的重要课题之一。
早期研究将船舶航线优化问题简化为二维路径搜索问题,并将船速或主机功率设为固定值。例如,KLOMPSTR等[1]采用等时线方法求解以最小预计到达时间为目标的船舶航线优化模型。BIJLSMA等[2]基于最优控制理论,应用动态规划求解以最小燃料油耗为目标的船舶航线优化问题。PADHY等[3]将待行驶区域进行栅格化处理,并应用Dijkstra 算法求解考虑天气影响下的最小油耗问题。然而,在实际航行过程中,由于航行周期长且天气状况多变,很难保持相同的航速和主机功率。上述研究忽略了天气和船舶自身约束对航行过程的影响。因此,为更精确地求解船舶在复杂多变海况下航行的最小油耗,近年来有许多基于三维优化模型和算法的研究成果。
ZACCONE等[4]基于天气预报图构建了最小船舶油耗模型,并应用三维动态规划算法对模型进行求解。WANG 等[5]基于大圆航线生成备选航路点和预计到达时间集合,成功降低了问题规模,并采用3D Dijkstra算法对其进行求解。楚金华等[6]研究了碳排放区影响下的航线、航速优化问题。但节能航线优化问题涉及到多个因素的综合考虑,包括航线长度、海况、油耗和航行时间等。由于这些因素的复杂性,使得该问题求解规模较大,使用精确算法需要耗费大量的计算时间。
为解决求解效率低下的问题,大量学者尝试用智能优化算法求解该问题,其中以粒子群算法居多。WANG 等[7]考虑了船舶非自愿减速,依据经度线划分航段,应用自适应粒子群算法来求解这一问题。DU等[8]则考虑风浪影响及多种约束条件,应用改进的粒子群算法求解该问题。MA等[9]参考等时线方法,构建一种分层映射模型,以实现航速和航向的同时决策。
现如今已有大量学者针对节能航线优化问题展开研究,但仍存在以下不足:
(1)现有研究主要分为基于大圆航线生成备选航路点(航路—航速模型)和基于改进等时线思想构建的节能航线优化模型(航向—航速模型)。然而,目前对于两种模型应用场景的讨论仍有待深入。
(2)节能航线优化问题是一个大规模非线性优化问题,问题规模呈指数增长,多采用智能优化算法求解。近期研究多基于粒子群算法求解该问题。然而,粒子群算法中一旦所有粒子趋向于同一个位置,算法的多样性降低,难以跳出当前局部最优解。这些问题限制了现有方法在解决节能航线优化问题上的效果,故仍有必要尝试其他算法来寻求更好的解决方法。
本文主要贡献是考虑了复杂海况下风浪的影响,建立两个船舶油耗最小化的航线优化模型:基于备选点的航路—航速优化模型和基于等时线思想的航向—航速优化模型。为求解这两个模型,提出一种基于人工势场原理的改进蚁群算法,以提高算法的搜索效果和收敛速度。经过对比相似规模的两个模型在求解效果上的表现,评估其性能,并对模型特点进行深入分析。研究结果表明,两种航线优化模型各有优势,提出的改进蚁群算法为解决复杂海况下船舶油耗最小化问题提供了有效的解决方案和理论支持。
