无人直升机舰面起降鲁棒姿态控制器设计
2024-01-04 05:10姚志豪祖家奎叶晓宇刘世龙
机械与电子 2023年12期
姚志豪,祖家奎,叶晓宇,刘世龙
(南京航空航天大学自动化学院,江苏 南京 211106)
0 引言
舰载无人直升机作为一种重要的海上武器装备,能够执行多项任务,有效增强载舰的作战能力[1]。舰面起降是舰载直升机执行任务时的必备环节,通常要求能够在4~6级海况下能够正常工作,受到高海况影响,在舰船的甲板处易形成舰尾流,这种随机性的尾流是影响舰面起降任务最大的制约因素。舰尾流对直升机姿态造成扰动可能导致机体撞击甲板,极大增加了起降阶段的危险系数。针对飞行控制问题,在国外现代控制技术应用广泛,显模型跟踪控制已应用于ADOCS和RASCAL项目中,BO-105的姿态控制采用特征结构配置,而我国舰载无人机研发起步时间较晚,舰面起降姿态控制大多仍使用常规PID控制,难以满足舰载直升机对控制精度、解耦能力和鲁棒性能的要求,与国外先进水平还有较大差距。设计出在舰尾流环境下稳定、高鲁棒性的姿态控制器,可以为解决直升机舰面起降这一难题打下坚实基础。
本文对舰尾流扰动进行建模并作为干扰输入加入直升机模型中,探究舰尾流对直升机的姿态影响。为提高直升机姿态的鲁棒性,针对横向、纵向和偏航3个通道设计改进的线性自抗扰姿态控制器,并通过与常规PID控制器在控制量扰动和舰尾流扰动场景下的响应对比,验证本文控制方法的效果以及运用于舰面起降鲁棒姿态控制的合理性。
1 舰尾流扰动下的直升机模型
1.1 直升机模型
假设直升机为刚体,根据牛顿第二运动定律,直升机线运动方程为[2]
(1)
根据动量矩定理,可以得到角运动方程为
(2)
根据角运动相互关系,可以得到三轴姿态角与三轴角速率之间的关系方程为
(3)
式(1)~式(3)为直升机全量运动方程,u、v、w为直升机机体三轴线速度,p、q、r为直升机三轴姿态角速率,φ、θ、ψ为直升机三轴姿态角,m为直升机质量,Fx、Fy、Fz为直升机三轴所受合力,Ix等为直升机转动惯量。为了方便研究分析,本文使用小扰动理论[3]对模型进行线性化处理,将直升机运动看作基准状态下受到一个微小的扰动,如θ=θ0+Δθ,将其代入全量方程中,可以得到直升机线性化模型的状态空间表达式为
(4)
其中,状态向量X=[φ,θ,ψ,u,v,w,p,q,r]T,为直升机的三轴姿态角、线速度和姿态角速率;控制向量U=[δcol,δail,δele,δrud]T,分别为4通道变距;输出Y=[φ,θ,ψ,u,v,w,p,q,r]T与状态变量相同。
式(4)中,C=I9×9,D=09×4。
(5)
(6)

1.2 舰尾流模型
舰尾流是舰船在航行过程中受甲板、海浪、海风和舰船上建筑物的影响,在舰尾区域形成的复杂的扰流区[4],本文需要对舰尾流进行建模,作为干扰进行仿真来验证控制系统性能。
参考美军标MIL-F-8785C,假设甲板风速为10 m/s,舰尾流建模仿真结果如图1~图3所示。

图1 舰尾流纵向分量u
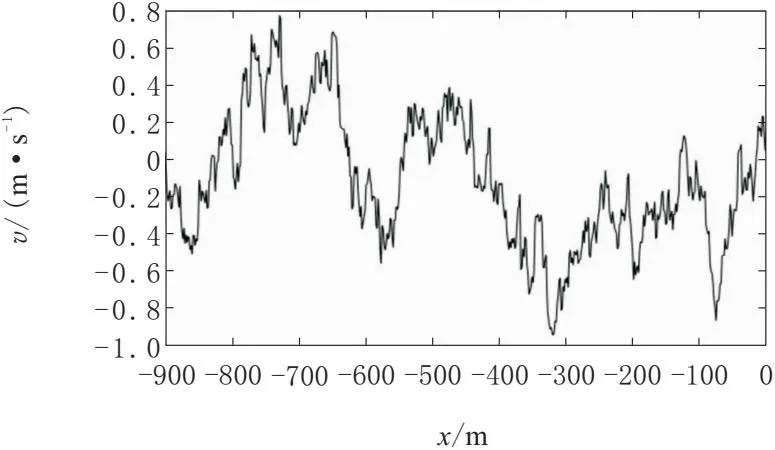
图2 舰尾流横向分量v
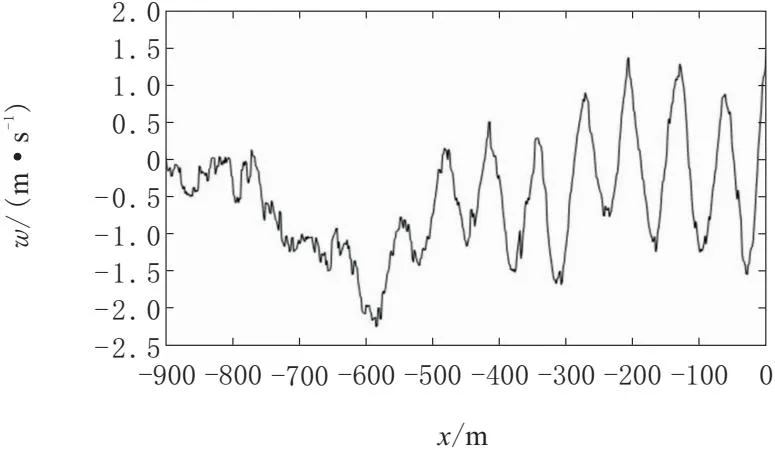
图3 舰尾流垂直分量w
由图1~图3可知,舰尾流3方向分量振荡明显,虽然幅值处于-3~+3 m/s之间,但由于直升机在起降过程中速度较小,舰尾流扰动速度若不加以处理,将对直升机姿态产生严重影响。
1.3 直升机与舰尾流一体化模型
为探究舰尾流扰动对直升机的姿态影响,本文将建立直升机与舰尾流的一体化模型。在风对飞行的影响方面,可以分为2类。第1类为确定性的风扰下的飞行运动;第2类为随机连续风扰下的飞行运动,即飞机对随机输入的响应问题[5],本文中的舰尾流干扰可以归结为第2类。舰尾流对直升机的干扰可以近似视为一系列强度不同且持续时间很短的连续稳态阵风作用,会使得直升机模型产生速度变化趋势。根据直升机对风扰动的一般研究方法,直升机状态方程(4)可以表示为
(7)
W=[uwind,vwind,wwind]T为风扰动量;C为扰动矩阵,C矩阵内元素为3方向扰流速度对直升机状态变量影响的气动导数,矩阵表达式为
(8)