1 问题描述
在实际航行过程中,航线通常在出发前就规划完成,但在实际航行过程中若一味遵循规划路线航行,不考虑环境对船舶的作用力,逆着风向或者洋流航行,往往会导致额外油耗。相反,若在航行过程中顺着风向或洋流方向前进,则会降低油耗,节省燃油成本。
船舶天气航线优化问题是通过获取起始港到目的港的天气信息,决策在当前环境下的最佳航线和航速。船舶在航行到预报信息更新的时间步长后,基于最新的天气信息重新确定当前位置到目的港的最优航线。通过多次规划,最终到达目的地,确保了航行过程中船舶能够根据最新的环境情况做出调整,提高航行效率和安全性。天气航路系统如图1所示。

图1 天气航路系统示意图Fig.1 Schematic diagram of weather route system
2 模型构建
2.1 模型假设
本文模型假设如下:
(1)在气象数据更新时段内,假设风和洋流的情况保持不变;
(2)在航行过程中,将船舶视为一个质点;
(3)假设船舶能够按照预期方案航行,即在确定了航速、航向角后,能够准确地遵循指定的航行任务。
2.2 符号说明
本文涉及的集合、参数和决策变量及其说明如表1所示。
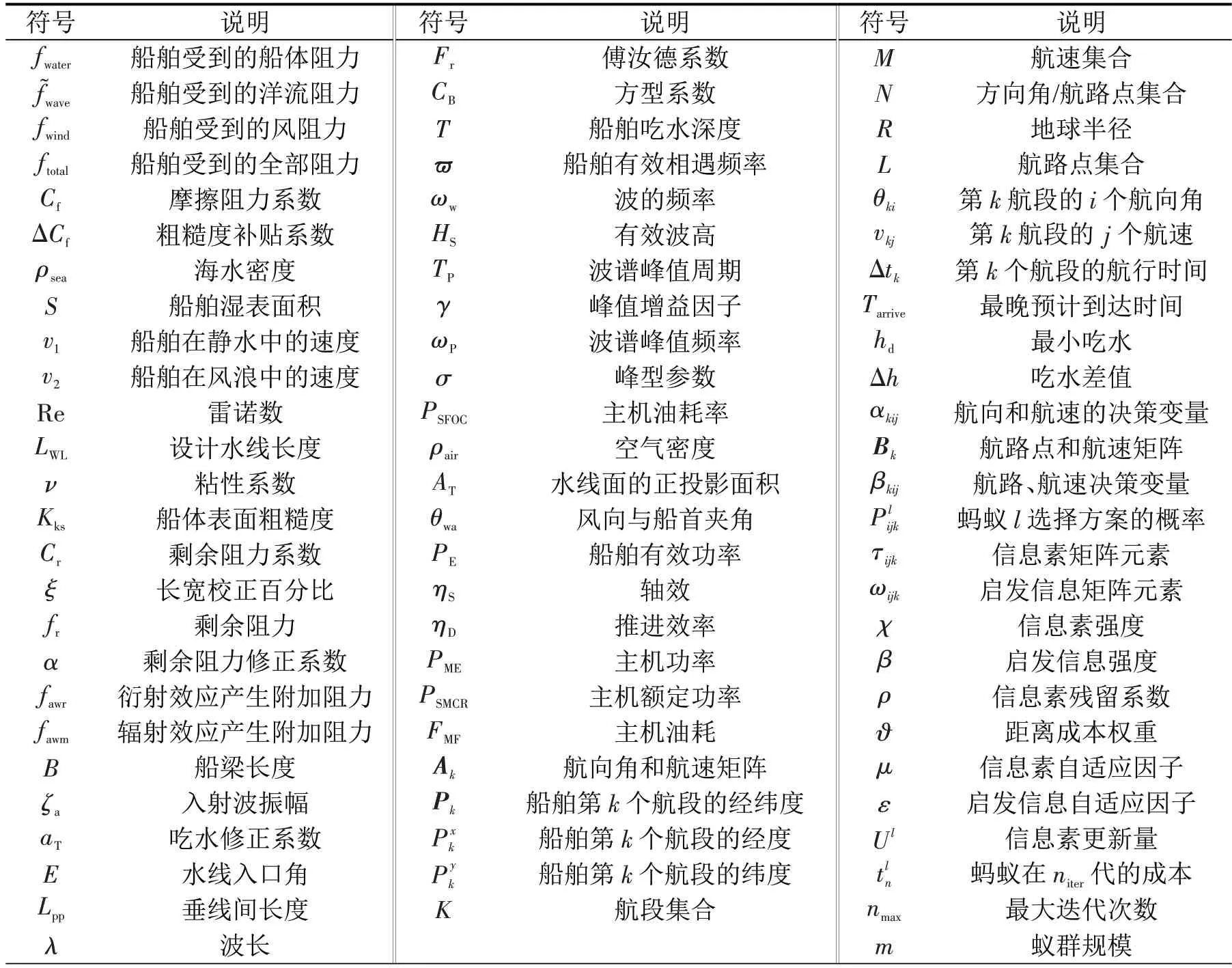
表1 集合、参数及变量说明Table 1 Description of sets,parameters and variables
2.3 船舶阻力模型构建
船舶航行过程中受船体阻力、风附加阻力和波浪附加阻力影响。其中,船体阻力fwater方向为船首船尾方向,风附加阻力Fwind和浪附加阻力Fwave方向分别与风浪方向相对应。风附加阻力和浪附加阻力分解到垂直船身方向的分力记为,风浪与船身方向呈一定夹角时,由于船体在风浪方向上的非对称性,会使得分解出的力作用位置不在船体重心位置,从而形成一个转首力矩。若船舶想沿着从A到B点的最短直线航行,则可以通过调整舵的角度提供的侧向力frudder产生反向力矩来平衡上述转首力矩,分解到船首船尾方向的力fwater、fwind和fwave则由螺旋桨提供的推力Fthrust平衡,进而保证船舶顺利航行。船舶受力分析如图2 所示。任意时刻船舶总阻力为

图2 船舶受力示意图Fig.2 Schematic of forces acting on a ship
2.3.1 船体阻力模型