2 鲁棒控制器设计
2.1 舰尾流环境下直升机特性分析
无人直升机独特的机械结构使其在特性方面与固定翼飞机有很大的差别,舰面起降独特的工作环境使得舰尾流扰动下特性与常规直升机不同[6],通过对象特性分析可以为后续控制律设计提供方向。直升机在起降任务中大多和舰船保持速度相同,故选择高度为100 m,速度为10 m/s的条件进行特性分析,探究舰尾流扰动对直升机的影响。通过分别给定3方向舰尾流扰动冲激信号,得到对应的姿态角的响应曲线如图4~图6所示。
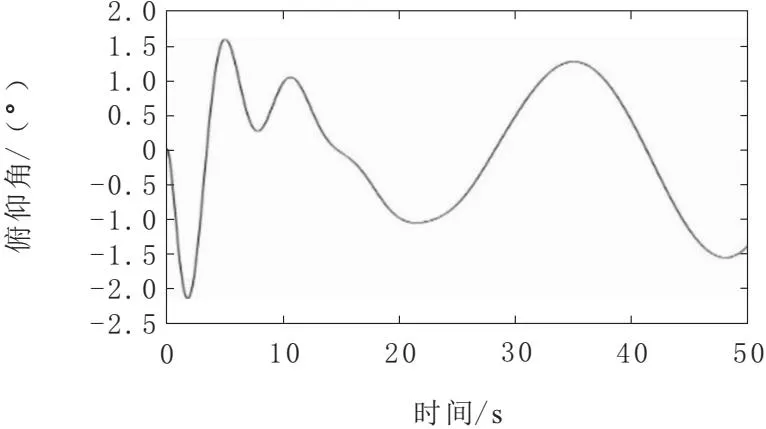
图4 俯仰角对纵向舰尾流的响应
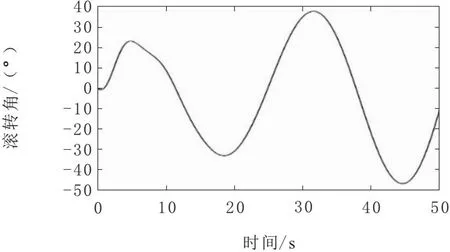
图5 滚转角对横向舰尾流的响应
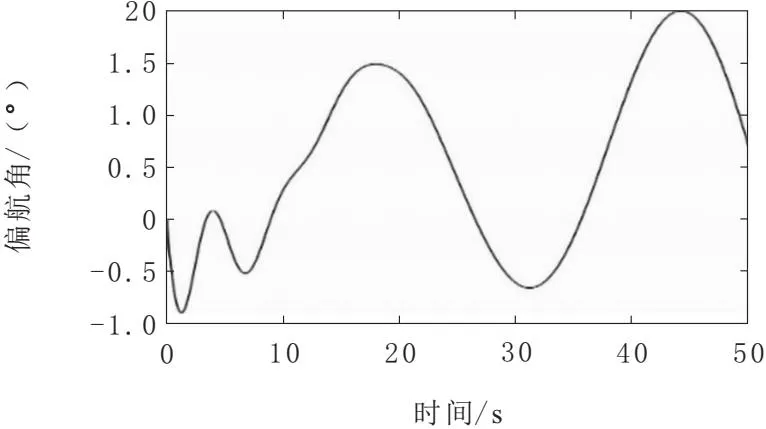
图6 偏航角对垂向舰尾流的响应
由图4~图6可以看出,3通道姿态角在受到舰尾流扰动后有发散趋势, 与俯仰角和偏航角相比, 滚转角振荡幅度更大。因此,在受到舰尾流扰动影响时,不加强控制器的鲁棒性将对直升机姿态造成严重影响。
2.2 姿态控制器设计
为在舰尾流扰动下对飞行姿态进行高鲁棒性控制,本文设计的姿态控制结构如图7所示。
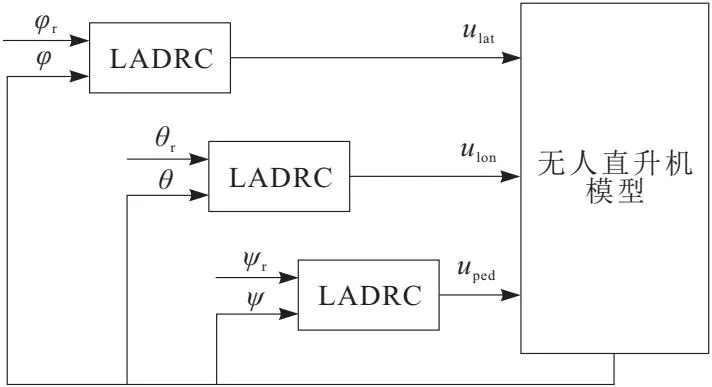
图7 直升机姿态控制器结构
本文使用3个改进线性自抗扰控制器(LADRC)对俯仰、滚转和偏航通道进行控制。各通道改进线性自抗扰控制器结构如图8所示。