船舶航行过程中,船体阻力是由于船体在静水中移动时与水之间发生的相互作用而引起的。在船舶行驶时,水流沿着船体表面移动,同时也会对船体施加阻碍力。这种阻碍力取决于船体的形状、尺寸及水的黏性等因素。船舶航行过程中的船体阻力由摩擦阻力和剩余阻力组成。
摩擦阻力使用平面公式进行计算,即
其中,摩擦阻力系数Cf采用Schoenherr公式计算,即
粗糙度补贴系数ΔCf参照ITTC-1957[10]计算,即
剩余阻力计算公式为
本文采用Lap-Keller 图得出剩余阻力系数,Lap-Keller图是一种常用于船舶流体力学研究的图表工具,用于表示船舶的阻力特性。通过对图进行多项式拟合,插值得到剩余阻力系数。同时引入剩余阻力修正系数,即
式中:A1,B1,C1,A2,B2,C2为通过多次船模实验数据拟合得出的参数。
2.3.2 波浪附加阻力模型
波浪附加阻力的产生可以追溯到船体与波浪之间的相互作用。当船体遭遇波浪时,波浪会使船体在垂向上产生上下起伏的运动,从而产生波浪阻力。为了更准确地描述波浪附加阻力,参照LIU等[11]提出的波浪附加阻力公式,即
其中,衍射效应产生的附加阻力分量为
辐射作用下的附加阻力为
式中:g为重力加速度;a1,a2,a3,b1,d1为由船速和波谱决定的一些参数,计算方法参照LIU 等[11]。
对于航行中的船舶,附加阻力可以通过规则波浪中的附加阻力及JONSWAP 波谱[12]来计算,其表达式为
2.3.3 风附加阻力模型
船舶风附加阻力是指船舶在水中航行时,受到风力作用而产生的阻力,本文参照ITTC-1957[10],计算公式为
2.4 船舶航行总油耗计算
船舶主机燃烧燃料后,能量经过热能转换和动力转换等过程,最终转化为机械能输出,推动船舶前进。船舶航行过程中主机功率及油耗为
由于船舶总油耗可以视作克服船体阻力、风附加阻力和浪附加阻力做功而产生的油耗,故式(16)在实际计算中可展开为
对船体阻力油耗FMF,water、风阻油耗FMF,wind、浪阻油耗FMF,wave分别进行计算,即
由于每艘船主机型号不同,而主机燃料消耗率与主机型号有关,参照DU等[13]的研究,拟合主机油耗转化率为
式中:α1,α2,α3,α4为多项式拟合系数。
2.5 航线优化模型
2.5.1 航向—航速航线优化模型构建
基于等时线思想的航向—航速航线优化模型将船舶航行路线定义为一组基于等时间间隔的节点,在到达下一个节点之前,船舶的航速和航向角保持不变。模型原理如图3所示。
本文将航速和航向角离散成备选矩阵,每个航段的决策均从矩阵中选择,表示为
每次决策过程中节点的转移关系为
航行过程中约束为