图8 改进线性自抗扰控制器结构
改进线性自抗扰控制器由跟踪微分器(TD)、线性扩张状态观测器(LESO)和线性状态误差反馈控制律(LSEF)3部分组成[7]。跟踪微分器为被控对象的响应安排过渡过程,使突变输入信号v转换为平滑输入信号v1,同时提取输入微分信号v2;线性扩张状态观测器实时估计系统状态z1、z2与扰动信息z3;线性状态误差反馈控制律以线性扩张状态观测器为基础生成实际控制量u。
2.2.1 跟踪微分器(TD)
在传统的PID控制器中提取微分信号,微分器表达式为
(9)
该微分器存在弊端,即该微分器会导致输入信号中的噪声项放大。当输入信号中存在噪声时,式(9)为
(10)
n(t)为噪声信号,τ越小,对噪声的放大效应就越强,因此TD中使用微分近似公式代替,即
(11)
当τ1、τ2接近常数τ时,取ra=1/τ,转换为状态空间方程离散形式,即
(12)
h为积分步长;ra为速度因子,可以用于调节过渡过程的快慢。使用非线性微分跟踪器有更好的噪声抑制功能,同时兼具更高的效率,根据韩京清[8]提出的最速控制综合函数,设计跟踪微分器为
(13)
fhan函数具体表达式为
(14)
h0为滤波因子,取h0略大于积分步长h可以有效缓解微分信号对噪声的放大作用。跟踪微分器对输入信号的跟踪效果和微分提取效果如图9和图10所示。

图9 TD对输入信号的跟踪效果

图10 TD对输入信号的微分提取
图9和图10中,TD输入信号由姿态角常值10和白噪声干扰项组成,由仿真结果可知,TD将输入信号中的噪声干扰过滤,使输入信号无超调地达到稳态。同时,在微分提取方面也消除了噪声的干扰。由此可知,TD在输入信号跟踪和微分提取功能上都有很好的噪声抑制功能,将TD用于直升机姿态控制器中能够增强系统的鲁棒性。
2.2.2 线性扩张状态观测器(LESO)
扩张状态观测器是自抗扰控制的核心,也是增强系统鲁棒性的关键[9]。
设包含干扰的二阶控制系统为
(15)
y为系统输出;u为系统输入;w(t)为系统的外部干扰。将式(15)改写为
(16)
(17)
此时f成为一个新的状态变量,LESO则可以将f估计出来,并在控制器中加以补偿消除。因此,扩张新的状态变量x3=f,则式(17)变为
(18)
式(18)可以转换为状态空间表达式,即
(19)
针对该系统设计观测器,所设计的观测器为
(20)

(21)
以此扩张状态观测器就可以估计出系统状态变量观测值z1、z2以及系统的总扰动z3。
在5 s处给控制器一个幅值为5°的控制量干扰。LESO对系统扰动的观测效果如图11所示。
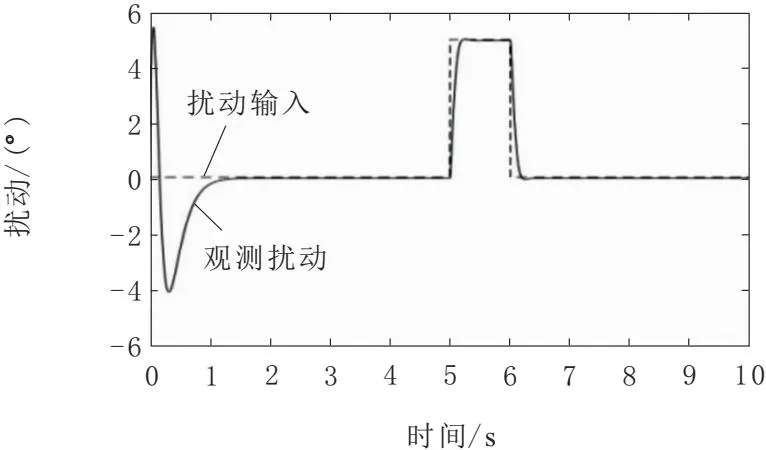
图11 LESO对扰动的观测效果
图11中,0~2 s内LESO观测到扰动,此时的扰动为系统响应的内部扰动。5 s处人为添加干扰后LESO很好地观测到了扰动。LESO对干扰的高精度观测是后续进行扰动补偿,抵消干扰影响,提高系统抗扰性的前提。
2.2.3 线性状态误差反馈控制律(LSEF)
自抗扰控制器中的LESO可以实时观测系统的内外扰动,因此,可以舍弃常规控制中的积分控制[10],将传统PID简化为PD控制,即使用姿态角和角速率与设定值的偏差进行反馈控制。结合TD跟踪微分器和LESO,PD控制律为
u0=kP(v1-z1)+kD(v2-z2)
(22)