式(27)表示每个航段仅有一种决策方式,式(28)表示K个航段共计决策K次,式(29)表示船舶最大转角约束,式(30)表示船舶航行总时长要小于预计到达时间,式(31)表示船舶航行过程中要满足最小富裕水深,depth(Pk→Pk+1) 表示从Pk点行驶到Pk+1点过程中的船舶吃水,式(32)表示决策变量为0-1变量。
2.5.2 航路—航速航线优化模型构建
基于预设航路点的航路—航速航线优化模型的核心思想是枚举所有可行的航路点和速度集合,在航行区域生成一个航路点网络。本文参照DU等[13]的研究,基于大圆航线生成航路点网络,其中每一航段预设航路点索引如图4所示。
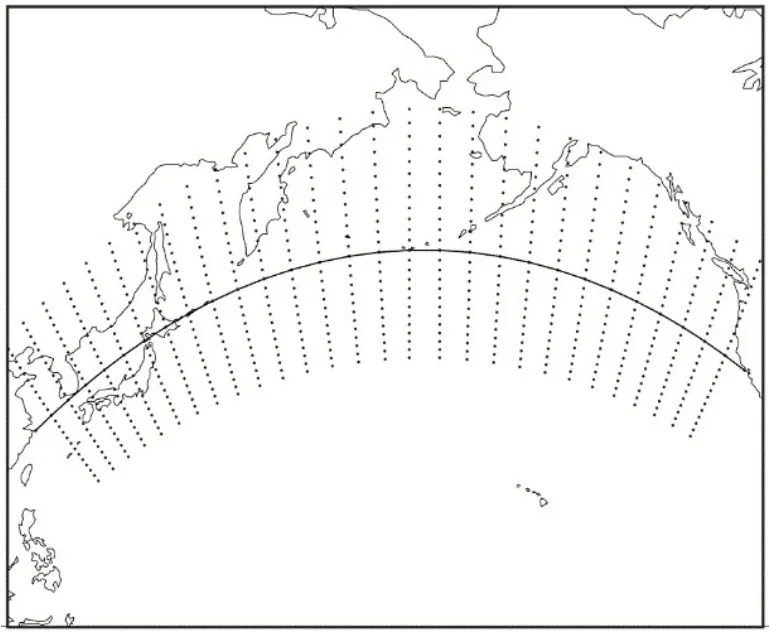
图4 航路—航速优化模型原理Fig.4 Principle of route-velocity planning model
同样将航路点和航速组合离散成一个矩阵,即
每个航路点的坐标信息为
地球是一个近似于椭球体的球体,使用经纬度表示地球上的位置,本文采用大圆距离公式(Haversine Formula)来计算航线上相邻两个航路点之间的球面距离,即
式(38)表示每个航段仅有一种决策方式,式(39)表示K个航段共计决策K次,式(40)表示船舶最大转角约束,式(41)和式(42)表示船舶航行总时长要在时间窗内,式(43)表示船舶航行过程中要满足最小富裕水深,式(44)表示决策变量为0-1变量。
3 改进蚁群算法设计
蚁群算法是一种应用广泛的启发式算法,其主要思想是模拟了蚂蚁觅食的行为。在众多启发式算法中,蚁群算法因其简单、高效和易于实现的特点而备受研究者关注。
蚁群算法在处理高维、复杂的优化问题时效果较差,主要原因是蚁群算法过于依赖信息素和启发式信息来搜索解空间。在高维空间中,信息的传播和搜索过程更加困难,使得算法容易陷入局部最优。本文基于人工势场思想对蚁群算法进行改进,有效提升了算法的搜索效率。
3.1 选择概率函数
在个体寻优过程中,状态转移概率函数主要基于群体的信息素分布以及不同备选决策影响下的势能成本所构建的启发式信息确定。在第n次迭代中,先计算处于当前状态的蚂蚁到下一阶段备选决策点的转移概率,随后通过轮盘赌选择下一状态。转移概率计算方式为
3.2 势场力启发函数
传统蚁群算法在构造启发函数时通常只考虑当前节点到下一阶段的成本,但在航线优化问题中,船舶需要到达指定目标点。如果仅考虑当前阶段到下一阶段的成本,船舶可能会远离终点。另外,蚁群算法具有正反馈性,前期蚂蚁在未搜索到可行解时释放信息素,会大大降低后续蚁群的搜索效率。
为解决传统蚁群算法存在的问题,本文引入人工势场思想改进启发函数。将终点视为引力场的中心,通过将当前节点到下一节点的成本和下一节点到终点的估算成本进行加权,改进启发函数。使得转移成本与潜在成本较小的节点被选择的概率更大。
在算法搜索的后期阶段,为避免陷入局部最优解,引入自适应调节因子,降低启发函数对搜索的影响。nmax为算法最大迭代次数,改进后的启发函数为
式中:Cost(Pk→Pk+1) 和Cost(Pk+1→PK)分别为当前节点到下一节点的成本和下一节点到终点的估算成本,使用Haversine formula 投影和设计航速进行估算;ϑ为距离权重,决定下一节点成本和到终点成本对信息素矩阵的影响程度。
3.3 信息素更新策略
传统蚁群算法只在途经的节点遗留信息素,导致节点之间的信息素差值较大,搜索过程往往只关注部分节点,容易使算法陷入局部最优解。为保留较优的信息并使后续蚁群远离障碍物,参考人工势场法设计自适应信息素更新机制。
本文基于与历史最优解所在节点的距离构建信息素矩阵,使得距离历史最优解较近的节点具有较大的被探索概率。这样可以增加对较优方案周围区域的探索。同时,本文还引入自适应因子ε,该因子随着优化值的增大而增大。本文信息素更新机制为
3.4 算法实现流程
改进蚁群算法的实现步骤如下。
Step 1 初始化算法参数,读取环境信息,设置航线起点和终点。
Step 2 航向—航速优化模型基于坐标网格,航路—航速优化模型基于航段、航路航速组合矩阵构建初始信息素矩阵。
Step 3m只蚂蚁从起点开始搜索路径。
Step 4 将势场力启发函数、信息素矩阵代入状态转移概率公式,依据轮盘赌选择下一节点,直到形成完整航线。
Step 5 根据历史最优值和节点网络距离矩阵,依据式(48)~式(50)更新信息素矩阵。
Step 6 判断是否达到最大迭代次数,如果达到最大迭代次数则输出最优路径;否则,返回Step 3。
4 算例及结果分析
4.1 算法性能验证
为验证算法性能,选取越南岘港(15N,109E)至中国东海(22N,121E)中国原油进口航线的部分航段作为展示算例。总航程预计完成时间为60 h。其中航路—航速优化模型共设置航段20 段,每段航路点19 个,速度离散为11~18、步长0.5 的集合;航速—航向优化模型设置航段20 段,每段航向角离散为0~90、步长5的集合,航速离散为9~16、步长0.5 的集合,算例规模相近。算例的公共参数通过大量实验分析后设置,如表2所示。
为减少结果的随机性,以MATLAB 2023a为仿真环境,两个模型分别用传统蚁群、粒子群和改进蚁群这3种算法重复求解100次后输出结果,如表3所示。图5和图6为两种模型下的迭代曲线对比。
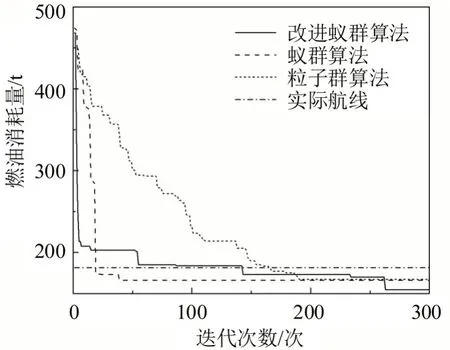