3 仿真验证
3.1 仿真环境
本文在Simulink仿真环境下搭建了基于改进的自抗扰和常规PID的姿态控制器,从3个控制通道观察2种控制器在受到干扰时的响应曲线,以此验证所设计控制器的控制效果。仿真框图如图12所示。
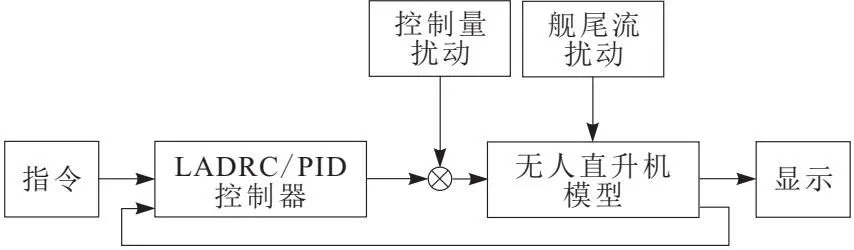
图12 仿真框图
3.2 控制量干扰
对直升机俯仰、滚转和偏航通道分别在5 s时刻加入幅值为3°、持续时间为1 s的控制量干扰,用于模拟人为操纵失误或舵机异常带来的控制量抖动,3个通道的响应曲线如图13~图15所示。
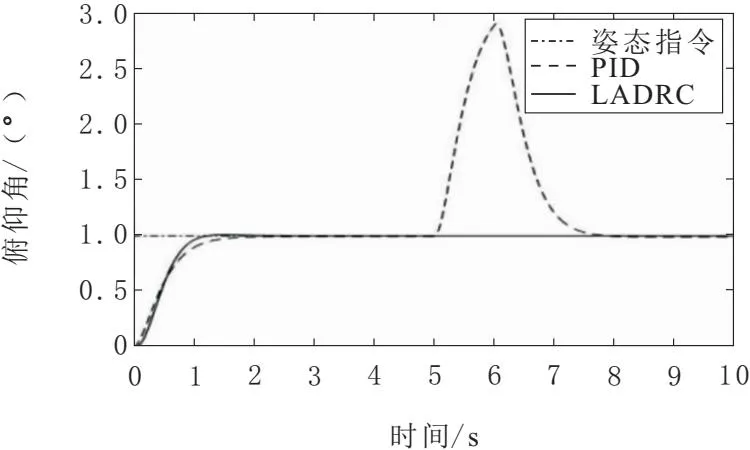
图13 俯仰角控制量扰动响应曲线

图14 滚转角控制量扰动响应曲线
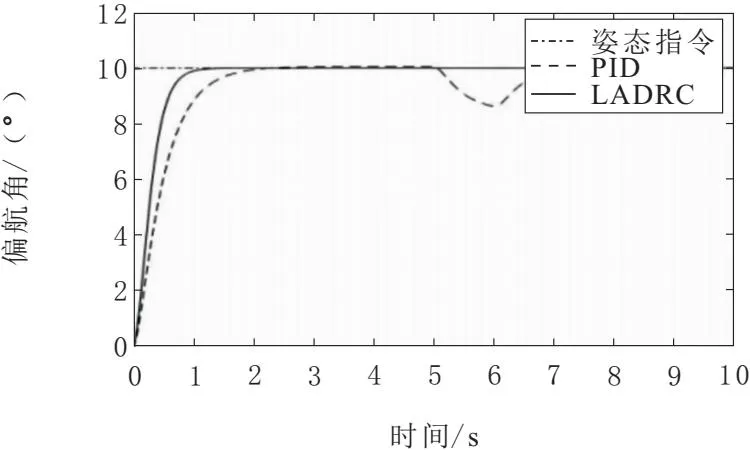
图15 偏航角控制量扰动响应曲线
以俯仰通道为例,控制性能对比如表1所示。