图5 航路—航速优化模型迭代曲线图Fig.5 Iterative curve graph of route-speed optimization model
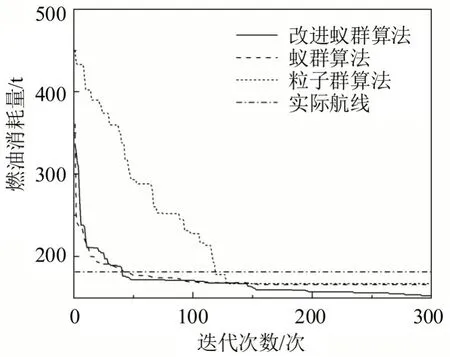
图6 航向—航速优化模型迭代曲线图Fig.6 Iterative curve graph of heading-speed optimization model
实际航行过程中该算例的油耗为181.6 t,传统蚁群算法求解航路—航速和航向—航速优化模型的油耗降低率分别为9.75%和8.04%;粒子群算法求解两个模型的油耗降低率分别为9.3%和6.2%;改进蚁群算法求解两个模型的油耗降低率分别为11.3%和11.7%。由运行结果可知,3种算法均能有效降低油耗,但改进蚁群算法的效果更好。此外,通过观察迭代曲线可以发现,粒子群算法和传统蚁群算法在处理大规模问题时很快地收敛到局部最优解,而改进蚁群算法则能够更好地跳出局部最优解。这进一步证明了改进蚁群算法的效率更高。
4.2 不同场景下模型求解效果对比
对比航路—航速优化模型和航向—航速优化模型在不同场景中的表现情况。本文选取中东—东亚原油航线上两个不同的航段作为研究对象。场景1 是从越南岘港(15N,109E)至中国东海(22N,121E)的开阔水域段,此处水域几乎无障碍物,预计到达时间为60 h。场景2 是从(29N,49E)到(24N,60E)的波斯湾出口航段,这段航道较为狭窄,且存在较多障碍物,预计到达时间为70 h。
本文采用改进蚁群算法对模型进行求解,并将结果与实际运营的航线进行对比。场景1 下求解航线如图7 所示,场景2 下求解航线如图8 所示。实验结果如表4所示。可以看出,在以上两个场景下,两种模型均能有效降低油耗。
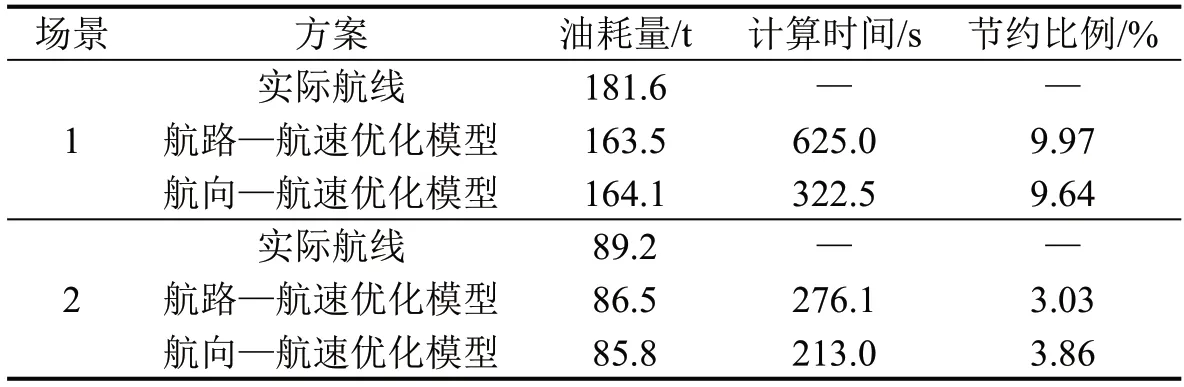
表4 不同场景下求解结果对比Table 4 Comparison of solving results in different scenarios
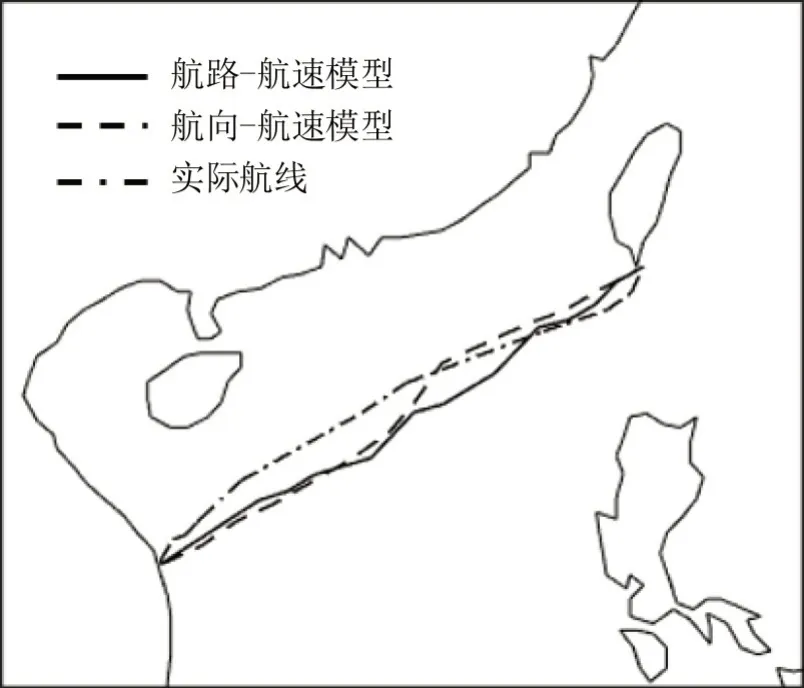
图7 开阔水域下求解航线对比Fig.7 Comparison of solving flight routes over open waters

图8 狭窄水域下求解航线对比Fig.8 Comparison of solving flight routes in narrow waters
在场景1中,航路—航速优化模型表现出较好的效果,但其需要较长的求解时间;在场景2中,航向—航速优化模型的求解效果较好,相比于航路—航速优化模型,其求解时间较短,证明航向—航速优化模型能够更好地适应较多障碍物的水域。
经分析,两个模型在不同场景下产生差异的原因如下:
(1)为减少船舶油耗,节能航线会偏离大圆航线,但由于航线长度仍是影响船舶油耗的重要因素之一,故其偏移程度较低。航路—航速优化模型的备选节点生成基于大圆航线,其均匀分布于大圆航线两侧。航向—航路优化模型的备选节点则是基于前若干航段中航向角和航速的选择,其形态类似树状图,由于其覆盖范围较大,故在相似规模算例情况下,其不如航路—航速优化模型集中,求解精度会小于航路—航速优化模型。
(2)相比较场景1,场景2的模型预设规模相似情况下,算法运行时间大大降低,且航路—航速优化模型的降低更为显著。这种情况是因为在狭窄水域中存在大量不可行解,降低了求解规模。场景2的优化效果相较于场景1也较差,推测原因是航道较窄,使得航线差异较小,且在波斯湾航行过程中存在诸多航速限制,也使得航速优化空间较小。这对依赖于预先设定航路点的航路—航速优化模型影响更大。而航向—航速优化模型在狭窄的航路中有效航路点数量更多,故其求解效果更优。
(3)航向—航速优化模型通过决策下一航段的航向和航速,将航向角和航速两个决策变量的问题转化为不同方向和速度下的备选航路这一决策变量。有效降低了问题的求解复杂度,故其在不同场景下的运算和收敛速度均优于航路—航速优化模型。
综上所述,在障碍物较少的开阔水域,使用航路—航速优化模型的求解效果更佳;在障碍物较多或者航道较为狭窄的水域,使用航向—航速模型则能快速、高效地求解节能航线。
4.3 油耗分解及效果分析
为探究节能航线优化原理,深入分析航向—航速、航路—航速以及实际航行中的航线。依据式(18)~式(20)将3种情景下的油耗分解为船体阻力油耗、风附加阻力油耗和浪附加阻力油耗,并进行对比,结果如图9所示。
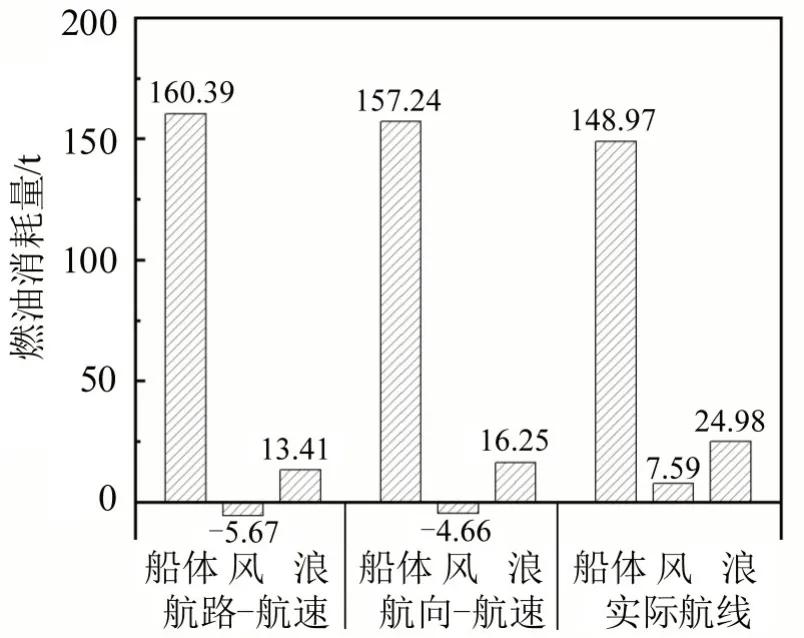
图9 总油耗分解Fig.9 Decomposition of total fuel consumption
计算结果表明,相较于实际航线,节能航线通过适当绕行规避风浪,虽然这导致了船体阻力油耗的增加,但风附加阻力和浪附加阻力油耗得到了显著地降低,甚至风附加阻力油耗一度降到负数(即顺风行驶)。在节能航线中,规避风浪所增加的船体阻力油耗较小,而风附加阻力和浪附加阻力产生油耗的减小使得总体油耗的降低效果更为显著。这说明选择一条经过适当绕行的节能航线,能够最大程度地降低航行中的风阻和浪阻,从而实现航行油耗的最小化。
4.4 预计到达时间约束下的节能航线成本