表1 俯仰通道控制量干扰下控制性能对比
由图13~图15和表1可知,在受到扰动时,使用常规PID控制器的响应曲线都会产生2°~3°的姿态角突变,而使用改进LADRC控制器在干扰下几乎没有影响,且调节时间更短,响应速度更快。
3.3 舰尾流干扰
将舰尾流3方向扰动分量作为外部干扰,以此模拟舰载无人直升机的工作环境,验证所设计控制器的控制性能。3个通道在舰尾流干扰下的响应曲线如图16~图18所示。
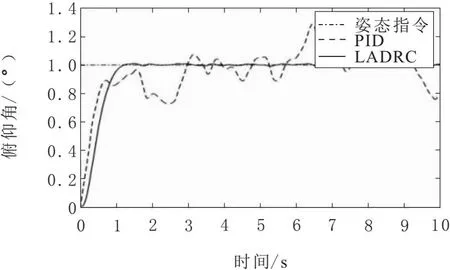
图16 俯仰角舰尾流扰动响应曲线
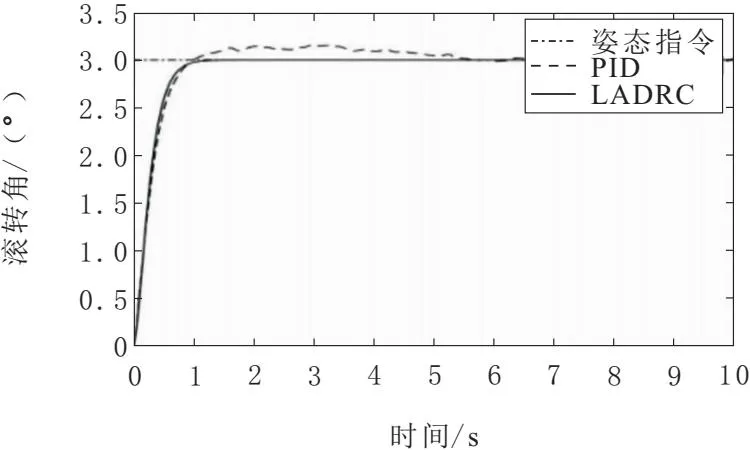
图17 滚转角舰尾流扰动响应曲线

图18 偏航角舰尾流扰动响应曲线
以俯仰通道为例,控制性能对比如表2所示。

表2 俯仰通道舰尾流干扰下控制性能对比
由图16~图18和表2可知,在舰尾流扰动下,使用常规PID控制器的响应曲线都无法保持稳态,纵向通道俯仰角的振荡最为明显。而本文设计的LADRC控制器在舰尾流干扰下的响应曲线很快保持在稳态,几乎不受影响,说明本文设计的控制器有较好的鲁棒性,可以满足舰面起降任务中的需求。
4 结束语
本文针对舰尾流干扰进行仿真建模,并建立直升机与舰尾流的一体化模型,在此基础上进行对象特性分析,发现舰尾流扰动下会导致直升机姿态角速率的发散,最终导致姿态的不稳定。为提高直升机姿态控制器的鲁棒性,本文设计了以改进LADRC为基础的直升机姿态控制器,实现了对姿态角的快速跟踪和干扰抑制。仿真结果表明,本文设计的姿态控制器相较于常规PID控制器,在2种干扰作用下拥有更好的动态特性和鲁棒性。因此,本文设计的姿态控制器可以满足舰载直升机起降任务中对控制精度和鲁棒性能的要求,对在相关领域缩小与国外差距有积极作用,对舰载无人直升机的发展和推广有现实意义。
猜你喜欢
数学物理学报(2021年2期)2021-06-09
装备制造技术(2021年1期)2021-05-21
数学物理学报(2019年5期)2019-11-29
自动化学报(2018年2期)2018-04-12
雷达学报(2017年6期)2017-03-26
广东技术师范大学学报(2016年5期)2016-08-22
北京航空航天大学学报(2016年3期)2016-02-27
天津大学学报(自然科学与工程技术版)(2015年10期)2015-12-29
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19
舰船科学技术(2015年8期)2015-02-27