为验证不同预计到达时间对船舶油耗的影响,设定不同的预计到达时间对油耗进行求解,结果如图10所示。
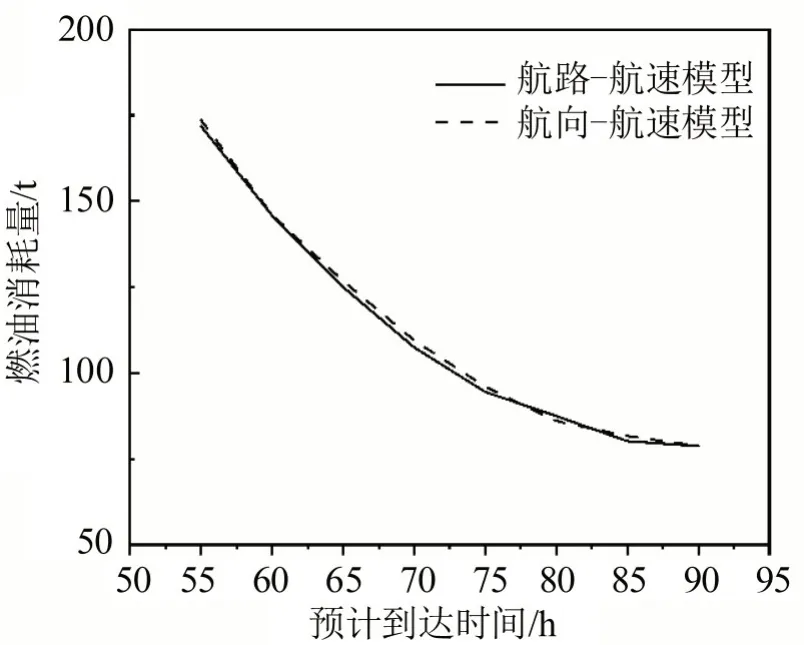
图10 不同预计到达时间下的油耗Fig.10 Fuel consumption under different estimated time of arrival
可以观察到,随着预计到达时间的放宽,油耗呈现下降趋势,因为慢速行驶能够有效地减少油耗。然而,随着预计到达时间的增加,油耗的降低速度逐渐减慢,这是因为在预计到达时间较长的情况下,其他因素(如船舶最小航速)开始对船舶油耗产生影响,因此进一步降低油耗的效果有所减弱。故在实际运营中应综合考虑需求,以在节能减排和时间约束之间取得平衡。
5 结论
(1) 本文构建两种VLCC 节能航线优化模型,并设计了改进蚁群算法进行求解。通过算例实验证明,两种模型均取得了显著的节能效果。
(2)放宽船舶预计到达时间会降低船舶油耗。实验结果表明,随着预计到达时间的放宽,油耗呈现下降趋势。这是因为慢速行驶能够有效地减少油耗。然而,随着预计到达时间的增加,油耗的降低速度逐渐减慢。这可能是因为在航程较长的情况下,船舶的最小航速等其他因素开始对船舶的运行产生影响,进一步降低油耗的效果有所减弱。
实际的营运过程中,需要权衡考虑船舶的航速配置,以在节能减排目标和时间约束之间取得平衡。本文提出的两种优化模型都能够有效降低成本,但在算法的适用环境和运行速度方面存在差异。因此,在实际应用时,可以根据航道的特点选择合适的模型。
本文在船舶节能航线优化方面已经取得了一定的成果,但仍存在一些不足之处:
(1)本文模型是离散模型,决策变量离散程度影响优化结果。下一步计划构建连续模型。更精准地反映船舶的节能潜力,节约船舶油耗。
(2)本文中对船舶油耗的估算还停留在理论层面。未来的研究将继续细化环境因素对船舶油耗的影响,并结合深度学习等技术构建更精准的油耗模型,为船舶节能航线优化提供更科学的方案。
猜你喜欢
舰船科学技术(2022年22期)2022-12-13
车主之友(2022年5期)2022-11-23
水上消防(2022年1期)2022-06-16
舰船科学技术(2018年7期)2018-07-25
上海铁道增刊(2017年3期)2018-01-22
车迷(2017年12期)2018-01-18
哈尔滨商业大学学报(自然科学版)(2016年4期)2016-09-02
舰船科学技术(2016年1期)2016-02-27
海军航空大学学报(2015年3期)2015-11-11
中学历史教学(2015年11期)2015-11-11